
Computing in the Sky: A Survey on Intelligent Ubiquitous Computing for UAV-Assisted 6G Networks and Industry 4.0/5.0

 ,
,  ,
,  , , , ,
, , , ,  and
and 
Abstract
:1. Introduction
- We introduce UAV computing and review the existing work about UAV computing.
- We discuss how FL plays a vital role in improving UAV computing for enabling B5G.
- We identify and discuss the application of UAV computing.
2. Federated Learning
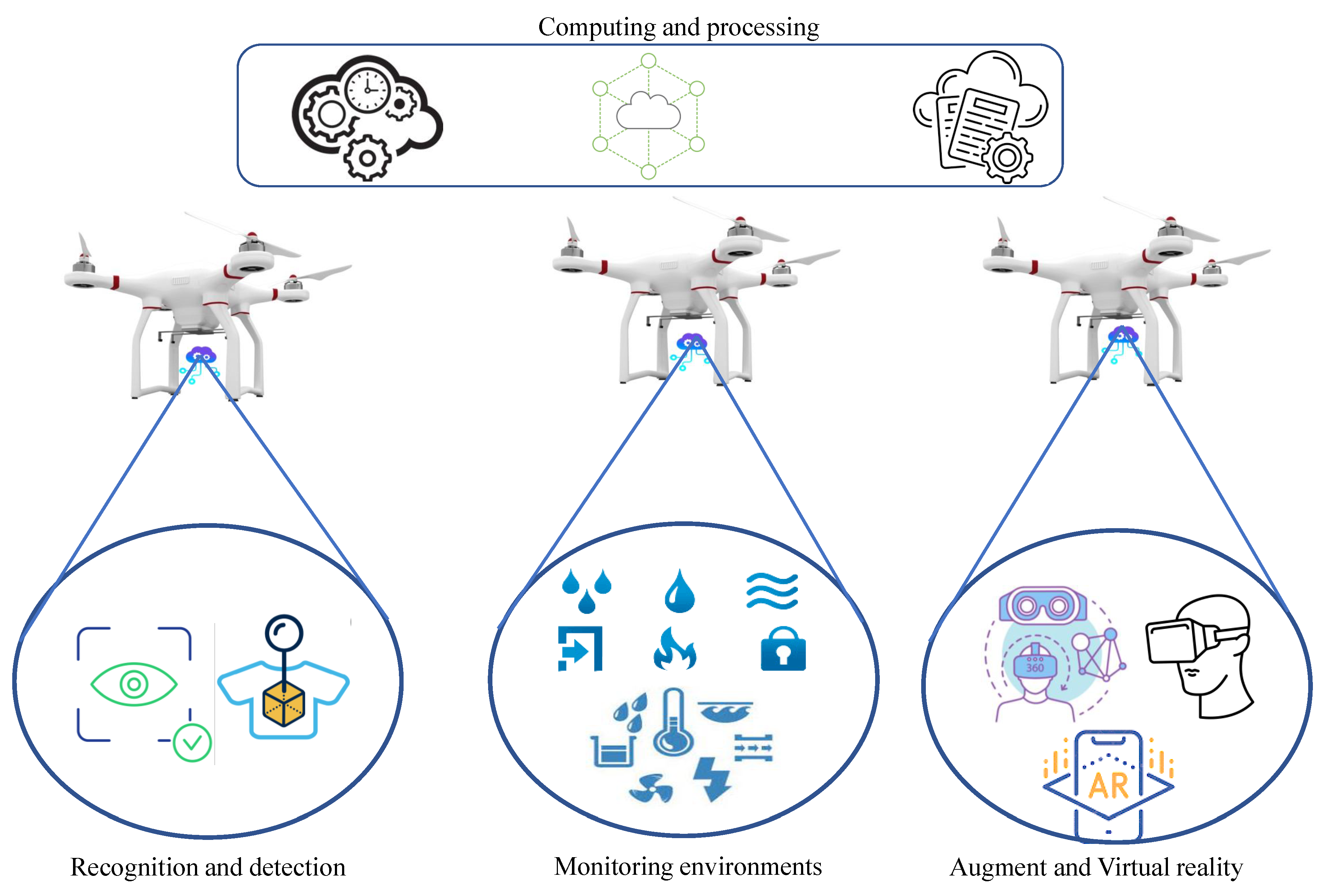
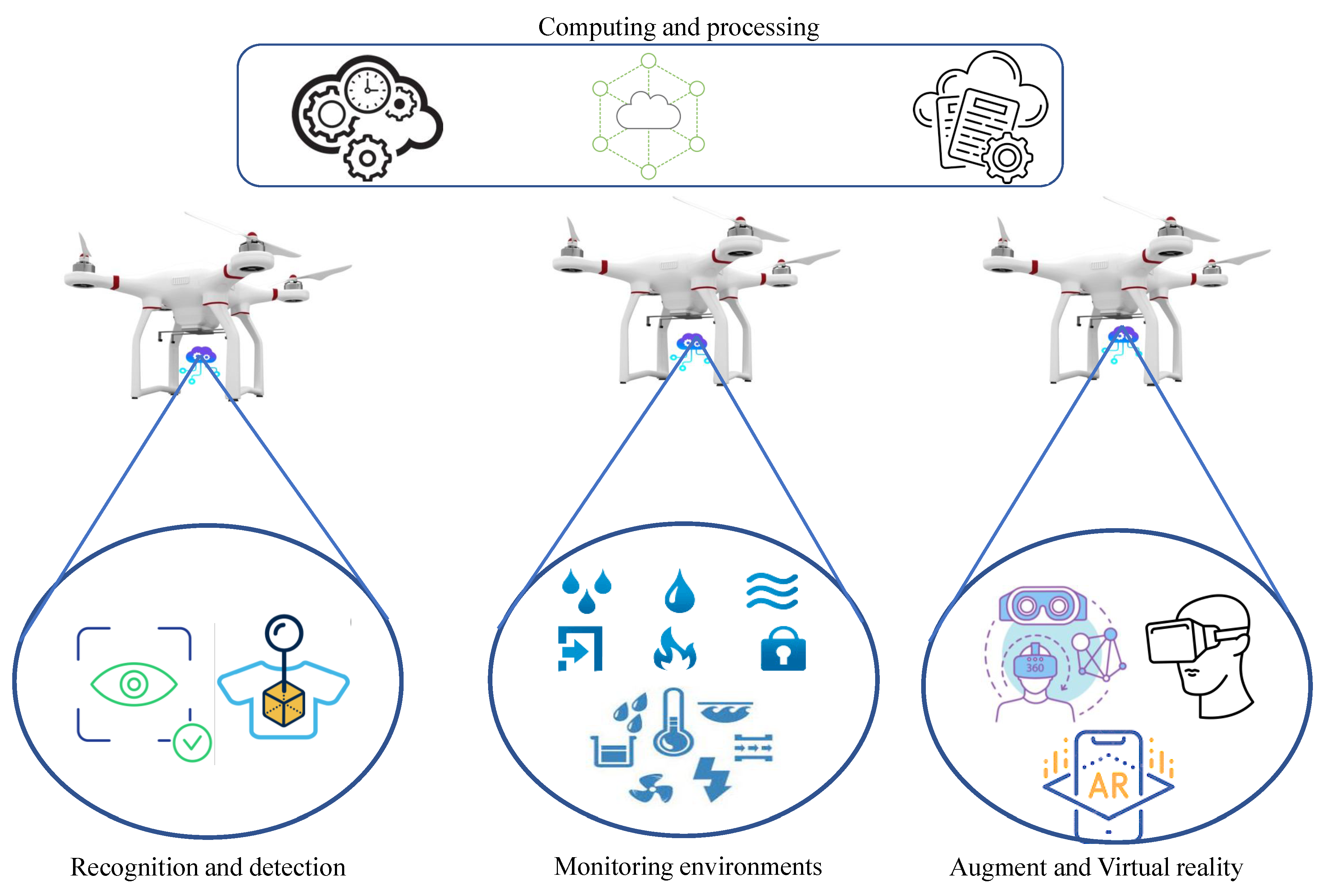
3. UAV Computing
4. Federated-Learning-Empowered UAV Computing
- WPC and EH: UAVs can be used as an MEC server and an energy transmitter for terrestrial users [13,18]. The optimization of a UAV’s trajectory is discussed to improve performance in terms of computing resources [13], whereas the authors in [18] optimized the total required energy by a single UAV in the UAV-assisted wireless-powered MEC system by jointly optimizing the UAV’s transmit power, CPU frequencies, trajectory, and offloading amount. The system, interestingly, used as MEC servers both the UAV and idle sensor devices that do not have computing tasks to offload tasks by other sensors. However, previous research on UAV-assisted Wireless-Powered Communication (WPC) [13,121,122,123] focused on communication impacts and overlooked the potential of UAV-assisted WPC in FL-enabled networks. Furthermore, the authors of [124] investigated using Energy Harvesting (EH) from stochastic sources for FL. Moreover, the authors of [125] applied DRL to tackle a UAV-FL WPC network’s long-term energy challenge.Several research papers suggest FL-based collaborative learning techniques, including UAVs. To the best of our knowledge, ref. [116] is the first work to suggest the use of FL for joint power allocation and scheduling of UAV swarms. With data privacy restrictions becoming more severe, FL adoption can help collaborative learning build successful AI models without requiring the transmission of potentially sensitive raw data to a cloud server. As a result, it is critical to think about how to construct an incentive mechanism for FL in UAV networks. Due to the lack of terrestrial connectivity and the battery limitations of FL users, conducting FL chores may be impossible. Therefore, the authors of [126] deployed UAVs and WPC for FL networks to overcome these difficulties. A UAV equipped with edge computing and WPC capabilities is deployed as an aerial energy source and an aerial server to conduct FL operations to allow sustainable FL solutions. Furthermore, the authors proposed an energy-efficient, combined approach for UAV placement, power control, transmission time, model accuracy, bandwidth allocation, and computing resources that aims to reduce the total energy consumption of the aerial server and users.
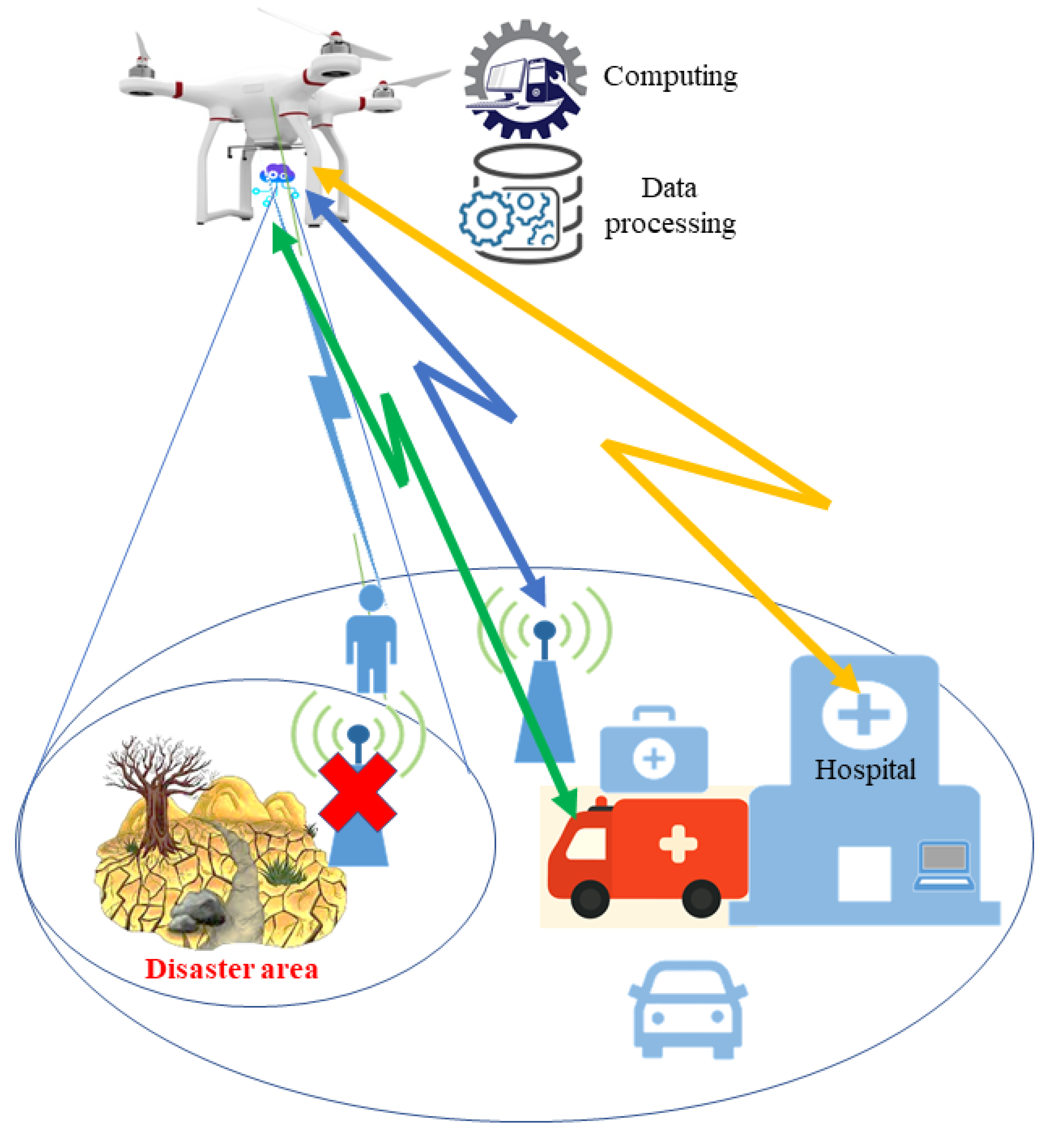
- Channels propagation: The authors of [127] presented an FL-assisted categorization strategy in which each UAV performs local training on locally obtained pictures to generate a local model. Subsequently, each UAV sends its locally acquired model over a fading wireless channel, which generates a global model, then sends it back to each UAV for the next round of local training. In addition, a Weighted Zero Forcing (WZF) transmit precoding (TPC) based on genuine, imperfect channel state information is employed at each UAV to further reduce the computational cost.The authors of [128] developed UAV-assisted disaster relief networks based on blockchain and ML to accomplish safe and efficient data transfer. The authors initially described a lightweight blockchain-enabled collaborative aerial–ground networking architecture to ensure data transmission in a disaster, followed by a credit-based delegated proof-of-stake consensus protocol to improve consensus efficiency while encouraging UAVs to be honest. A new RL-based approach is designed to intelligently offload UAV computation missions to moving vehicles in the dynamic environment by using the idle processing resources of ground vehicles.
- Reconfigurable Intelligent Surfaces (RIS): Reconfigurable Intelligent Surfaces (RIS), also known as Intelligent Reflecting Surfaces (IRS), are programmable structures that can be used to engineer the wireless propagation environment to enhance network performance. In the context of UAV air-to-ground networking, the integration of RIS is being proposed to improve the communication security and performance [129,130].Shang et al. [131] studied the UAV swarm-enabled ARIS (SARIS), including its motivations and competitive advantages over terrestrial RIS (TRIS) and ARIS, as well as its innovative wireless network applications. The authors focused on the beamforming design, SARIS channel estimate, and SARIS deployment and movement to solve the essential issues of developing the SARIS. With early numerical findings, the possible performance augmentation of SARIS was examined. To improve the performance of UAV-assisted air–ground networks, Pang et al. [129] proposed using RIS. The authors provided an overview of UAVs and RIS by describing the many uses of RIS and the compelling characteristics of UAVs and the advantages of combining them [129]. The authors next looked at two case studies in which the UAV trajectory, transmit beamforming, and RIS passive beamforming are all optimized together. The average attainable rate of the relaying network is maximized in the first case study by mounting the RIS on a UAV. The RIS is used in the second case study to aid UAV–ground communication while battling an adversary eavesdropper.
- Privacy: UAVs-based service providers for data gathering and AI model training, also known as UAVs-as-a-Service (or Drones-as-a-service, DaaS), have been increasingly popular in recent years. However, the strict restrictions controlling data privacy may make data exchange between independently owned UAVs difficult. Therefore, the authors of [132] introduced an FL-based strategy to allow privacy-preserving collaborative ML across a federation of separate DaaS providers to develop Internet of Vehicles (IoV) applications such as traffic prediction and parking occupancy management.
- Caching: Content caching in edge computing appears to be a viable approach [42]. It entails delivering popular material closer to the edge, which may be used locally at BSs or APs. Furthermore, UAVs can serve as BSs to improve caching efficiency by detecting users’ mobility and efficiently delivering popular material [133]. However, this use case inherits the aforementioned UAV deployment issues. The hybrid CNN with LSTM method is better in this situation for dealing with the spatio-temporal aspects of both mobility patterns and content request distribution. The aggregated learning model then assists in the deployment of UAVs.As mobile users, one of the primary issues of such a paradigm is determining which contents should be efficiently saved in each cache by estimating the popularity of UAVs. However, content discrimination necessitates direct access to private UAV information, which is not feasible. FL is a match made in heaven for content popularity prediction since it allows for local model training, respecting user data privacy. For example, an Augmented Reality (AR) application needs access to users’ privacy-sensitive data to collect popular augmentation elements. Because this task is a binary classification problem, an ANN algorithm may be utilized in a federated manner to learn these popular pieces before storing them locally to save latency.
- Delivery Services: Traditional cloud-based facial recognition algorithms for receiver location and identification in UAV delivery services have several cost, latency, and dependability issues. The authors of [134] presented Fed-UAV, i.e., the edge-based FL framework to handle the person re-identification problem in the UAV delivery service. The framework allows the UAV to detect the target receivers rapidly and effectively decrease data transfer between the UAV and the cloud server, resulting in faster reaction times and data privacy protection. Experiments on three real-world datasets are undertaken, and the results indicate that Fed-UAV achieved high accuracy and efficiency in human re-identification while maintaining data privacy. The UAV primarily employs face recognition to determine the receiver’s identification [135,136]. On the other hand, facial recognition requires high-quality facial photos, which are difficult to produce in a complicated situation such as an outdoor and busy location for UAV delivery.
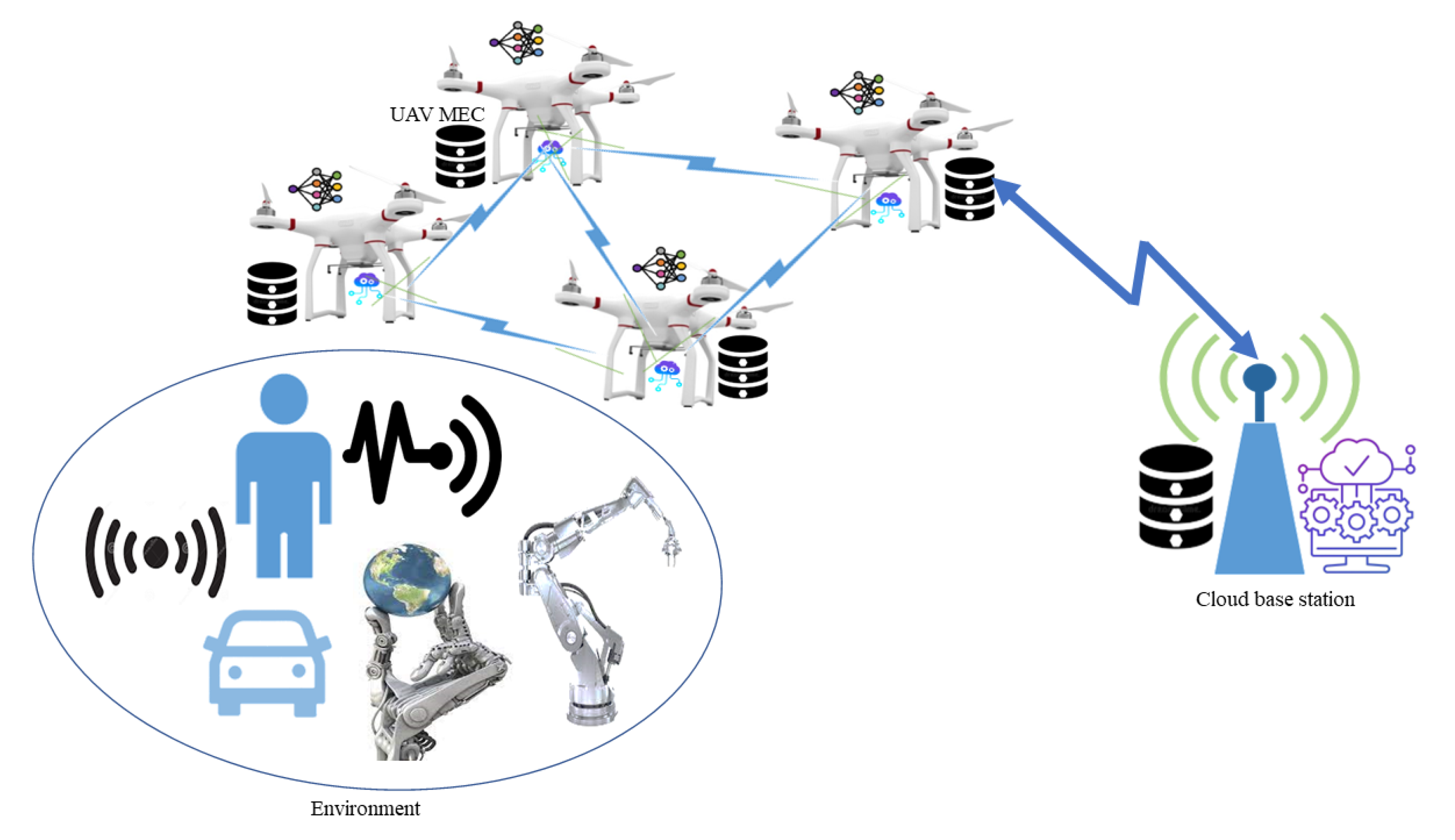
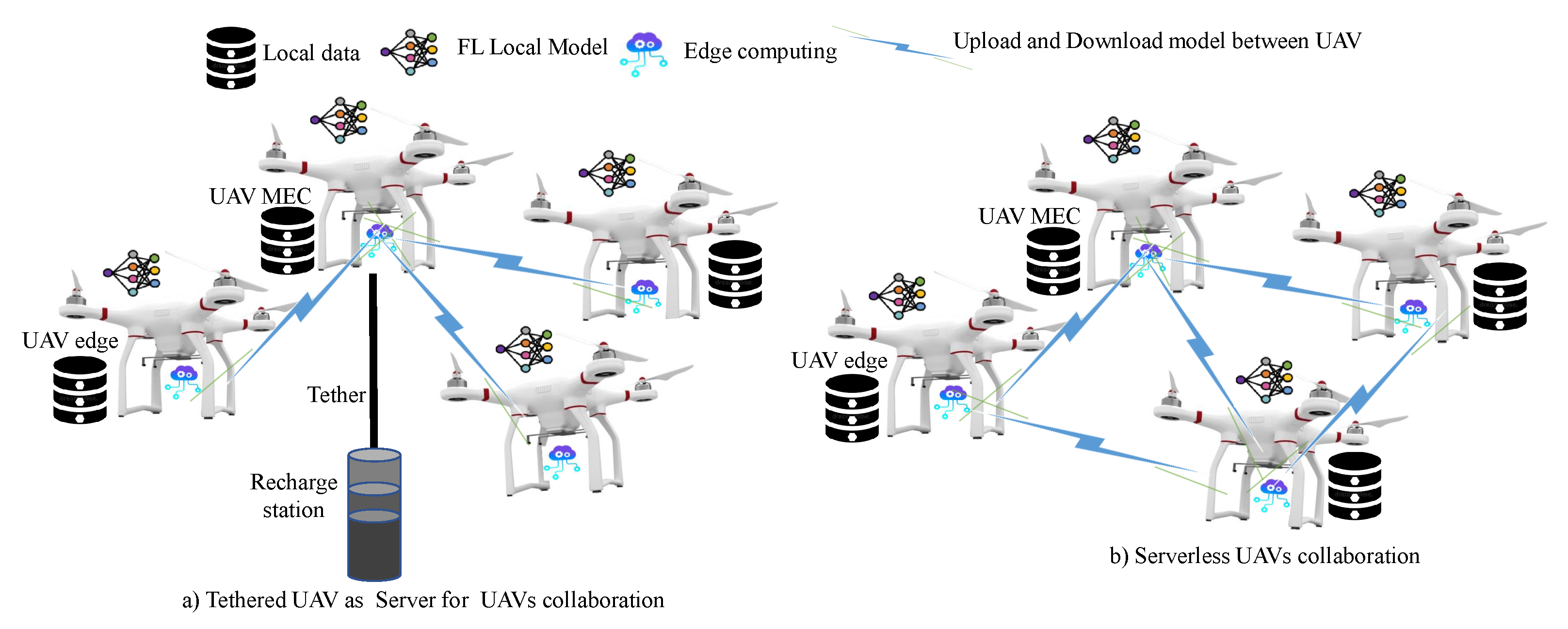
5. Collaboration of Multi-UAV Computing
6. Applications of UAV Computing
6.1. Industry 4.0
6.2. Agriculture
6.3. Healthcare
6.4. Natural Disaster
6.5. Surveillance
6.6. Smart Environments
6.7. B5G Networks
6.8. Industry 5.0
7. Challenges and Opportunities
7.1. Privacy and Security
7.2. FL Scalability
7.3. Energy Efficiency
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xie, C.; Yu, B.; Zeng, Z.; Yang, Y.; Liu, Q. Multilayer internet-of-things middleware based on knowledge graph. IEEE Internet Things J. 2020, 8, 2635–2648. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Al-Dois, H.; Ben Othman, S.; Hassan, J.; Hawbani, A.; Sahal, R.; Lee, B.; Saleh, H. Machine learning for smart environments in B5G networks: Connectivity and QoS. Comput. Intell. Neurosci. 2021, 2021. [Google Scholar] [CrossRef] [PubMed]
- She, C.; Sun, C.; Gu, Z.; Li, Y.; Yang, C.; Poor, H.V.; Vucetic, B. A Tutorial of Ultra-Reliable and Low-Latency Communications in 6G: Integrating Theoretical Knowledge into Deep Learning. arXiv 2020, arXiv:2009.06010. [Google Scholar]
- Yu, J.J.; Zhao, M.; Li, W.T.; Liu, D.; Yao, S.; Feng, W. Joint offloading and resource allocation for time-sensitive multi-access edge computing network. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Yu, J.J.; Wangt, H.; Zhao, M.; Li, W.T.; Bao, H.Q.; Yin, L.; Wu, M. Energy minimization for mobile edge computing networks with time-sensitive constraints. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Dao, N.N.; Pham, Q.V.; Tu, N.H.; Thanh, T.T.; Bao, V.N.Q.; Lakew, D.S.; Cho, S. Survey on aerial radio access networks: Toward a comprehensive 6G access infrastructure. IEEE Commun. Surv. Tutorials 2021, 23, 1193–1225. [Google Scholar] [CrossRef]
- De Alwis, C.; Kalla, A.; Pham, Q.V.; Kumar, P.; Dev, K.; Hwang, W.J.; Liyanage, M. Survey on 6G frontiers: Trends, applications, requirements, technologies and future research. IEEE Open J. Commun. Soc. 2021, 2, 836–886. [Google Scholar] [CrossRef]
- Xu, L.; Chen, M.; Chen, M.; Yang, Z.; Chaccour, C.; Saad, W.; Hong, C.S. Joint location, bandwidth and power optimization for THz-enabled UAV communications. IEEE Commun. Lett. 2021, 25, 1984–1988. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Ma, O.; Ansari, M.S.; Angelides, M.C. Performance optimization of tethered balloon technology for public safety and emergency communications. Telecommun. Syst. 2020, 75, 235–244. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ansari, M.S.; Rajput, N.S. Disaster coverage predication for the emerging tethered balloon technology: Capability for preparedness, detection, mitigation, and response. Disaster Med. Public Health Prep. 2018, 12, 222–231. [Google Scholar] [CrossRef]
- Hu, Q.; Cai, Y.; Yu, G.; Qin, Z.; Zhao, M.; Li, G.Y. Joint offloading and trajectory design for UAV-enabled mobile edge computing systems. IEEE Internet Things J. 2018, 6, 1879–1892. [Google Scholar] [CrossRef]
- Hu, X.; Wong, K.K.; Yang, K.; Zheng, Z. UAV-assisted relaying and edge computing: Scheduling and trajectory optimization. IEEE Trans. Wirel. Commun. 2019, 18, 4738–4752. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, Y.; Hu, R.Q.; Qian, Y. Computation rate maximization in UAV-enabled wireless-powered mobile-edge computing systems. IEEE J. Sel. Areas Commun. 2018, 36, 1927–1941. [Google Scholar] [CrossRef] [Green Version]
- Xiong, J.; Guo, H.; Liu, J. Task offloading in UAV-aided edge computing: Bit allocation and trajectory optimization. IEEE Commun. Lett. 2019, 23, 538–541. [Google Scholar] [CrossRef]
- Jeong, S.; Simeone, O.; Kang, J. Mobile edge computing via a UAV-mounted cloudlet: Optimization of bit allocation and path planning. IEEE Trans. Veh. Technol. 2017, 67, 2049–2063. [Google Scholar] [CrossRef] [Green Version]
- Zhan, C.; Hu, H.; Sui, X.; Liu, Z.; Niyato, D. Completion time and energy optimization in the UAV-enabled mobile-edge computing system. IEEE Internet Things J. 2020, 7, 7808–7822. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J. UAV-enhanced intelligent offloading for Internet of Things at the edge. IEEE Trans. Ind. Inform. 2019, 16, 2737–2746. [Google Scholar] [CrossRef]
- Liu, Y.; Xiong, K.; Ni, Q.; Fan, P.; Letaief, K.B. UAV-assisted wireless powered cooperative mobile edge computing: Joint offloading, CPU control, and trajectory optimization. IEEE Internet Things J. 2019, 7, 2777–2790. [Google Scholar] [CrossRef]
- Yu, Z.; Gong, Y.; Gong, S.; Guo, Y. Joint task offloading and resource allocation in UAV-enabled mobile edge computing. IEEE Internet Things J. 2020, 7, 3147–3159. [Google Scholar] [CrossRef]
- Almalki, F.; Alsamhi, S.H.; Sahal, R.; Hassan, J.; Hawbani, A.; Rajput, N.; Saif, A.; Morgan, J.; Breslin, J. Green IoT for eco-friendly and sustainable smart cities: Future directions and opportunities. Mob. Netw. Appl. 2021, 2021, 1–25. [Google Scholar] [CrossRef]
- Khaleefa, S.; Alsamhi, S.; Rajput, N. Tethered balloon technology for telecommunication, coverage and path loss. In Proceedings of the 2014 IEEE Students’ Conference on Electrical, Electronics and Computer Science, Bhopal, India, 1–2 March 2014; pp. 1–4. [Google Scholar]
- Alsamhi, S.; Ma, O.; Ansari, M. Artificial intelligence-based techniques for emerging robotics communication: A survey and future perspectives. arXiv 2018, arXiv:1804.09671. [Google Scholar]
- Li, L.; Wen, X.; Lu, Z.; Pan, Q.; Jing, W.; Hu, Z. Energy-efficient uav-enabled mec system: Bits allocation optimization and trajectory design. Sensors 2019, 19, 4521. [Google Scholar] [CrossRef] [Green Version]
- Brik, B.; Ksentini, A.; Bouaziz, M. Federated learning for UAVs-enabled wireless networks: Use cases, challenges, and open problems. IEEE Access 2020, 8, 53841–53849. [Google Scholar] [CrossRef]
- Konečný, J.; McMahan, H.B.; Ramage, D.; Richtárik, P. Federated optimization: Distributed machine learning for on-device intelligence. arXiv 2016, arXiv:1610.02527. [Google Scholar]
- Konečný, J.; McMahan, H.B.; Yu, F.X.; Richtárik, P.; Suresh, A.T.; Bacon, D. Federated learning: Strategies for improving communication efficiency. arXiv 2016, arXiv:1610.05492. [Google Scholar]
- Kang, J.; Xiong, Z.; Niyato, D.; Xie, S.; Zhang, J. Incentive mechanism for reliable federated learning: A joint optimization approach to combining reputation and contract theory. IEEE Internet Things J. 2019, 6, 10700–10714. [Google Scholar] [CrossRef]
- Ren, J.; Wang, H.; Hou, T.; Zheng, S.; Tang, C. Federated learning-based computation offloading optimization in edge computing-supported internet of things. IEEE Access 2019, 7, 69194–69201. [Google Scholar] [CrossRef]
- Samarakoon, S.; Bennis, M.; Saad, W.; Debbah, M. Distributed federated learning for ultra-reliable low-latency vehicular communications. IEEE Trans. Commun. 2019, 68, 1146–1159. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Tuor, T.; Salonidis, T.; Leung, K.K.; Makaya, C.; He, T.; Chan, K. Adaptive federated learning in resource constrained edge computing systems. IEEE J. Sel. Areas Commun. 2019, 37, 1205–1221. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.H.; Liu, Z.; Quek, T.Q.; Poor, H.V. Scheduling policies for federated learning in wireless networks. IEEE Trans. Commun. 2019, 68, 317–333. [Google Scholar] [CrossRef] [Green Version]
- Abrar, M.; Ajmal, U.; Almohaimeed, Z.M.; Gui, X.; Akram, R.; Masroor, R. Energy efficient UAV-enabled mobile edge computing for IoT devices: A review. IEEE Access 2021, 9, 127779–127798. [Google Scholar] [CrossRef]
- Yazid, Y.; Ez-Zazi, I.; Guerrero-González, A.; El Oualkadi, A.; Arioua, M. UAV-enabled mobile edge-computing for IoT based on AI: A comprehensive review. Drones 2021, 5, 148. [Google Scholar] [CrossRef]
- Huda, S.A.; Moh, S. Survey on computation offloading in UAV-Enabled mobile edge computing. J. Netw. Comput. Appl. 2022, 201, 103341. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A survey on machine-learning techniques for UAV-based communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McEnroe, P.; Wang, S.; Liyanage, M. A Survey on the Convergence of Edge Computing and AI for UAVs: Opportunities and Challenges. IEEE Internet Things J. 2022; early access. [Google Scholar] [CrossRef]
- Lahmeri, M.A.; Kishk, M.A.; Alouini, M.S. Artificial intelligence for UAV-enabled wireless networks: A survey. IEEE Open J. Commun. Soc. 2021, 2, 1015–1040. [Google Scholar] [CrossRef]
- Fourati, F.; Alsamhi, S.H.; Alouini, M.S. Bridging the Urban-Rural Connectivity Gap through Intelligent Space, Air, and Ground Networks. arXiv 2022, arXiv:2202.12683. [Google Scholar]
- Tun, Y.K.; Park, Y.M.; Tran, N.H.; Saad, W.; Pandey, S.R.; Hong, C.S. Energy-efficient resource management in UAV-assisted mobile edge computing. IEEE Commun. Lett. 2020, 25, 249–253. [Google Scholar] [CrossRef]
- Samad, T.; Bay, J.S.; Godbole, D. Network-centric systems for military operations in urban terrain: The role of UAVs. Proc. IEEE 2007, 95, 92–107. [Google Scholar] [CrossRef]
- Cheng, N.; Xu, W.; Shi, W.; Zhou, Y.; Lu, N.; Zhou, H.; Shen, X. Air-ground integrated mobile edge networks: Architecture, challenges, and opportunities. IEEE Commun. Mag. 2018, 56, 26–32. [Google Scholar] [CrossRef] [Green Version]
- Lim, W.Y.B.; Luong, N.C.; Hoang, D.T.; Jiao, Y.; Liang, Y.C.; Yang, Q.; Niyato, D.; Miao, C. Federated learning in mobile edge networks: A comprehensive survey. IEEE Commun. Surv. Tutorials 2020, 22, 2031–2063. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, D.C.; Ding, M.; Pathirana, P.N.; Seneviratne, A.; Li, J.; Poor, H.V. Federated learning for internet of things: A comprehensive survey. arXiv 2021, arXiv:2104.07914. [Google Scholar] [CrossRef]
- Nguyen, D.C.; Pham, Q.V.; Pathirana, P.N.; Ding, M.; Seneviratne, A.; Lin, Z.; Dobre, O.; Hwang, W.J. Federated Learning for Smart Healthcare: A Survey. ACM Comput. Surv. (CSUR) 2022, 55, 1–37. [Google Scholar] [CrossRef]
- Rahman, S.A.; Tout, H.; Talhi, C.; Mourad, A. Internet of things intrusion detection: Centralized, on-device, or federated learning? IEEE Netw. 2020, 34, 310–317. [Google Scholar] [CrossRef]
- Liu, Y.; Garg, S.; Nie, J.; Zhang, Y.; Xiong, Z.; Kang, J.; Hossain, M.S. Deep anomaly detection for time-series data in industrial IoT: A communication-efficient on-device federated learning approach. IEEE Internet Things J. 2020, 8, 6348–6358. [Google Scholar] [CrossRef]
- Tong, Y.; Sun, W. The role of film and television big data in real-time image detection and processing in the Internet of Things era. J. Real-Time Image Process. 2021, 18, 1115–1127. [Google Scholar] [CrossRef]
- Dean, J.; Corrado, G.; Monga, R.; Chen, K.; Devin, M.; Mao, M.; Ranzato, M.; Senior, A.; Tucker, P.; Yang, K. Large scale distributed deep networks. Adv. Neural Inf. Process. Syst. 2012, 25. Available online: https://www.cs.toronto.edu/~ranzato/publications/DistBeliefNIPS2012_withAppendix.pdf (accessed on 28 May 2022).
- Smith, V.; Chiang, C.K.; Sanjabi, M.; Talwalkar, A.S. Federated multi-task learning. Adv. Neural Inf. Process. Syst. 2017, 30. Available online: https://proceedings.neurips.cc/paper/2017/file/6211080fa89981f66b1a0c9d55c61d0f-Paper.pdf (accessed on 28 May 2022).
- Ji, S.; Pan, S.; Long, G.; Li, X.; Jiang, J.; Huang, Z. Learning private neural language modeling with attentive aggregation. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–8. [Google Scholar]
- Wang, G.; Dang, C.X.; Zhou, Z. Measure contribution of participants in federated learning. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 2597–2604. [Google Scholar]
- Bonawitz, K.; Ivanov, V.; Kreuter, B.; Marcedone, A.; McMahan, H.B.; Patel, S.; Ramage, D.; Segal, A.; Seth, K. Practical secure aggregation for privacy-preserving machine learning. In Proceedings of the 2017 ACM SIGSAC Conference on Computer and Communications Security, Dallas, TX, USA, 30 October–3 November 2017; pp. 1175–1191. [Google Scholar]
- Tian, Y.; Yuan, J.; Song, H. Efficient privacy-preserving authentication framework for edge-assisted Internet of Drones. J. Inf. Secur. Appl. 2019, 48, 102354. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Guizani, M.; Hawbani, A.; Shvetsor, A.V.; Afghah, F.; Song, H.; Lee, B. Drones’ Edge Intelligence over Smart Environments in B5G: Blockchain and Federated Learning Synergy. IEEE Trans. Green Commun. Netw. 2022, 2022, 295–312. [Google Scholar] [CrossRef]
- Shaheen, M.; Farooq, M.S.; Umer, T.; Kim, B.S. Applications of Federated Learning; Taxonomy, Challenges, and Research Trends. Electronics 2022, 11, 670. [Google Scholar] [CrossRef]
- Feng, S.; Niyato, D.; Wang, P.; Kim, D.I.; Liang, Y.C. Joint service pricing and cooperative relay communication for federated learning. In Proceedings of the 2019 International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Atlanta, GA, USA, 14–17 July 2019; pp. 815–820. [Google Scholar]
- Zhan, Y.; Li, P.; Qu, Z.; Zeng, D.; Guo, S. A learning-based incentive mechanism for federated learning. IEEE Internet Things J. 2020, 7, 6360–6368. [Google Scholar] [CrossRef]
- McMahan, B.; Moore, E.; Ramage, D.; Hampson, S.; y Arcas, B.A. Communication-efficient learning of deep networks from decentralized data. In Artificial Intelligence and Statistics; PMLR: Fort Lauderdale, FL, USA, 2017; pp. 1273–1282. [Google Scholar]
- Kang, J.; Xiong, Z.; Niyato, D.; Zou, Y.; Zhang, Y.; Guizani, M. Reliable federated learning for mobile networks. IEEE Wirel. Commun. 2020, 27, 72–80. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Glicksberg, B.S.; Su, C.; Walker, P.; Bian, J.; Wang, F. Federated learning for healthcare informatics. J. Healthc. Inform. Res. 2021, 5, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Zhao, J.; Jiang, L.; Tan, R.; Niyato, D. Mobile Edge Computing, Blockchain and Reputation-Based Crowdsourcing Iot Federated Learning: A Secure, Decentralized and Privacy-Preserving System. 2020. Available online: https://www.semanticscholar.org/paper/Mobile-Edge-Computing%2C-Blockchain-and-Crowdsourcing-Zhao-Zhao/7c7ccf8defa9c61eb2487af1249974b3f1213957 (accessed on 28 May 2022).
- Samarakoon, S.; Bennis, M.; Saad, W.; Debbah, M. Federated learning for ultra-reliable low-latency V2V communications. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar]
- Yang, M.D.; Boubin, J.G.; Tsai, H.P.; Tseng, H.H.; Hsu, Y.C.; Stewart, C.C. Adaptive autonomous UAV scouting for rice lodging assessment using edge computing with deep learning EDANet. Comput. Electron. Agric. 2020, 179, 105817. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, M.; Saad, W.; Hong, C.S.; Shikh-Bahaei, M. Energy efficient federated learning over wireless communication networks. IEEE Trans. Wirel. Commun. 2020, 20, 1935–1949. [Google Scholar] [CrossRef]
- Zhang, T.; Mao, S. Energy-Efficient Federated Learning with Intelligent Reflecting Surface. IEEE Trans. Green Commun. Netw. 2021, 6, 845–858. [Google Scholar] [CrossRef]
- Mach, P.; Becvar, Z. Mobile edge computing: A survey on architecture and computation offloading. IEEE Commun. Surv. Tutorials 2017, 19, 1628–1656. [Google Scholar] [CrossRef] [Green Version]
- Li, W.T.; Zhao, M.; Wu, Y.H.; Yu, J.J.; Bao, L.Y.; Yang, H.; Liu, D. Collaborative offloading for UAV-enabled time-sensitive MEC networks. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 1–17. [Google Scholar] [CrossRef]
- Wang, G.; Yu, X.; Xu, F.; Cai, J. Task offloading and resource allocation for UAV-assisted mobile edge computing with imperfect channel estimation over Rician fading channels. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 1–19. [Google Scholar] [CrossRef]
- Li, J.; Liu, Q.; Wu, P.; Shu, F.; Jin, S. Task offloading for UAV-based mobile edge computing via deep reinforcement learning. In Proceedings of the 2018 IEEE/CIC International Conference on Communications in China (ICCC), Beijing, China, 16–18 August 2018; pp. 798–802. [Google Scholar]
- Ouyang, W.; Chen, Z.; Wu, J.; Yu, G.; Zhang, H. Dynamic Task Migration Combining Energy Efficiency and Load Balancing Optimization in Three-Tier UAV-Enabled Mobile Edge Computing System. Electronics 2021, 10, 190. [Google Scholar] [CrossRef]
- Messous, M.A.; Arfaoui, A.; Alioua, A.; Senouci, S.M. A sequential game approach for computation-offloading in an UAV network. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–7. [Google Scholar]
- Sedjelmaci, H.; Boudguiga, A.; Jemaa, I.B.; Senouci, S.M. An efficient cyber defense framework for UAV-Edge computing network. Ad Hoc Netw. 2019, 94, 101970. [Google Scholar] [CrossRef]
- Zhou, Y.; Pan, C.; Yeoh, P.L.; Wang, K.; Elkashlan, M.; Vucetic, B.; Li, Y. Secure communications for UAV-enabled mobile edge computing systems. IEEE Trans. Commun. 2019, 68, 376–388. [Google Scholar] [CrossRef] [Green Version]
- Ren, Y.; Xie, Z.; Ding, Z.; Sun, X.; Xia, J.; Tian, Y. Computation offloading game in multiple unmanned aerial vehicle-enabled mobile edge computing networks. IET Commun. 2021, 15, 1392–1401. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, Y.; Sun, H.; Chu, Z. UAV-enabled mobile edge computing: Offloading optimization and trajectory design. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Motlagh, N.H.; Taleb, T.; Arouk, O. Low-altitude unmanned aerial vehicles-based internet of things services: Comprehensive survey and future perspectives. IEEE Internet Things J. 2016, 3, 899–922. [Google Scholar] [CrossRef]
- Xu, J.; Liu, X.; Li, X.; Zhang, L.; Jin, J.; Yang, Y. Energy aware Computation Management Strategy for Smart Logistic System with MEC. IEEE Internet Things J. 2021, 9, 8544–8559. [Google Scholar] [CrossRef]
- Chen, J.; Chen, S.; Luo, S.; Wang, Q.; Cao, B.; Li, X. An intelligent task offloading algorithm (iTOA) for UAV edge computing network. Digit. Commun. Netw. 2020, 6, 433–443. [Google Scholar] [CrossRef]
- Diao, X.; Zheng, J.; Cai, Y.; Wu, Y.; Anpalagan, A. Fair data allocation and trajectory optimization for UAV-assisted mobile edge computing. IEEE Commun. Lett. 2019, 23, 2357–2361. [Google Scholar] [CrossRef]
- Zhang, W.; Li, L.; Zhang, N.; Han, T.; Wang, S. Air-ground integrated mobile edge networks: A survey. IEEE Access 2020, 8, 125998–126018. [Google Scholar] [CrossRef]
- Shang, B.; Liu, L. Mobile-edge computing in the sky: Energy optimization for air–ground integrated networks. IEEE Internet Things J. 2020, 7, 7443–7456. [Google Scholar] [CrossRef]
- Narang, M.; Xiang, S.; Liu, W.; Gutierrez, J.; Chiaraviglio, L.; Sathiaseelan, A.; Merwaday, A. UAV-assisted edge infrastructure for challenged networks. In Proceedings of the 2017 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Atlanta, GA, USA, 1–4 May 2017; pp. 60–65. [Google Scholar]
- Alsamhi, S.H.; Almalki, F.A.; AL-Dois, H.; Shvetsov, A.V.; Ansari, M.S.; Hawbani, A.; Gupta, S.K.; Lee, B. Multi-drone edge intelligence and SAR smart wearable devices for emergency communication. Wirel. Commun. Mob. Comput. 2021, 2021, 1–12. [Google Scholar] [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Alsamhi, S.H.; Hawbani, A. Multi-UAV and SAR collaboration model for disaster management in B5G networks. Internet Technol. Lett. 2021, e310. [Google Scholar] [CrossRef]
- Zhang, T.; Xu, Y.; Loo, J.; Yang, D.; Xiao, L. Joint computation and communication design for UAV-assisted mobile edge computing in IoT. IEEE Trans. Ind. Inform. 2019, 16, 5505–5516. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Gao, L.; Huang, J. Multi-cap optimization for wireless data plans with time flexibility. IEEE Trans. Mob. Comput. 2019, 19, 2145–2159. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Feng, J.; Gu, B.; Ai, B.; Mumtaz, S.; Rodriguez, J.; Guizani, M. When mobile crowd sensing meets UAV: Energy-efficient task assignment and route planning. IEEE Trans. Commun. 2018, 66, 5526–5538. [Google Scholar] [CrossRef]
- Zhou, Z.; Liu, P.; Feng, J.; Zhang, Y.; Mumtaz, S.; Rodriguez, J. Computation resource allocation and task assignment optimization in vehicular fog computing: A contract-matching approach. IEEE Trans. Veh. Technol. 2019, 68, 3113–3125. [Google Scholar] [CrossRef]
- Nie, Y.; Zhao, J.; Gao, F.; Yu, F.R. Semi-Distributed Resource Management in UAV-Aided MEC Systems: A Multi-Agent Federated Reinforcement Learning Approach. IEEE Trans. Veh. Technol. 2021, 70, 13162–13173. [Google Scholar] [CrossRef]
- Wang, X.; Han, Y.; Leung, V.C.; Niyato, D.; Yan, X.; Chen, X. Convergence of edge computing and deep learning: A comprehensive survey. IEEE Commun. Surv. Tutorials 2020, 22, 869–904. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Ke, H.; Sun, W. Unmanned-aerial-vehicle-assisted computation offloading for mobile edge computing based on deep reinforcement learning. IEEE Access 2020, 8, 180784–180798. [Google Scholar] [CrossRef]
- Liu, Q.; Shi, L.; Sun, L.; Li, J.; Ding, M.; Shu, F. Path planning for UAV-mounted mobile edge computing with deep reinforcement learning. IEEE Trans. Veh. Technol. 2020, 69, 5723–5728. [Google Scholar] [CrossRef] [Green Version]
- Gupta, A.; Sundhan, S.; Gupta, S.K.; Alsamhi, S.; Rashid, M. Collaboration of UAV and HetNet for better QoS: A comparative study. Int. J. Veh. Inf. Commun. Syst. 2020, 5, 309–333. [Google Scholar] [CrossRef]
- Alsamhi, S.; Rajput, N. Methodology for coexistence of high altitude platform ground stations and radio relay stations with reduced interference. Int. J. Sci. Eng. Res. 2012, 3, 1–7. [Google Scholar]
- Alsamhi, S.H.; Rajput, N. HAP antenna radiation pattern for providing coverage and service characteristics. In Proceedings of the 2014 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Delhi, India, 24–27 September 2014; pp. 1434–1439. [Google Scholar]
- Alsamhi, S.H.; Rajput, N. An efficient channel reservation technique for improved QoS for mobile communication deployment using high altitude platform. Wirel. Pers. Commun. 2016, 91, 1095–1108. [Google Scholar] [CrossRef]
- Chang, H.; Chen, Y.; Zhang, B.; Doermann, D. Multi-uav mobile edge computing and path planning platform based on reinforcement learning. IEEE Trans. Emerg. Top. Comput. Intell. 2021, 6, 489–498. [Google Scholar] [CrossRef]
- Alsamhi, S.; Ma, O.; Ansari, M. Predictive estimation of the optimal signal strength from unmanned aerial vehicle over internet of things using ANN. arXiv 2018, arXiv:1805.07614. [Google Scholar]
- Alsamhi, S.H.; Almalki, F.; Ma, O.; Ansari, M.S.; Lee, B. Predictive estimation of optimal signal strength from drones over IoT frameworks in smart cities. IEEE Trans. Mob. Comput. 2021. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, S.; Zhang, Y. Cooperative offloading and resource management for UAV-enabled mobile edge computing in power IoT system. IEEE Trans. Veh. Technol. 2020, 69, 12229–12239. [Google Scholar] [CrossRef]
- Jiang, F.; Wang, K.; Dong, L.; Pan, C.; Xu, W.; Yang, K. Deep-learning-based joint resource scheduling algorithms for hybrid MEC networks. IEEE Internet Things J. 2019, 7, 6252–6265. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Chen, M.; Liu, X.; Liu, Y.; Chen, Y.; Cui, S.; Poor, H.V. AI-Driven UAV-NOMA-MEC in Next Generation Wireless Networks. IEEE Wirel. Commun. 2021, 28, 66–73. [Google Scholar] [CrossRef]
- Ullah, Z.; Al-Turjman, F.; Moatasim, U.; Mostarda, L.; Gagliardi, R. UAVs joint optimization problems and machine learning to improve the 5G and Beyond communication. Comput. Netw. 2020, 182, 107478. [Google Scholar] [CrossRef]
- Yu, S.; Wang, X.; Langar, R. Computation offloading for mobile edge computing: A deep learning approach. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar]
- Chen, L.; Zhao, R.; He, K.; Zhao, Z.; Fan, L. Intelligent ubiquitous computing for future UAV-enabled MEC network systems. Clust. Comput. 2021, 1–11. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, G.; Ma, S.; Yang, K.; Wang, K. Efficient multitask scheduling for completion time minimization in UAV-assisted mobile edge computing. Mob. Inf. Syst. 2020, 2020. [Google Scholar] [CrossRef]
- Diao, X.; Zheng, J.; Wu, Y.; Cai, Y.; Anpalagan, A. Joint trajectory design, task data, and computing resource allocations for NOMA-based and UAV-assisted mobile edge computing. IEEE Access 2019, 7, 117448–117459. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory design and power control for multi-UAV assisted wireless networks: A machine learning approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Yin, C.; Liu, X. Machine Learning Based Joint Offloading and Trajectory Design in UAV Based MEC System for IoT Devices. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; pp. 902–909. [Google Scholar]
- Grasso, C.; Raftopoulos, R.; Schembra, G. Deep Q-Learning for Job Offloading Orchestration in a Fleet of MEC UAVs in 5G Environments. In Proceedings of the 2021 IEEE 7th International Conference on Network Softwarization (NetSoft), Tokyo, Japan, 28 June–2 July 2021; pp. 186–190. [Google Scholar]
- Mehta, P.; Gupta, R.; Tanwar, S. Blockchain envisioned UAV networks: Challenges, solutions, and comparisons. Comput. Commun. 2020, 151, 518–538. [Google Scholar] [CrossRef]
- Chen, M.; Poor, H.V.; Saad, W.; Cui, S. Wireless communications for collaborative federated learning. IEEE Commun. Mag. 2020, 58, 48–54. [Google Scholar] [CrossRef]
- Pinyoanuntapong, P.; Janakaraj, P.; Wang, P.; Lee, M.; Chen, C. Fedair: Towards multi-hop federated learning over-the-air. In Proceedings of the 2020 IEEE 21st International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Atlanta, GA, USA, 26–29 May 2020; pp. 1–5. [Google Scholar]
- Hosseinalipour, S.; Brinton, C.G.; Aggarwal, V.; Dai, H.; Chiang, M. From federated to fog learning: Distributed machine learning over heterogeneous wireless networks. IEEE Commun. Mag. 2020, 58, 41–47. [Google Scholar] [CrossRef]
- Zeng, T.; Semiari, O.; Mozaffari, M.; Chen, M.; Saad, W.; Bennis, M. Federated learning in the sky: Joint power allocation and scheduling with UAV swarms. In Proceedings of the ICC 2020–2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Tang, Z.; Shi, S.; Chu, X. Communication-efficient decentralized learning with sparsification and adaptive peer selection. In Proceedings of the 2020 IEEE 40th International Conference on Distributed Computing Systems (ICDCS), 29 November–1 December 2020; pp. 1207–1208. [Google Scholar]
- Nedic, A.; Ozdaglar, A. Distributed subgradient methods for multi-agent optimization. IEEE Trans. Autom. Control 2009, 54, 48–61. [Google Scholar] [CrossRef]
- Qu, Y.; Dai, H.; Zhuang, Y.; Chen, J.; Dong, C.; Wu, F.; Guo, S. Decentralized Federated Learning for UAV Networks: Architecture, Challenges, and Opportunities. IEEE Netw. 2021, 35, 156–162. [Google Scholar] [CrossRef]
- Zhang, Z.; Ma, S.; Yang, Z.; Xiong, Z.; Kang, J.; Wu, Y.; Zhang, K.; Niyato, D. Robust Semi-supervised Federated Learning for Images Automatic Recognition in Internet of Drones. arXiv 2022, arXiv:2201.01230. [Google Scholar] [CrossRef]
- Feng, W.; Zhao, N.; Ao, S.; Tang, J.; Zhang, X.; Fu, Y.; So, D.K.; Wong, K.K. Joint 3D trajectory design and time allocation for UAV-enabled wireless power transfer networks. IEEE Trans. Veh. Technol. 2020, 69, 9265–9278. [Google Scholar] [CrossRef] [Green Version]
- Xie, L.; Xu, J.; Zeng, Y. Common throughput maximization for UAV-enabled interference channel with wireless powered communications. IEEE Trans. Commun. 2020, 68, 3197–3212. [Google Scholar] [CrossRef] [Green Version]
- Yuan, X.; Yang, T.; Hu, Y.; Xu, J.; Schmeink, A. Trajectory design for UAV-enabled multiuser wireless power transfer with nonlinear energy harvesting. IEEE Trans. Wirel. Commun. 2020, 20, 1105–1121. [Google Scholar] [CrossRef]
- Hamdi, R.; Chen, M.; Said, A.B.; Qaraqe, M.; Poor, H.V. Federated Learning Over Energy Harvesting Wireless Networks. IEEE Internet Things J. 2021, 9, 92–103. [Google Scholar] [CrossRef]
- Do, Q.V.; Pham, Q.V.; Hwang, W.J. Deep Reinforcement Learning for Energy-Efficient Federated Learning in UAV-Enabled Wireless Powered Networks. IEEE Commun. Lett. 2021, 26, 99–103. [Google Scholar] [CrossRef]
- Pham, Q.V.; Le, M.; Huynh-The, T.; Han, Z.; Hwang, W.J. Energy-Efficient Federated Learning over UAV-Enabled Wireless Powered Communications. IEEE Trans. Veh. Technol. 2022, 71, 4977–4990. [Google Scholar] [CrossRef]
- Zhang, H.; Hanzo, L. Federated learning assisted multi-UAV networks. IEEE Trans. Veh. Technol. 2020, 69, 14104–14109. [Google Scholar] [CrossRef]
- Pokhrel, S.R. Federated Learning Meets Blockchain at 6G Edge: A Drone-Assisted Networking for Disaster Response. In Proceedings of the 2nd ACM MobiCom Workshop on Drone Assisted Wireless Communications for 5G and Beyond, London, UK, 25 September 2020; pp. 49–54. [Google Scholar]
- Pang, X.; Sheng, M.; Zhao, N.; Tang, J.; Niyato, D.; Wong, K.K. When UAV meets IRS: Expanding air-ground networks via passive reflection. IEEE Wirel. Commun. 2021, 28, 164–170. [Google Scholar] [CrossRef]
- Lu, W.; Ding, Y.; Gao, Y.; Hu, S.; Wu, Y.; Zhao, N.; Gong, Y. Resource and Trajectory Optimization for Secure Communications in Dual Unmanned Aerial Vehicle Mobile Edge Computing Systems. IEEE Trans. Ind. Inform. 2021, 18, 2704–2713. [Google Scholar] [CrossRef]
- Shang, B.; Shafin, R.; Liu, L. UAV Swarm-Enabled Aerial Reconfigurable Intelligent Surface (SARIS). IEEE Wirel. Commun. 2021, 28, 156–163. [Google Scholar] [CrossRef]
- Lim, W.Y.B.; Huang, J.; Xiong, Z.; Kang, J.; Niyato, D.; Hua, X.S.; Leung, C.; Miao, C. Towards federated learning in uav-enabled internet of vehicles: A multi-dimensional contract-matching approach. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5140–5154. [Google Scholar] [CrossRef]
- Chen, M.; Mozaffari, M.; Saad, W.; Yin, C.; Debbah, M.; Hong, C.S. Caching in the sky: Proactive deployment of cache-enabled unmanned aerial vehicles for optimized quality-of-experience. IEEE J. Sel. Areas Commun. 2017, 35, 1046–1061. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, X.; Xu, J.; Chen, T.; Li, G.; Jiang, F.; Li, X. An Edge based Federated Learning Framework for Person Re-identification in UAV Delivery Service. In Proceedings of the 2021 IEEE International Conference on Web Services (ICWS), Chicago, IL, USA, 5–10 September 2021; pp. 500–505. [Google Scholar] [CrossRef]
- Li, R.; Li, X.; Xu, J.; Jiang, F.; Jia, Z.; Shao, D.; Pan, L.; Liu, X. Energy-aware decision-making for dynamic task migration in MEC-based unmanned aerial vehicle delivery system. Concurr. Comput. Pract. Exp. 2021, 33, e6092. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-based IoT platform: A crowd surveillance use case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef] [Green Version]
- Tun, Y.K.; Dang, T.N.; Kim, K.; Anselwi, M.; Saad, W.; Hong, C.S. Collaboration in the Sky: A Distributed Framework for Task Offloading and Resource Allocation in Multi-Access Edge Computing. arXiv 2021, arXiv:2107.14502. [Google Scholar] [CrossRef]
- Wang, L.; Wang, K.; Pan, C.; Xu, W.; Aslam, N.; Nallanathan, A. Deep reinforcement learning based dynamic trajectory control for UAV-assisted mobile edge computing. IEEE Trans. Mob. Comput. 2021. [Google Scholar] [CrossRef]
- Li, M.; Cheng, N.; Gao, J.; Wang, Y.; Zhao, L.; Shen, X. Energy-efficient UAV-assisted mobile edge computing: Resource allocation and trajectory optimization. IEEE Trans. Veh. Technol. 2020, 69, 3424–3438. [Google Scholar] [CrossRef]
- Ren, T.; Niu, J.; Dai, B.; Liu, X.; Hu, Z.; Xu, M.; Guizani, M. Enabling efficient scheduling in large-scale UAV-assisted mobile edge computing via hierarchical reinforcement learning. IEEE Internet Things J. 2021, 9, 7095–7109. [Google Scholar] [CrossRef]
- Chen, X.; Wu, C.; Chen, T.; Liu, Z.; Bennis, M.; Ji, Y. Age of information-aware resource management in UAV-assisted mobile-edge computing systems. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Xu, H.; Huang, W.; Zhou, Y.; Yang, D.; Li, M.; Han, Z. Edge computing resource allocation for unmanned aerial vehicle assisted mobile network with blockchain applications. IEEE Trans. Wirel. Commun. 2021, 20, 3107–3121. [Google Scholar] [CrossRef]
- Wang, L.; Wang, K.; Pan, C.; Xu, W.; Aslam, N.; Hanzo, L. Multi-agent deep reinforcement learning-based trajectory planning for multi-UAV assisted mobile edge computing. IEEE Trans. Cogn. Commun. Netw. 2020, 7, 73–84. [Google Scholar] [CrossRef]
- Ei, N.N.; Alsenwi, M.; Tun, Y.K.; Han, Z.; Hong, C.S. Energy-efficient resource allocation in multi-UAV-assisted two-stage edge computing for beyond 5G networks. IEEE Trans. Intell. Transp. Syst. 2022. [Google Scholar] [CrossRef]
- Wang, H.; Shen, Y.; Wu, S.; Wang, S. Resource Allocation and Trajectory Optimization for UAV Assisted Mobile Edge Computing Systems with Energy Harvesting. In Neural Computing for Advanced Applications; Zhang, H., Yang, Z., Zhang, Z., Wu, Z., Hao, T., Eds.; Springer: Singapore, 2021; pp. 417–431. [Google Scholar]
- Zhou, Z.; Feng, J.; Tan, L.; He, Y.; Gong, J. An air-ground integration approach for mobile edge computing in IoT. IEEE Commun. Mag. 2018, 56, 40–47. [Google Scholar] [CrossRef]
- Luo, Y.; Ding, W.; Zhang, B. Optimization of task scheduling and dynamic service strategy for multi-UAV-enabled mobile-edge computing system. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 970–984. [Google Scholar] [CrossRef]
- Tong, L.; Li, Y.; Gao, W. A hierarchical edge cloud architecture for mobile computing. In Proceedings of the IEEE INFOCOM 2016-The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar]
- Urgaonkar, R.; Wang, S.; He, T.; Zafer, M.; Chan, K.; Leung, K.K. Dynamic service migration and workload scheduling in edge-clouds. Perform. Eval. 2015, 91, 205–228. [Google Scholar] [CrossRef]
- Awada, U.; Zhang, J.; Chen, S.; Li, S. Air-to-Air Collaborative Learning: A Multi-Task Orchestration in Federated Aerial Computing. 2021 IEEE 14th International Conference on Cloud Computing (CLOUD), Chicago, IL, USA, 5–10 September 2021; pp. 671–680. [Google Scholar]
- Zhu, S.; Gui, L.; Zhao, D.; Cheng, N.; Zhang, Q.; Lang, X. Learning-based computation offloading approaches in UAVs-assisted edge computing. IEEE Trans. Veh. Technol. 2021, 70, 928–944. [Google Scholar] [CrossRef]
- Liu, Y.; Nie, J.; Li, X.; Ahmed, S.H.; Lim, W.Y.B.; Miao, C. Federated learning in the sky: Aerial-ground air quality sensing framework with UAV swarms. IEEE Internet Things J. 2020, 8, 9827–9837. [Google Scholar] [CrossRef]
- Grasso, C.; Schembra, G. A fleet of MEC UAVs to extend a 5G network slice for video monitoring with low-latency constraints. J. Sens. Actuator Netw. 2019, 8, 3. [Google Scholar] [CrossRef] [Green Version]
- Sharma, M.; Gupta, A.; Gupta, S.K.; Alsamhi, S.H.; Shvetsov, A.V. Survey on unmanned aerial vehicle for Mars exploration: Deployment use case. Drones 2021, 6, 4. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M. Convergence of machine learning and robotics communication in collaborative assembly: Mobility, connectivity and future perspectives. J. Intell. Robot. Syst. 2020, 98, 541–566. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Survey on artificial intelligence based techniques for emerging robotic communication. Telecommun. Syst. 2019, 72, 483–503. [Google Scholar] [CrossRef]
- Sharma, V.; Choudhary, G.; Ko, Y.; You, I. Behavior and vulnerability assessment of drones-enabled industrial internet of things (iiot). IEEE Access 2018, 6, 43368–43383. [Google Scholar] [CrossRef]
- Nooralishahi, P.; Ibarra-Castanedo, C.; Deane, S.; López, F.; Pant, S.; Genest, M.; Avdelidis, N.P.; Maldague, X.P. Drone-Based Non-Destructive Inspection of Industrial Sites: A Review and Case Studies. Drones 2021, 5, 106. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Gupta, S.K. Collaboration of drone and internet of public safety things in smart cities: An overview of qos and network performance optimization. Drones 2019, 3, 13. [Google Scholar] [CrossRef] [Green Version]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A comprehensive review of applications of drone technology in the mining industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Sahal, R.; Alsamhi, S.H.; Breslin, J.G.; Brown, K.N.; Ali, M.I. Digital twins collaboration for automatic erratic operational data detection in industry 4.0. Appl. Sci. 2021, 11, 3186. [Google Scholar] [CrossRef]
- Sahal, R.; Alsamhi, S.H.; Brown, K.N.; O’Shea, D.; McCarthy, C.; Guizani, M. Blockchain-empowered digital twins collaboration: Smart transportation use case. Machines 2021, 9, 193. [Google Scholar] [CrossRef]
- Sahal, R.; Alsamhi, S.H.; Brown, K.N.; O’Shea, D.; Alouffi, B. Blockchain-Based Digital Twins Collaboration for Smart Pandemic Alerting: Decentralized COVID-19 Pandemic Alerting Use Case. Comput. Intell. Neurosci. 2022, 2022, 1–14. [Google Scholar] [CrossRef]
- Sahal, R.; Alsamhi, S.H.; Breslin, J.G.; Ali, M.I. Industry 4.0 towards Forestry 4.0: Fire detection use case. Sensors 2021, 21, 694. [Google Scholar] [CrossRef]
- Kitpo, N.; Inoue, M. Early rice disease detection and position mapping system using drone and IoT architecture. In Proceedings of the 2018 12th South East Asian Technical University Consortium (SEATUC), Yogyakarta, Indonesia, 12–13 March 2018; Volume 1, pp. 1–5. [Google Scholar]
- Mazzia, V.; Comba, L.; Khaliq, A.; Chiaberge, M.; Gay, P. UAV and machine learning based refinement of a satellite-driven vegetation index for precision agriculture. Sensors 2020, 20, 2530. [Google Scholar] [CrossRef]
- Grosso, R.; Mecca, U.; Moglia, G.; Prizzon, F.; Rebaudengo, M. Collecting built environment information using UAVs: Time and applicability in building inspection activities. Sustainability 2020, 12, 4731. [Google Scholar] [CrossRef]
- Panday, U.S.; Shrestha, N.; Maharjan, S.; Pratihast, A.K.; Shrestha, K.L.; Aryal, J. Correlating the plant height of wheat with above-ground biomass and crop yield using drone imagery and crop surface model, a case study from Nepal. Drones 2020, 4, 28. [Google Scholar] [CrossRef]
- Agapiou, A. Vegetation extraction using visible-bands from openly licensed unmanned aerial vehicle imagery. Drones 2020, 4, 27. [Google Scholar] [CrossRef]
- Hentschke, M.; Pignaton de Freitas, E.; Hennig, C.H.; Girardi da Veiga, I.C. Evaluation of altitude sensors for a crop spraying drone. Drones 2018, 2, 25. [Google Scholar] [CrossRef] [Green Version]
- Chamola, V.; Hassija, V.; Gupta, V.; Guizani, M. A comprehensive review of the COVID-19 pandemic and the role of IoT, drones, AI, blockchain, and 5G in managing its impact. IEEE Access 2020, 8, 90225–90265. [Google Scholar] [CrossRef]
- Jeyabalan, V.; Nouvet, E.; Meier, P.; Donelle, L. Context-specific challenges, opportunities, and ethics of drones for healthcare delivery in the eyes of program managers and field staff: A multi-site qualitative study. Drones 2020, 4, 44. [Google Scholar] [CrossRef]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Shah, N.S.M.; Alsamhi, S.; Abdullah, Q.; Farah, N. Distributed clustering for user devices under UAV coverage area during disaster recovery. In Proceedings of the 2021 IEEE International Conference in Power Engineering Application (ICPEA), Selangor, Malaysia, 8–9 March 2021; pp. 143–148. [Google Scholar]
- Saif, A.; Dimyati, K.; Noordin, K.A.; Shah, N.S.M.; Alsamhi, S.; Abdullah, Q. Energy-efficient tethered UAV deployment in B5G for smart environments and disaster recovery. In Proceedings of the 2021 1st International Conference on Emerging Smart Technologies and Applications (eSmarTA), Sana’a, Yemen, 10–12 August 2021; pp. 1–5. [Google Scholar]
- Cowley, D.C.; Moriarty, C.; Geddes, G.; Brown, G.L.; Wade, T.; Nichol, C.J. UAVs in context: Archaeological airborne recording in a national body of survey and record. Drones 2017, 2, 2. [Google Scholar] [CrossRef] [Green Version]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Shvetsova, S.V.; Alhartomi, M.M.; Hawbani, A.; Rajput, N.S.; Srivastava, S.; Saif, A.; Nyangaresi, V.O. UAV Computing-Assisted Search and Rescue Mission Framework for Disaster and Harsh Environment Mitigation. Drones 2022, 6, 154. [Google Scholar] [CrossRef]
- Mangewa, L.J.; Ndakidemi, P.A.; Munishi, L.K. Integrating UAV technology in an ecological monitoring system for community wildlife management areas in Tanzania. Sustainability 2019, 11, 6116. [Google Scholar] [CrossRef] [Green Version]
- Rees, A.F.; Avens, L.; Ballorain, K.; Bevan, E.; Broderick, A.C.; Carthy, R.R.; Christianen, M.J.; Duclos, G.; Heithaus, M.R.; Johnston, D.W. The potential of unmanned aerial systems for sea turtle research and conservation: A review and future directions. Endanger. Species Res. 2018, 35, 81–100. [Google Scholar] [CrossRef] [Green Version]
- Salhaoui, M.; Molina-Molina, J.C.; Guerrero-González, A.; Arioua, M.; Ortiz, F.J. Autonomous underwater monitoring system for detecting life on the seabed by means of computer vision cloud services. Remote Sens. 2020, 12, 1981. [Google Scholar] [CrossRef]
- Wang, D.; Shao, Q.; Yue, H. Surveying wild animals from satellites, manned aircraft and unmanned aerial systems (UASs): A review. Remote Sens. 2019, 11, 1308. [Google Scholar] [CrossRef] [Green Version]
- Congress, S.S.; Puppala, A.J.; Lundberg, C.L. Total system error analysis of UAV-CRP technology for monitoring transportation infrastructure assets. Eng. Geol. 2018, 247, 104–116. [Google Scholar] [CrossRef]
- Outay, F.; Mengash, H.A.; Adnan, M. Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transp. Res. Part A Policy Pract. 2020, 141, 116–129. [Google Scholar] [CrossRef]
- Malihi, S.; Valadan Zoej, M.J.; Hahn, M. Large-scale accurate reconstruction of buildings employing point clouds generated from UAV imagery. Remote Sens. 2018, 10, 1148. [Google Scholar] [CrossRef] [Green Version]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Almalki, F.A. Survey on collaborative smart drones and internet of things for improving smartness of smart cities. IEEE Access 2019, 7, 128125–128152. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Afghah, F.; Sahal, R.; Hawbani, A.; Al-qaness, M.A.; Lee, B.; Guizani, M. Green internet of things using UAVs in B5G networks: A review of applications and strategies. Ad Hoc Netw. 2021, 117, 102505. [Google Scholar] [CrossRef]
- Qian, Y.; Wu, D.; Bao, W.; Lorenz, P. The internet of things for smart cities: Technologies and applications. IEEE Netw. 2019, 33, 4–5. [Google Scholar] [CrossRef]
- Orgeira-Crespo, P.; Ulloa, C.; Rey-Gonzalez, G.; Pérez García, J.A. Methodology for indoor positioning and landing of an unmanned aerial vehicle in a smart manufacturing plant for light part delivery. Electronics 2020, 9, 1680. [Google Scholar] [CrossRef]
- Lin, X.; Yajnanarayana, V.; Muruganathan, S.D.; Gao, S.; Asplund, H.; Maattanen, H.L.; Bergstrom, M.; Euler, S.; Wang, Y.P.E. The sky is not the limit: LTE for unmanned aerial vehicles. IEEE Commun. Mag. 2018, 56, 204–210. [Google Scholar] [CrossRef] [Green Version]
- Salh, A.; Audah, L.; Alhartomi, M.A.; Kim, K.S.; Alsamhi, S.H.; Almalki, F.A.; Abdullah, Q.; Saif, A.; Algethami, H. Smart Packet Transmission Scheduling in Cognitive IoT Systems: DDQN Based Approach. IEEE Access 2022, 10, 50023–50036. [Google Scholar] [CrossRef]
- Salh, A.; Audah, L.; Kim, K.S.; Alsamhi, S.H.; Alhartomi, M.A.; Abdullah, Q.; Almalki, F.A.; Algethami, H. Refiner GAN algorithmically enabled deep-RL for guaranteed traffic packets in real-time URLLC B5G communication systems. IEEE Access 2022, 10, 50662–50676. [Google Scholar] [CrossRef]
- Du, A.; Shen, Y.; Zhang, Q.; Tseng, L.; Aloqaily, M. CRACAU: Byzantine machine learning meets industrial edge computing in industry 5.0. IEEE Trans. Ind. Inform. 2021, 18, 5435–5445. [Google Scholar] [CrossRef]
- Maddikunta, P.K.R.; Pham, Q.V.; Prabadevi, B.; Deepa, N.; Dev, K.; Gadekallu, T.R.; Ruby, R.; Liyanage, M. Industry 5.0: A survey on enabling technologies and potential applications. J. Ind. Inf. Integr. 2022, 26, 100257. [Google Scholar] [CrossRef]
- Bonawitz, K.; Ivanov, V.; Kreuter, B.; Marcedone, A.; McMahan, H.B.; Patel, S.; Ramage, D.; Segal, A.; Seth, K. Practical secure aggregation for federated learning on user-held data. arXiv 2016, arXiv:1611.04482. [Google Scholar]
- Zhi, Y.; Fu, Z.; Sun, X.; Yu, J. Security and Privacy Issues of UAV: A Survey. Mob. Netw. Appl. 2019, 25, 95–101. [Google Scholar] [CrossRef]
- Syed, F.; Gupta, S.K.; Hamood Alsamhi, S.; Rashid, M.; Liu, X. A survey on recent optimal techniques for securing unmanned aerial vehicles applications. Trans. Emerg. Telecommun. Technol. 2021, 32, e4133. [Google Scholar] [CrossRef]
- Desnitsky, V.; Kotenko, I. Simulation and assessment of battery depletion attacks on unmanned aerial vehicles for crisis management infrastructures. Simul. Model. Pract. Theory 2021, 107, 102244. [Google Scholar] [CrossRef]
- Ossamah, A. Blockchain as a solution to Drone Cybersecurity. In Proceedings of the 2020 IEEE 6th World Forum on Internet of Things (WF-IoT), New Orleans, LA, USA, 2–16 June 2020; pp. 1–9. [Google Scholar] [CrossRef]
- Ch, R.; Srivastava, G.; Reddy Gadekallu, T.; Maddikunta, P.K.R.; Bhattacharya, S. Security and privacy of UAV data using blockchain technology. J. Inf. Secur. Appl. 2020, 55, 102670. [Google Scholar] [CrossRef]
- Xu, X.; Zeng, Y.; Guan, Y.L.; Zhang, R. Overcoming endurance issue: UAV-enabled communications with proactive caching. IEEE J. Sel. Areas Commun. 2018, 36, 1231–1244. [Google Scholar] [CrossRef] [Green Version]
- Mao, Y.; Zhang, J.; Letaief, K.B. Dynamic computation offloading for mobile-edge computing with energy harvesting devices. IEEE J. Sel. Areas Commun. 2016, 34, 3590–3605. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Survey Title | Highlight | A | B | C | D |
|---|---|---|---|---|---|---|
| [33] (2021) | UAV-enabled mobile edge computing for IoT based on AI: A comprehensive review | Using DL and ML approaches in UAV-enabled MEC network architecture applications | × | ✓ | ✓ | 4.0 |
| [32] (2021) | Energy efficient UAV-enabled mobile edge computing for IoT devices: a review | Using UAV-enabled MEC for energy-efficient resource management approaches in smart IoT device networks | × | × | ✓ | × |
| [34] (2022) | Survey on computation offloading in UAV- Enabled mobile edge computing | Focusing on computation offloading in UAV-enabled MEC | × | ✓ | ✓ | × |
| [35] (2019) | Survey on machine learning techniques for UAV-based communications | Discussing UAV-enabled MEC based on ML | × | × | ✓ | × |
| [24] (2020) | Federated learning for UAVs-enabled wireless networks: Use cases, challenges, and open problems | Discussing application of federated learning for UAVs in wireless networks | ✓ | × | ✓ | × |
| [36] (2022) | A Survey on the Convergence of Edge Computing and AI for UAVs: Opportunities and Challenges | Discussing UAVs, AI, edge computing, and edge AI, as well as technical issues and UAV applications | ✓ | × | ✓ | × |
| [37] (2021) | Artificial intelligence for UAV-enabled wireless networks: A survey | Combining intelligence at UAV networks in order to solve issues regarding UAV applications | ✓ | ✓ | ✓ | × |
| [38] (2022) | Bridging the Urban–Rural Connectivity Gap through Intelligent Space, Air, and Ground Networks | Introducing AI techniques for improving connectivity in remote areas using SAGINs | × | × | × | × |
| Our work | Computing in the Sky: A Survey on Intelligent Ubiquit ous Computing for UAV-Assisted 6G Networks and Industry 4.0/5.0 | Discussing intelligent UAV computing technology to enable 6G networks over industry 4.0/5.0 smart environments | ✓ | ✓ | ✓ | ✓ |
| Ref. | Highlight | Z | Y | R | T | Performance Metrics | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | D | E | F | G | H | I | J | K | L | M | ||||||
| [147] (2021) | Multi-UAVs act as computer servers for processing data gathered from users | × | × | ✓ | ✓ | × | × | × | × | × | × | × | ✓ | × | × | × | × | × |
| [18] (2019) | Single UAV as edge server and wireless energy transmitter to IoT devices | × | × | ✓ | ✓ | × | × | × | × | × | × | × | ✓ | × | × | × | ✓ | × |
| [78] (2021) | UAV-enabled MEC for autonomous delivery system. | × | × | ✓ | ✓ | × | ✓ | × | ✓ | × | × | × | ✓ | × | × | × | ✓ | ✓ |
| [67] (2021) | IoT energy consumption in UAV-enabled MEC system | × | × | ✓ | ✓ | × | × | × | × | × | × | × | ✓ | × | × | ✓ | × | ✓ |
| [151] (2021) | MEC with UAVs for traffic management | ✓ | × | ✓ | ✓ | × | ✓ | ✓ | × | × | × | × | × | × | × | × | × | × |
| [83] (2017) | UAV-based MEC for enhancing network connectivity in uncovered areas. | × | × | ✓ | ✓ | × | × | × | × | × | ✓ | × | × | × | × | × | × | × |
| [86] (2019) | Reducing the computational complexity of UAV-aided MEC. | × | × | ✓ | ✓ | × | × | × | × | × | × | × | ✓ | × | × | × | × | × |
| [98] (2021) | RL for QoS enhancement in a multi-UAV-enabled MEC system. | ✓ | × | ✓ | ✓ | × | × | × | × | × | × | × | × | × | × | ✓ | × | × |
| [102] (2019) | UAVs in a hybrid MEC network. | ✓ | × | ✓ | ✓ | × | ✓ | × | × | × | × | × | × | × | × | × | × | × |
| [79] (2020) | Intelligent task offloading algorithm for UAV-empowered MEC services. | ✓ | × | ✓ | ✓ | × | ✓ | ✓ | × | × | × | × | × | × | × | × | × | × |
| [153] (2019) | Enhancing the performance of the entire MEC UAV platform. | × | × | ✓ | ✓ | × | ✓ | ✓ | × | × | ✓ | × | × | × | × | ✓ | × | |
| [107] (2020) | UAV-assisted MEC acting as a relay between MEC and users. | ✓ | × | ✓ | ✓ | × | ✓ | × | × | × | × | × | × | × | × | × | ✓ | |
| [103] (2021) | AI techniques are used in a UAV-enabled MEC for the NOMA system. | ✓ | × | ✓ | ✓ | × | × | × | × | × | × | × | × | × | × | ✓ | ✓ | |
| [146] (2018) | Integration of UAV and ground vehicles in terms of computing, communication, and storage. | × | × | ✓ | ✓ | × | ✓ | ✓ | × | × | × | ✓ | × | × | × | × | × | × |
| [17] (2019) | UAV for task offloading improvement with reducing energy consumption. | × | × | ✓ | ✓ | × | × | × | ✓ | × | × | × | ✓ | × | × | × | × | ✓ |
| [68] (2020) | UAV-aided MEC of a multiuser system based on frequency division multiple access for demonstrating task offloading. | × | × | ✓ | ✓ | × | × | × | × | ✓ | × | × | ✓ | × | × | × | × | ✓ |
| [108] (2019) | UAV-aided MEC based on NOMA. | × | × | ✓ | ✓ | × | ✓ | × | × | × | ✓ | × | ✓ | × | ✓ | × | × | ✓ |
| [90] (2020) | Power control and resource allocation in a UAV-empowered MEC system. | ✓ | ✓ | ✓ | ✓ | × | × | × | ✓ | × | ✓ | × | ✓ | × | ✓ | × | ✓ | × |
| [11] (2018) | UAVs as MEC-assisted wireless communication networks to achieve excellent QoS for users. | × | × | ✓ | ✓ | × | × | ✓ | × | × | × | × | ✓ | × | × | ✓ | × | ✓ |
| [70] (2021) | UAV-enabled MEC to optimize users’ task offloading and energy demands. | ✓ | × | ✓ | ✓ | × | × | ✓ | ✓ | × | × | × | ✓ | × | × | × | × | ✓ |
| [73] (2019) | Securing a UAV-MEC system where multiple users offload large computing tasks. | × | × | ✓ | ✓ | ✓ | × | ✓ | × | × | × | × | × | × | × | × | × | ✓ |
| Ref. | Highlight | Z | Y | R | T | Performance Metrics | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | D | E | F | G | H | I | J | K | L | M | ||||||
| [72] (2019) | Securing a UAV-enabled MEC from offloading and network attacks. | × | × | ✓ | ✓ | ✓ | ✓ | × | × | × | × | × | × | × | × | × | × | × |
| [130] (2021) | Enhancing the processing capacity and the security of UAV-enabled MEC by optimizing the trajectory and resources. | × | × | ✓ | ✓ | ✓ | × | × | × | × | × | × | × | × | × | × | × | × |
| [53] (2019) | Improving the security and privacy of UAVs. | × | × | ✓ | ✓ | ✓ | × | × | × | × | × | × | × | × | × | × | × | × |
| [54] (2021) | Integration of blockchain and FL for drone edge computing. | ✓ | ✓ | ✓ | ✓ | ✓ | × | ✓ | ✓ | × | ✓ | × | ✓ | ✓ | × | ✓ | × | × |
| [63] (2020) | DNN for image processing in UAV, i.e., an edge server and improving product quality and cost. | ✓ | × | ✓ | ✓ | × | × | × | ✓ | × | × | × | × | × | ✓ | × | × | × |
| [74] (2020) | Reducing computation time and energy usage by using task offloading techniques for multi-UAV-enabled MEC. | × | × | ✓ | ✓ | × | × | × | ✓ | × | × | × | ✓ | × | ✓ | × | × | ✓ |
| [71] (2017) | Calculation of offloading task in UAV-enabled MEC. | × | × | ✓ | ✓ | × | × | × | ✓ | × | × | × | ✓ | × | ✓ | × | × | ✓ |
| [69] (2018) | UAV deployment as a mobile edge server to manage real-time offloading processing activities for users. | ✓ | × | ✓ | ✓ | × | × | × | × | × | × | × | × | × | × | ✓ | × | ✓ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Hassan, J.; Alhartomi, M.A.; Shvetsova, S.V.; Sahal, R.; Hawbani, A. Computing in the Sky: A Survey on Intelligent Ubiquitous Computing for UAV-Assisted 6G Networks and Industry 4.0/5.0. Drones 2022, 6, 177. https://doi.org/10.3390/drones6070177
Alsamhi SH, Shvetsov AV, Kumar S, Hassan J, Alhartomi MA, Shvetsova SV, Sahal R, Hawbani A. Computing in the Sky: A Survey on Intelligent Ubiquitous Computing for UAV-Assisted 6G Networks and Industry 4.0/5.0. Drones. 2022; 6(7):177. https://doi.org/10.3390/drones6070177
Chicago/Turabian StyleAlsamhi, Saeed Hamood, Alexey V. Shvetsov, Santosh Kumar, Jahan Hassan, Mohammed A. Alhartomi, Svetlana V. Shvetsova, Radhya Sahal, and Ammar Hawbani. 2022. "Computing in the Sky: A Survey on Intelligent Ubiquitous Computing for UAV-Assisted 6G Networks and Industry 4.0/5.0" Drones 6, no. 7: 177. https://doi.org/10.3390/drones6070177
APA StyleAlsamhi, S. H., Shvetsov, A. V., Kumar, S., Hassan, J., Alhartomi, M. A., Shvetsova, S. V., Sahal, R., & Hawbani, A. (2022). Computing in the Sky: A Survey on Intelligent Ubiquitous Computing for UAV-Assisted 6G Networks and Industry 4.0/5.0. Drones, 6(7), 177. https://doi.org/10.3390/drones6070177