
Multi-UAV Coverage through Two-Step Auction in Dynamic Environments


Abstract
:1. Introduction
1.1. Related Work
1.2. Contributions
- We design the comprehensive MCTA framework for area coverage with multiple energy-limited UAVs in dynamic environments.
- We propose the two-step auction mechanism to select the optimal next action and avoid dynamic obstacles.
- We develop a reverse auction mechanism to avoid conflicts and balance workloads between UAVs.
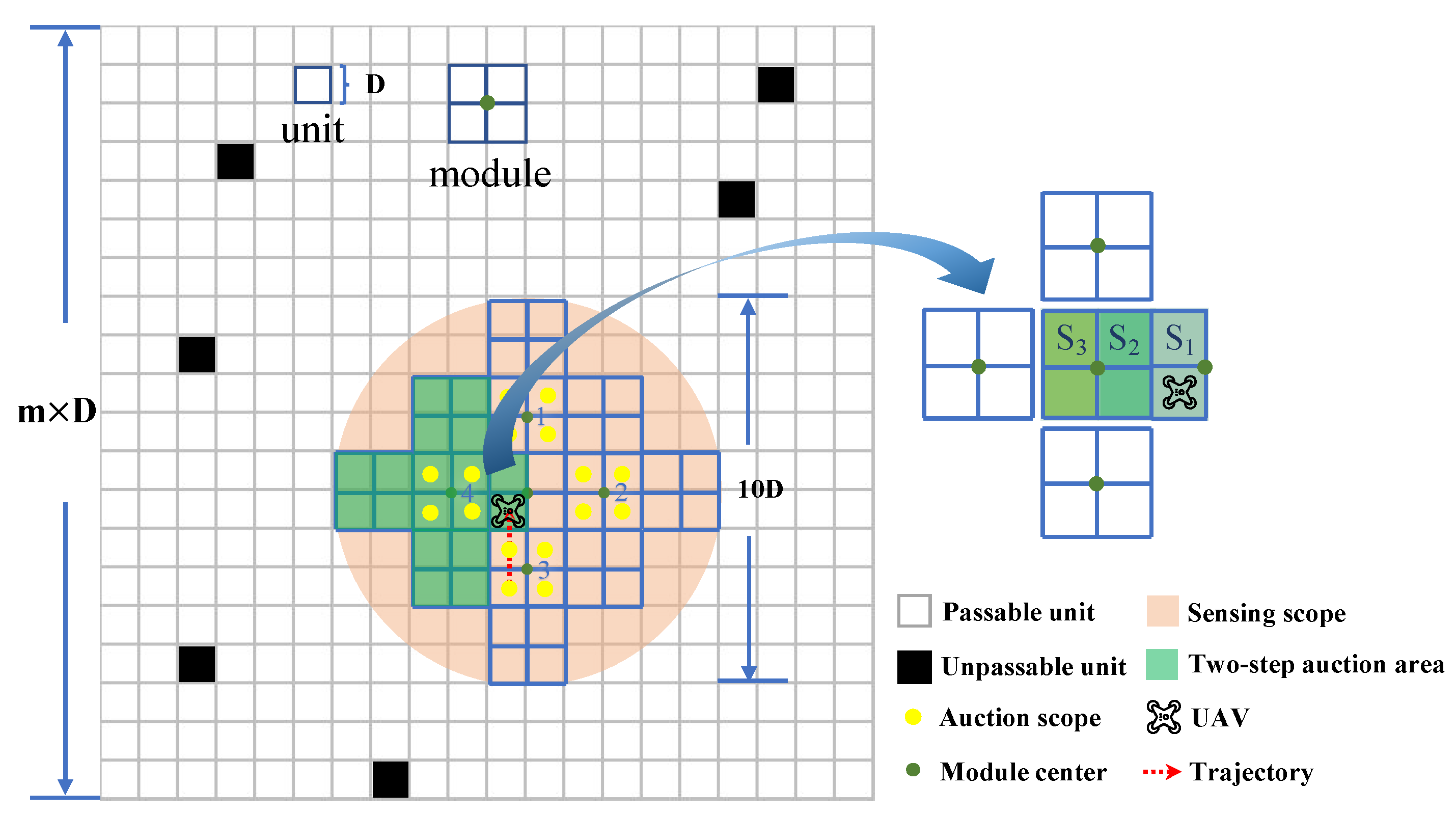
2. Problem Formulation
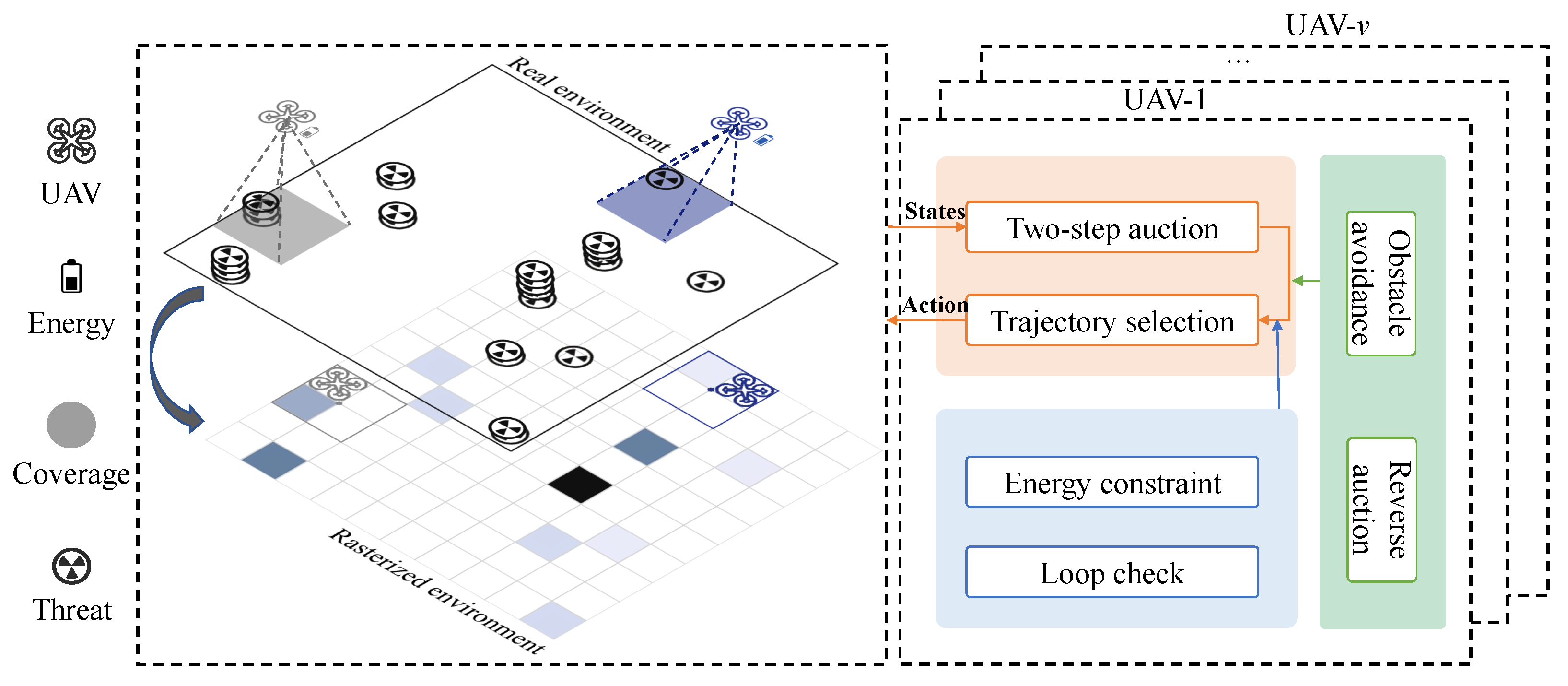
3. MCTA Framework
3.1. Two-Step Auction
| Algorithm 1 Two-step Auction. |
Input: UAV position p, orientation o Output: Four models sorted by bidding price and orientation o 1: for to 4 do 2: ; 3: Assume that the UAV is in module ; 4: Based on module , calculate ; 5: ; 6: end for 7: ; 8: return |
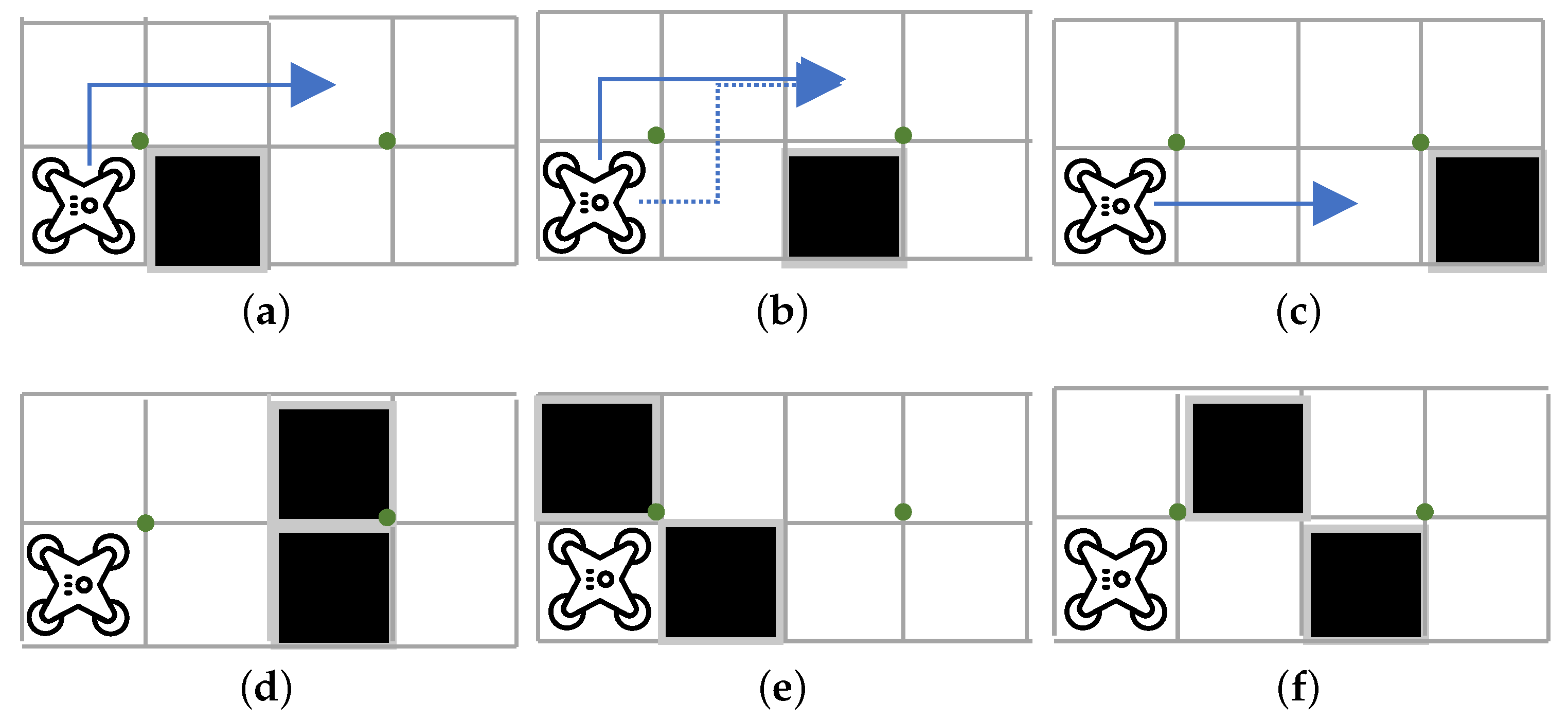
3.2. Obstacle Avoidance and Multi-UAV Conflict Resolution
3.3. Energy Constraint and Loop-Check
3.4. MCTA Framework
| Algorithm 2 MCTA. |
Input:, , , 1: Two-step Auction (); 2: ; 3: for to 4 do 4: if module m corresponding to is reachable then 5: direction of module m; 6: ; 7: break 8: end if 9: end for 10: if then 11: Judge if there is a multi-UAV conflict; 12: if no conflict occurs or win the conflict then 13: Check the remaining energy and the loop; 14: if and not in the loop then 15: Choose a suitable way to reach module m; 16: the position of module m; 17: else 18: ; 19: end if 20: else 21: Stay in place for next step; 22: end if 23: else 24: ; 25: end if |
4. Experiments and Analysis
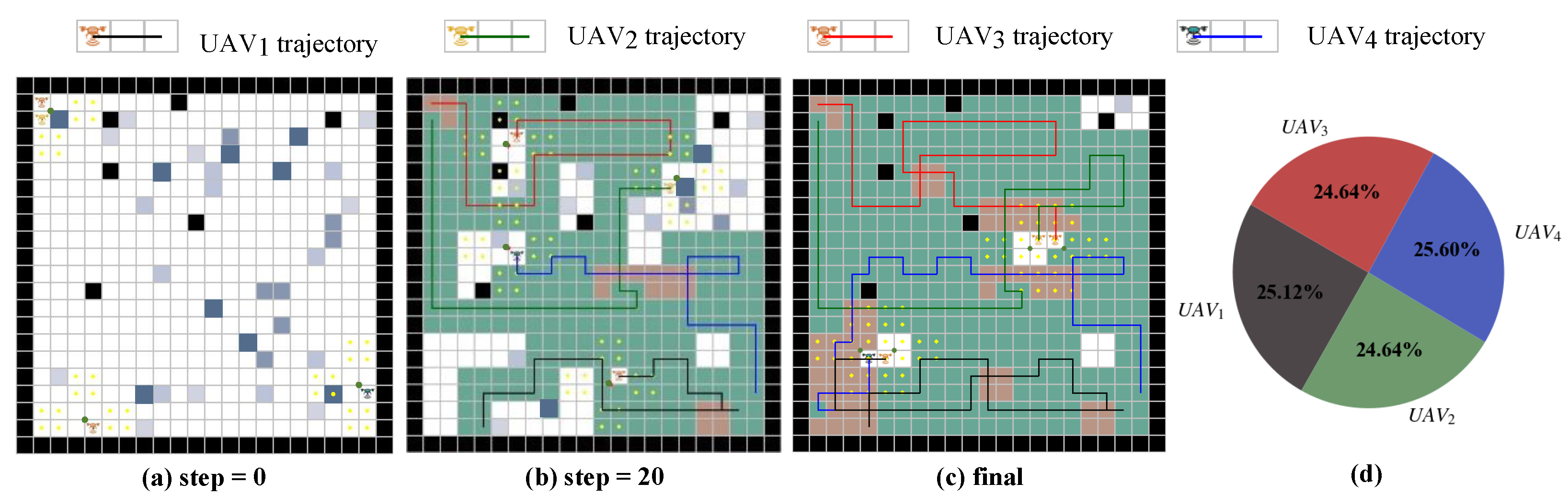
4.1. Qualitative Evaluation
4.2. Quantitative Evaluation
- Coverage rate: The coverage rate is defined as the ratio between the area of covered modules and the area of the entire environment:where is the set of , represents the number of elements in a set, and represents the union of all UAV flight trajectories.
- Repeated coverage rate: The repeated coverage rate is defined as:where represents the difference between the flight mileage of all UAVs and the number of units passed by the flight trajectory, that is, the units that are repeatedly covered are accumulated by the frequency of coverage.
- Average flight deviation: To investigate the degree of deviation of the flight path of each UAV from its average path, the average flight deviation is defined as follows:where is the average flight mileage. measures whether the workload of each UAV is balanced.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Z.; Wang, X.; Shen, L.; Zhao, S.; Cong, Y.; Li, J.; Yin, D.; Jia, S.; Xiang, X. Mission-oriented miniature fixed-wing UAV swarms: A multilayered and distributed architecture. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1588–1602. [Google Scholar] [CrossRef]
- Yan, C.; Xiang, X.; Wang, C. Towards real-time path planning through deep reinforcement learning for a UAV in dynamic environments. J. Intell. Robot. Syst. 2020, 98, 297–309. [Google Scholar] [CrossRef]
- Ball, Z.; Odonkor, P.; Chowdhury, S. A swarm-intelligence approach to oil spill mapping using unmanned aerial vehicles. In Proceedings of the AIAA Information Systems-AIAA Infotech@ Aerospace, Grapevine, TX, USA, 9–13 January 2017; p. 1157. [Google Scholar]
- Pannozzi, P.; Valavanis, K.P.; Rutherford, M.J.; Guglieri, G.; Scanavino, M.; Quagliotti, F. Urban monitoring of smart communities using UAS. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 866–873. [Google Scholar]
- Alevizos, E.; Oikonomou, D.; Argyriou, A.V.; Alexakis, D.D. Fusion of Drone-Based RGB and Multi-Spectral Imagery for Shallow Water Bathymetry Inversion. Remote Sens. 2022, 14, 1127. [Google Scholar] [CrossRef]
- Bandini, F.; Lopez-Tamayo, A.; Merediz-Alonso, G.; Olesen, D.; Jakobsen, J.; Wang, S.; Garcia, M.; Bauer-Gottwein, P. Unmanned aerial vehicle observations of water surface elevation and bathymetry in the cenotes and lagoons of the Yucatan Peninsula, Mexico. Hydrogeol. J. 2018, 26, 2213–2228. [Google Scholar] [CrossRef] [Green Version]
- Specht, M.; Stateczny, A.; Specht, C.; Widźgowski, S.; Lewicka, O.; Wiśniewska, M. Concept of an Innovative Autonomous Unmanned System for Bathymetric Monitoring of Shallow Waterbodies (INNOBAT System). Energies 2021, 14, 5370. [Google Scholar] [CrossRef]
- Stateczny, A.; Specht, C.; Specht, M.; Brčić, D.; Jugović, A.; Widźgowski, S.; Wiśniewska, M.; Lewicka, O. Study on the Positioning Accuracy of GNSS/INS Systems Supported by DGPS and RTK Receivers for Hydrographic Surveys. Energies 2021, 14, 7413. [Google Scholar] [CrossRef]
- Wang, D.; Xing, S.; He, Y.; Yu, J.; Xu, Q.; Li, P. Evaluation of a New Lightweight UAV-Borne Topo-Bathymetric LiDAR for Shallow Water Bathymetry and Object Detection. Sensors 2022, 22, 1379. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Goodrich, M.A. UAV intelligent path planning for wilderness search and rescue. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 709–714. [Google Scholar]
- Kohlbrecher, S.; Kunz, F.; Koert, D.; Rose, C.; Manns, P.; Daun, K.; Schubert, J.; Stumpf, A.; von Stryk, O. Towards highly reliable autonomy for urban search and rescue robots. In Proceedings of the Robot Soccer World Cup; Springer: Berlin/Heidelberg, Germany, 2014; pp. 118–129. [Google Scholar]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef] [Green Version]
- Gao, G.Q.; Xin, B. A-STC: Auction-based spanning tree coverage algorithm formotion planning of cooperative robots. Front. Inf. Technol. Electron. Eng. 2019, 20, 18–31. [Google Scholar] [CrossRef]
- Viet, H.H.; Dang, V.H.; Laskar, M.N.U.; Chung, T. BA*: An online complete coverage algorithm for cleaning robots. Appl. Intell. 2013, 39, 217–235. [Google Scholar] [CrossRef]
- Khamis, A.; Hussein, A.; Elmogy, A. Multi-robot task allocation: A review of the state-of-the-art. Coop. Robot. Sens. Netw. 2015, 2015, 31–51. [Google Scholar]
- Khan, A.S.; Chen, G.; Rahulamathavan, Y.; Zheng, G.; Assadhan, B.; Lambotharan, S. Trusted UAV Network Coverage Using Blockchain, Machine Learning, and Auction Mechanisms. IEEE Access 2020, 8, 118219–118234. [Google Scholar] [CrossRef]
- Gabriely, Y.; Rimon, E. Spiral-STC: An on-line coverage algorithm of grid environments by a mobile robot. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 954–960. [Google Scholar]
- Sonti, S.; Virani, N.; Jha, D.K.; Mukherjee, K.; Ray, A. Language measure-theoretic path planning in the presence of dynamic obstacles. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 5110–5115. [Google Scholar]
- Gorbenko, A.; Popov, V. The multi-robot forest coverage for weighted terrain1. J. Ambient. Intell. Smart Environ. 2015, 7, 835–847. [Google Scholar] [CrossRef]
- Yehoshua, R.; Agmon, N.; Kaminka, G.A. Robotic adversarial coverage of known environments. Int. J. Robot. Res. 2016, 35, 1419–1444. [Google Scholar] [CrossRef]
- Shnaps, I.; Rimon, E. Online coverage of planar environments by a battery powered autonomous mobile robot. IEEE Trans. Autom. Sci. Eng. 2016, 13, 425–436. [Google Scholar] [CrossRef]
- Wei, M.; Isler, V. Coverage path planning under the energy constraint. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 368–373. [Google Scholar]
- Wu, C.; Dai, C.; Gong, X.; Liu, Y.J.; Wang, J.; Gu, X.D.; Wang, C.C. Energy-efficient coverage path planning for general terrain surfaces. IEEE Robot. Autom. Lett. 2019, 4, 2584–2591. [Google Scholar] [CrossRef]
- Modares, J.; Ghanei, F.; Mastronarde, N.; Dantu, K. Ub-anc planner: Energy efficient coverage path planning with multiple drones. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6182–6189. [Google Scholar]
- Jensen-Nau, K.R.; Hermans, T.; Leang, K.K. Near-Optimal Area-Coverage Path Planning of Energy-Constrained Aerial Robots with Application in Autonomous Environmental Monitoring. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1453–1468. [Google Scholar] [CrossRef]
- Strimel, G.P.; Veloso, M.M. Coverage planning with finite resources. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2950–2956. [Google Scholar]
- Dutta, A.; Sharma, G. A Constant-Factor Approximation Algorithm for Online Coverage Path Planning with Energy Constraint. arXiv 2019, arXiv:1906.11750. [Google Scholar]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | |||||
| a | 4 | 3 | 2 | 1 | 0 (obstacles cannot move) |
| Environment | Size | v | Static | Dynamic | ||||
|---|---|---|---|---|---|---|---|---|
| free | 20 × 20 | 1 | 93.54% | 15.66% | 0 | 93.06% | 14.87% | 0 |
| 4 | 92.18% | 23.37% | 1.34 | 91.98% | 23.32% | 1.44 | ||
| 8 | 88.14% | 25.11% | 1.41 | 88.52% | 24.66% | 1.44 | ||
| 40 × 40 | 1 | 91.06% | 19.30% | 0 | 91.74% | 19.75% | 0 | |
| 4 | 91.09% | 23.39% | 2.26 | 91.08% | 23.92% | 2.41 | ||
| convex | 20 × 20 | 1 | 96.34% | 30.32% | 0 | 96.52% | 31.40% | 0 |
| 4 | 95.59% | 38.91% | 1.58 | 96.28% | 40.17% | 1.6 | ||
| 12 | 92.42% | 49.06% | 1.4 | 92.70% | 48.36% | 1.36 | ||
| 40 × 40 | 1 | 94.58% | 33.51% | 0 | 94.73% | 32.47% | 0 | |
| 8 | 95.39% | 43.23% | 3.9 | 95.40% | 43.24% | 3.86 | ||
| 12 | 95.08% | 45.48% | 2.74 | 95.20% | 45.78% | 2.74 | ||
| maze | 20 × 20 | 8 | 81.89% | 33.32% | 3.42 | 80.53% | 35.26% | 3.4 |
| 12 | 82.36% | 38.42% | 2.64 | 82.67% | 41.01% | 2.43 | ||
| 40 × 40 | 1 | 79.47% | 29.80% | 0 | 79.75% | 29.97% | 0 | |
| 12 | 87.07% | 45.11% | 9.13 | 87.67% | 45.29% | 8.93 | ||
| ring | 20 × 20 | 1 | 83.02% | 22.78% | 0 | 83.44% | 24.26% | 0 |
| 12 | 86.82% | 46.64% | 1.35 | 86.43% | 47.05% | 1.43 | ||
| 40 × 40 | 1 | 81.27% | 33.76% | 0 | 80.81% | 32.32% | 0 | |
| 12 | 89.09% | 49.53% | 2.95 | 88.42% | 50.27% | 2.97 | ||
| honeycomb | 20 × 20 | 1 | 75.74% | 36.19% | 0 | 75.75% | 35.62% | 0 |
| 8 | 80.75% | 37.57% | 3.27 | 80.45% | 37.95% | 3.33 | ||
| strip | 20 × 20 | 1 | 92.07% | 28.82% | 0 | 93.15% | 29.16% | 0 |
| 4 | 93.31% | 39.58% | 3.26 | 93.70% | 39.52% | 2.96 | ||
| 8 | 93.30% | 45.57% | 1.82 | 92.89% | 44.94% | 1.85 | ||
| 40 × 40 | 1 | 87.42% | 28.94% | 0 | 87.86% | 30.27% | 0 | |
| 12 | 92.13% | 46.28% | 4.83 | 92.61% | 45.93% | 4.88 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Tan, Q.; Yan, C.; Chang, Y.; Xiang, X.; Zhou, H. Multi-UAV Coverage through Two-Step Auction in Dynamic Environments. Drones 2022, 6, 153. https://doi.org/10.3390/drones6060153
Sun Y, Tan Q, Yan C, Chang Y, Xiang X, Zhou H. Multi-UAV Coverage through Two-Step Auction in Dynamic Environments. Drones. 2022; 6(6):153. https://doi.org/10.3390/drones6060153
Chicago/Turabian StyleSun, Yihao, Qin Tan, Chao Yan, Yuan Chang, Xiaojia Xiang, and Han Zhou. 2022. "Multi-UAV Coverage through Two-Step Auction in Dynamic Environments" Drones 6, no. 6: 153. https://doi.org/10.3390/drones6060153
APA StyleSun, Y., Tan, Q., Yan, C., Chang, Y., Xiang, X., & Zhou, H. (2022). Multi-UAV Coverage through Two-Step Auction in Dynamic Environments. Drones, 6(6), 153. https://doi.org/10.3390/drones6060153