
A Time-Efficient Method to Avoid Collisions for Collision Cones: An Implementation for UAVs Navigating in Dynamic Environments


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
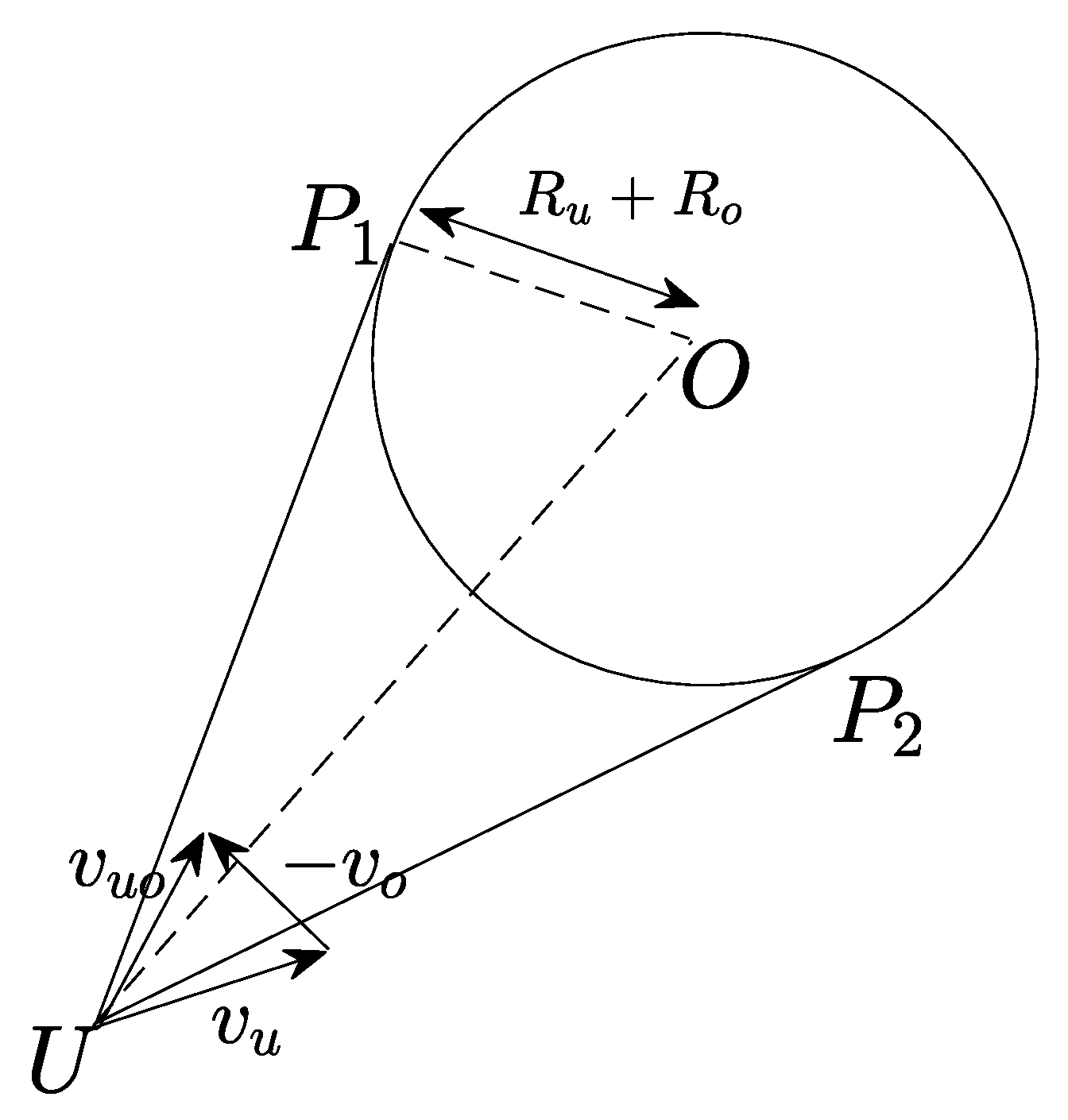
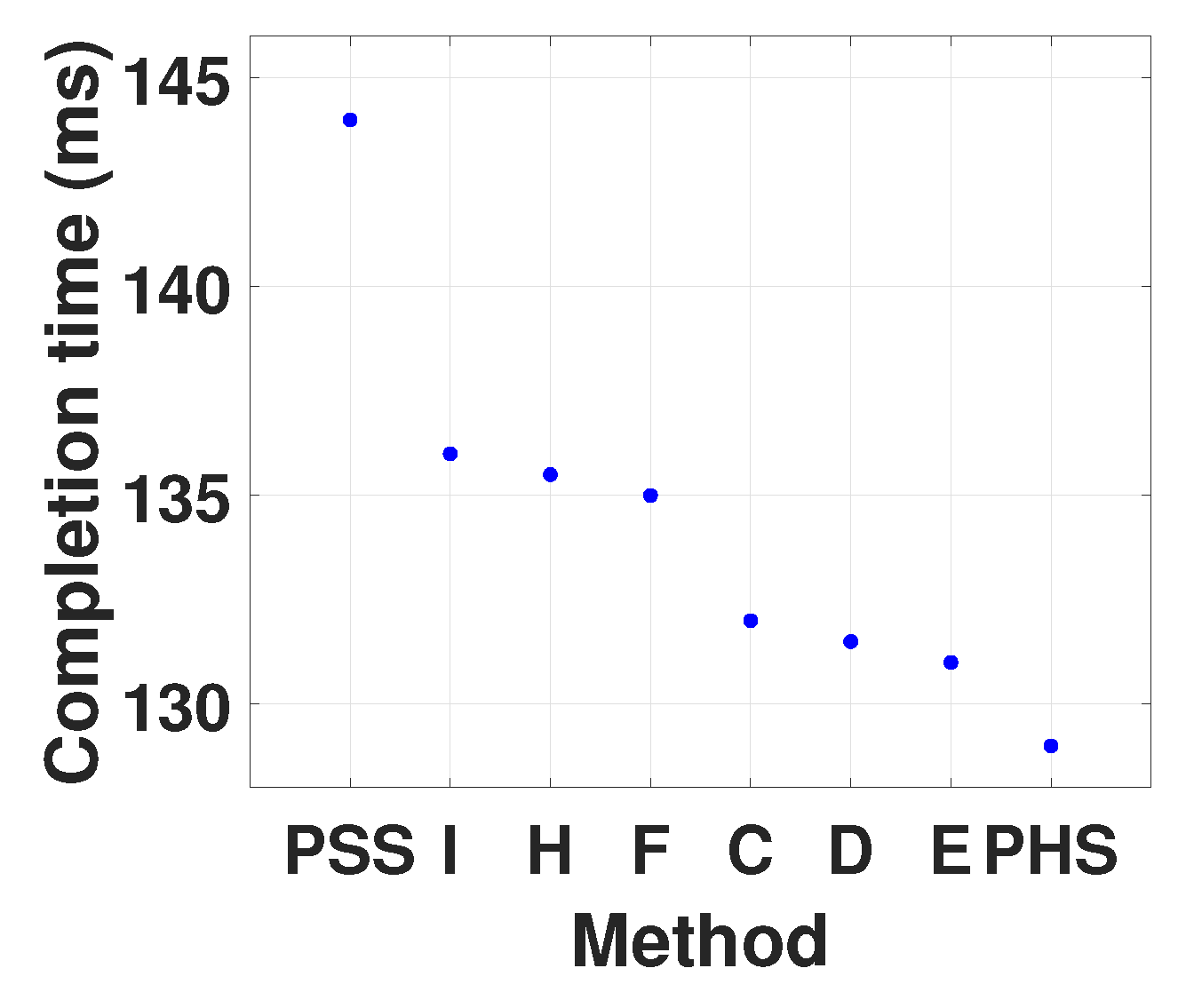
2. System Description and Problem Definition
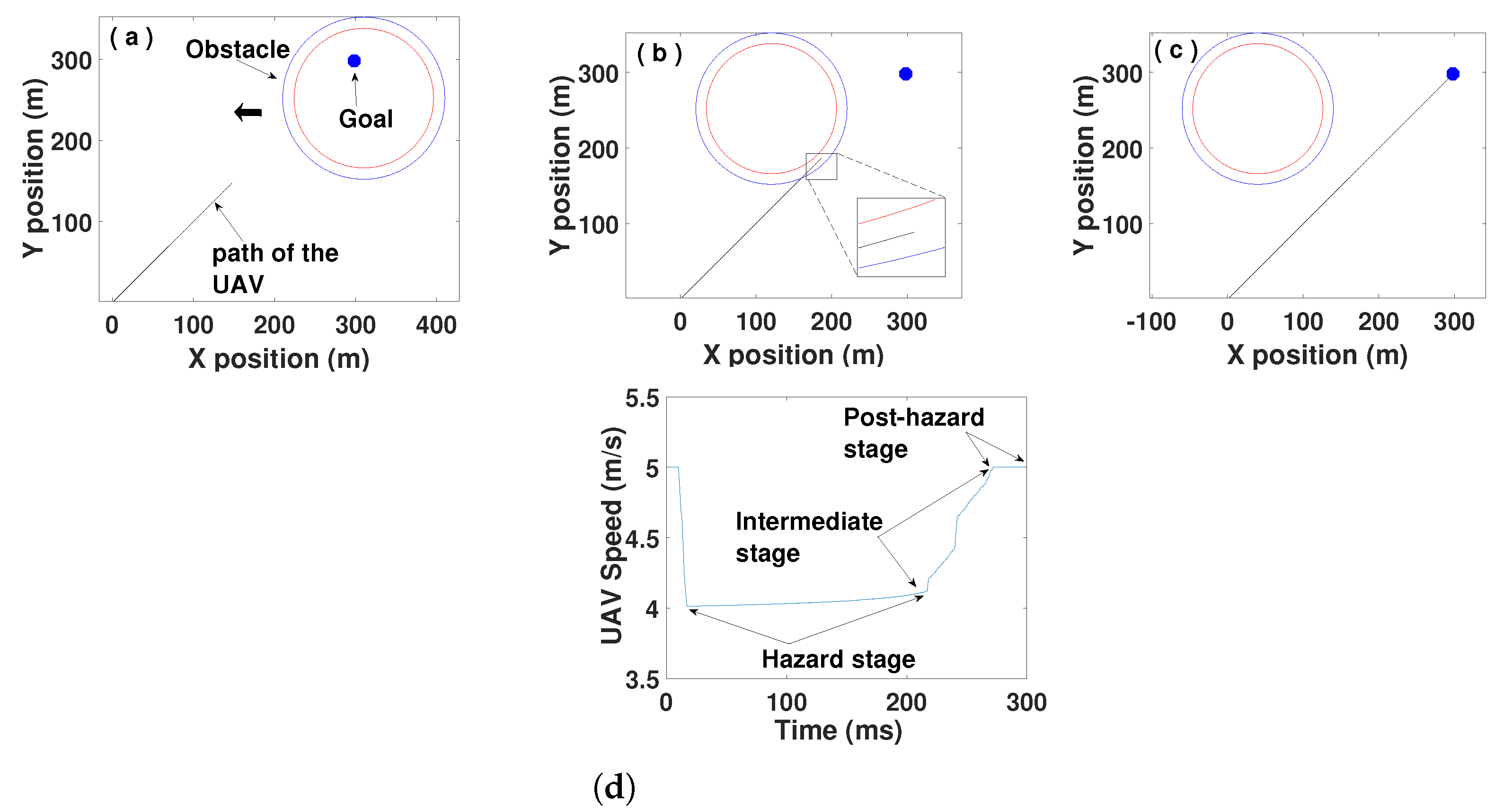
3. Purely Speed Solution(PSS)
3.1. Speed Calculation Methodology (Calculation of )
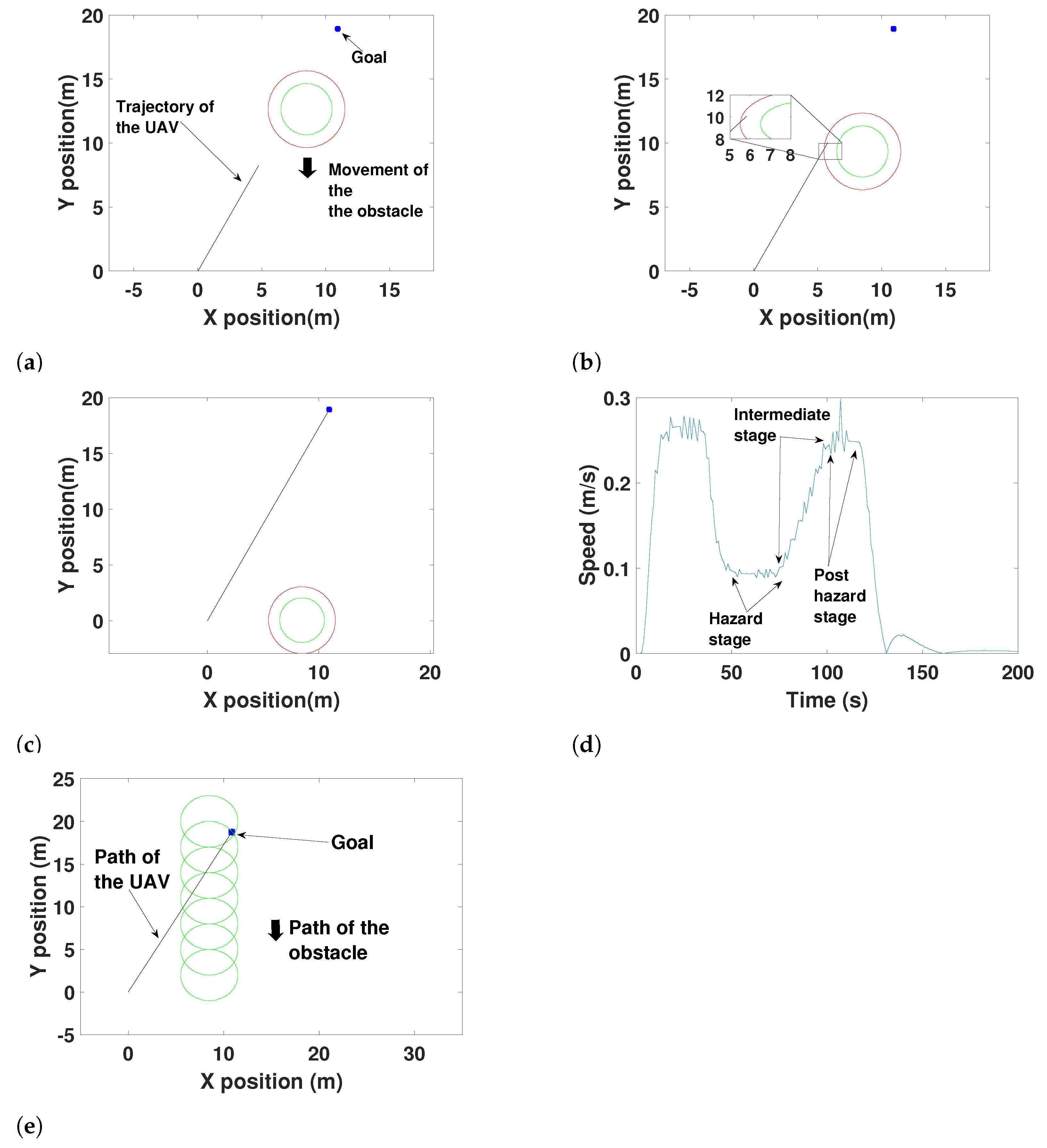
3.1.1. Hazard Stage
3.1.2. Intermediate Stage
3.1.3. Post-Hazard Stage
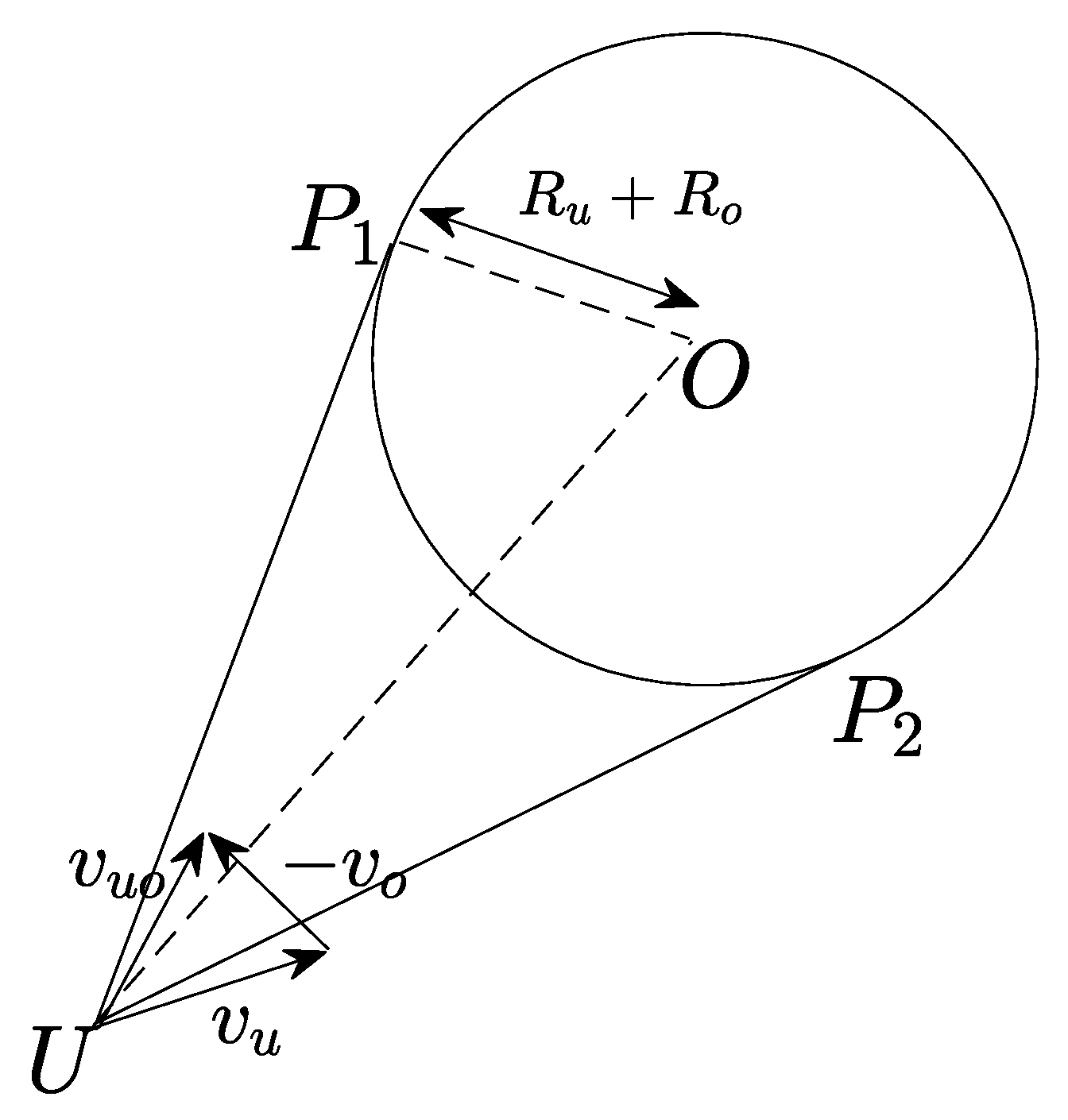
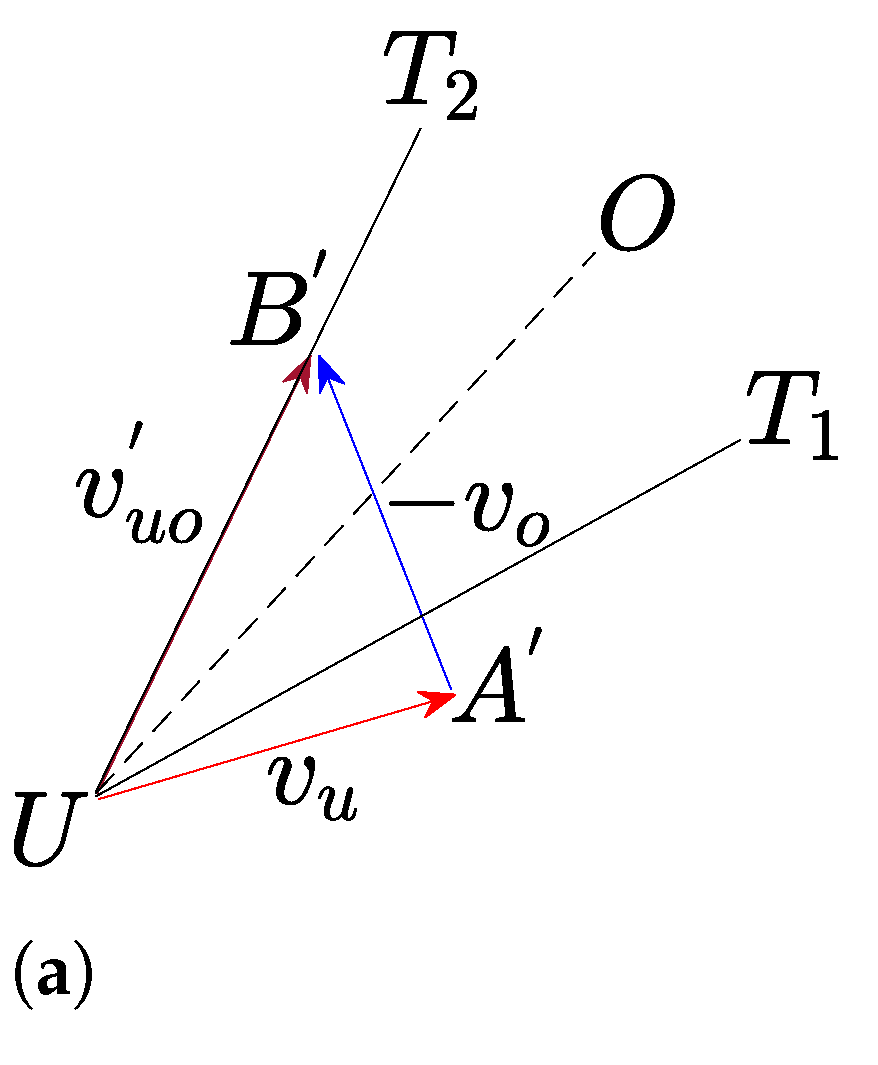
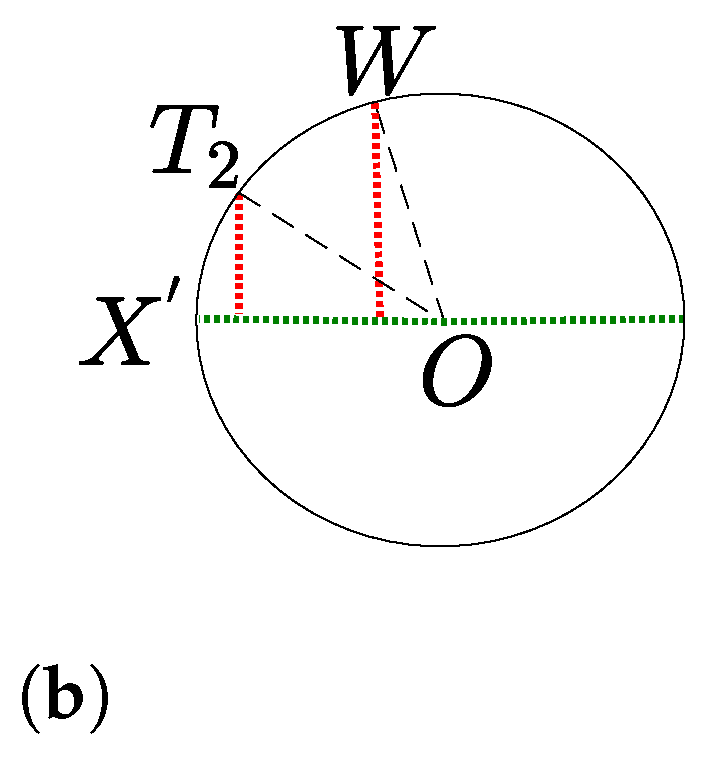
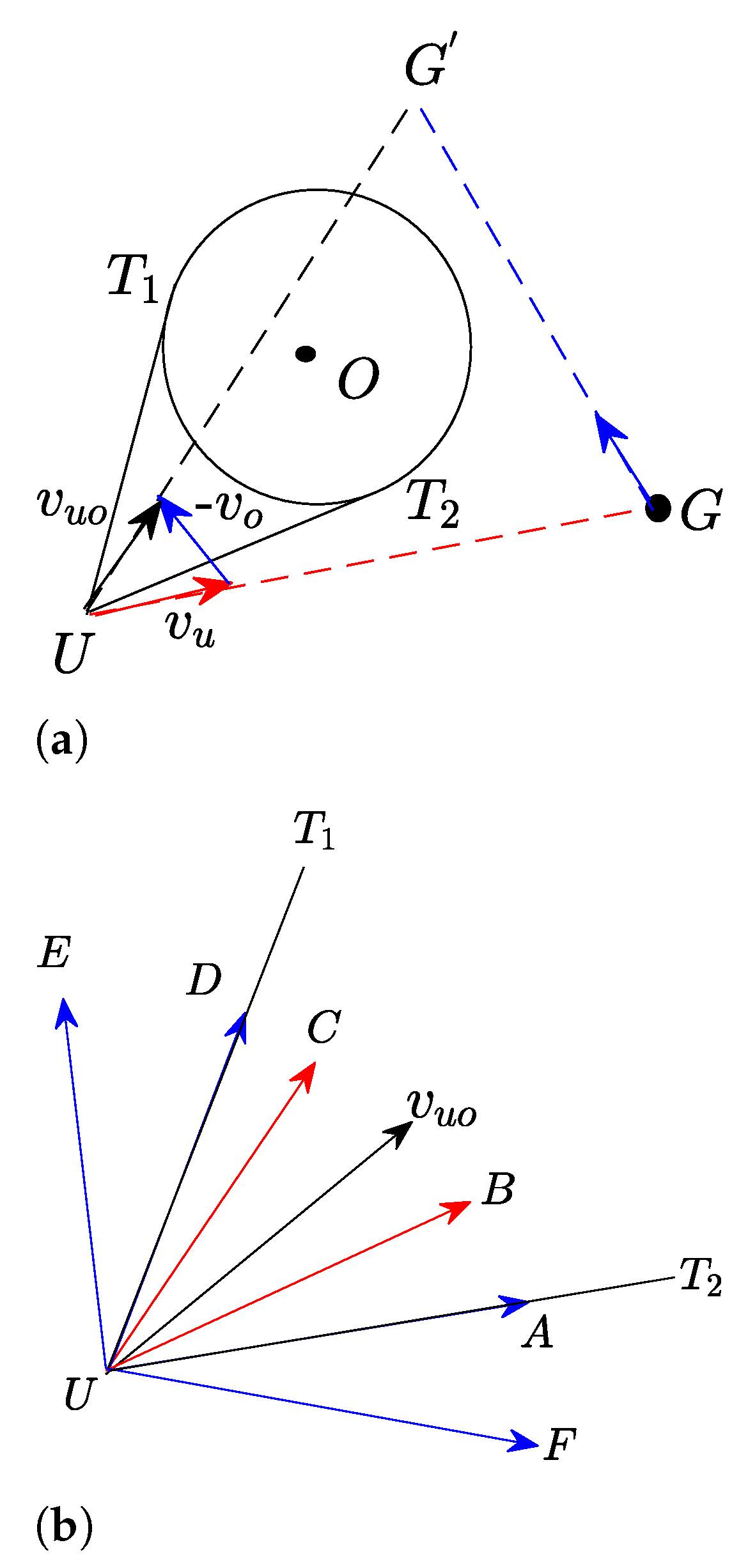
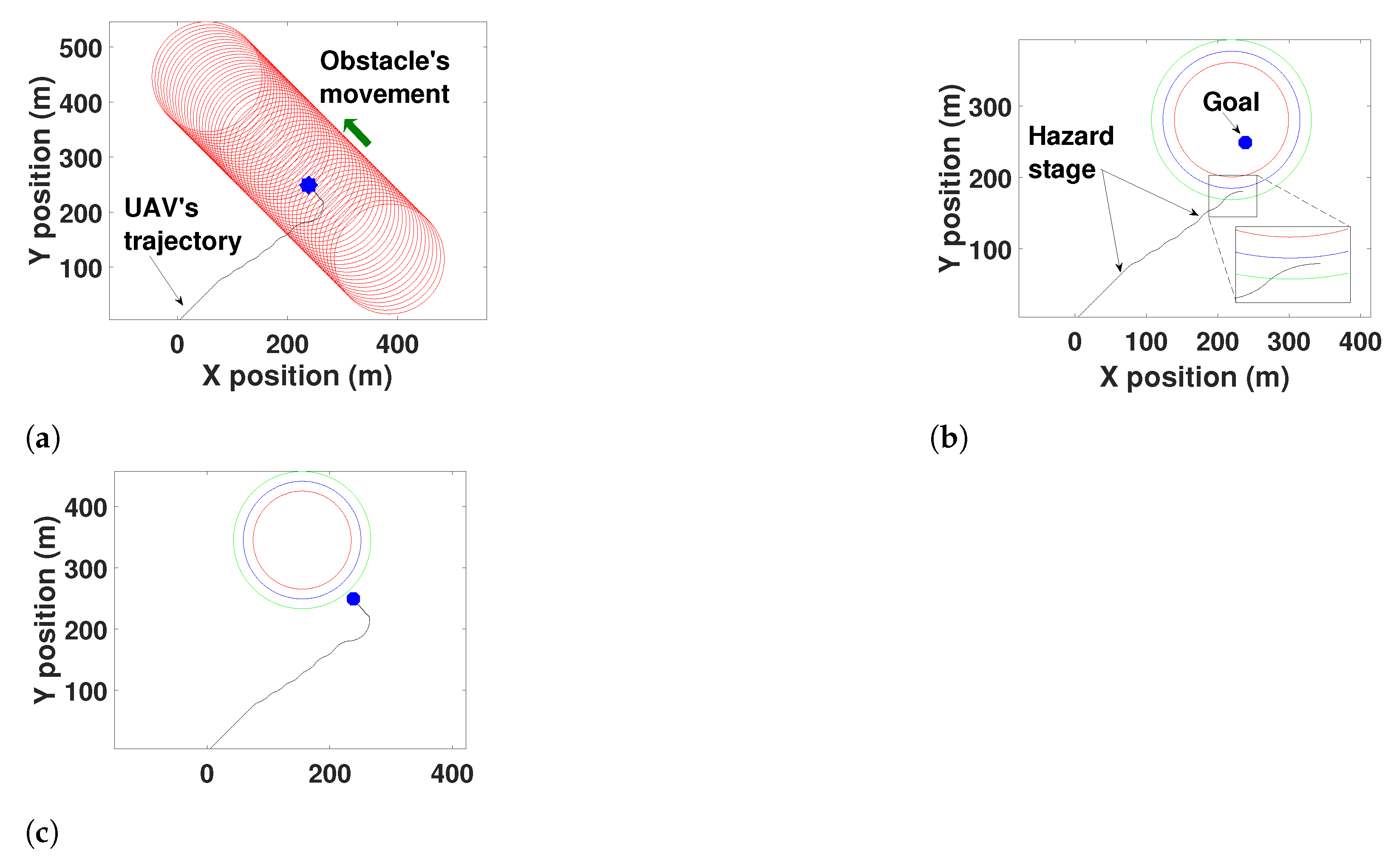
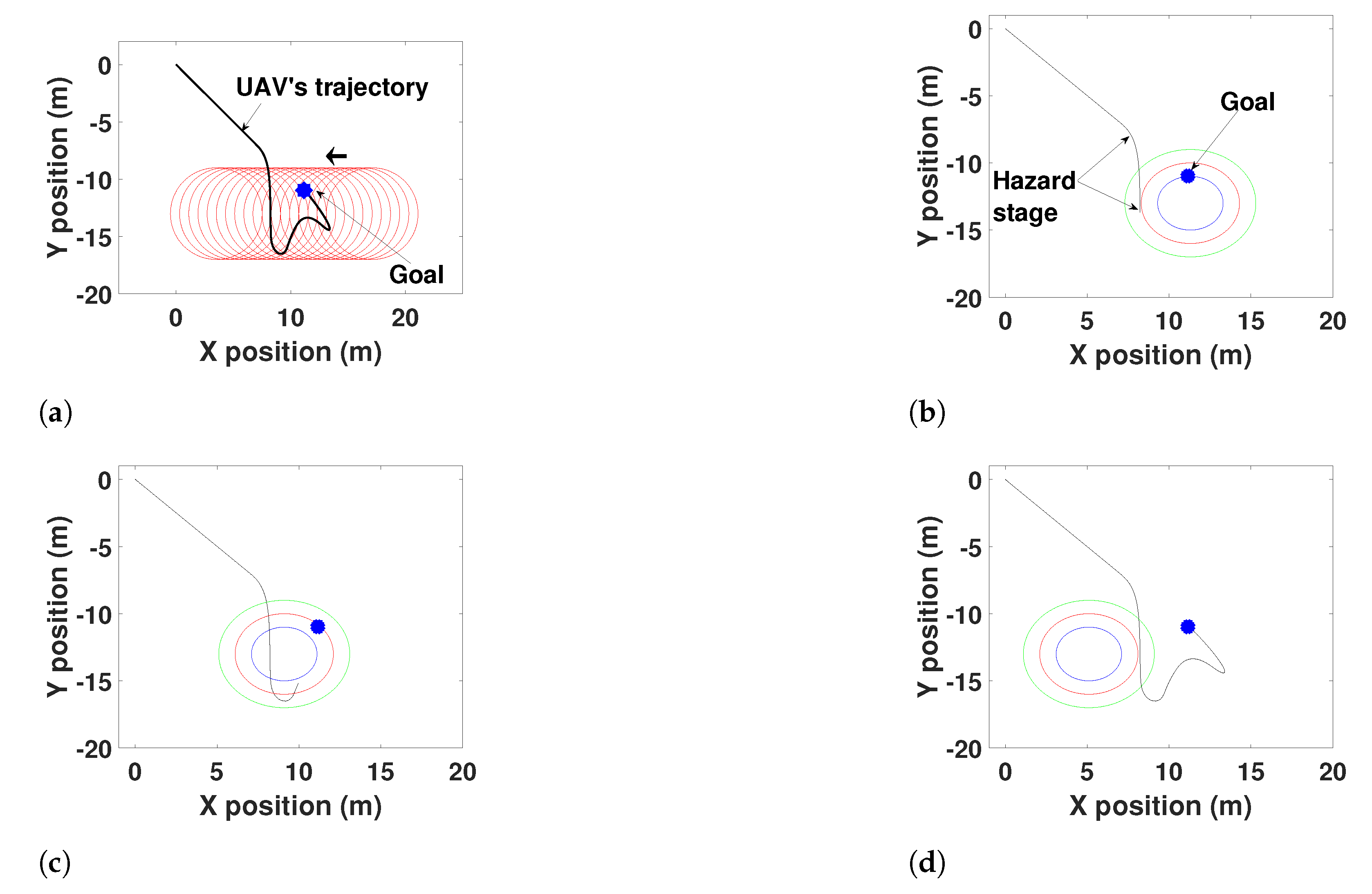
4. Purely Heading Solution (PHS)
4.1. System Description for the Heading Based Avoidance Task
4.2. Introduction to Method and the Calculation of
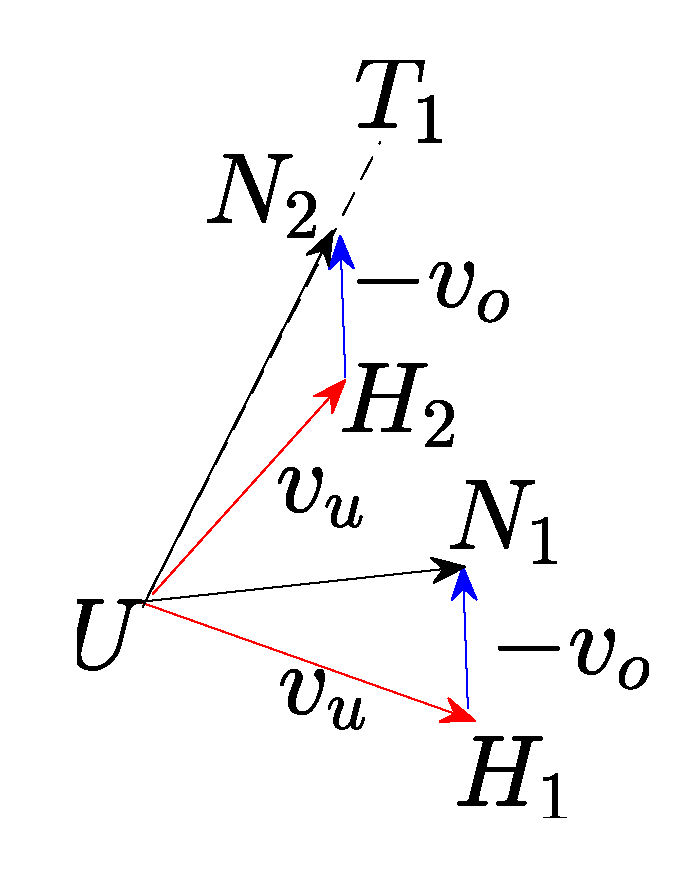
4.2.1. Hazard Stage
4.2.2. Intermediate Stage
| Algorithm 1 Heading at |
| Input: , , |
Output:
|
4.2.3. Post-Hazard Stage
4.3. Introduction to Phsi Method and the Time-Efficiency Comparison between Phso and Phsi
- —Relative velocity of the UAV during the hazard stage.
- —Relative velocity of the UAV during the intermediate stage.
- —The relative distance between the UAV and the obstacle when the obstacle was initially sensed ( distance).
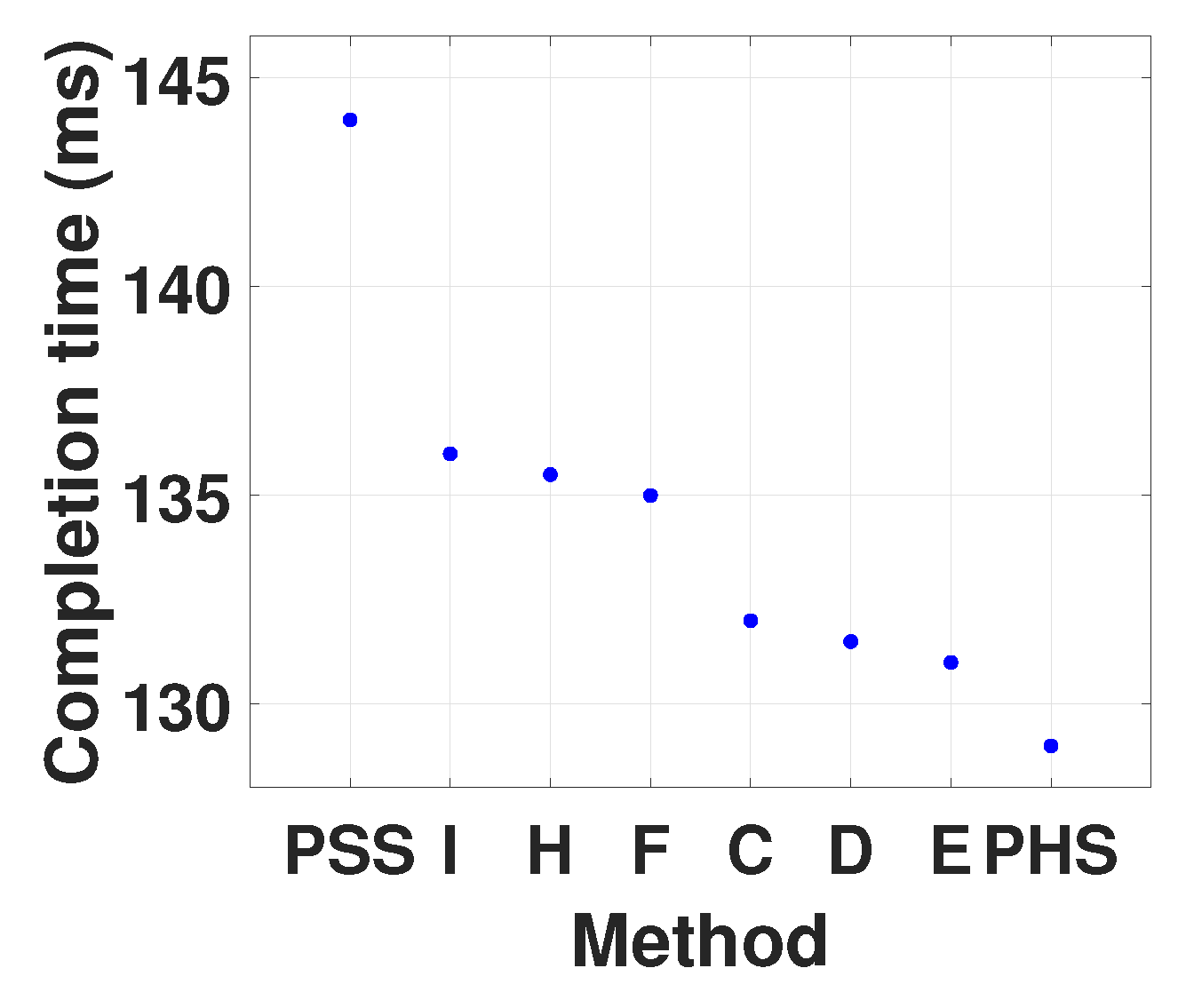
4.4. Comparison of Phs with Pss Method
4.5. Comparison of Phs with Speed and Heading Hybrid Method
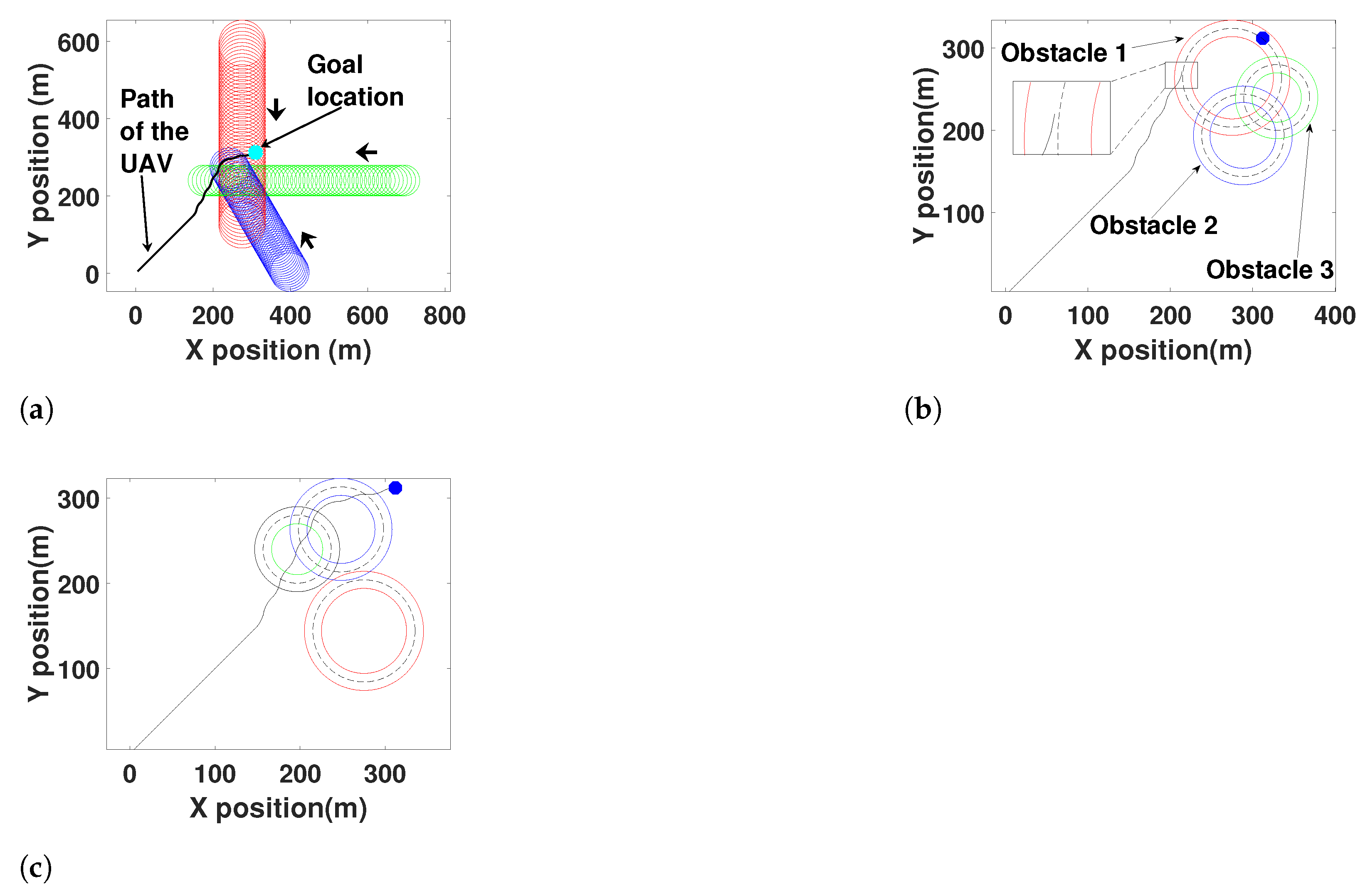
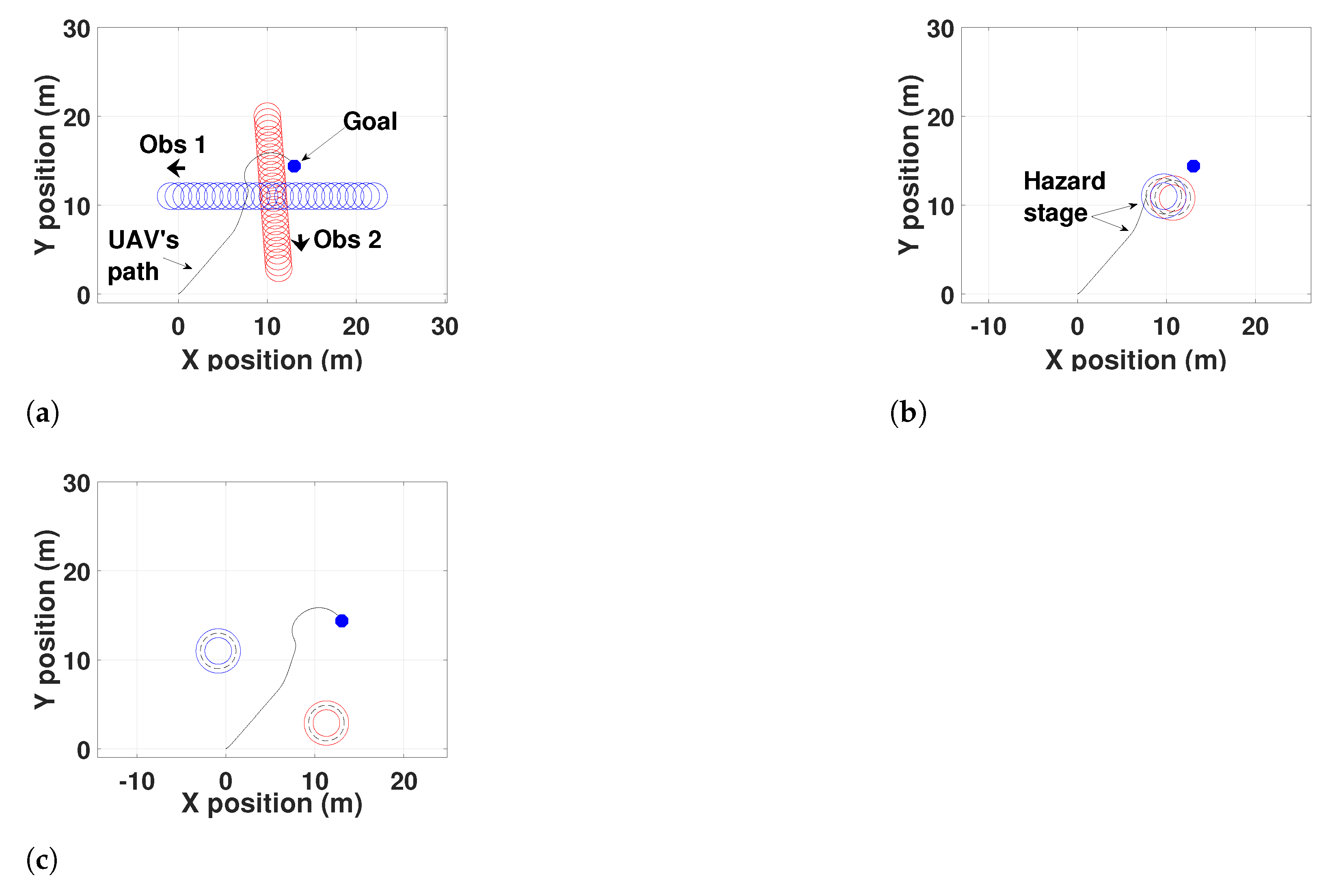
5. Multiple Collision Handling
5.1. Typical Multiple Collision Handling
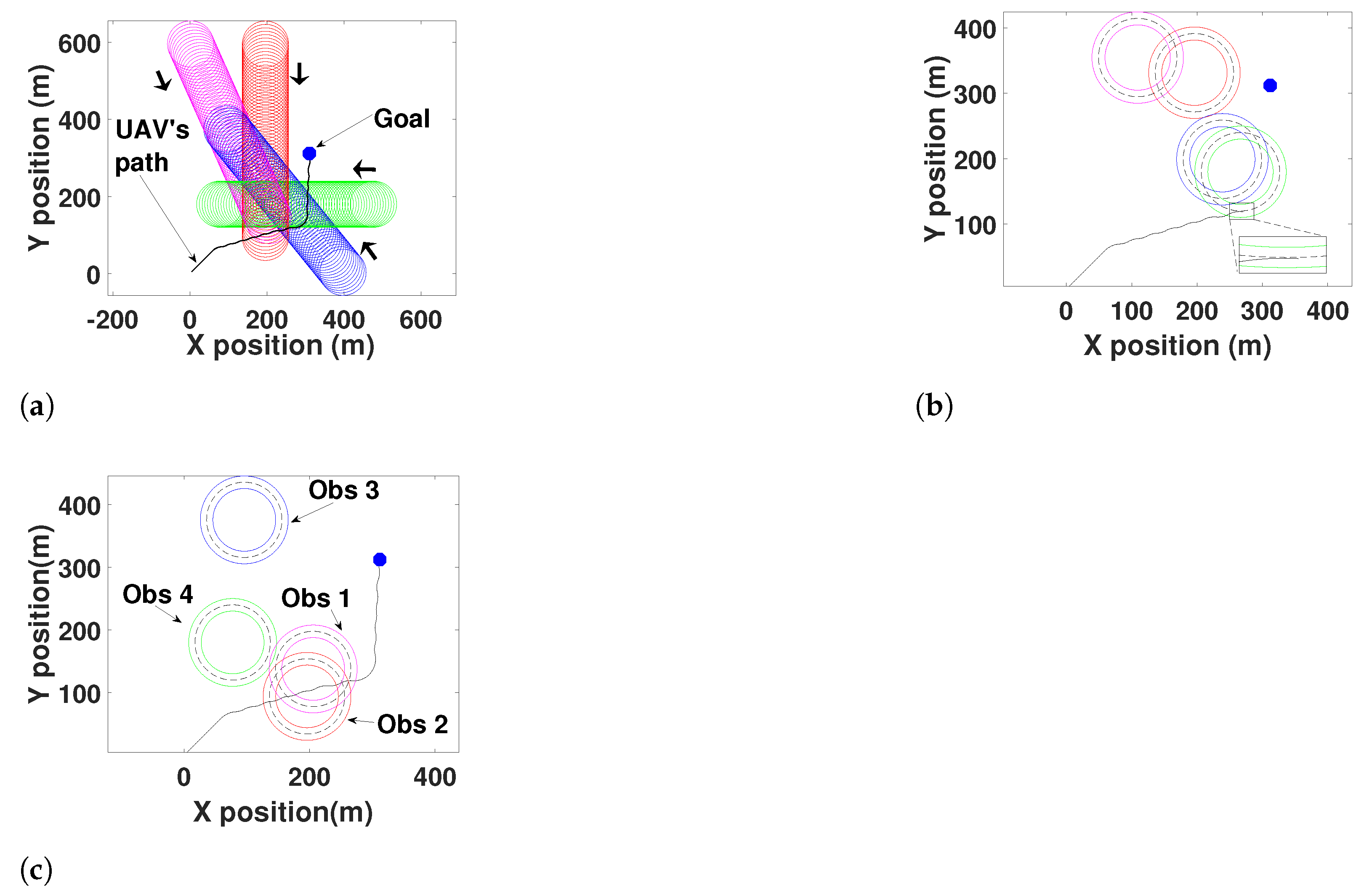
5.2. Complex Multiple Collision Handling
| Algorithm 2 Calculation of in a complex situation. |
| Input: , |
Output:
|
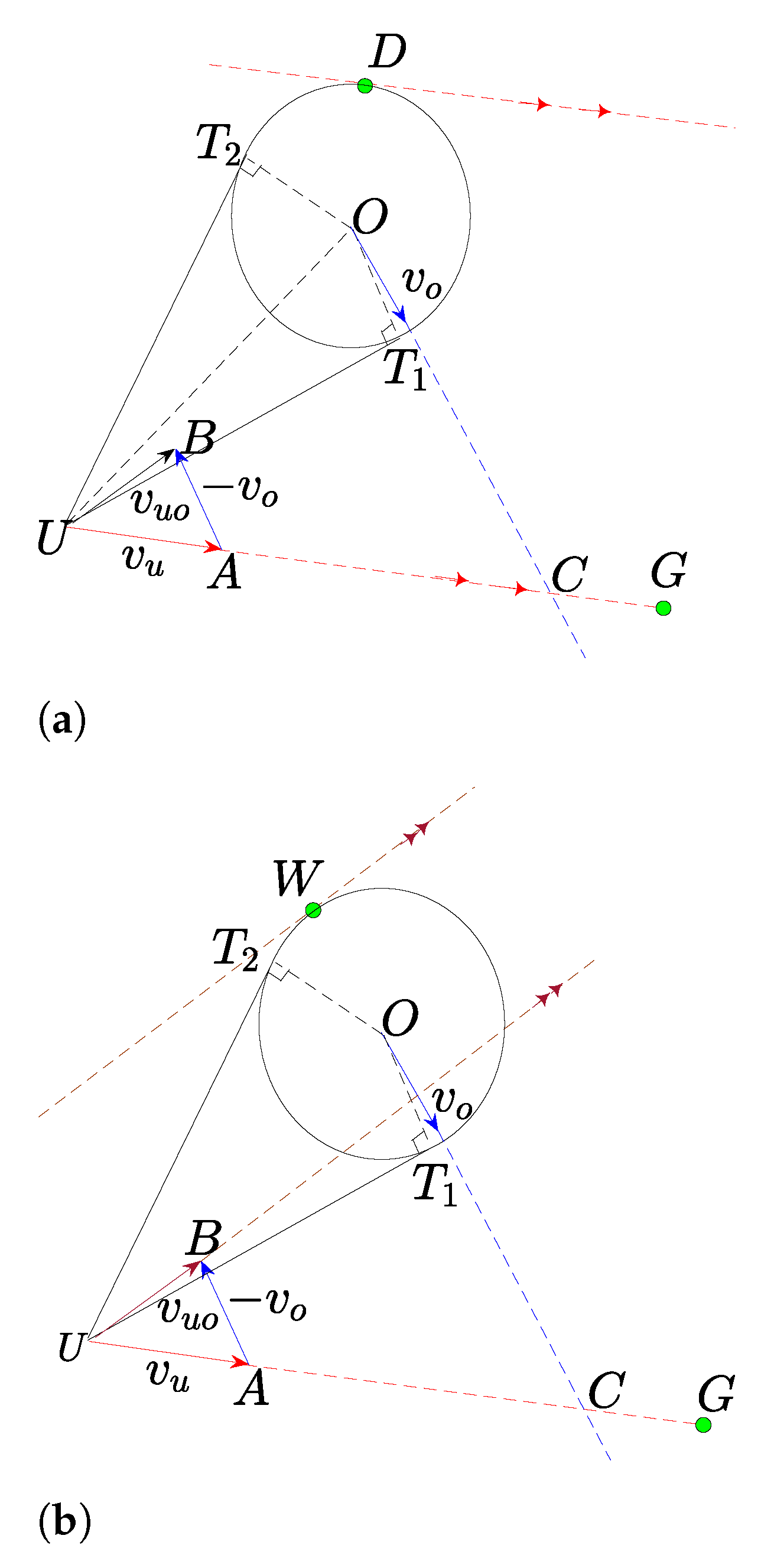
6. Results
6.1. Simulation Results
6.1.1. Simulations Related to Pss Algorithm
6.1.2. Simulations Related to Phs Algorithm
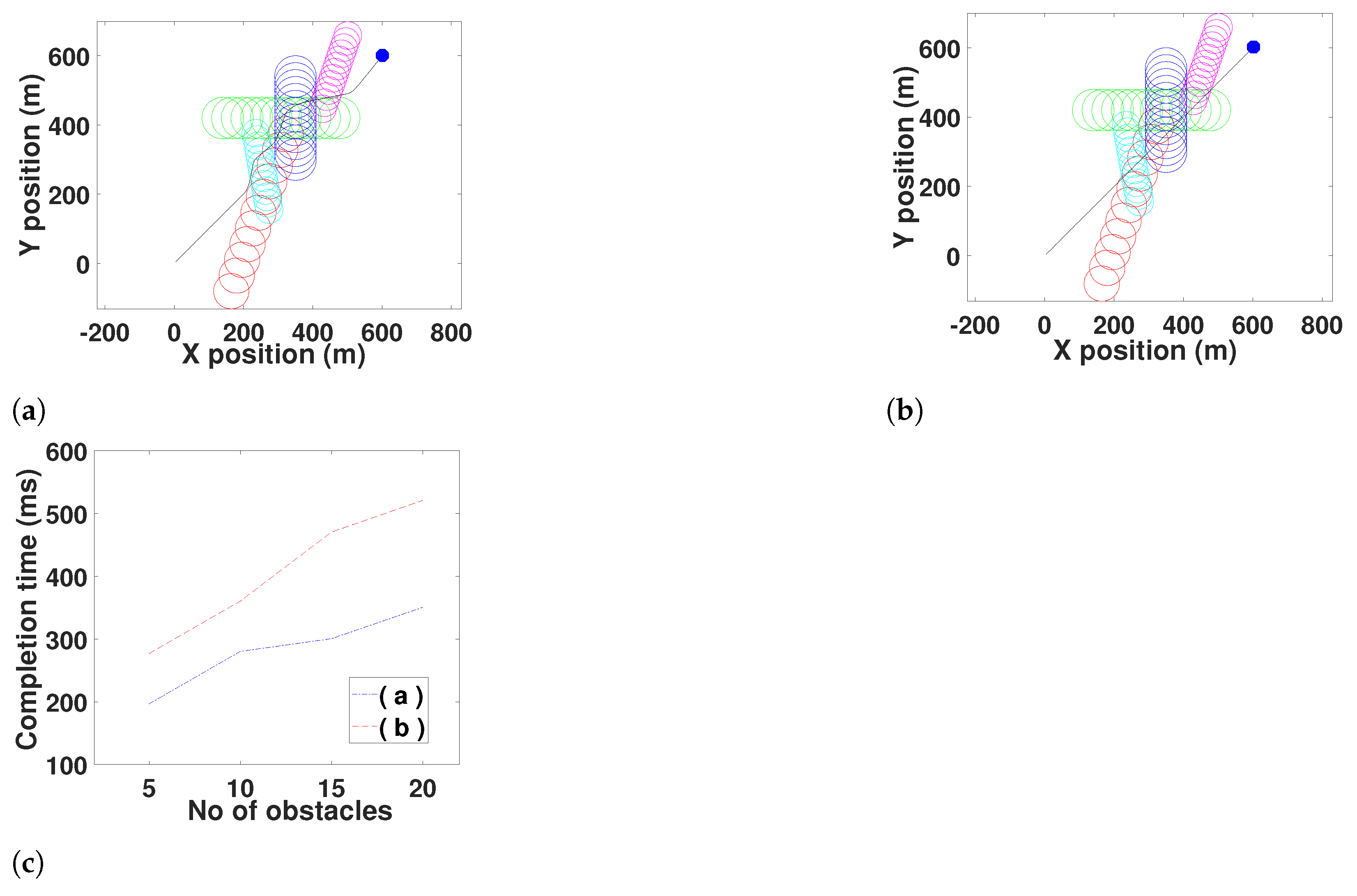
6.1.3. Multiple Collision Avoidance Handing
6.1.4. Complex Collision Avoidance
6.1.5. A Simulation to Justify Theorems 1 and 2
6.1.6. Comparison with Tscc (Time Scaled Collision Cone) Method
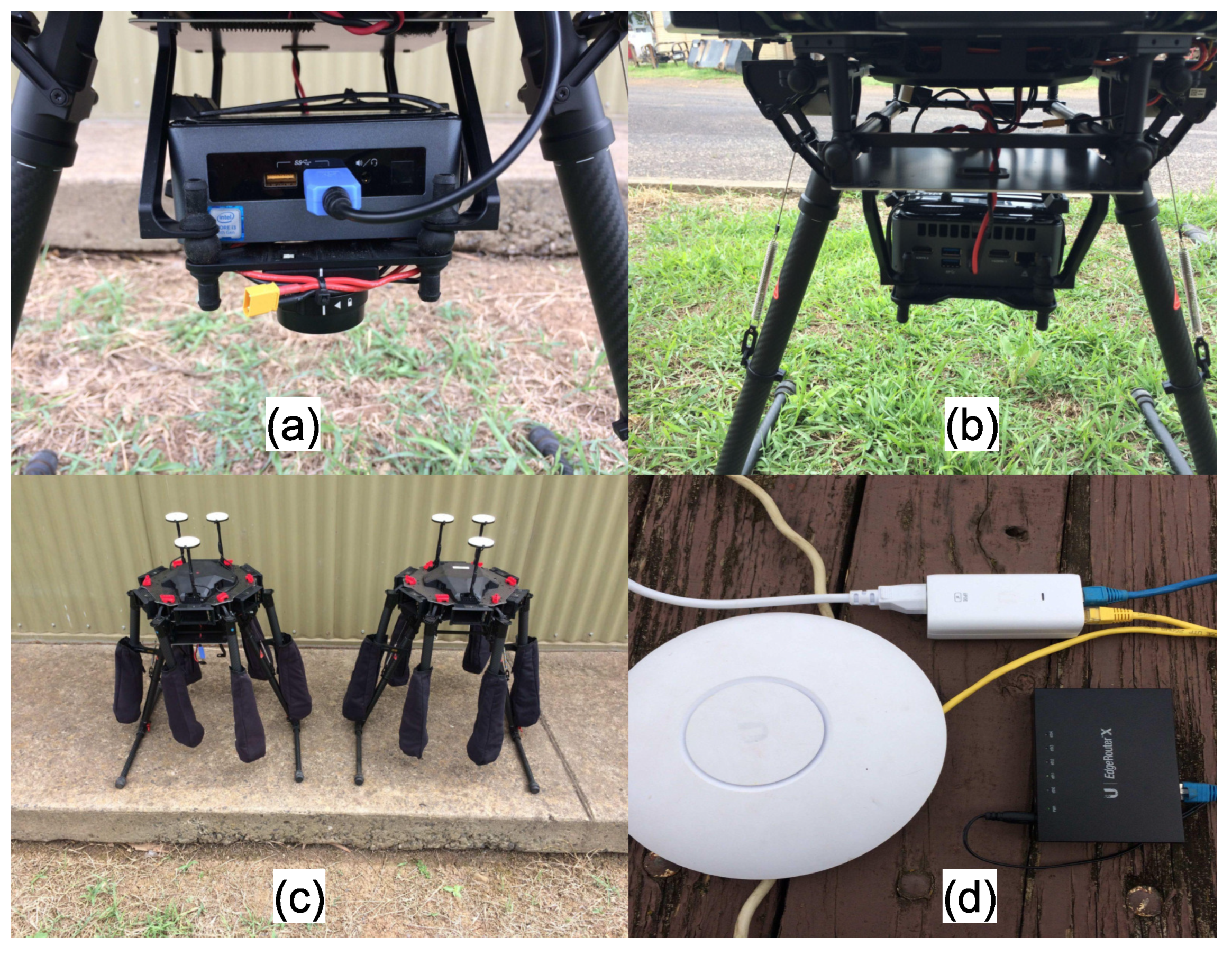
6.2. Experimental Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef] [Green Version]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Stentz, A. Optimal and efficient path planning for partially known environments. In Intelligent Unmanned Ground Vehicles; Springer: Berlin/Heidelberg, Germany, 1997; pp. 203–220. [Google Scholar]
- LaValle, S.M.; Cheng, P. Resolution complete rapidly-exploring random trees. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 267–272. [Google Scholar]
- Borenstein, J.; Koren, Y. The vector field histogram-fast obstacle avoidance for mobile robots. IEEE Trans. Robot. Autom. 1991, 7, 278–288. [Google Scholar] [CrossRef] [Green Version]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef] [Green Version]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Springer: Berlin/Heidelberg, Germany, 1986; pp. 396–404. [Google Scholar]
- Chakravarthy, A.; Ghose, D. Obstacle avoidance in a dynamic environment: A collision cone approach. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 1998, 28, 562–574. [Google Scholar] [CrossRef] [Green Version]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic environments using velocity obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Large, F.; Sckhavat, S.; Shiller, Z.; Laugier, C. Using non-linear velocity obstacles to plan motions in a dynamic environment. In Proceedings of the 7th International Conference on Control, Automation, Robotics and Vision, (ICARCV 2002), Singapore, 2–5 December 2002; IEEE: Piscataway, NJ, USA, 2002; Volume 2, pp. 734–739. [Google Scholar]
- Fulgenzi, C.; Spalanzani, A.; Laugier, C. Dynamic obstacle avoidance in uncertain environment combining PVOs and occupancy grid. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1610–1616. [Google Scholar]
- Kluge, B.; Prassler, E. Reflective navigation: Individual behaviors and group behaviors. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA’04. 2004, New Orleans, LA, USA, 26 April–1 May 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 4, pp. 4172–4177. [Google Scholar]
- Van den Berg, J.; Lin, M.; Manocha, D. Reciprocal velocity obstacles for real-time multi-agent navigation. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1928–1935. [Google Scholar]
- Snape, J.; Van Den Berg, J.; Guy, S.J.; Manocha, D. Independent navigation of multiple mobile robots with hybrid reciprocal velocity obstacles. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 5917–5922. [Google Scholar]
- Guy, S.J.; Chhugani, J.; Kim, C.; Satish, N.; Lin, M.; Manocha, D.; Dubey, P. Clearpath: Highly parallel collision avoidance for multi-agent simulation. In Proceedings of the 2009 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, New Orleans, LA, USA, 1–2 August 2009; pp. 177–187. [Google Scholar]
- Singh, A.K.; Krishna, K.M. Reactive collision avoidance for multiple robots by non linear time scaling. In Proceedings of the 52nd IEEE Conference on Decision and Control, Florence, Italy, 10–13 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 952–958. [Google Scholar]
- Gopalakrishnan, B.; Singh, A.K.; Krishna, K.M. Time scaled collision cone based trajectory optimization approach for reactive planning in dynamic environments. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 4169–4176. [Google Scholar]
- Gnanasekera, M.; Katupitiya, J. A Time Optimal Reactive Collision Avoidance Method for UAVs Based on a Modified Collision Cone Approach. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 25–29 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 5685–5692. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gnanasekera, M.; Katupitiya, J. A Time-Efficient Method to Avoid Collisions for Collision Cones: An Implementation for UAVs Navigating in Dynamic Environments. Drones 2022, 6, 106. https://doi.org/10.3390/drones6050106
Gnanasekera M, Katupitiya J. A Time-Efficient Method to Avoid Collisions for Collision Cones: An Implementation for UAVs Navigating in Dynamic Environments. Drones. 2022; 6(5):106. https://doi.org/10.3390/drones6050106
Chicago/Turabian StyleGnanasekera, Manaram, and Jay Katupitiya. 2022. "A Time-Efficient Method to Avoid Collisions for Collision Cones: An Implementation for UAVs Navigating in Dynamic Environments" Drones 6, no. 5: 106. https://doi.org/10.3390/drones6050106
APA StyleGnanasekera, M., & Katupitiya, J. (2022). A Time-Efficient Method to Avoid Collisions for Collision Cones: An Implementation for UAVs Navigating in Dynamic Environments. Drones, 6(5), 106. https://doi.org/10.3390/drones6050106