
UAV and Structure-From-Motion Photogrammetry Enhance River Restoration Monitoring: A Dam Removal Study



Abstract
:1. Introduction
1.1. Objectives of This Study
- How effective are the UAV-based SfM and ML evaluation methods for detecting ecologically relevant changes throughout the densely vegetated reservoir?
- How does the information acquired via UAV compare to conventional evaluation approaches performed on the ground? Are there advantages and/or drawbacks for each approach?
- How did the reservoir change after the restoration project? For example, did the vegetation structure and channel shape change throughout the reservoir post-dam removal despite its pre-removal vegetated state and existing seasonal channel? If so, how, and what were the spatial extent of these changes?
1.2. Dam Removal Impacts
1.3. Emerging UAV-Based River Restoration Monitoring Approaches
2. Materials and Methods
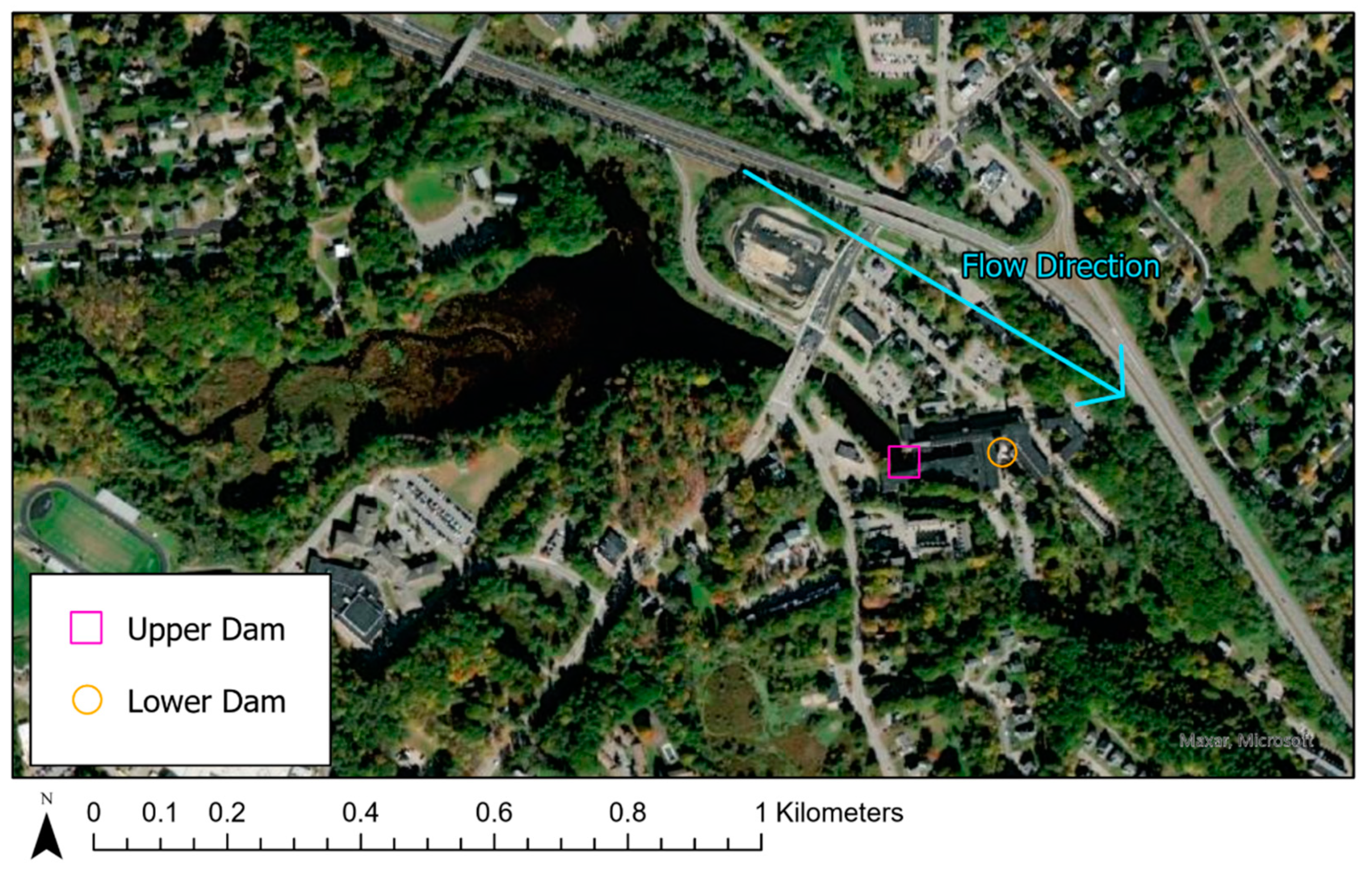
2.1. Study Setting Background: The Sawyer Mill Dam Removals
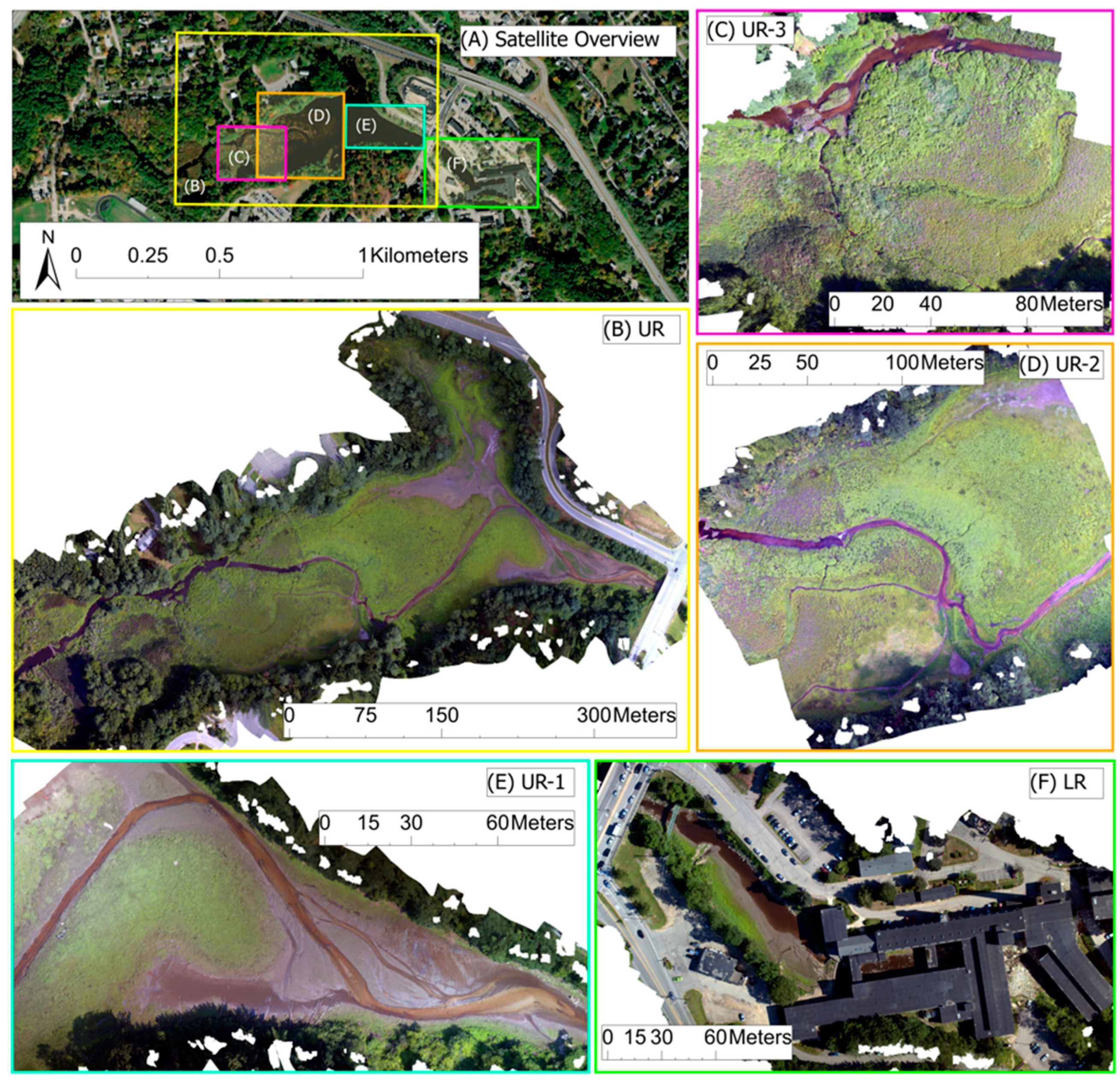
2.2. Study Areas
2.3. Fieldwork
2.3.1. UAV Flights
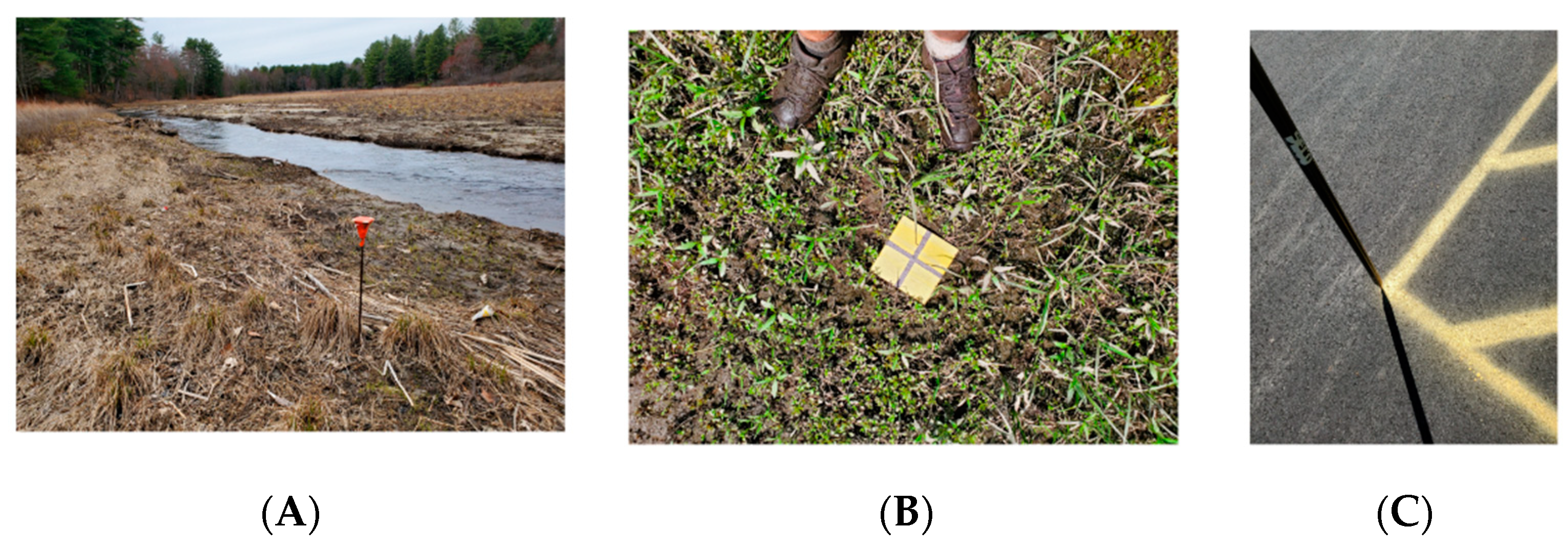
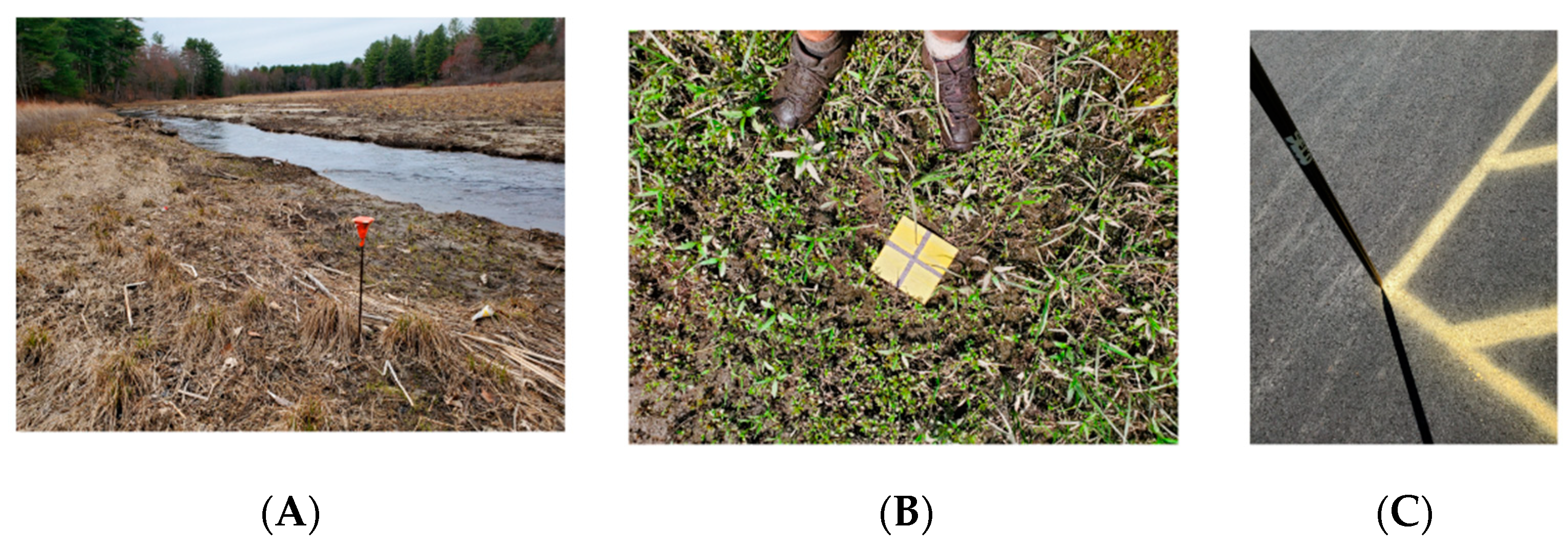
2.3.2. Topographic Measurements
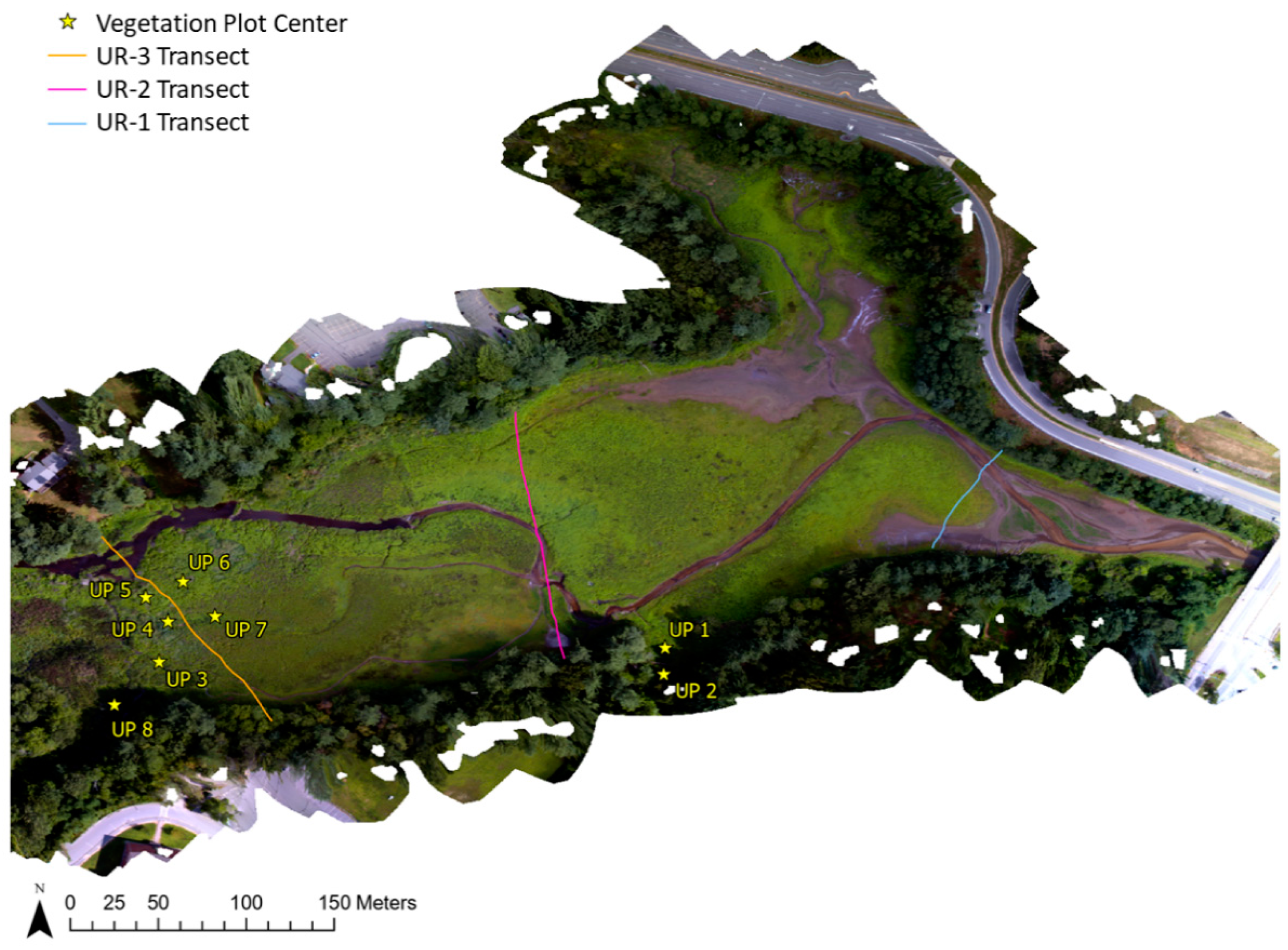
2.3.3. Vegetation Plots
2.4. Structure from Motion
2.5. Evaluating the Z Accuracy of the DSMs by Terrain Type
2.6. Classifying Vegetation Structure
2.6.1. Classification Methodology and Thematic Accuracy
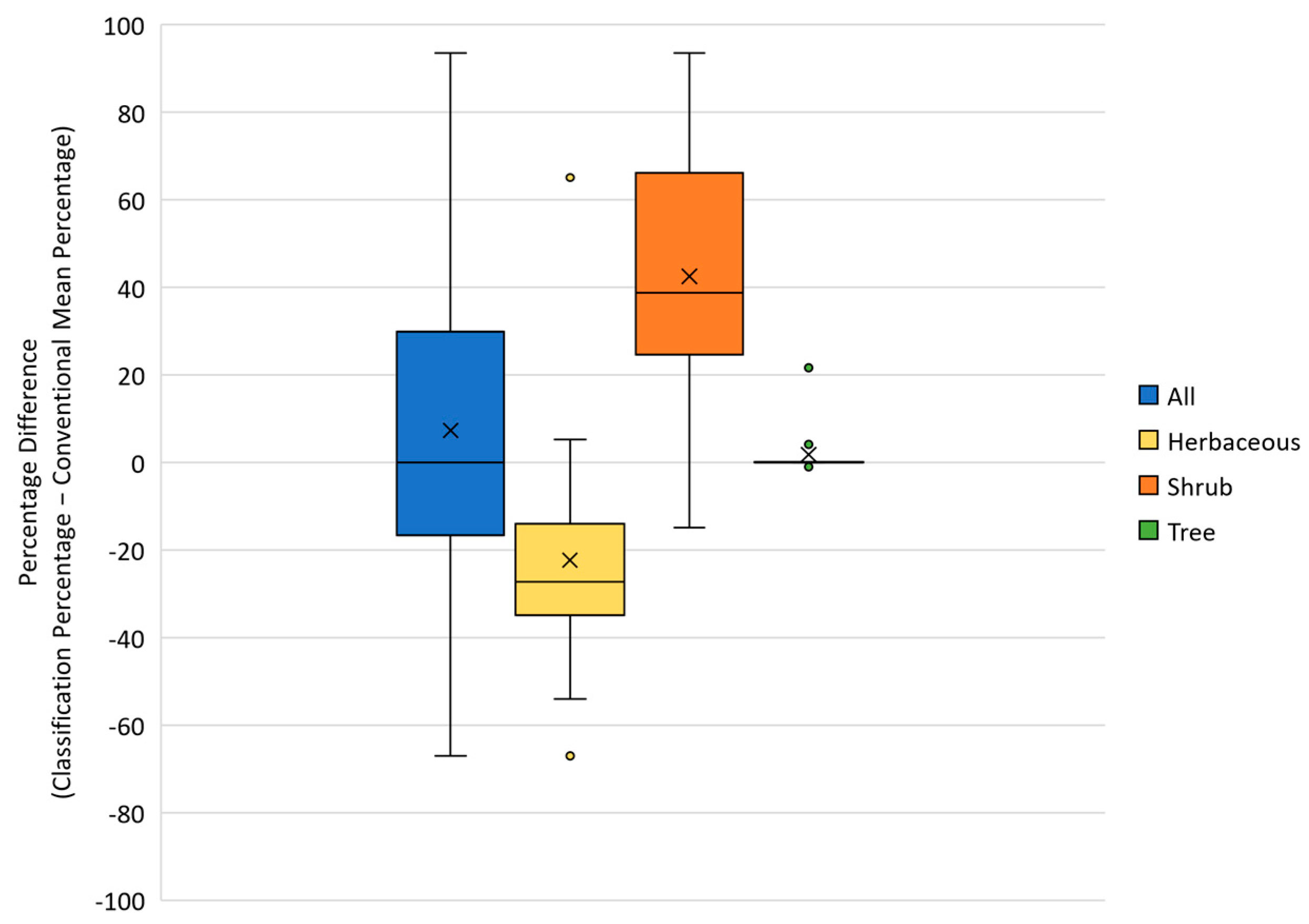
2.6.2. Landscape-Level Results and Comparison to Boots-on-Ground Vegetation Plot Data
2.7. Mapping and Quantifying Geomorphic Change
2.7.1. Creating DSMs of Difference and Vegetation Masks
2.7.2. Adding Minimum Level of Detection Threshold Masks
2.7.3. Calculating Volume Changes within Geomorphic Assessment Areas
3. Results
3.1. UAV Model Topographic Accuracy
3.1.1. GCP- and VCP-Based Topographic Accuracy Metrics from PhotoScan
3.1.2. CP-Based Z Accuracy Evaluation by Terrain Type
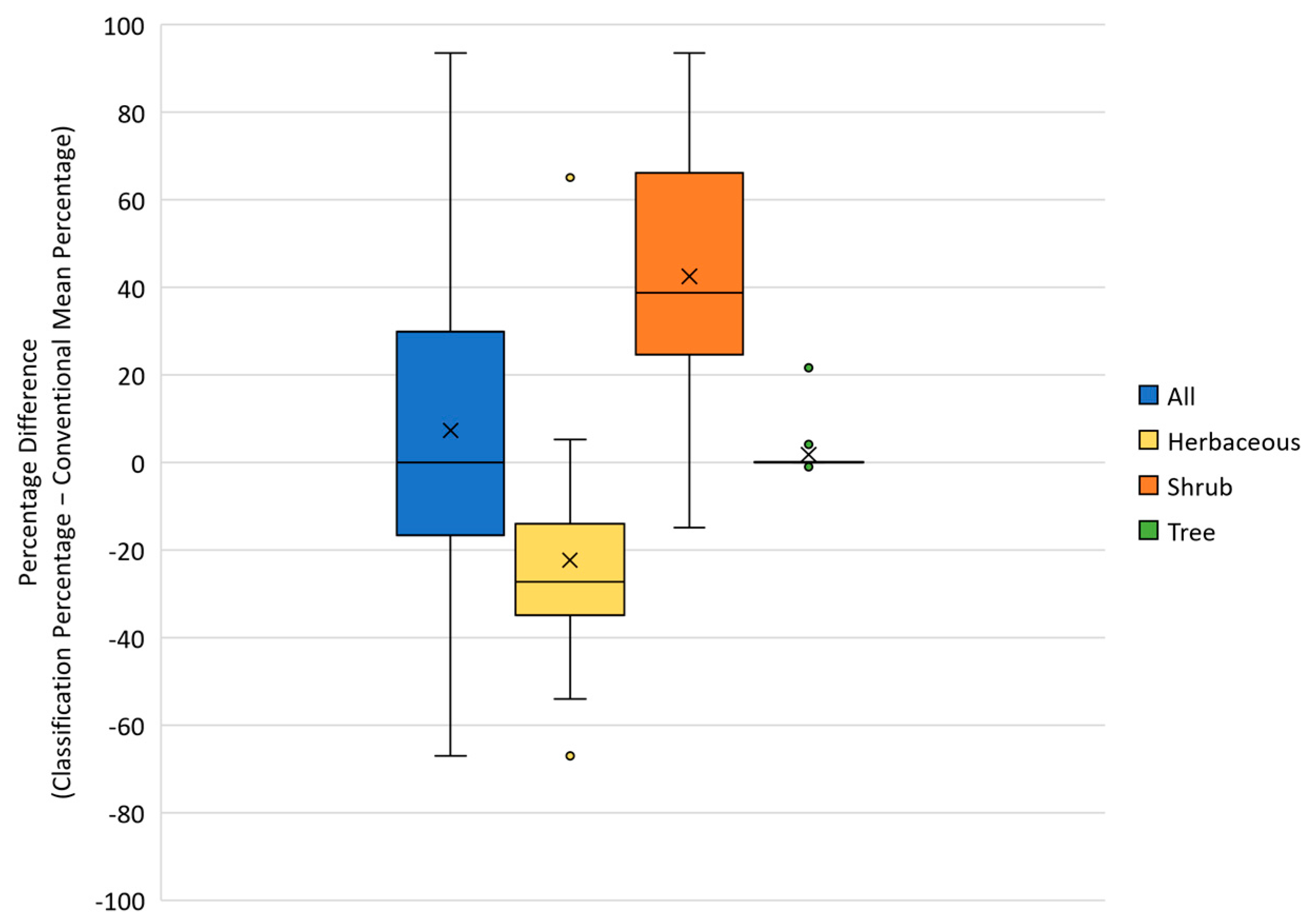
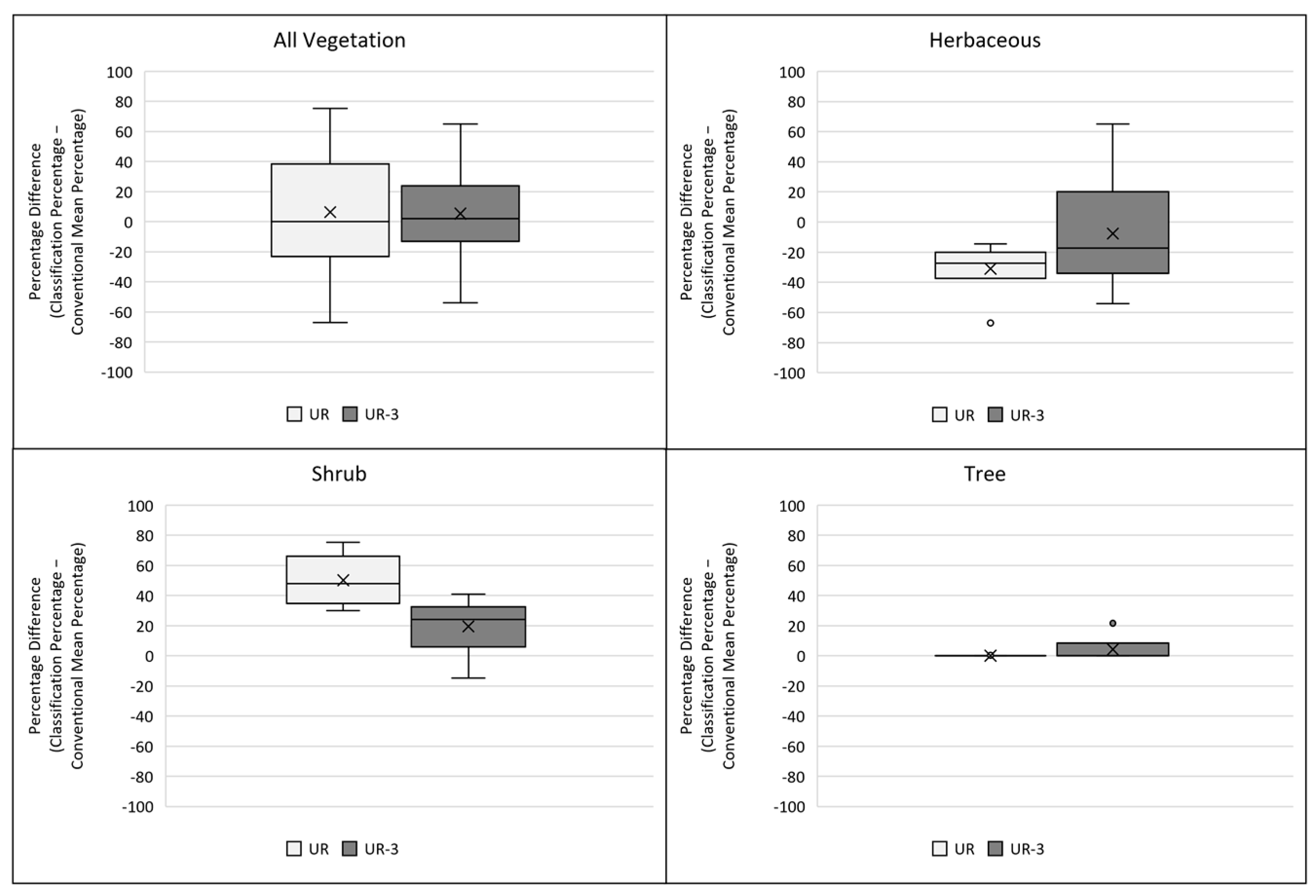
3.2. Boots-on-Ground Vegetation Plot Data vs. UAV Classified Vegetation Cover
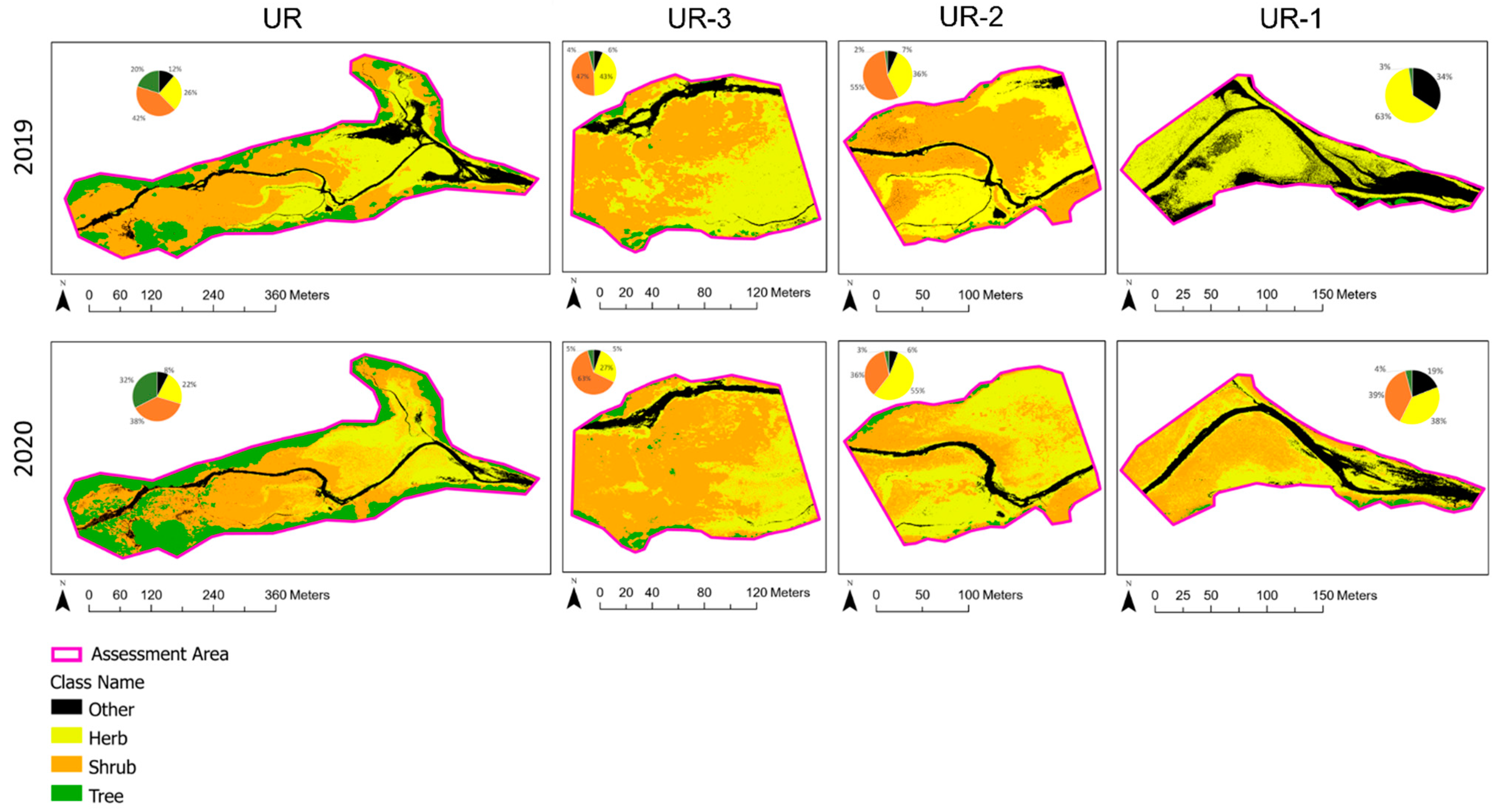
3.3. Landscape-Level UAV Vegetation Structure Cover Results
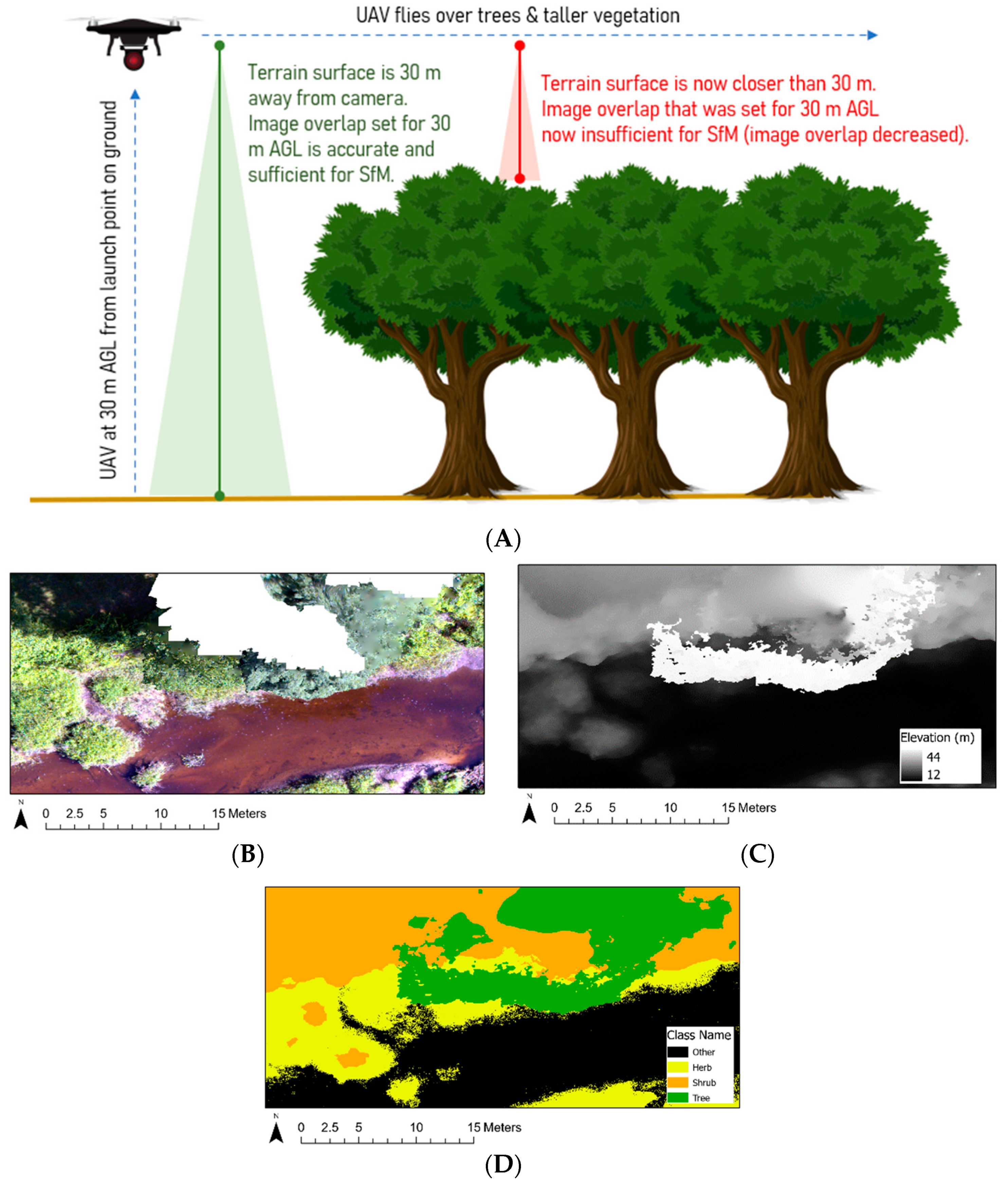
3.3.1. Landscape-Level Vegetation Maps Pre-/Post-Restoration and Complications
3.3.2. Thematic Accuracy of Vegetation Classification Results
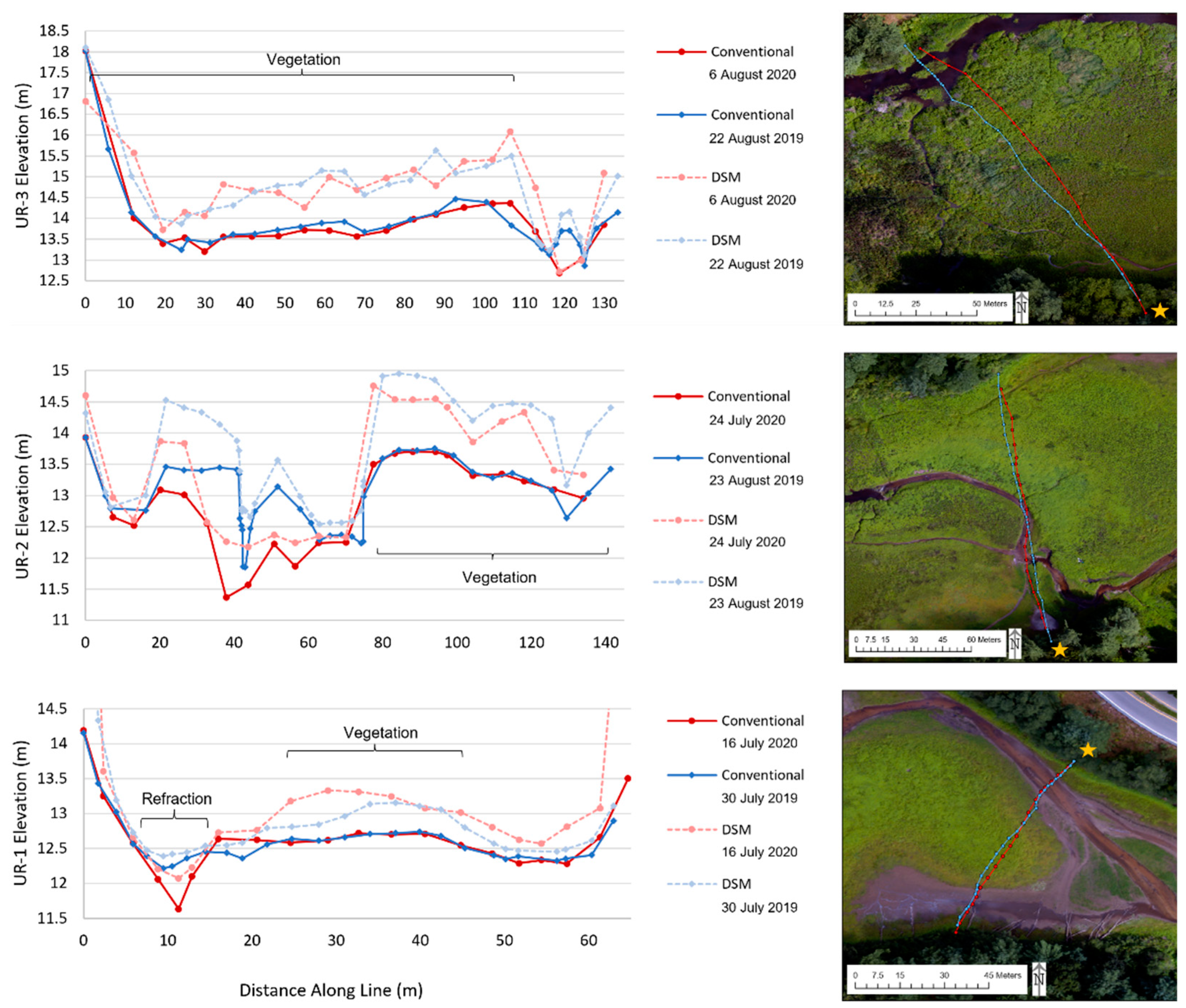
3.4. Boots-on-Ground Transects vs. UAV DSMs for Evaluating Post-Restoration Channel Changes
3.5. Landscape-Level UAV Geomorphic Change Results
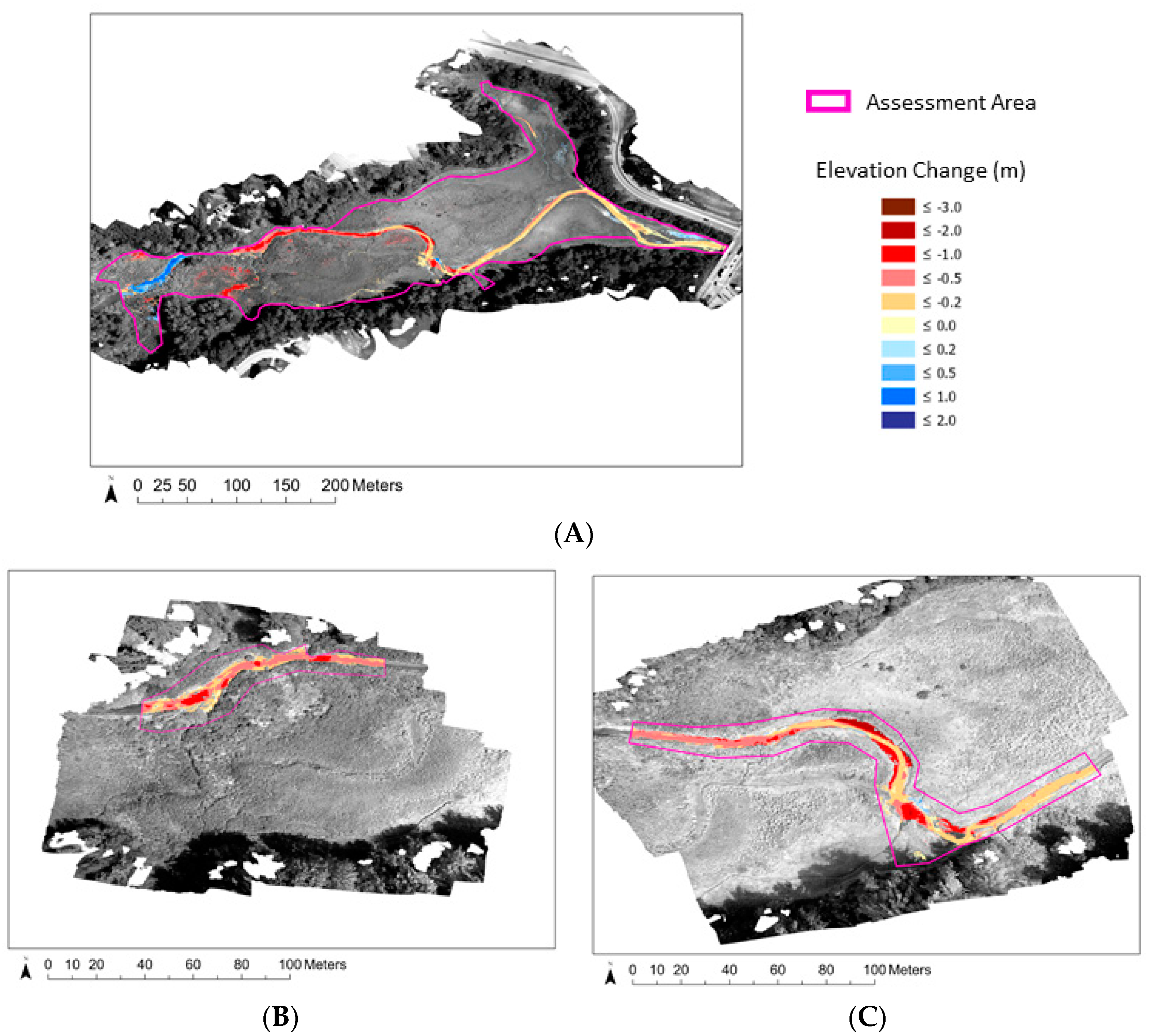
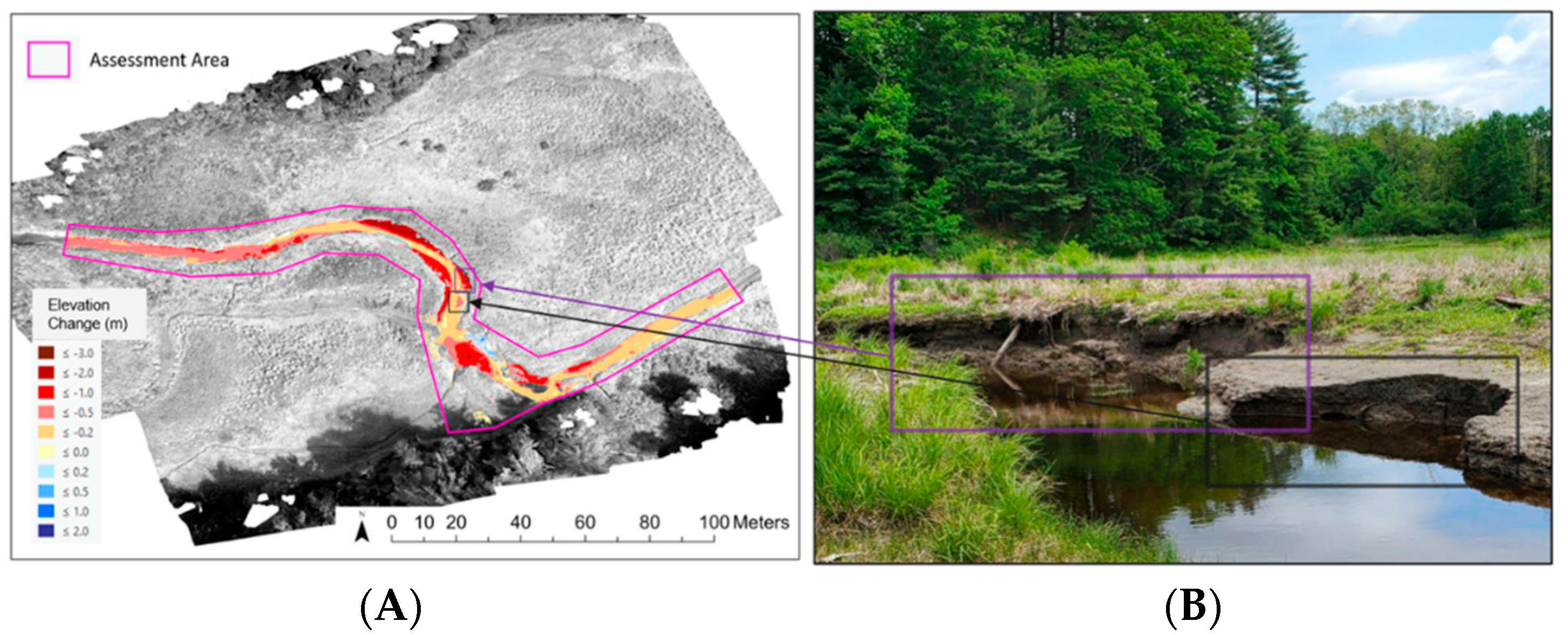
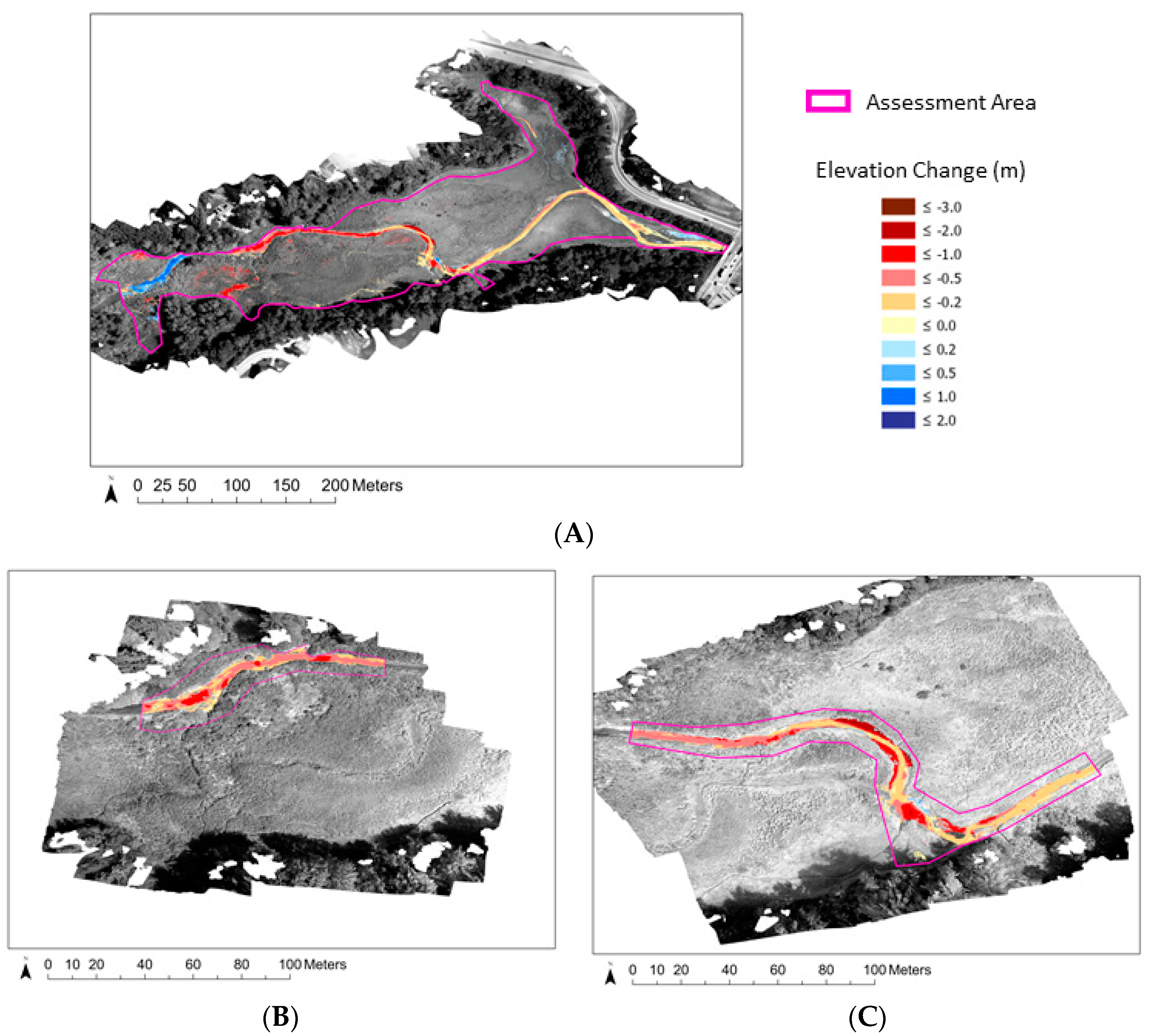
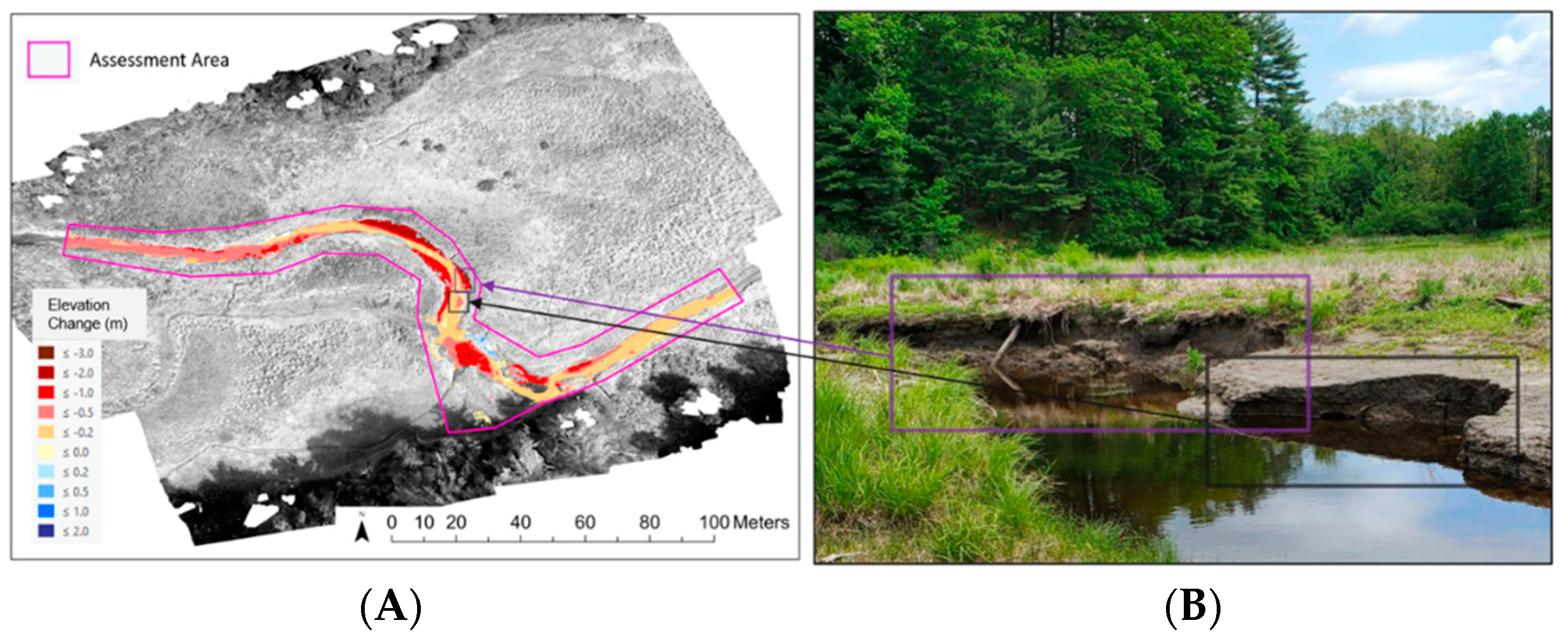
3.5.1. Post-Restoration Erosion and Deposition Mapped from Masked DoDs
3.5.2. Post-Restoration Volume Changes within Geomorphic Assessment Areas
4. Discussion
4.1. Differences in UAV Model Topographic Accuracy across Terrain Types
4.2. Landscape-Level UAV Vegetation Structure Assessment
4.2.1. Thematic Accuracy Metrics Indicated Reliable Results
4.2.2. UAV Captured Post-Restoration Changes Such as Vegetation Colonization and Succession
4.2.3. UAV Flight Date Differences Could Have Impacted Observed Changes
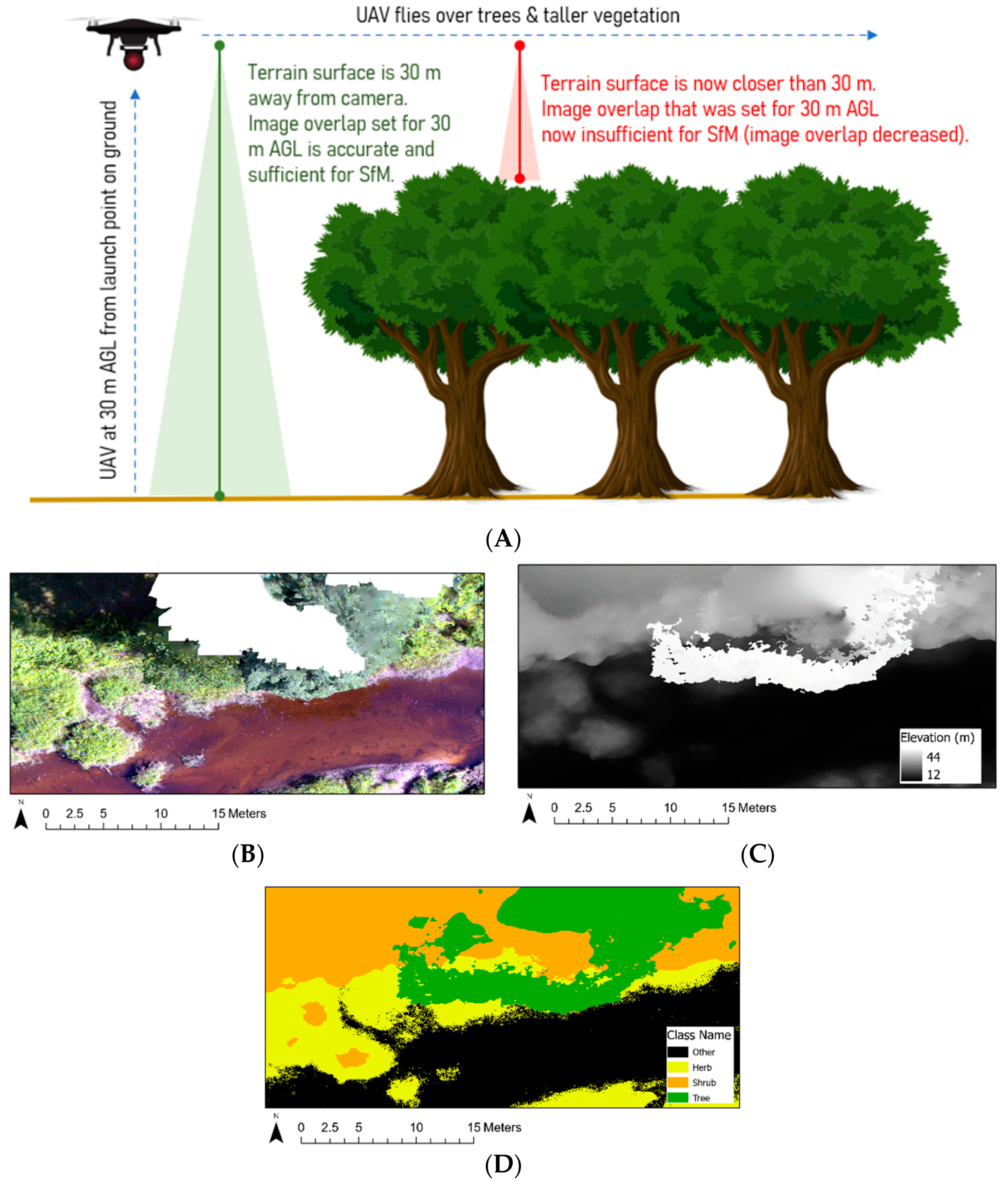
4.2.4. Considerations of Local Distortions in Canopy Cover
4.3. Comparing the Boots-on-Ground and UAV-Based Approaches for Vegetation Cover Assessment
4.3.1. UAV Provided a More Complete Perspective Than Spatially Limited Plots
4.3.2. Limitations of Using a Passive Sensor vs. Boots-on-Ground Investigation
4.3.3. Classification Results from Lower-Flying-Height and Spatially Concentrated Training Samples Better Matched Plot Data
4.4. Landscape-Level UAV Geomorphic Assessment
4.4.1. UAV Captured Post-Restoration Changes Such as Changes in Channel Shape and Reservoir-Level Patterns of Erosion and Deposition
4.4.2. Trade-Offs of Not Using a Refraction Correction
4.5. Comparing the Boots-on-Ground and UAV-Based Approaches for Geomorphic Assessment
4.5.1. UAV Provided More Reliable Results for Detecting Geomorphic Change in Hard-to-Navigate Terrain
4.5.2. UAV Estimate of Volume Change vs. Contractor’s Estimate
4.5.3. Vegetation Masks vs. Topographic Measurements of the Ground
4.6. Opportunities for Future Work
4.6.1. Obstacles to Implementing DSM Refraction Correction
4.6.2. Other ML Algorithm and Featureset Combinations for Classifying Vegetation
4.6.3. Spatially Variable Error in DoDs
4.6.4. “Doming” of DSMs
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Conventional Vegetation Plot Cover Classes and Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cover Class | Range (%) | Mean (%) |
|---|---|---|
| T | 0.1–0.9 * | 0.5 * |
| 1 | 1–5 | 3 |
| 2 | 6–15 | 10.5 |
| 3 | 16–25 | 20.5 |
| 4 | 26–50 | 38 |
| 5 | 51–75 | 63 |
| 6 | 76–95 | 85.5 |
| 7 | 96–100 | 98 |
| Plot Name | Vegetation Structure Type | Vegetation Total Coverage Range (%) | Vegetation Total Coverage Mean (%) * |
|---|---|---|---|
| Up 1 | Herbaceous | 35.5–69.5 | 52.5 |
| Shrub | 2.1–10.9 | 6.5 | |
| Tree | 0.1–0.9 | 0.5 | |
| Up 2 | Herbaceous | 14.4–43.6 | 29 |
| Shrub | 1.4–8.6 | 5 | |
| Tree | 14–40 | 27 | |
| Up 3 | Herbaceous | 11.4–43.6 | 27.5 |
| Shrub | 10.1–35.9 | 23 | |
| Tree | 0 | 0 | |
| Up 4 | Herbaceous | 13.6–40.4 | 27 |
| Shrub | 34.2–61.8 | 48 | |
| Tree | 0 | 0 | |
| Up 5 | Herbaceous | 9.5–34.5 | 22 |
| Shrub | 39.6–100.4 | 70 | |
| Tree | 0 | 0 | |
| Up 6 | Herbaceous | 11.4–43.6 | 27.5 |
| Shrub | 42–85 | 63.5 | |
| Tree | 0 | 0 | |
| Up 7 | Herbaceous | 4.5–24.5 | 14.5 |
| Shrub | 19.3–52.7 | 36 | |
| Tree | 0 | 0 | |
| Up 8 | Herbaceous | 37.7–96.3 | 67 |
| Shrub | 34.2–76.8 | 55.5 | |
| Tree | 0.1–0.9 | 0.5 |
Appendix B. Vegetation Classification Confusion Matrices
| Class Value | Other | Herb | Shrub | Tree | Total | U Accuracy | Kappa |
| Other | 500 | 1 | 0 | 0 | 501 | 0.998 | |
| Herb | 0 | 499 | 0 | 27 | 526 | 0.948 | |
| Shrub | 0 | 0 | 500 | 0 | 500 | 1 | |
| Tree | 0 | 0 | 0 | 473 | 473 | 1 | |
| Total | 500 | 500 | 500 | 500 | 2000 | ||
| P Accuracy | 1 | 0.998 | 1 | 0.946 | 0.986 | ||
| Kappa | 0.981 |
| Class Value | Other | Herb | Shrub | Tree | Total | U Accuracy | Kappa |
| Other | 500 | 0 | 0 | 0 | 500 | 1 | |
| Herb | 0 | 465 | 121 | 0 | 586 | 0.793 | |
| Shrub | 0 | 35 | 379 | 0 | 414 | 0.915 | |
| Tree | 0 | 0 | 0 | 500 | 500 | 1 | |
| Total | 500 | 500 | 500 | 500 | 2000 | ||
| P Accuracy | 1 | 0.93 | 0.758 | 1 | 0.922 | ||
| Kappa | 0.896 |
| Class Value | Other | Herb | Shrub | Tree | Total | U Accuracy | Kappa |
| Other | 500 | 0 | 0 | 0 | 500 | 1 | |
| Herb | 0 | 500 | 31 | 2 | 533 | 0.938 | |
| Shrub | 0 | 0 | 469 | 0 | 469 | 1 | |
| Tree | 0 | 0 | 0 | 498 | 498 | 1 | |
| Total | 500 | 500 | 500 | 500 | 2000 | ||
| P Accuracy | 1 | 1 | 0.938 | 0.996 | 0.983 | ||
| Kappa | 0.978 |
| Class Value | Other | Herb | Shrub | Tree | Total | U Accuracy | Kappa |
| Other | 499 | 1 | 0 | 0 | 500 | 0.998 | |
| Herb | 1 | 332 | 133 | 0 | 466 | 0.712 | |
| Shrub | 0 | 167 | 324 | 0 | 491 | 0.659 | |
| Tree | 0 | 0 | 43 | 500 | 543 | 0.920 | |
| Total | 500 | 500 | 500 | 500 | 2000 | ||
| P Accuracy | 0.998 | 0.664 | 0.648 | 1 | 0.827 | ||
| Kappa | 0.77 |
| Class Value | Other | Herb | Shrub | Tree | Total | U Accuracy | Kappa |
| Other | 500 | 2 | 0 | 0 | 502 | 0.996 | |
| Herb | 0 | 334 | 0 | 0 | 334 | 1 | |
| Shrub | 0 | 164 | 500 | 0 | 664 | 0.753 | |
| Tree | 0 | 0 | 0 | 500 | 500 | 1 | |
| Total | 500 | 500 | 500 | 500 | 2000 | ||
| P Accuracy | 1 | 0.668 | 1 | 1 | 0.917 | ||
| Kappa | 0.889 |
| Class Value | Other | Herb | Shrub | Tree | Total | U Accuracy | Kappa |
| Other | 500 | 0 | 0 | 0 | 500 | 1 | |
| Herb | 0 | 489 | 0 | 0 | 489 | 1 | |
| Shrub | 0 | 11 | 500 | 8 | 519 | 0.963 | |
| Tree | 0 | 0 | 0 | 492 | 492 | 1 | |
| Total | 500 | 500 | 500 | 500 | 2000 | ||
| P Accuracy | 1 | 0.978 | 1 | 0.984 | 0.99 | ||
| Kappa | 0.987 |
| Class Value | Other | Herb | Tree | Total | U Accuracy | Kappa |
| Other | 500 | 0 | 0 | 500 | 1 | |
| Herb | 0 | 500 | 0 | 500 | 1 | |
| Tree | 0 | 0 | 500 | 500 | 1 | |
| Total | 500 | 500 | 500 | 1500 | ||
| P Accuracy | 1 | 1 | 1 | 1 | ||
| Kappa | 1 |
| Class Value | Other | Herb | Shrub | Tree | Total | U Accuracy | Kappa |
| Other | 499 | 0 | 0 | 0 | 499 | 1 | |
| Herb | 1 | 373 | 90 | 0 | 464 | 0.803 | |
| Shrub | 0 | 127 | 410 | 0 | 537 | 0.763 | |
| Tree | 0 | 0 | 0 | 500 | 500 | 1 | |
| Total | 500 | 500 | 500 | 500 | 2000 | ||
| P Accuracy | 0.998 | 0.746 | 0.82 | 1 | 0.891 | ||
| Kappa | 0.854 |
References
- Collins, M.; Lucey, K.; Lambert, B.; Kachmar, J.; Turek, J.; Hutchins, E.; Purinton, T.; Neils, D. Stream Barrier Removal Monitoring Guide. Gulf Maine Counc. Mar. Environ. 2007, 85. Available online: https://t2.unh.edu/sites/t2.unh.edu/files/documents/publications/Stream-Barrier-Removal-Monitoring-Guide-12-19-07.pdf (accessed on 10 March 2022).
- Foley, M.M.; Bellmore, J.; O’Connor, J.E.; Duda, J.J.; East, A.E.; Grant, G.; Anderson, C.W.; Bountry, J.A.; Collins, M.J.; Connolly, P.J.; et al. Dam Removal: Listening In. Water Resour. Res. 2017, 53, 5229–5246. [Google Scholar] [CrossRef]
- Kibler, K.M.; Tullos, D.D.; Kondolf, G.M. Learning from Dam Removal Monitoring: Challenges to Selecting Experimental Design and Establishing Significance of Outcomes. River Res. Appl. 2011, 27, 967–975. [Google Scholar] [CrossRef]
- Hart, D.D.; Johnson, T.E.; Bushaw-Newton, K.L.; Horwitz, R.J.; Bednarek, A.T.; Charles, D.F.; Kreeger, D.A.; Velinsky, D.J. Dam Removal: Challenges and Opportunities for Ecological Research and River Restoration. BioScience 2002, 52, 669–682. [Google Scholar] [CrossRef]
- Poff, N.L.; Hart, D.D. How Dams Vary and Why It Matters for the Emerging Science of Dam Removal. BioScience 2002, 52, 659–668. [Google Scholar] [CrossRef] [Green Version]
- Tullos, D.D.; Collins, M.J.; Bellmore, J.R.; Bountry, J.A.; Connolly, P.J.; Shafroth, P.B.; Wilcox, A.C. Synthesis of Common Management Concerns Associated with Dam Removal. JAWRA J. Am. Water Resour. Assoc. 2016, 52, 1179–1206. [Google Scholar] [CrossRef]
- Roni, P.; Beechie, T. Stream and Watershed Restoration: A Guide to Restoring Riverine Processes and Habitats; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Bernhardt, E.S.; Palmer, M.A.; Allan, J.; Alexander, G.; Barnas, K.; Brooks, S.; Carr, J.; Clayton, S.; Dahm, C.; Follstad-Shah, J.; et al. Synthesizing US River Restoration Efforts. Science 2005, 308, 636–637. [Google Scholar] [CrossRef]
- National Research Council; Division on Earth and Life Studies; Commission on Geosciences, Environment and Resources; Committee on Restoration of Aquatic Ecosystems: Science, Technology, and Public Policy. Restoration of Aquatic Ecosystems: Science, Technology, and Public Policy; National Academies Press: Washington, DC, USA, 1992. [Google Scholar]
- Doyle, M.W.; Stanley, E.H.; Orr, C.H.; Selle, A.R.; Sethi, S.A.; Harbor, J.M. Stream Ecosystem Response to Small Dam Removal: Lessons from the Heartland. Geomorphology 2005, 71, 227–244. [Google Scholar] [CrossRef]
- MacBroom, J.G. Channel Evolution Upstream of Dam Removal Sites. In Sediment Dynamics upon Dam Removal; American Society of Civil Engineers: Reston, VA, USA, 2009; pp. 67–81. [Google Scholar]
- Doyle, M.W.; Stanley, E.H.; Harbor, J.M. Channel Adjustments Following Two Dam Removals in Wisconsin. Water Resour. Res. 2003, 39, 1011. [Google Scholar] [CrossRef]
- Pizzuto, J. Effects of Dam Removal on River Form and Process. BioScience 2002, 52, 683–691. [Google Scholar] [CrossRef] [Green Version]
- Orr, C.H. Patterns of Removal and Ecological Response: A Study of Small Dams in Wisconsin. Master’s Thesis, University of Wisconsin—Madison, Madison, WI, USA, 2002. [Google Scholar]
- Shafroth, P.B.; Stromberg, J.C.; Patten, D.T. Riparian Vegetation Response to Altered Disturbance and Stress Regimes. Ecol. Appl. 2002, 12, 107–123. [Google Scholar] [CrossRef]
- Orr, C.H.; Stanley, E.H. Vegetation Development and Restoration Potential of Drained Reservoirs Following Dam Removal in Wisconsin. River Res. Appl. 2006, 22, 281–295. [Google Scholar] [CrossRef]
- Gurnell, A. Plants as River System Engineers. Earth Surf. Process. Landf. 2014, 39, 4–25. [Google Scholar] [CrossRef]
- Smith, D.G. Effect of Vegetation on Lateral Migration of Anastomosed Channels of a Glacier Meltwater River. Geol. Soc. Am. Bull. 1976, 87, 857–860. [Google Scholar] [CrossRef]
- Polvi, L.E.; Wohl, E. Biotic Drivers of Stream Planform: Implications for Understanding the Past and Restoring the Future. BioScience 2013, 63, 439–452. [Google Scholar] [CrossRef] [Green Version]
- Rood, S.B.; Samuelson, G.M.; Braatne, J.H.; Gourley, C.R.; Hughes, F.M.; Mahoney, J.M. Managing River Flows to Restore Floodplain Forests. Front. Ecol. Environ. 2005, 3, 193–201. [Google Scholar] [CrossRef]
- Kim, S.; Toda, Y.; Tsujimoto, T. Geomorphological and Riparian Vegetation Responses Following a Low-Head Dam Removal: A Study Based on Literature Review. Int. J. River Basin Manag. 2015, 13, 315–324. [Google Scholar] [CrossRef]
- Cannatelli, K.M.; Curran, J.C. Importance of Hydrology on Channel Evolution Following Dam Removal: Case Study and Conceptual Model. J. Hydraul. Eng. 2012, 138, 377–390. [Google Scholar] [CrossRef]
- Bednarek, A.T. Undamming Rivers: A Review of the Ecological Impacts of Dam Removal. Environ. Manag. 2001, 27, 803–814. [Google Scholar] [CrossRef]
- MacBroom, J.; Schiff, R. Sediment Management at Small Dam Removal Sites. Rev. Eng. Geol. 2013, 21, 67–79. [Google Scholar]
- Sawaske, S.R.; Freyberg, D.L. A Comparison of Past Small Dam Removals in Highly Sediment-Impacted Systems in the US. Geomorphology 2012, 151, 50–58. [Google Scholar] [CrossRef]
- Bellmore, J.R.; Pess, G.R.; Duda, J.J.; O’Connor, J.E.; East, A.E.; Foley, M.M.; Wilcox, A.C.; Major, J.J.; Shafroth, P.B.; Morley, S.A.; et al. Conceptualizing Ecological Responses to Dam Removal: If You Remove It, What’s to Come? BioScience 2019, 69, 26–39. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Magilligan, F.; Nislow, K.; Kynard, B.; Hackman, A. Immediate Changes in Stream Channel Geomorphology, Aquatic Habitat, and Fish Assemblages Following Dam Removal in a Small Upland Catchment. Geomorphology 2016, 252, 158–170. [Google Scholar] [CrossRef] [Green Version]
- Somerville, D.; Pruitt, B. Physical Stream Assessment: A Review of Selected Protocols for Use in the Clean Water Act Section 404 Program; Prepared for the US Environmental Protection Agency, Office of Wetlands, Oceans, and Watersheds, Wetlands Division (Order No. 3W-0503-NATX); United States Environmental Protection Agency: Washington, DC, USA, 2004. [Google Scholar]
- Dufour, S.; Bernez, I.; Betbeder, J.; Corgne, S.; Hubert-Moy, L.; Nabucet, J.; Rapinel, S.; Sawtschuk, J.; Trollé, C. Monitoring Restored Riparian Vegetation: How Can Recent Developments in Remote Sensing Sciences Help? Knowl. Manag. Aquat. Ecosyst. 2013, 410, 10. [Google Scholar] [CrossRef]
- Van Iersel, W.; Straatsma, M.; Addink, E.; Middelkoop, H. Monitoring Phenology of Floodplain Grassland and Herbaceous Vegetation with UAV Imagery. In Proceedings of the XXIII ISPRS Congress, Commission VII, Prague, Czech Republic, 12–19 July 2016; International Society for Photogrammetry and Remote Sensing. Volume 41, pp. 569–571. [Google Scholar]
- Agisoft PhotoScan User Manual Professional Edition, Version 1.4. Available online: https://www.agisoft.com/pdf/photoscan-pro_1_4_en.pdf (accessed on 25 February 2022).
- Woodget, A.S.; Dietrich, J.T.; Wilson, R.T. Quantifying Below-Water Fluvial Geomorphic Change: The Implications of Refraction Correction, Water Surface Elevations, and Spatially Variable Error. Remote Sens. 2019, 11, 2415. [Google Scholar] [CrossRef] [Green Version]
- Dietrich, J.T. Bathymetric Structure-from-Motion: Extracting Shallow Stream Bathymetry from Multi-View Stereo Photogrammetry. Earth Surf. Process. Landf. 2017, 42, 355–364. [Google Scholar] [CrossRef]
- Woodget, A.; Carbonneau, P.; Visser, F.; Maddock, I.P. Quantifying Submerged Fluvial Topography Using Hyperspatial Resolution UAS Imagery and Structure from Motion Photogrammetry. Earth Surf. Process. Landf. 2015, 40, 47–64. [Google Scholar] [CrossRef] [Green Version]
- Entwistle, N.; Heritage, G. An Evaluation DEM Accuracy Acquired Using a Small Unmanned Aerial Vehicle across a Riverine Environment. Int. J. New Technol. Res. 2017, 3, 43–48. [Google Scholar]
- Partama, I.; Kanno, A.; Akamatsu, Y.; Inui, R.; Goto, M.; Sekine, M. A Simple and Empirical Refraction Correction Method for Uav-Based Shallow-Water Photogrammetry. Int. J. Environ. Chem. Ecol. Geol. Geophys. Eng. 2017, 11, 254–261. [Google Scholar]
- Tamminga, A.D.; Eaton, B.C.; Hugenholtz, C.H. UAS-Based Remote Sensing of Fluvial Change Following an Extreme Flood Event. Earth Surf. Process. Landf. 2015, 40, 1464–1476. [Google Scholar] [CrossRef]
- Marteau, B.; Vericat, D.; Gibbins, C.; Batalla, R.J.; Green, D.R. Application of Structure-from-Motion Photogrammetry to River Restoration. Earth Surf. Process. Landf. 2017, 42, 503–515. [Google Scholar] [CrossRef] [Green Version]
- Akay, S.S.; Özcan, O.; Şanlı, F.B.; Görüm, T.; Şen, Ö.L.; Bayram, B. UAV-Based Evaluation of Morphological Changes Induced by Extreme Rainfall Events in Meandering Rivers. PLoS ONE 2020, 15, e0241293. [Google Scholar] [CrossRef] [PubMed]
- Cook, K.L. An Evaluation of the Effectiveness of Low-Cost UAVs and Structure from Motion for Geomorphic Change Detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Eschbach, D.; Grussenmeyer, P.; Koehl, M.; Guillemin, S.; Schmitt, L. Combining Geodetic and Geomorphic Methods to Monitor Restored Side Channels: Feedback from the Upper Rhine. Geomorphology 2021, 374, 107372. [Google Scholar] [CrossRef]
- Davis, J.; Lautz, L.; Kelleher, C.; Vidon, P.; Russoniello, C.; Pearce, C. Evaluating the Geomorphic Channel Response to Beaver Dam Analog Installation Using Unoccupied Aerial Vehicles. Earth Surf. Process. Landf. 2021, 46, 2349–2364. [Google Scholar] [CrossRef]
- Ritchie, A.C.; Warrick, J.A.; East, A.E.; Magirl, C.S.; Stevens, A.W.; Bountry, J.A.; Randle, T.J.; Curran, C.A.; Hilldale, R.C.; Duda, J.J.; et al. Morphodynamic Evolution Following Sediment Release from the World’s Largest Dam Removal. Sci. Rep. 2018, 8, 1–13. [Google Scholar] [CrossRef]
- Warrick, J.A.; Bountry, J.A.; East, A.E.; Magirl, C.S.; Randle, T.J.; Gelfenbaum, G.; Ritchie, A.C.; Pess, G.R.; Leung, V.; Duda, J.J. Large-Scale Dam Removal on the Elwha River, Washington, USA: Source-to-Sink Sediment Budget and Synthesis. Geomorphology 2015, 246, 729–750. [Google Scholar] [CrossRef]
- Randle, T.J.; Bountry, J.A.; Ritchie, A.; Wille, K. Large-Scale Dam Removal on the Elwha River, Washington, USA: Erosion of Reservoir Sediment. Geomorphology 2015, 246, 709–728. [Google Scholar] [CrossRef]
- Boon, M.; Greenfield, R.; Tesfamichael, S. Wetland Assessment Using Unmanned Aerial Vehicle (UAV) Photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 781–788. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, O.S.; Shemrock, A.; Chabot, D.; Dillon, C.; Williams, G.; Wasson, R.; Franklin, S.E. Hierarchical Land Cover and Vegetation Classification Using Multispectral Data Acquired from an Unmanned Aerial Vehicle. Int. J. Remote Sens. 2017, 38, 2037–2052. [Google Scholar] [CrossRef]
- Dunford, R.; Michel, K.; Gagnage, M.; Piégay, H.; Trémelo, M.-L. Potential and Constraints of Unmanned Aerial Vehicle Technology for the Characterization of Mediterranean Riparian Forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar] [CrossRef]
- Kollár, S.; Vekerdy, Z.; Márkus, B. Aerial Image Classification for the Mapping of Riparian Vegetation Habitats. Acta Silv. Lignaria Hung. 2013, 9, 119–133. [Google Scholar] [CrossRef] [Green Version]
- Michez, A.; Piégay, H.; Lisein, J.; Claessens, H.; Lejeune, P. Classification of Riparian Forest Species and Health Condition Using Multi-Temporal and Hyperspatial Imagery from Unmanned Aerial System. Environ. Monit. Assess. 2016, 188, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Durgan, S.D.; Zhang, C.; Duecaster, A.; Fourney, F.; Su, H. Unmanned Aircraft System Photogrammetry for Mapping Diverse Vegetation Species in a Heterogeneous Coastal Wetland. Wetlands 2020, 40, 2621–2633. [Google Scholar] [CrossRef]
- Husson, E.; Reese, H.; Ecke, F. Combining Spectral Data and a DSM from UAS-Images for Improved Classification of Non-Submerged Aquatic Vegetation. Remote Sens. 2017, 9, 247. [Google Scholar] [CrossRef] [Green Version]
- Koch, M.; Koebsch, F.; Hahn, J.; Jurasinski, G. From Meadow to Shallow Lake: Monitoring Secondary Succession in a Coastal Fen after Rewetting by Flooding Based on Aerial Imagery and Plot Data. Mires Peat 2017, 19, 1–17. [Google Scholar]
- Morgan, G.R.; Hodgson, M.E.; Wang, C.; Schill, S.R. Unmanned Aerial Remote Sensing of Coastal Vegetation: A Review. Ann. GIS 2022, 1–15. [Google Scholar] [CrossRef]
- Gomez and Sullivan Engineers. Available online: https://www.gomezandsullivan.com/services/case-study-sawyer-mill/ (accessed on 24 August 2021).
- Sawyer’s Mill Dams Removal Feasibility Study. Available online: https://www.dover.nh.gov/Assets/government/boards-commissions/conservation-commission/presentations/2014.03.03_SawyerMillDamStudy.pdf (accessed on 4 February 2022).
- Siegel, L.S.; Cassidy, K.; Stewart, R. Sediment Management Plan at the Sawyer Mill Upper and Lower Dams, Dover, NH. Gomez and Sullivan Engineers; Draft Technical Memo; Gomez and Sullivan Engineers: Henniker, NH, USA, 2016. [Google Scholar]
- Bellamy Reservoir. Available online: https://www.wildlife.state.nh.us/maps/bathymetry/bellamy_madbury.pdf (accessed on 22 August 2021).
- DJI. Available online: https://www.dji.com/downloads/products/phantom-3-pro (accessed on 25 February 2022).
- Woodget, A.S.; Austrums, R.; Maddock, I.P.; Habit, E. Drones and Digital Photogrammetry: From Classifications to Continuums for Monitoring River Habitat and Hydromorphology. Wiley Interdiscip. Rev. Water 2017, 4, e1222. [Google Scholar] [CrossRef] [Green Version]
- Vezza, P.; Astegiano, L.; Fukuda, S.; Lingua, A.; Comoglio, C.; Palau-Salvador, G. Using Structure from Motion Techniques to Describe and Evaluate Instream Physical Habitat. In Proceedings of the Extended Abstract, 11th International Symposium on Ecohydraulics, Melbourne, Australia, 7–12 February 2016. [Google Scholar]
- James, M.R.; Robson, S. Mitigating Systematic Error in Topographic Models Derived from UAV and Ground-Based Image Networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Bemis, S.P.; Micklethwaite, S.; Turner, D.; James, M.R.; Akciz, S.; Thiele, S.T.; Bangash, H.A. Ground-Based and UAV-Based Photogrammetry: A Multi-Scale, High-Resolution Mapping Tool for Structural Geology and Paleoseismology. J. Struct. Geol. 2014, 69, 163–178. [Google Scholar] [CrossRef]
- Wackrow, R.; Chandler, J.H. Minimising Systematic Error Surfaces in Digital Elevation Models Using Oblique Convergent Imagery. Photogramm. Rec. 2011, 26, 16–31. [Google Scholar] [CrossRef] [Green Version]
- Topcon HiPer Lite Operator’s Manual. Available online: https://www.manualslib.com/manual/797322/Topcon-Hiper-Lite.html (accessed on 25 February 2022).
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Assessment of Photogrammetric Mapping Accuracy Based on Variation Ground Control Points Number Using Unmanned Aerial Vehicle. Measurement 2017, 98, 221–227. [Google Scholar] [CrossRef]
- Tonkin, T.N.; Midgley, N.G. Ground-Control Networks for Image Based Surface Reconstruction: An Investigation of Optimum Survey Designs Using UAV Derived Imagery and Structure-from-Motion Photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef] [Green Version]
- Neugirg, F.; Stark, M.; Kaiser, A.; Vlácilová, M.; Della Seta, M.; Vergari, F.; Schmidt, J.; Becht, M.; Haas, F. Erosion Processes in Calanchi in the Upper Orcia Valley, Southern Tuscany, Italy Based on Multitemporal High-Resolution Terrestrial LiDAR and UAV Surveys. Geomorphology 2016, 269, 8–22. [Google Scholar] [CrossRef]
- Miřijovskỳ, J.; Langhammer, J. Multitemporal Monitoring of the Morphodynamics of a Mid-Mountain Stream Using UAS Photogrammetry. Remote Sens. 2015, 7, 8586–8609. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Han, L.; Han, L.; Zhu, L. How Well Do Deep Learning-Based Methods for Land Cover Classification and Object Detection Perform on High Resolution Remote Sensing Imagery? Remote Sens. 2020, 12, 417. [Google Scholar] [CrossRef] [Green Version]
- Foody, G.M.; Mathur, A. A Relative Evaluation of Multiclass Image Classification by Support Vector Machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1335–1343. [Google Scholar] [CrossRef] [Green Version]
- Foody, G.M.; Mathur, A. The Use of Small Training Sets Containing Mixed Pixels for Accurate Hard Image Classification: Training on Mixed Spectral Responses for Classification by a SVM. Remote Sens. Environ. 2006, 103, 179–189. [Google Scholar] [CrossRef]
- Evans, A.D. A Bird’s Eye View of Stream Ecology: Evaluating Stream Condition and Restoration Impacts Using Drones, Structure-from-Motion Photogrammetry, and Machine Learning Methods. Ph.D. Thesis, University of New Hampshire, Durham, NH, USA, 2021. [Google Scholar]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially Located Platform and Aerial Photography for Documentation of Grazing Impacts on Wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Eng, L.S.; Ismail, R.; Hashim, W.; Baharum, A. The Use of VARI, GLI, and VIgreen Formulas in Detecting Vegetation in Aerial Images. Int. J. Technol. 2019, 10, 1385–1394. [Google Scholar] [CrossRef] [Green Version]
- McHugh, M.L. Interrater Reliability: The Kappa Statistic. Biochem. Med. 2012, 22, 276–282. [Google Scholar] [CrossRef]
- Themistocleous, K. DEM Modeling Using RGB-Based Vegetation Indices from UAV Images. In Proceedings of the Seventh International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2019), Paphos, Cyprus, 18–21 March 2019; International Society for Optics and Photonics. Volume 11174, p. 111741. [Google Scholar]
- Brasington, J.; Langham, J.; Rumsby, B. Methodological Sensitivity of Morphometric Estimates of Coarse Fluvial Sediment Transport. Geomorphology 2003, 53, 299–316. [Google Scholar] [CrossRef]
- Meneses, N.C.; Baier, S.; Reidelstürz, P.; Geist, J.; Schneider, T. Modelling Heights of Sparse Aquatic Reed (Phragmites Australis) Using Structure from Motion Point Clouds Derived from Rotary-and Fixed-Wing Unmanned Aerial Vehicle (UAV) Data. Limnologica 2018, 72, 10–21. [Google Scholar] [CrossRef]
- Zhao, B.; Yan, Y.; Guo, H.; He, M.; Gu, Y.; Li, B. Monitoring Rapid Vegetation Succession in Estuarine Wetland Using Time Series MODIS-Based Indicators: An Application in the Yangtze River Delta Area. Ecol. Indic. 2009, 9, 346–356. [Google Scholar] [CrossRef]
- Van Der Putten, W.H.; Bardgett, R.D.; de Ruiter, P.C.; Hol, W.; Meyer, K.M.; Bezemer, T.M.; Bradford, M.; Christensen, S.; Eppinga, M.; Fukami, T.; et al. Empirical and Theoretical Challenges in Aboveground–Belowground Ecology. Oecologia 2009, 161, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Gritti, E.; Smith, B.; Sykes, M. Vulnerability of Mediterranean Basin Ecosystems to Climate Change and Invasion by Exotic Plant Species. J. Biogeogr. 2006, 33, 145–157. [Google Scholar] [CrossRef]
- Lisius, G.L.; Snyder, N.P.; Collins, M.J. Vegetation Community Response to Hydrologic and Geomorphic Changes Following Dam Removal. River Res. Appl. 2018, 34, 317–32752. [Google Scholar] [CrossRef]
- Prach, K.; Chenoweth, J.; del Moral, R. Spontaneous and Assisted Restoration of Vegetation on the Bottom of a Former Water Reservoir, the Elwha River, Olympic National Park, WA, USA. Restor. Ecol. 2019, 27, 592–599. [Google Scholar] [CrossRef]
- Truslow, D. Sediment Sampling Results, Sawyer Mill Dam Removal Feasibility Study, Dover, NH; Technical Memorandum; Truslow Resource Consulting LLC: Portsmouth, NH, USA, 2014. [Google Scholar]
- Flener, C.; Vaaja, M.; Jaakkola, A.; Krooks, A.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppä, H.; Hyyppä, J.; Alho, P. Seamless Mapping of River Channels at High Resolution Using Mobile LiDAR and UAV-Photography. Remote Sens. 2013, 5, 6382–6407. [Google Scholar] [CrossRef] [Green Version]
- Sheykhmousa, M.; Mahdianpari, M.; Ghanbari, H.; Mohammadimanesh, F.; Ghamisi, P.; Homayouni, S. Support Vector Machine versus Random Forest for Remote Sensing Image Classification: A Meta-Analysis and Systematic Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6308–6325. [Google Scholar] [CrossRef]
- Anderson, S.W. Uncertainty in Quantitative Analyses of Topographic Change: Error Propagation and the Role of Thresholding. Earth Surf. Process. Landf. 2019, 44, 1015–1033. [Google Scholar] [CrossRef]
- Magri, L.; Toldo, R. Bending the Doming Effect in Structure from Motion Reconstructions through Bundle Adjustment. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 235. [Google Scholar] [CrossRef] [Green Version]
- Rusnák, M.; Sládek, J.; Kidová, A.; Lehotskỳ, M. Template for High-Resolution River Landscape Mapping Using UAV Technology. Measurement 2018, 115, 139–151. [Google Scholar] [CrossRef]
- Smith, M.W.; Vericat, D. From Experimental Plots to Experimental Landscapes: Topography, Erosion and Deposition in Sub-Humid Badlands from Structure-from-Motion Photogrammetry. Earth Surf. Process. Landf. 2015, 40, 1656–1671. [Google Scholar] [CrossRef] [Green Version]
- Over, J.-S.R.; Ritchie, A.C.; Kranenburg, C.J.; Brown, J.A.; Buscombe, D.D.; Noble, T.; Sherwood, C.R.; Warrick, J.A.; Wernette, P.A. Processing Coastal Imagery with Agisoft Metashape Professional Edition, Version 1.6—Structure from Motion Workflow Documentation; US Geological Survey: Reston, VA, USA, 2021. [Google Scholar]
- Vittoz, P.; Guisan, A. How Reliable Is the Monitoring of Permanent Vegetation Plots? A Test with Multiple Observers. J. Veg. Sci. 2007, 18, 413–422. [Google Scholar] [CrossRef]
- Compute Confusion Matrix. Available online: https://desktop.arcgis.com/en/arcmap/latest/tools/spatial-analyst-toolbox/compute-confusion-matrix.htm (accessed on 25 February 2022).







| Study Area | Flight Date | Flying Height (m above Ground Level) | Number of Images | Topographic Survey Data | Comparable Vegetation Plot Data? |
|---|---|---|---|---|---|
| UR | 14 August 2019 | 76 | 495 | CPs, Transects surveyed on 1: 30 July 2019; 1 August 2019; 6 August 2019 GCPs surveyed on: 19 July 2019; 30 July 2019; 6 August 2019 | Yes |
| 10 July 2020 | 496 | CPs, Transects surveyed on1: 16 July 2020; 24 July 2020 GCPs surveyed on: 29 April 2020; 3 May 2020; 8 May 2020 | No | ||
| UR-3 | 22 August 2019 | 46 | 288 | CPs, Transects surveyed on: 22 August 2019 GCPs surveyed on: 6 August 2019 | Yes |
| 6 August 2020 | 288 | CPs, Transects surveyed on: 7 August 2020 GCPs surveyed on: 8 May 2020 | No | ||
| UR-2 | 23 August 2019 | 46 | 364 | CPs, Transects surveyed on: 23 August 2019 GCPs surveyed on: 19 July 2019; 6 August 2019 | Yes |
| 24 July 2020 | 365 | CPs, Transects surveyed on: 24 July 2020 GCPs surveyed on: 3 May 2020 | No | ||
| UR-1 | 30 July 2019 | 30 | 469 | CPs, VCPs, Transects surveyed on: 30 July 2019; 1 August 2019 GCPs surveyed on: 19 July 2019; 30 July 2019 | NA |
| 16 July 2020 | 460 | CPs, VCPs, Transects surveyed on: 16 July 2020 GCPs surveyed on: 16 July 2020 | |||
| LR | 19 July 2019 | 61 | 289 | For both LR dates: Opportunistic GCPs and VCPs surveyed on 19 July 2019; 9 August 2019; 11 September 2019 2; 22 May 2020 | NA |
| 5 August 2020 | 289 |
| Study Area | Flight Date [dd/mm/yyyy] | Number of GCPs | X GCP Error (cm) | Y GCP Error (cm) | Z GCP Error (cm) | Total GCP Error (cm) | Number of VCPs | X VCP Error (cm) | Y VCP Error (cm) | Z VCP Error (cm) | Total VCP Error (cm) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| UR | 14 August 2019 | 27 | 3.42 | 3.08 | 3.39 | 5.71 | NA | NA | NA | NA | NA |
| 10 July 2020 | 27 | 3.27 | 3.28 | 3.78 | 5.98 | NA | NA | NA | NA | NA | |
| UR-3 | 22 August 2019 | 14 | 1.74 | 1.93 | 2.07 | 3.32 | NA | NA | NA | NA | NA |
| 6 August 2020 | 12 | 1.07 | 1.76 | 5.02 | 5.43 | NA | NA | NA | NA | NA | |
| UR-2 | 23 August 2019 | 19 | 3.46 | 8.53 | 4.39 | 10.20 | NA | NA | NA | NA | NA |
| 24 July 2020 | 19 | 1.65 | 1.49 | 3.31 | 3.98 | NA | NA | NA | NA | NA | |
| UR-1 | 30 July 2019 | 15 | 1.92 | 2.26 | 5.57 | 6.31 | 9 | 5.95 | 6.61 | 6.28 | 10.89 |
| 16 July 2020 | 15 | 1.56 | 2.37 | 4.72 | 5.51 | 9 | 1.39 | 1.66 | 3.28 | 3.92 | |
| LR | 19 July 2019 | 20 | 4.91 | 4.78 | 6.37 | 9.35 | 10 | 6.55 | 6.47 | 6.66 | 11.36 |
| 5 August 2020 | 20 | 5.36 | 5.02 | 5.68 | 9.28 | 9 | 6.42 | 5.16 | 6.88 | 10.73 |
| Relative Flying Height | Terrain Type | Number of Points | Elevation from DSM (m) - (Surveyed Elevation + Vegetation Height Noted in Field (m)) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Average | Median | Minimum | Maximum | St. Dev. | RMSE | ||||
| Low 1 | Dry | 109 | 0.003 | 0.006 | −0.182 | 0.231 | 0.066 | 0.066 | |
| Wet | 362 | 0.213 | 0.145 | −0.135 | 1.499 | 0.240 | 0.321 | ||
| Vegetation | 414 | −0.135 | −0.072 | −1.899 | 0.608 | 0.277 | 0.308 | ||
| High 2 | Dry | 101 | −0.031 | −0.042 | −0.243 | 0.152 | 0.067 | 0.074 | |
| Wet | 225 | 0.225 | 0.131 | −0.124 | 1.257 | 0.252 | 0.338 | ||
| Vegetation | 232 | −0.204 | −0.215 | −1.308 | 0.682 | 0.259 | 0.330 | ||
| Study Area | Flight Date [dd/mm/yyyy] | Kappa Value | Kappa Interpretation (Following McHugh 2012) | Overall Accuracy |
|---|---|---|---|---|
| UR | 14 August 2019 | 0.98 | Almost perfect agreement | 99% |
| 10 July 2020 | 0.90 | Strong agreement | 92% | |
| UR-3 | 22 August 2019 | 0.98 | Almost perfect agreement | 98% |
| 6 August 2020 | 0.77 | Moderate agreement | 83% | |
| UR-2 | 23 August 2019 | 0.89 | Strong agreement | 92% |
| 24 July 2020 | 0.99 | Almost perfect agreement | 99% | |
| UR-1 | 30 July 2019 | 1.00 | Almost perfect agreement | 100% |
| 16 July 2020 | 0.85 | Strong agreement | 89% |
| Study Area | Sampling Date | VCPs or GCPs Used | Standard Deviation of Z Errors (cm) | Minimum Level of Detection Threshold (cm) |
|---|---|---|---|---|
| UR | 10 July 2020 | GCPs | 3.78 | 9.94 |
| 14 August 2019 | GCPs | 3.39 | ||
| UR-3 | 6 August 2020 | GCPs | 5.02 | 10.65 |
| 22 August 2019 | GCPs | 2.07 | ||
| UR-2 | 24 July 2020 | GCPs | 3.31 | 10.77 |
| 23 August 2019 | GCPs | 4.39 | ||
| UR-1 | 16 July 2020 | VCPs | 3.10 | 11.16 |
| 30 July 2019 | VCPs | 4.78 | ||
| LR | 5 August 2020 | VCPs | 6.85 | 18.72 |
| 19 July 2019 | VCPs | 6.66 |
| Study Area | More Recent Sample Time | Older Sample Time | DoD X and Y Pixel Size (m) | Erosion (m3) | Deposition (m3) | Net Change (m3) |
|---|---|---|---|---|---|---|
| UR | 10 July 2020 | 14 August 2019 | 0.05382 | 2715.9 | 346.8 | −2369.1 |
| UR-3 | 6 August 2020 | 22 August 2019 | 0.03368 | 406.5 | 0.6 | −405.9 |
| UR-2 | 24 July 2020 | 23 August 2019 | 0.03426 | 957.8 | 5.6 | −952.2 |
| UR-1 | 16 July 2020 | 30 July 2019 | 0.02290 | 428.5 | 32.7 | −395.8 |
| Lower-Flying-Height Areas Together 1 | See Above | See Above | See Above | 1792.8 | 38.9 | −1753.9 |
| LR | 5 August 2020 | 19 July 2019 | 0.04534 | 1024.0 | 7.5 | −1016.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Evans, A.D.; Gardner, K.H.; Greenwood, S.; Still, B. UAV and Structure-From-Motion Photogrammetry Enhance River Restoration Monitoring: A Dam Removal Study. Drones 2022, 6, 100. https://doi.org/10.3390/drones6050100
Evans AD, Gardner KH, Greenwood S, Still B. UAV and Structure-From-Motion Photogrammetry Enhance River Restoration Monitoring: A Dam Removal Study. Drones. 2022; 6(5):100. https://doi.org/10.3390/drones6050100
Chicago/Turabian StyleEvans, Alexandra D., Kevin H. Gardner, Scott Greenwood, and Brett Still. 2022. "UAV and Structure-From-Motion Photogrammetry Enhance River Restoration Monitoring: A Dam Removal Study" Drones 6, no. 5: 100. https://doi.org/10.3390/drones6050100
APA StyleEvans, A. D., Gardner, K. H., Greenwood, S., & Still, B. (2022). UAV and Structure-From-Motion Photogrammetry Enhance River Restoration Monitoring: A Dam Removal Study. Drones, 6(5), 100. https://doi.org/10.3390/drones6050100