
Design and Implementation of a UUV Tracking Algorithm for a USV


Abstract
:1. Introduction
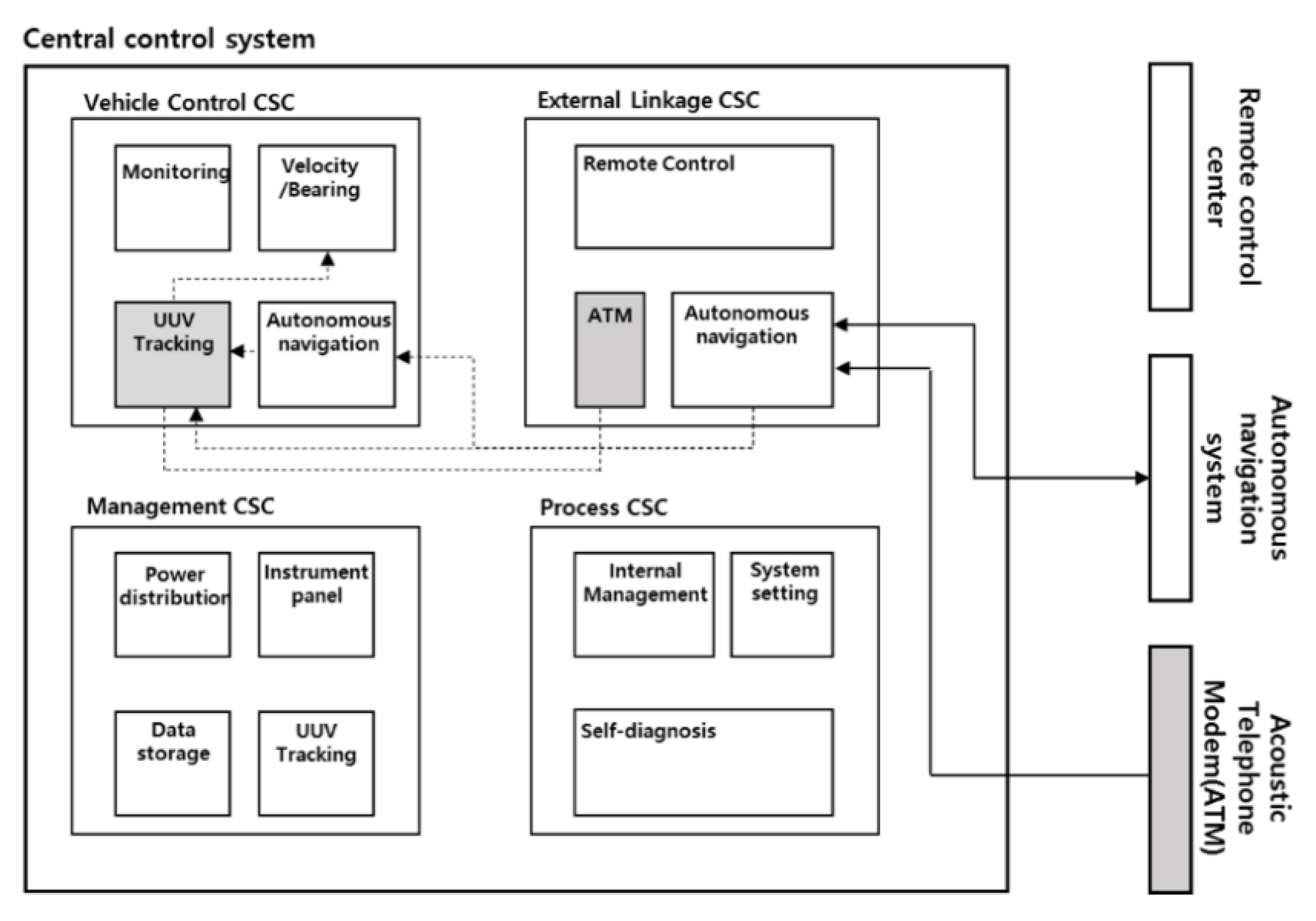
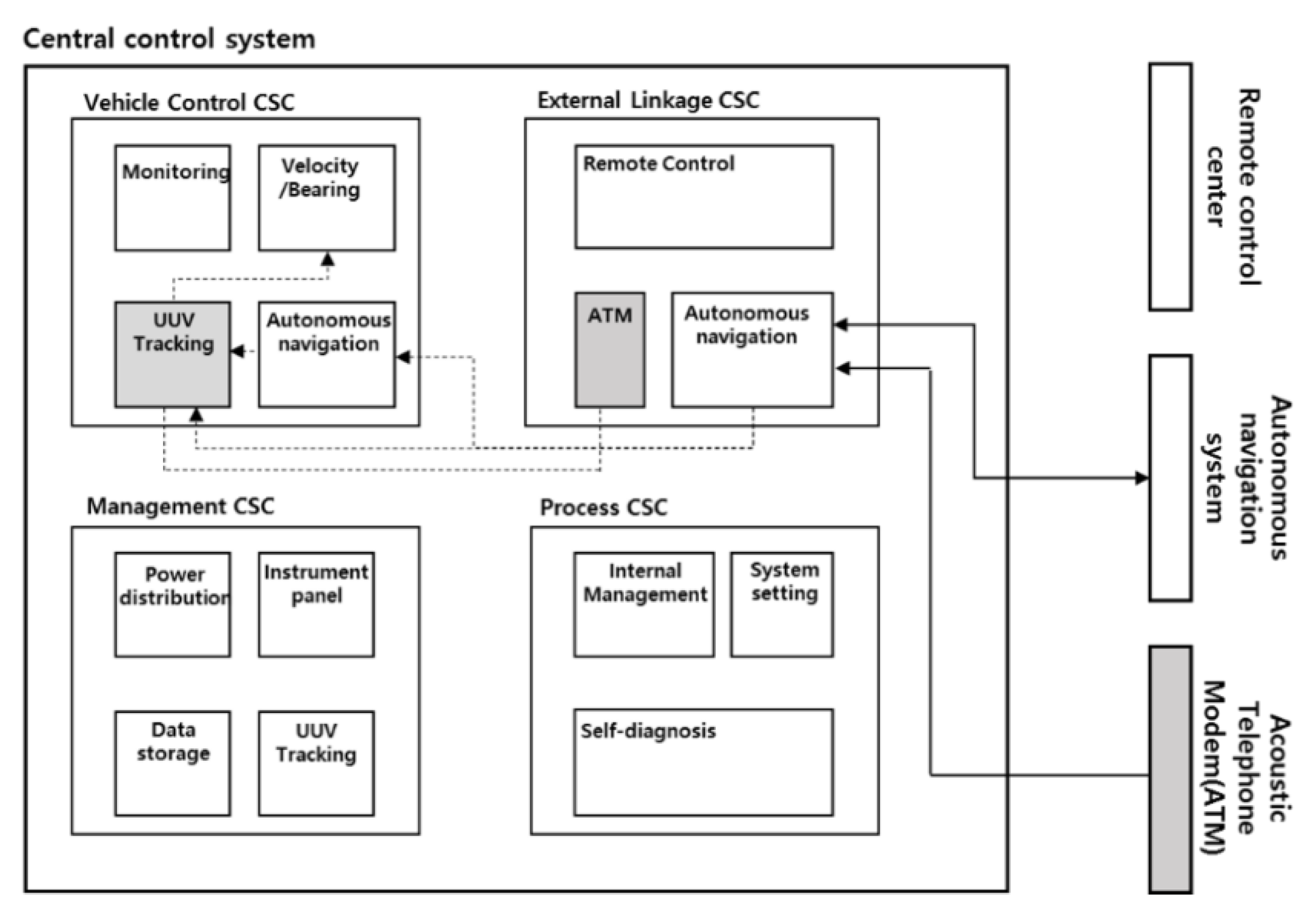
2. Algorithm Architecture
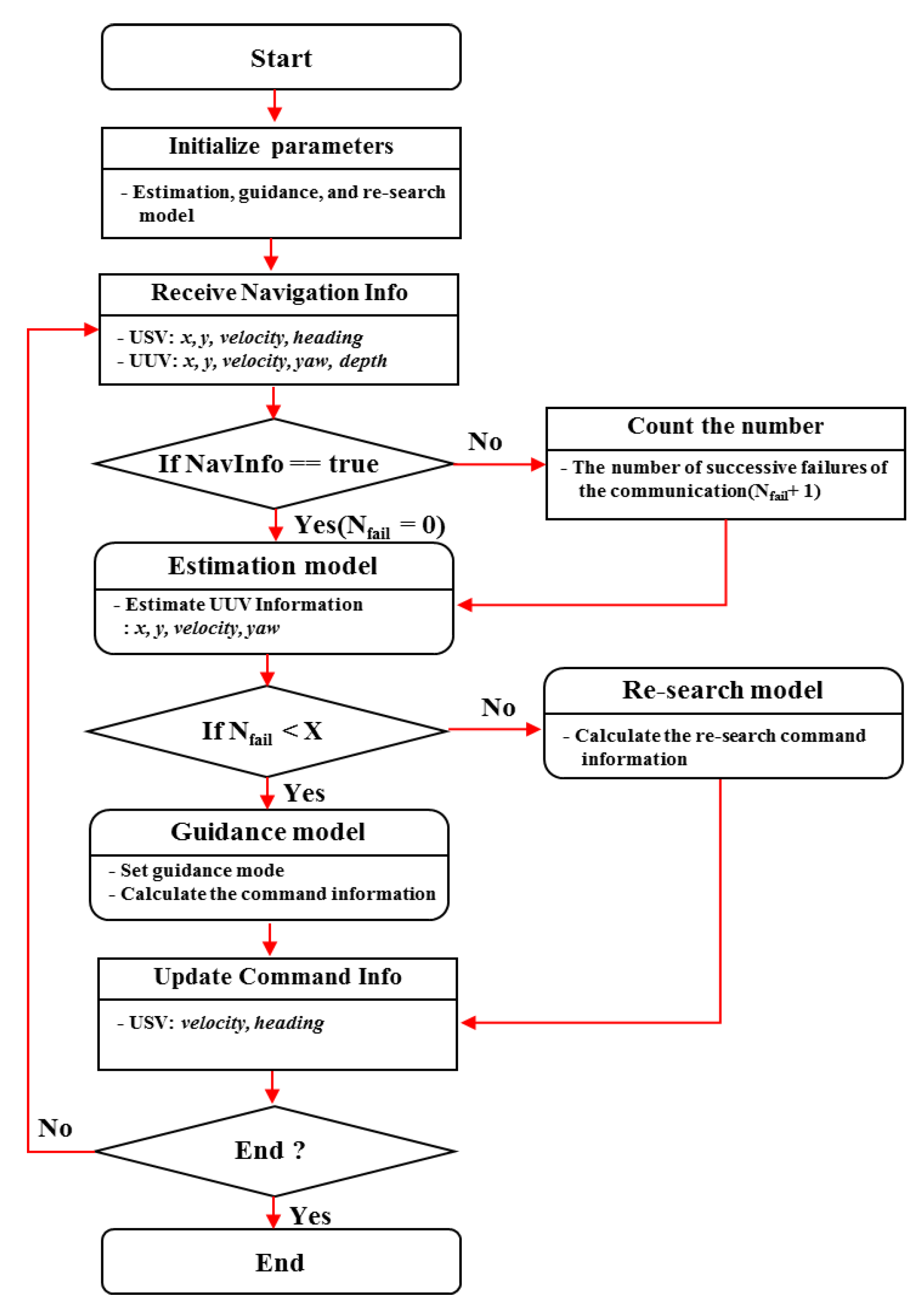
3. UUV Tracking Models and Simulation Results
3.1. Estimation Model
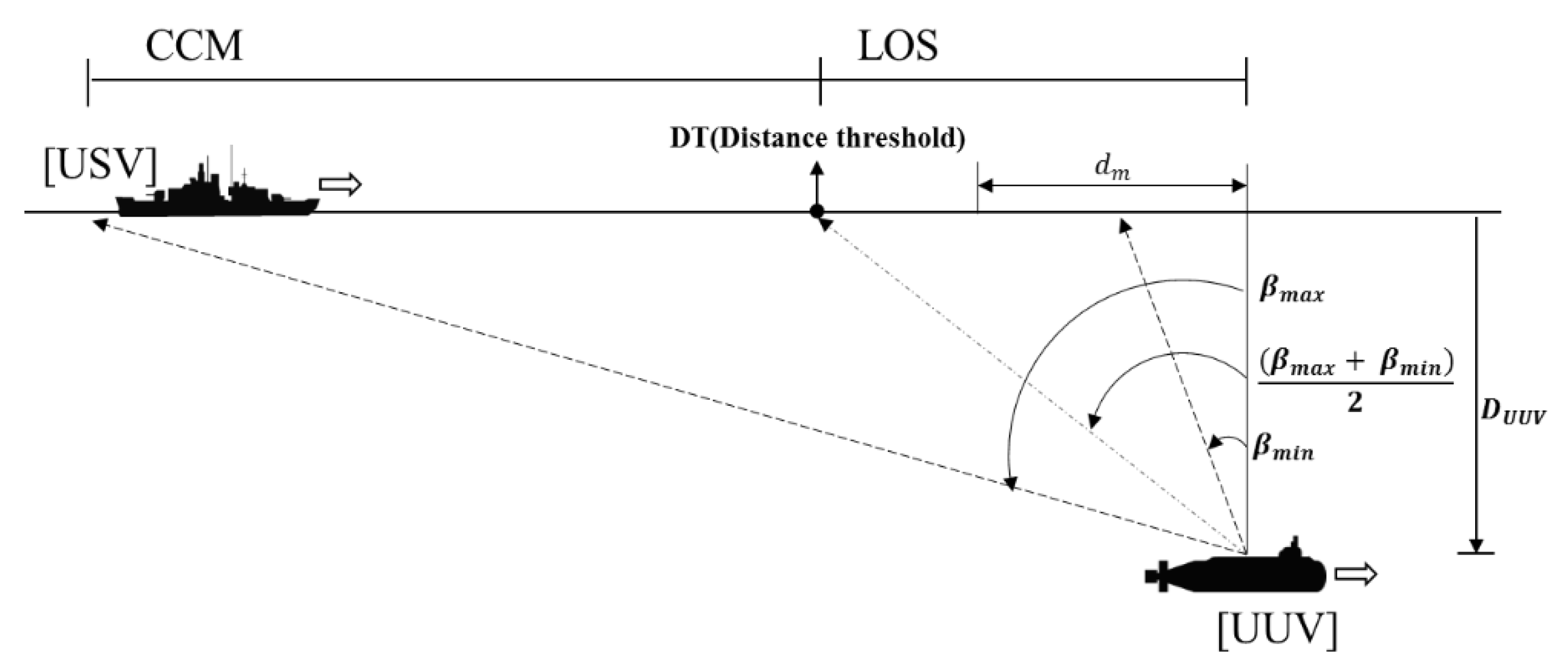
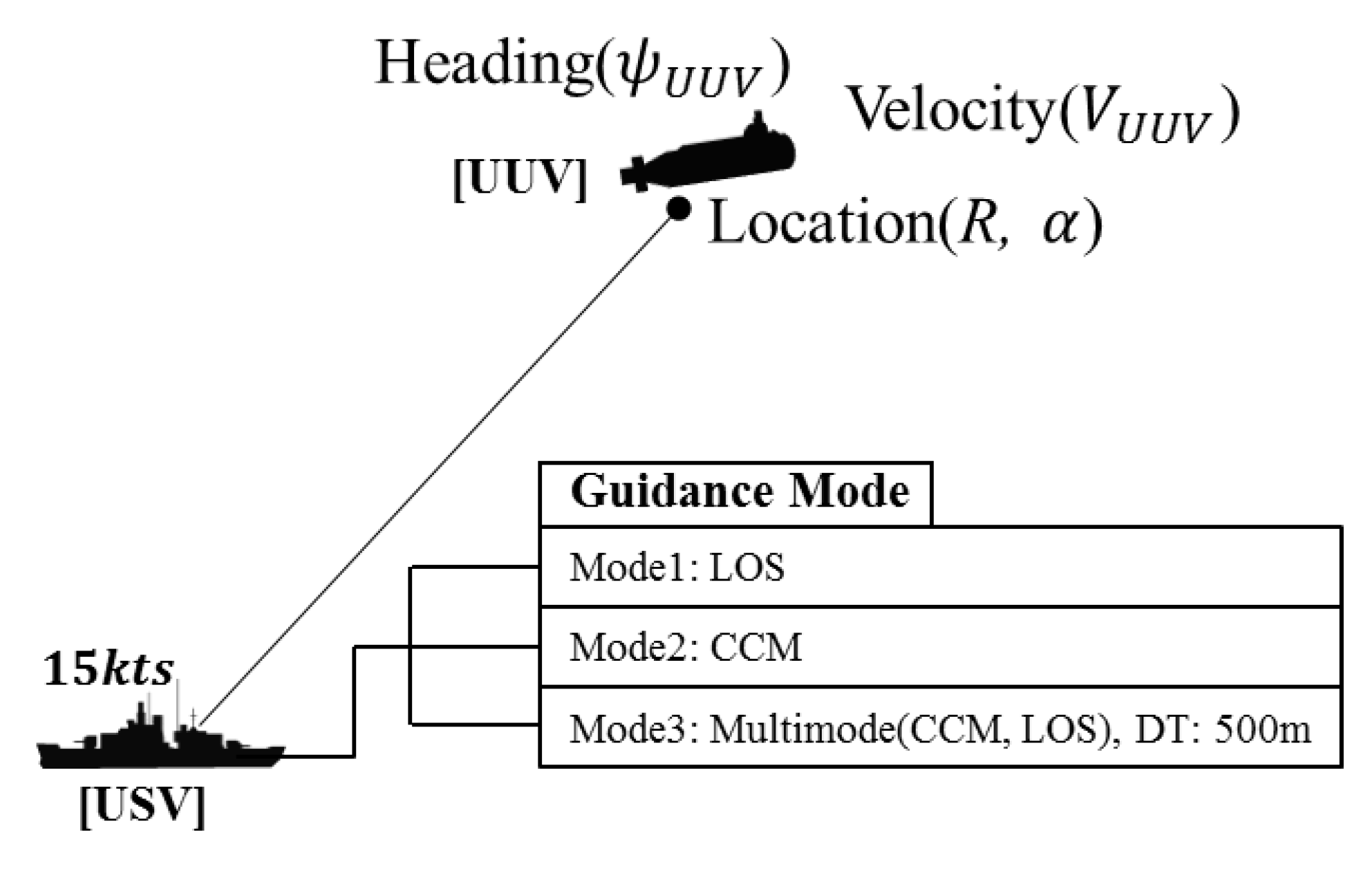
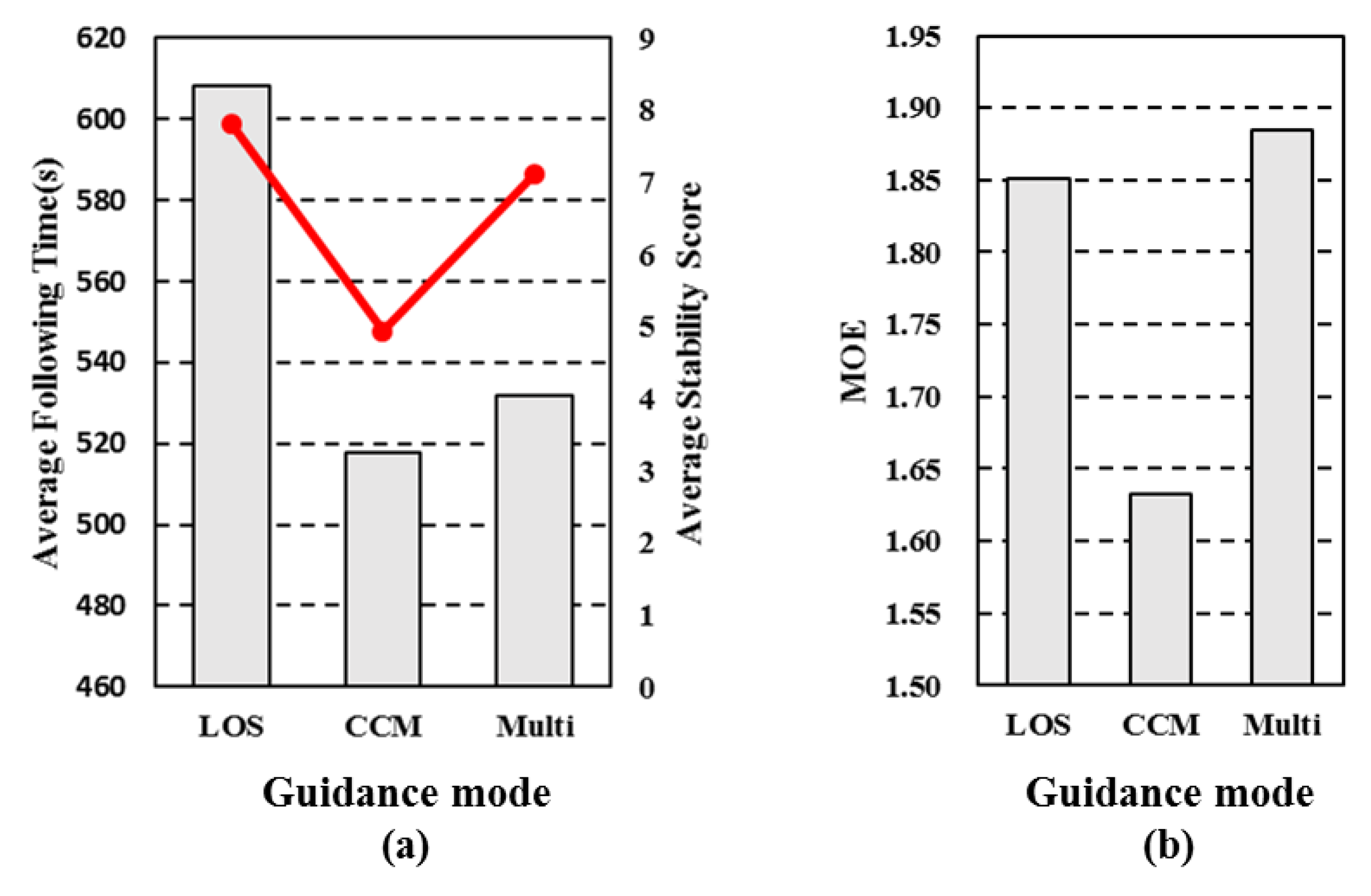
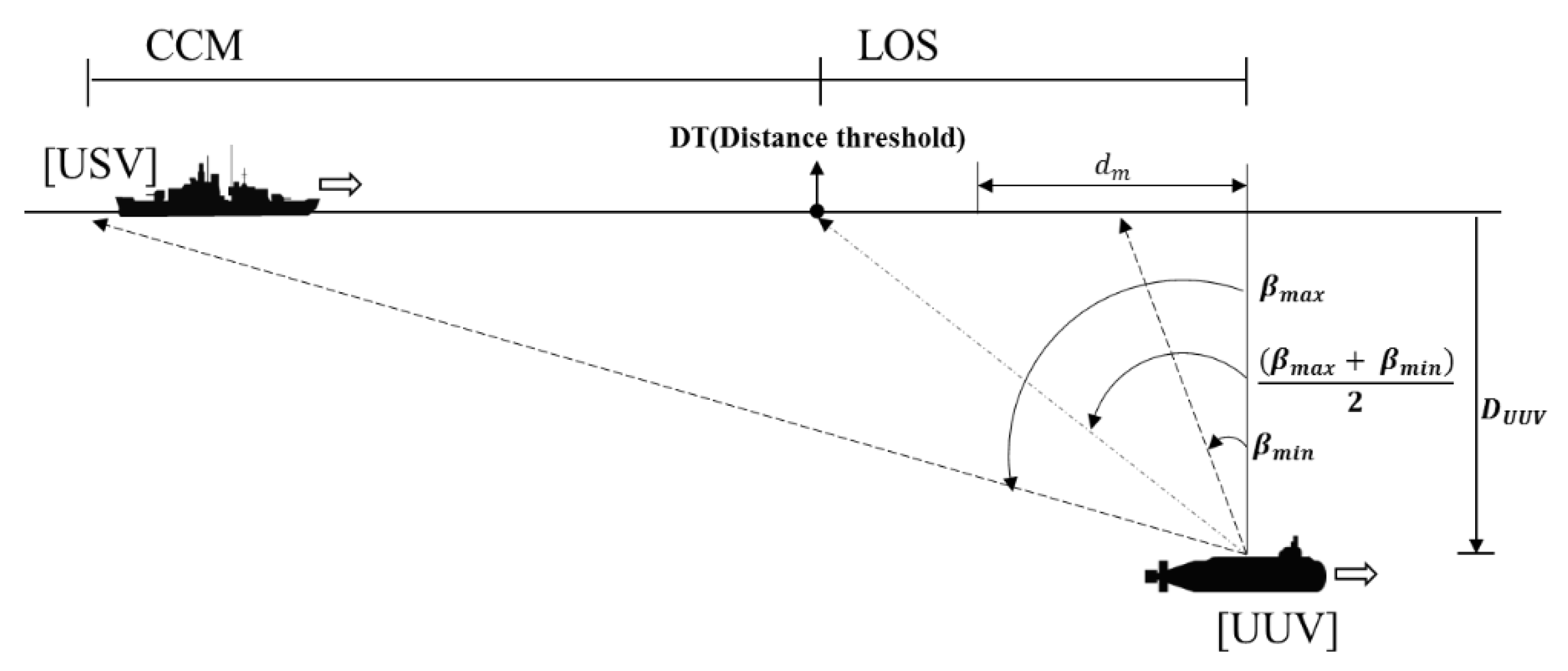
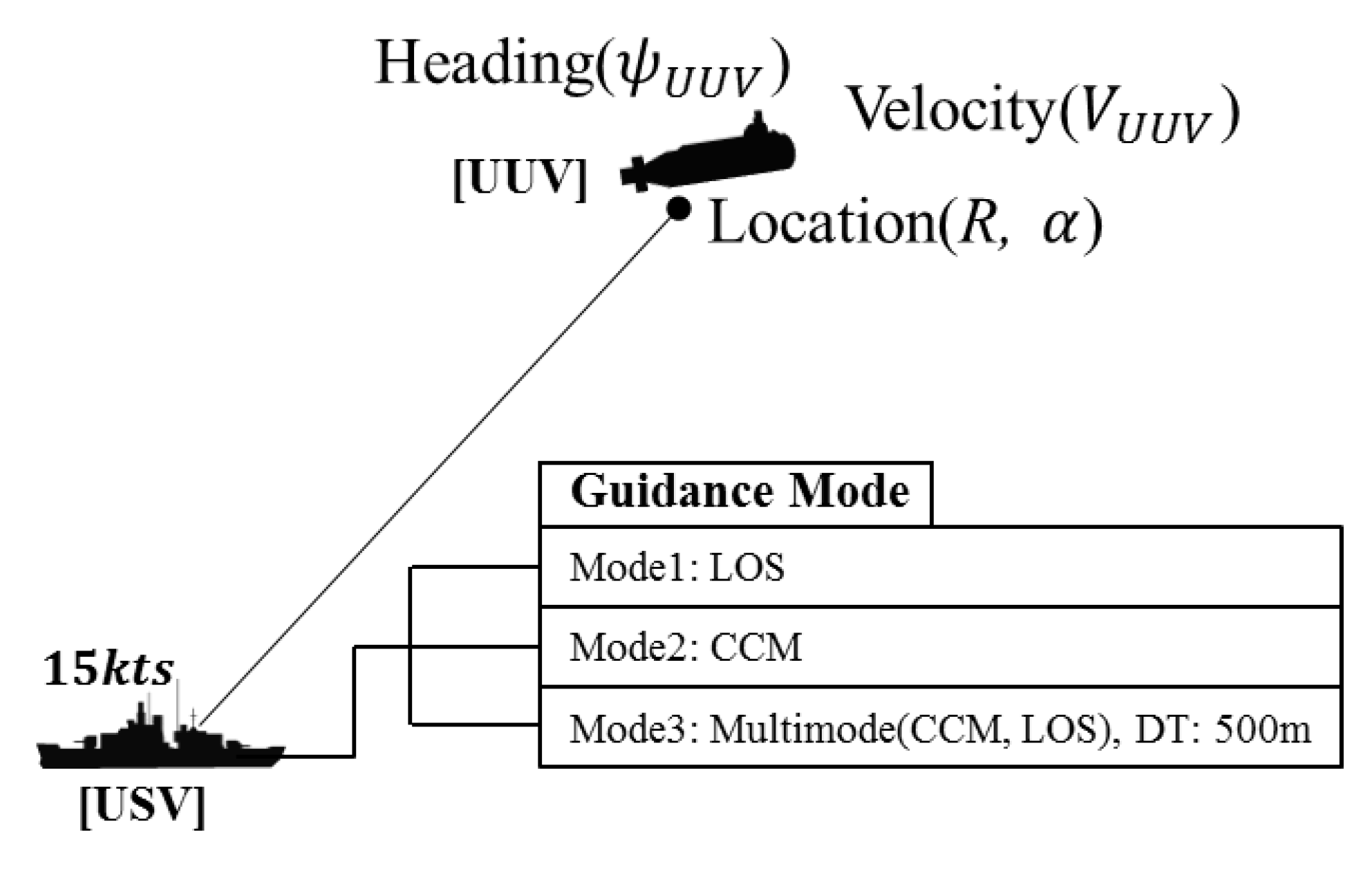
3.2. Guidance Model
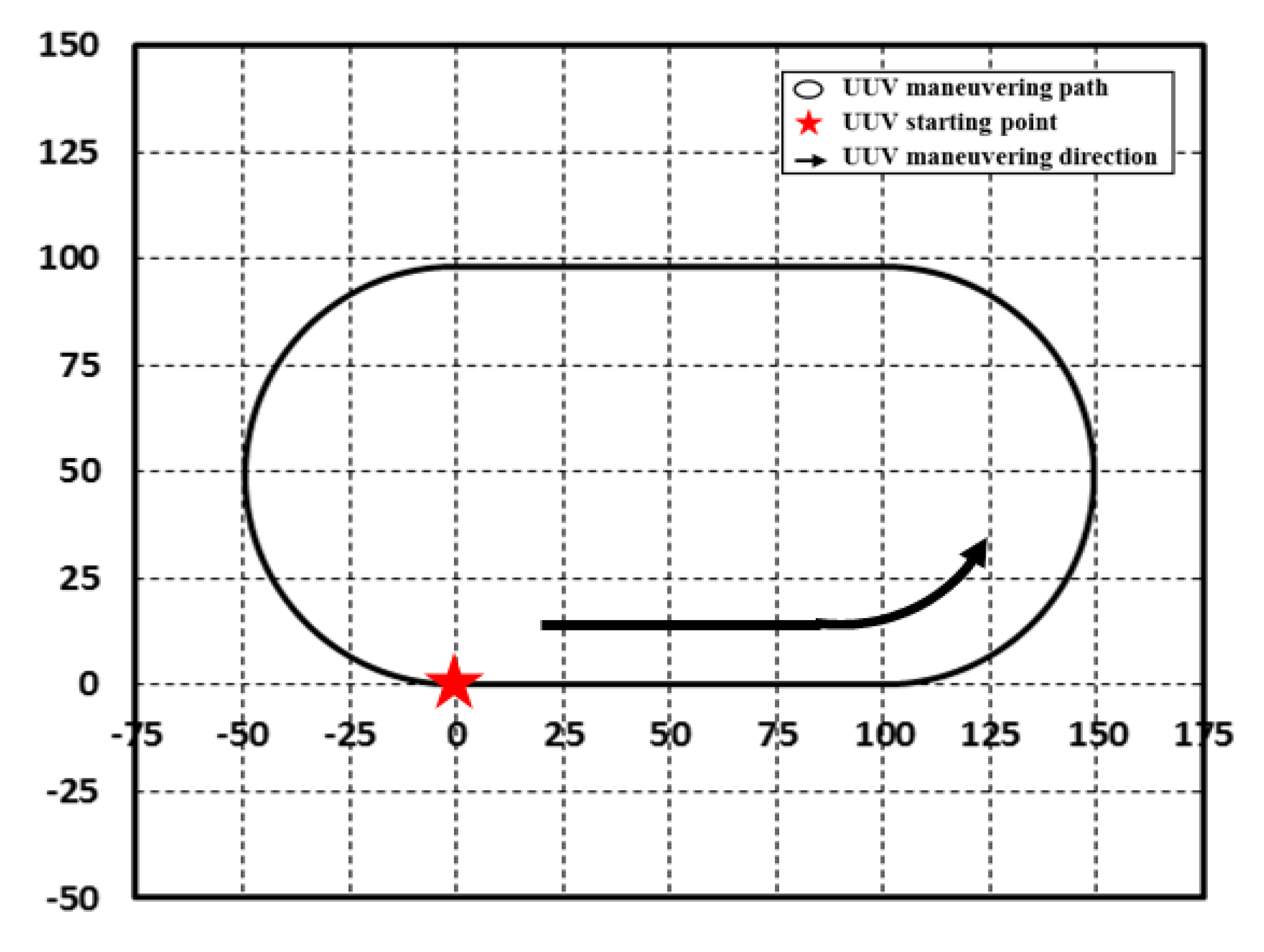
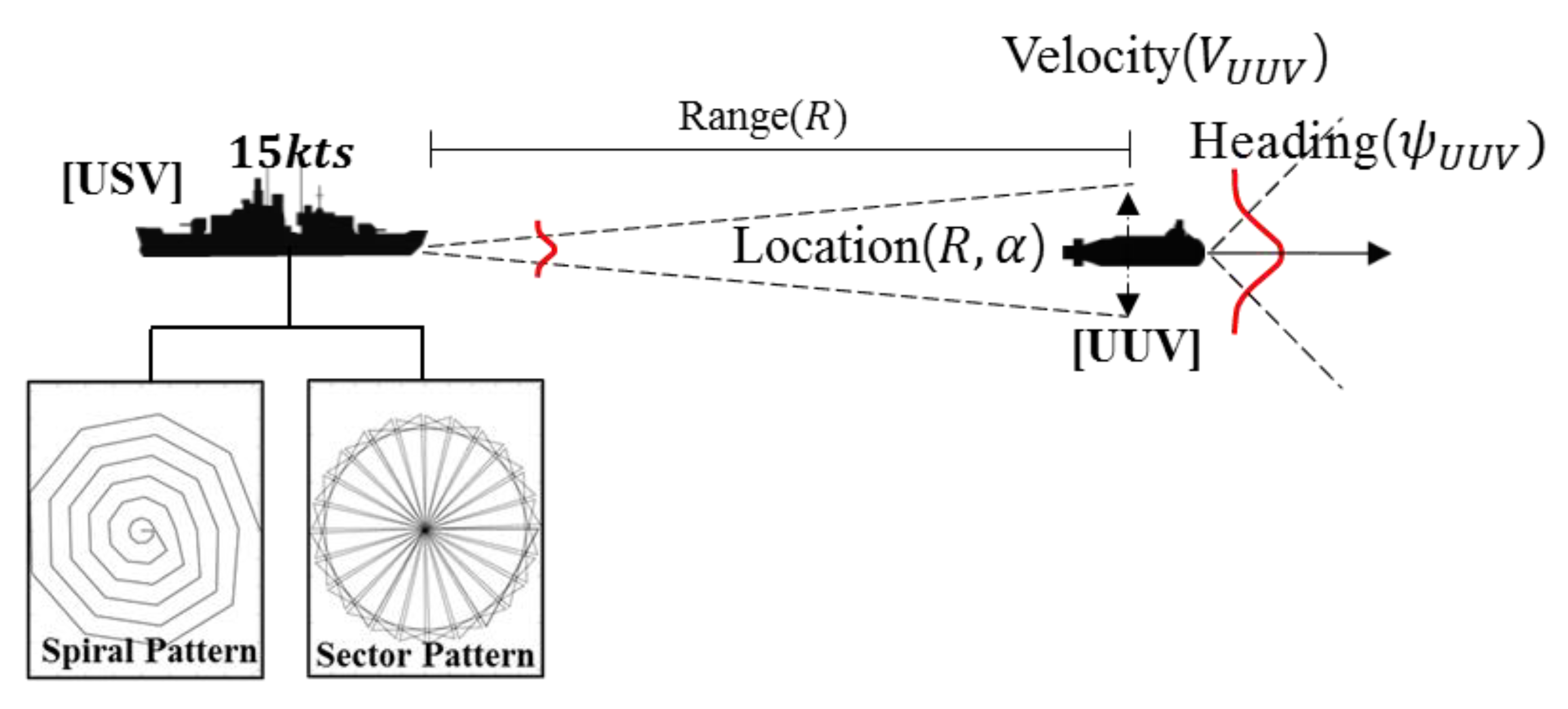
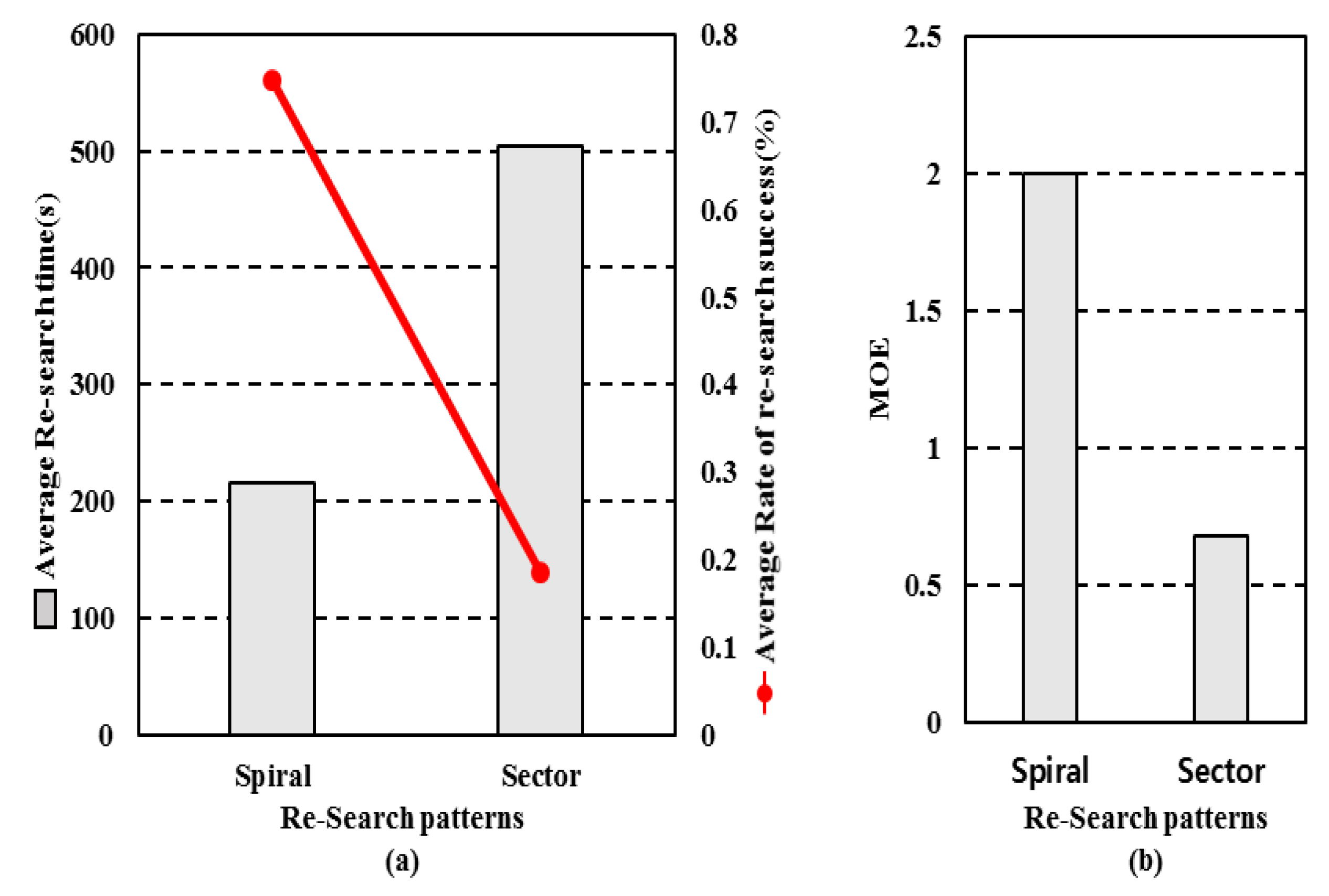
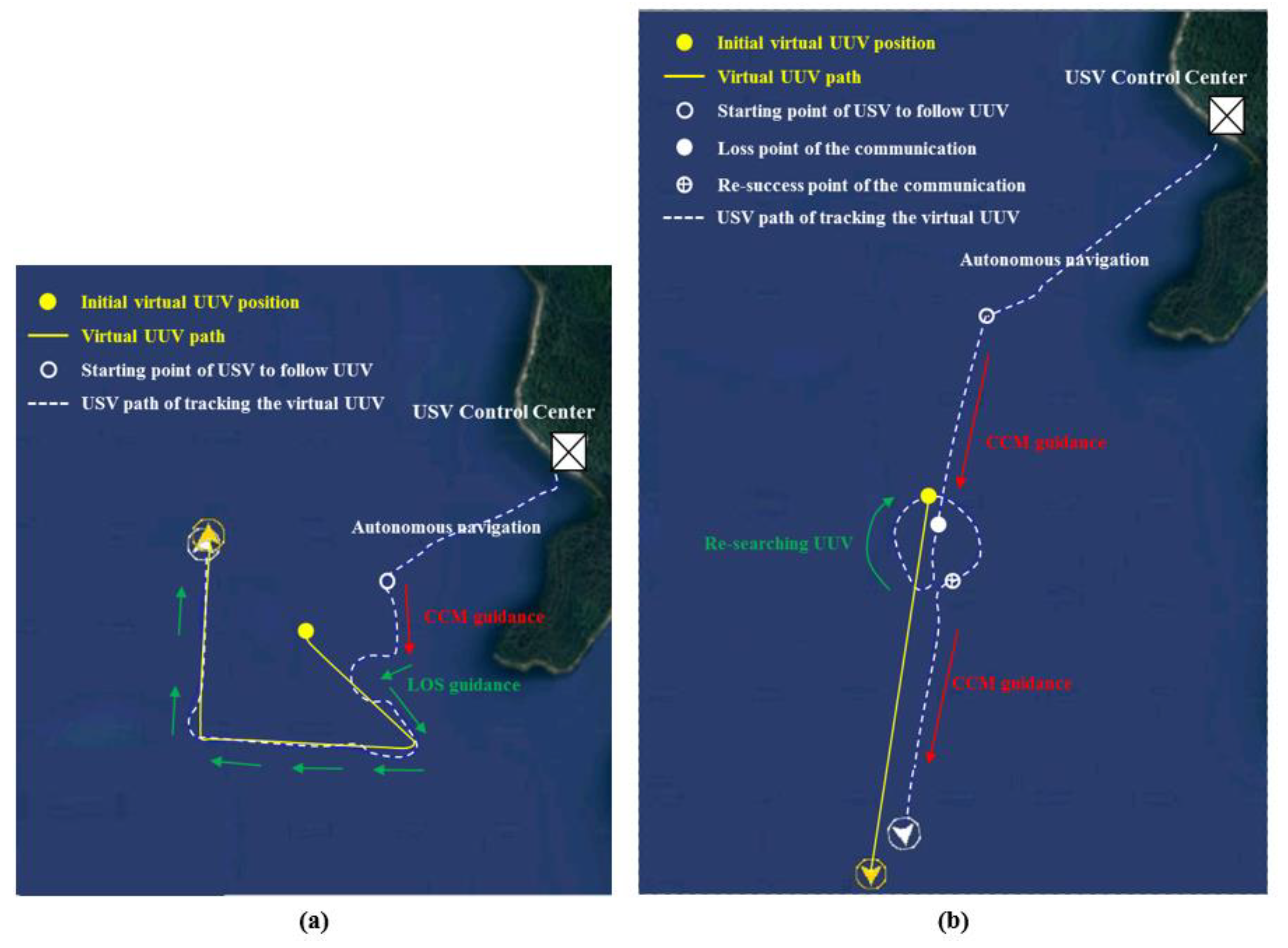
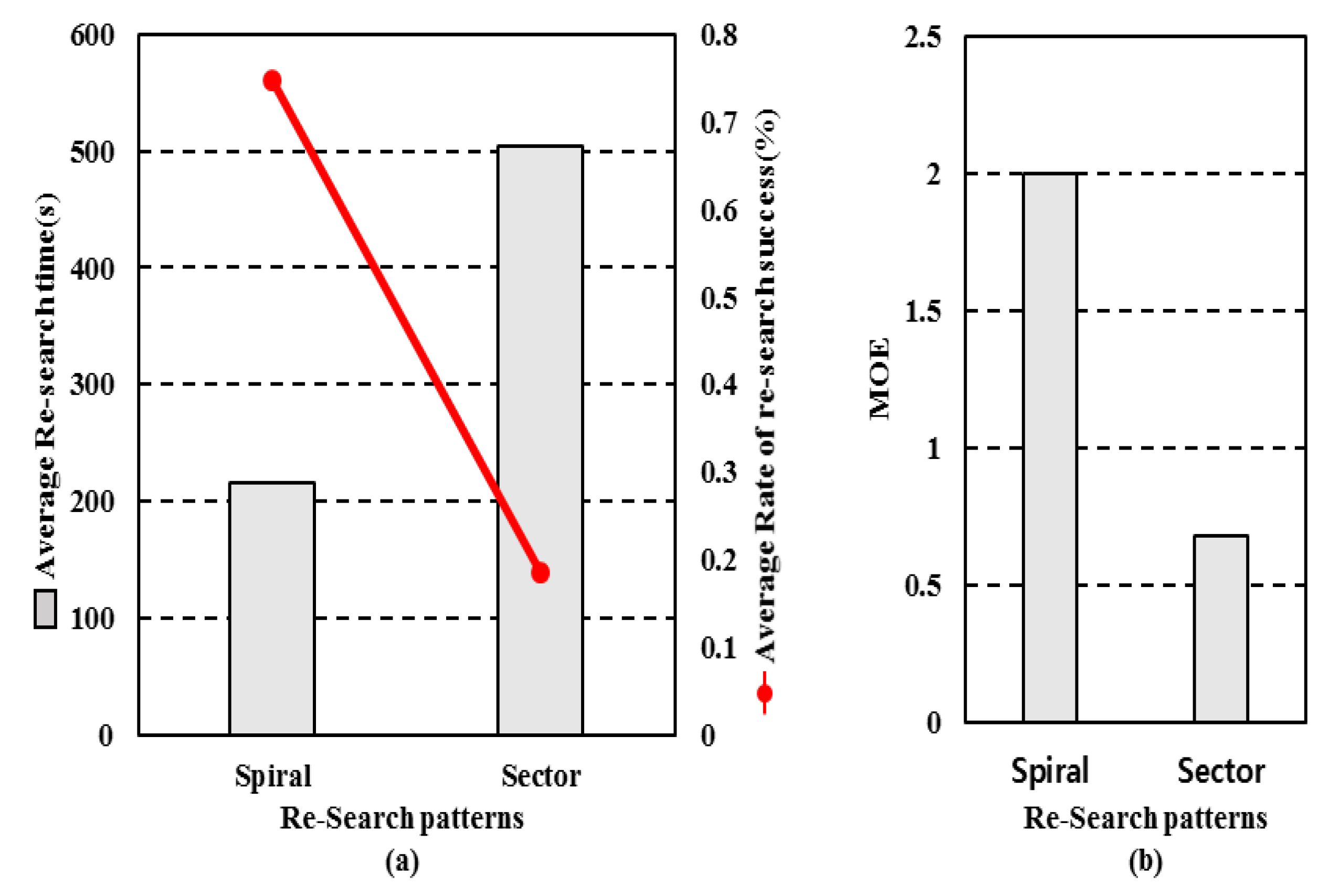
3.3. Re-Search Model
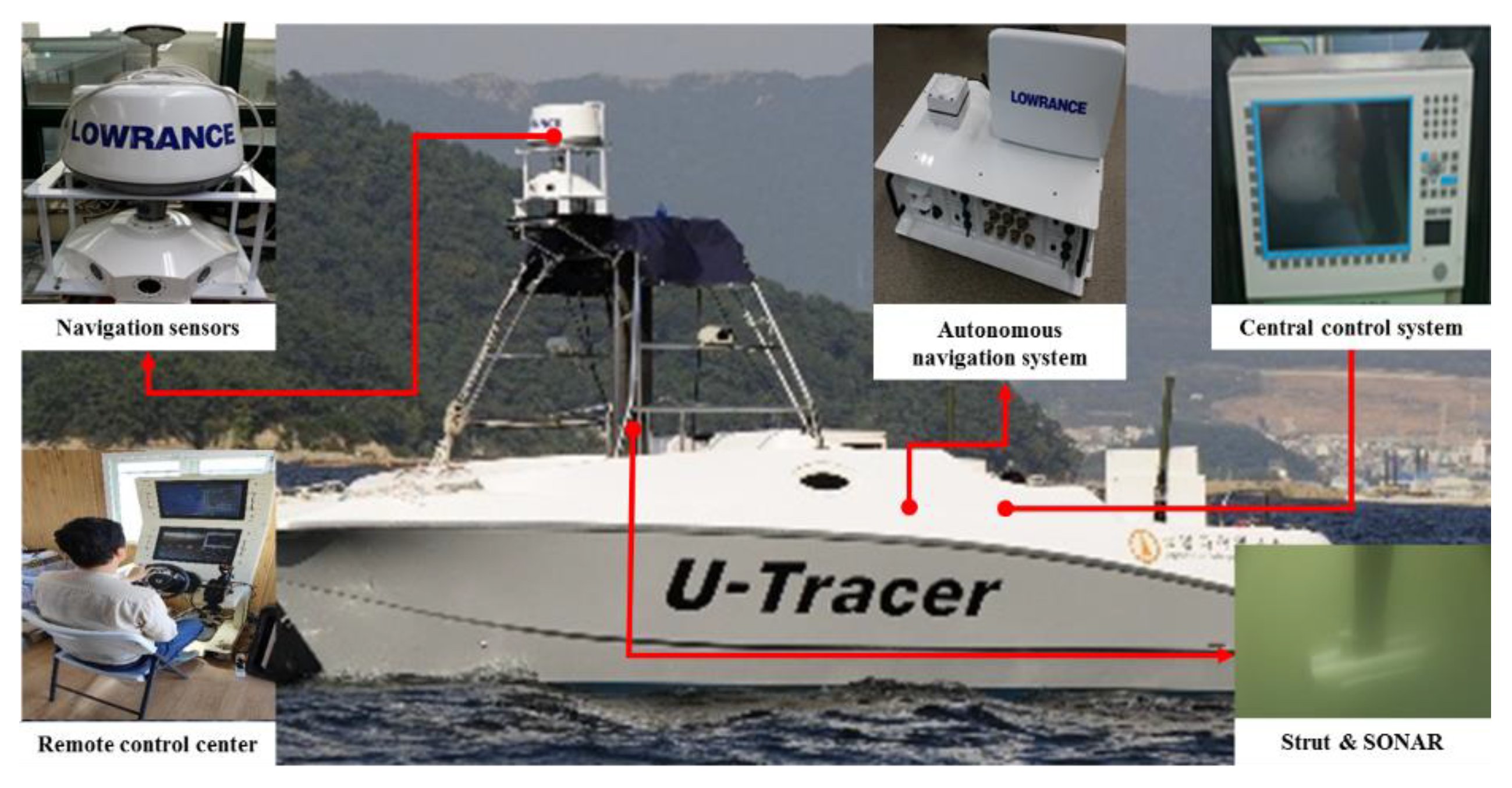
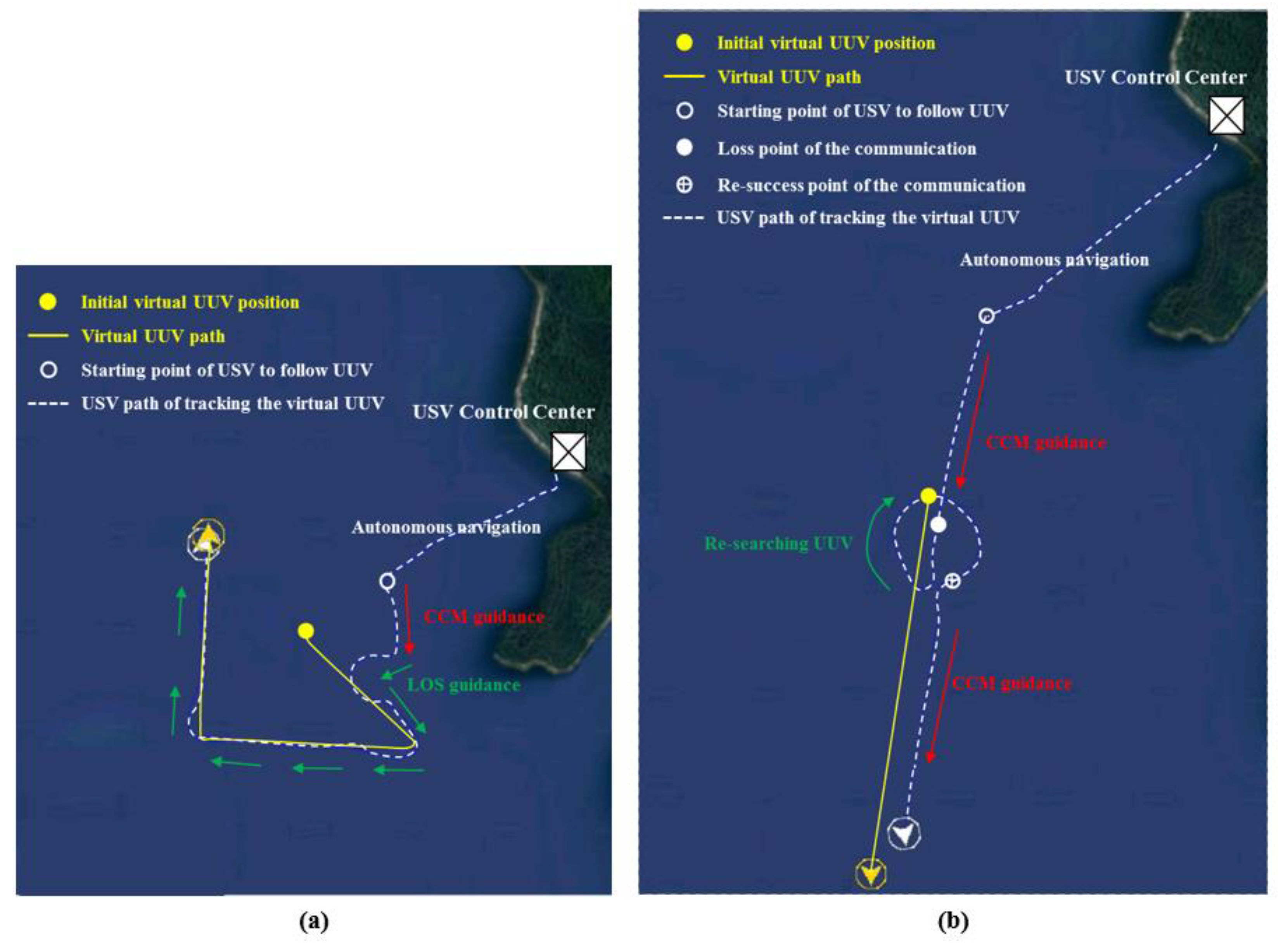
4. Implementation and Results
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sinisterra, A.; Dhanak, M.; Kouvaras, N. A USV Platform for Surface Autonomy. In Proceedings of the OCEANS 2017-Anchorage (IEEE), Anchorage, AK, USA, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Allard, Y.; Shahbazian, E. Unmanned Underwater Vehicle (UUV) Information Study; OODA Technology Inc.: Montreal, QC, Canada, 2014. [Google Scholar]
- Savkin, A.V.; Verma, S.C.; Anstee, S. Optimal navigation of an unmanned surface vehicle and an autonomous underwater vehicle collaborating for reliable acoustic communication with collision avoidance. Drones 2022, 6, 27. [Google Scholar] [CrossRef]
- Martinez, J.L.; Brescia, A.; Mullen, L.; Mulligan, A.; Alley, D.; Lautrup, R.; Platt, D. NIX USV platform for precision track and trail of UUV platforms. Ocean Sens. Monit. XII 2020, 11420, 114200O. [Google Scholar]
- Cen, Y.; Liu, M.; Li, D.; Meng, K.; Xu, H. Double-scale adaptive transmission in time-varying channel for underwater acoustic sensor networks. Sensors 2021, 21, 2252. [Google Scholar] [CrossRef] [PubMed]
- Daxiong, J.; Rong, Z.; Ruiwen, Y.; Hongyu, Z.; Yang, L. A tracking control method of ASV following AUV. In Proceedings of the OCEANS 2014-San Diego (IEEE), San Diego, CA, USA, 23–27 September 2013; pp. 1–8. [Google Scholar]
- Norgren, P.; Ludvigsen, M.; Ingebretsen, T.; Hovstein, V.E. Tracking and remote monitoring of an autonomous underwater vehicle using an unmanned surface vehicle in the Trondheim fjord. In Proceedings of the OCEANS 2015-MTS/IEEE Washington (IEEE), Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar]
- Phillips, A.B.; Salavasidis, G.; Kingsland, M.; Harris, C.; Pebody, M.; Templeton, D.R.R.; McPhail, S.; Prampart, T.; Wood, T.; Taylor, R.; et al. Autonomous surface/subsurface survey system field trials. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–6. [Google Scholar]
- Bibuli, M.; Parodi, O.; Lapierre, L.; Bruzzone, G.; Caccia, M. Vehicle-following guidance for unmanned marine vehicles. In Proceedings of the 8th IFAC International Conference Maneuvering and Control of Marine Craft, Boston, MA, USA, 6–8 July 2009; pp. 103–108. [Google Scholar]
- Melo, J.; Matos, A. Guidance and control of an ASV in AUV tracking operation. In Proceedings of the OCEANS 2008 (IEEE), Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar]
- Yang, T.C. Properties of underwater acoustic communication channels in shallow water. J. Acoust. Soc. Am. 2012, 131, 129–145. [Google Scholar] [CrossRef] [PubMed]
- Kilfoyle, D.B.; Baggeroer, A.B. The state of the art in underwater acoustic telemetry. IEEE J. Ocean. Eng. 2000, 25, 4–27. [Google Scholar] [CrossRef]
- Sameer Babu, T.P.; David Koilpillai, R.; Muralikrishna, P. Underwater acoustic communications: Design considerations at the physical layer based on field trials. In Proceedings of the 2012 National Conference on Communications (NCC), Kharagpur, India, 3–5 February 2012; pp. 1–5. [Google Scholar]
- Elling, L. Performance Analysis of Interacting Multiple Model—Extended Kalman Filters at High Update Rates. Bachelor Thesis, Faculty of Military Sciences Netherlands Defense Academy, Den Helder, The Netherlands, 2016. [Google Scholar]
- Fujii, K. Extended Kalman Filter, The Technical Writer’s Research Paper. The ACFA-Sim-J Group. 2013, pp. 1–56. Available online: https://www-jlc.kek.jp/subg/offl/kaltest/src/KalTest/doc/ReferenceManual.pdf (accessed on 20 February 2022).
- Ribeiro, M.I. Kalman and extended Kalman filters: Concept, derivation and properties. Inst. Syst. Robot. 2004, 43, 46. [Google Scholar]
- Shishan, Y.; Marcus, B. Extended Kalman filter for extended object tracking. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 4386–4390. [Google Scholar]
- Psiaki, M.L. Backward-smoothing extended Kalman filter. J. Guid. Control Dyn. 2005, 28, 885–894. [Google Scholar] [CrossRef]
- Laviola, J.J. Double exponential smoothing: An alternative to Kalman filter-based predictive tracking. In Proceedings of the Workshop on Virtual Environments 2003; pp. 199–206. Available online: https://www.presentica.com/doc/11884235/double-exponential-smoothing-an-alternative-to-kalman-filter-based (accessed on 20 February 2022).
- Gadsden, S.A.; Habibi, S.; Kirubarajan, T. Kalman and smooth variable structure filters for robust estimation. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1038–1050. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; University of Trondheim, Trondheim, Norway; John Wiley & Sons: Chichester, UK, 1999; ISBN 0471941131. [Google Scholar]
- Bakaric, V.; Vukic, Z.; Antonic, R. Improved line-of-sight guidance for cruising underwater vehicles. IFAC Proc. Vol. 2004, 37, 447–452. [Google Scholar] [CrossRef]
- Tahk, M.-J.; Park, C.-S.; Ryoo, C.-K. Line-of-sight guidance laws for formation flight. J. Guid. Control Dyn. 2005, 28, 708–716. [Google Scholar] [CrossRef]
- Liu, S.; Yan, B.; Zhang, X.; Liu, W.; Yan, J. Fractional-order sliding mode guidance law for intercepting hypersonic vehicles. Aerospace 2022, 9, 53. [Google Scholar] [CrossRef]
- Lekkas, A.M.; Fossen, T.I. Line-of-sight guidance for path following of marine vehicles. Adv. Mar. Robot. 2013, 63–92. [Google Scholar]
- Jung, Y.-S. Homing Guidance Laws Based on Speed Control for Anti-Ballistic Missiles. Ph.D. Thesis, Korea Advanced Institute of Science and Technology, Daejeon, Korea, 2019. [Google Scholar]
- Gazit, R. Guidance to collision of a variable-speed missile. In Proceedings of the First IEEE Regional Conference on Aerospace Control Systems, Westlake Village, CA, USA, 25–27 May 1993; pp. 734–737. [Google Scholar]
- Rafferty, K.J. A Comparison Study of Search Heuristics for an Autonomous Multi-Vehicle Air-Sea Rescue System. Ph.D. Thesis, University of Glasgow, Glasgow, Scotland, 2014. [Google Scholar]
- Ferri, G.; Djapic, V. Adaptive mission planning for cooperative autonomous maritime vehicles. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 5586–5592. [Google Scholar]
- Jeon, M.-J.; Yoon, H.-K.; Kang, J.-G. An effectiveness analysis for UUV route re-search pattern of USV based on the simulation. In Proceedings of the 2019 Fall Conference on Korean Marine Robot Technology Society, Gyeongsang, Korea, 18–20 September 2019; pp. 73–77. [Google Scholar]
- Krzysztof, S.K. Automatic control of ship motion conducting search in open waters. Pol. Marit. Res. 2020, 27, 157–169. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Probability Distribution | Unit | |
|---|---|---|---|
| UUV | X (m) | Meter | |
| Y (m) | Degree | ||
| ) | Radian | ||
| ) | Knots | ||
| USV | ATM success rate | - | |
| Method | Distance (m) | V (m/s) | |
|---|---|---|---|
| 11.0658 | 0.9510 | 0.1543 | |
| 7.3921 | 0.5930 | 0.1456 |
| Sub-MOE | Weight (W) |
|---|---|
| FT = Following time | = 1 |
| FS = Following stability | = 1 |
| Variable | Probability Distribution | Unit | ||
|---|---|---|---|---|
| UUV | Initial location | Range (R) | Meter | |
| (α) | Degree | |||
| ) | Degree | |||
| ) | Knots | |||
| Sub-MOE | Weight (W) |
|---|---|
| RT = Re-search time | = 1 |
| RR = Re-search success rate | = 1 |
| Variable | Probability Distribution | Unit | ||
|---|---|---|---|---|
| UUV | Initial location | Range (R) | Meter | |
| (α) | Degree | |||
| ) | Degree | |||
| ) | Knots | |||
| Parameter | Contents | Value |
|---|---|---|
| Scenario | S1 | Estimation/guidance |
| S2 | Estimation/guidance/re-search | |
| Communication (USV—virtual UUV) | Cycle | 5 s |
| 20 counts | ||
| USV | Initial mode | Autonomous navigation |
| Initial velocity | 5 knots | |
| Execution cycle of algorithm | 1 s | |
| Virtual UUV | Initial velocity | 4 knots |
| Maneuvering path | Triangle (S1) | |
| Straight (S2) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, J.-G.; Kim, T.; Kwon, L.; Kim, H.-D.; Park, J.-S. Design and Implementation of a UUV Tracking Algorithm for a USV. Drones 2022, 6, 66. https://doi.org/10.3390/drones6030066
Kang J-G, Kim T, Kwon L, Kim H-D, Park J-S. Design and Implementation of a UUV Tracking Algorithm for a USV. Drones. 2022; 6(3):66. https://doi.org/10.3390/drones6030066
Chicago/Turabian StyleKang, Jong-Gu, Taeyun Kim, Laeun Kwon, Hyeong-Dong Kim, and Jong-Sang Park. 2022. "Design and Implementation of a UUV Tracking Algorithm for a USV" Drones 6, no. 3: 66. https://doi.org/10.3390/drones6030066
APA StyleKang, J.-G., Kim, T., Kwon, L., Kim, H.-D., & Park, J.-S. (2022). Design and Implementation of a UUV Tracking Algorithm for a USV. Drones, 6(3), 66. https://doi.org/10.3390/drones6030066