
A Review of Counter-UAS Technologies for Cooperative Defensive Teams of Drones





Abstract
:1. Introduction
- Sensing system;
- Mitigation system;
- Command and control (C2) system.
2. Definitions and Basic Concepts for Cooperative Drone-Based Counter-UAS Systems
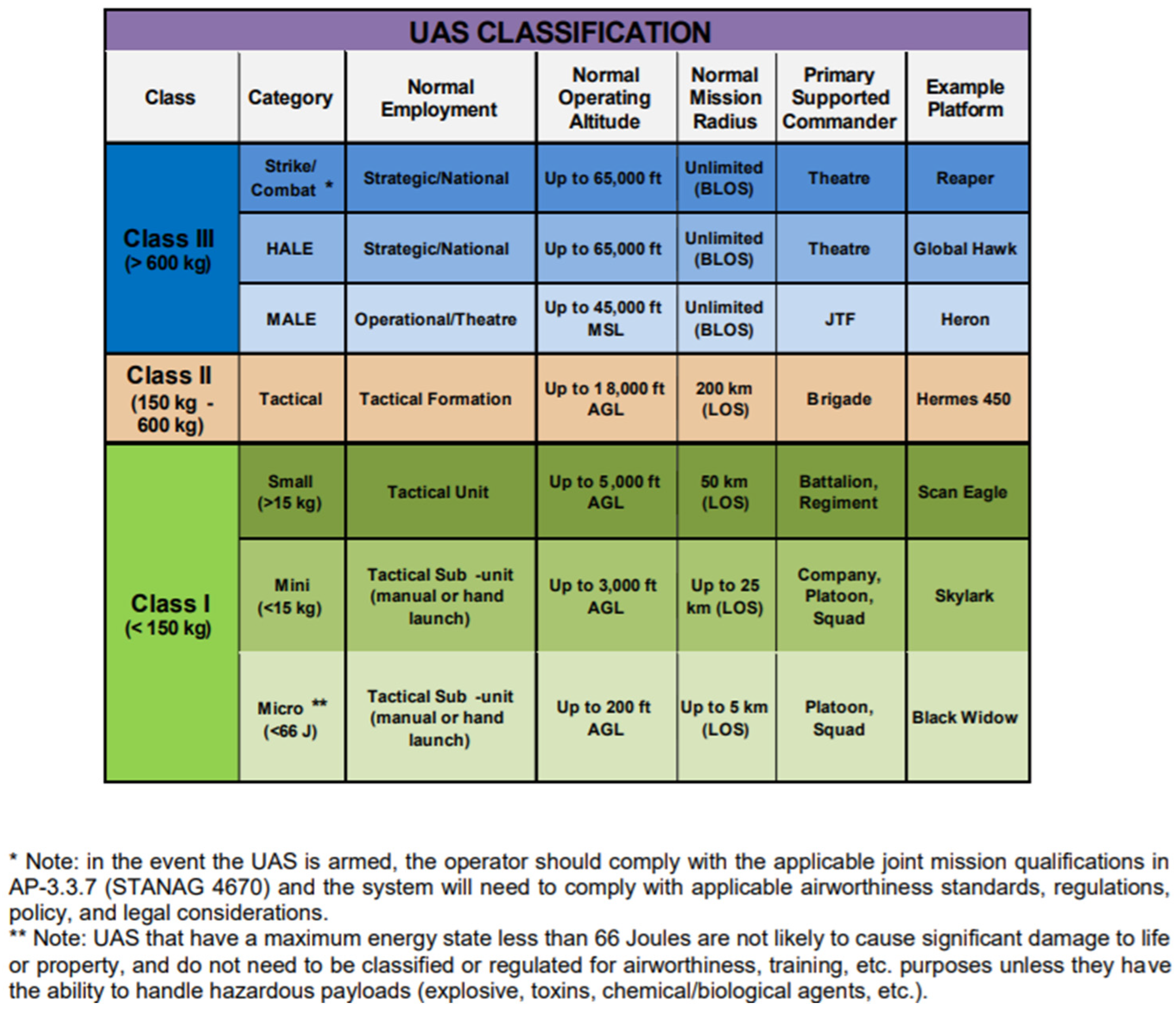
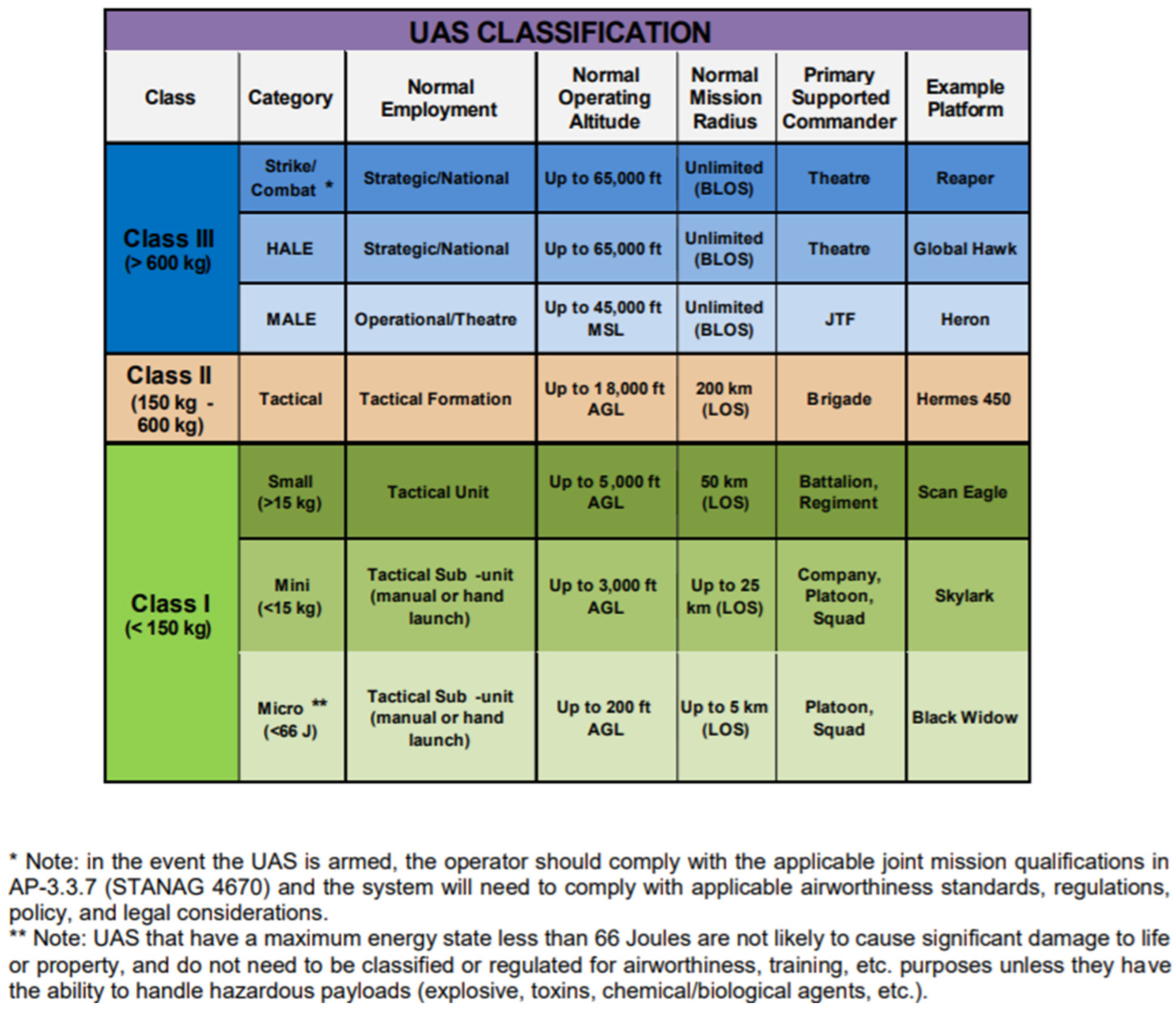
2.1. Drones
- Airframe, which is the mechanical part of the vehicle, including the propulsion system;
- Navigation and motion sensors that collect the information about the drone position and its flight trajectory;
- Flight control system (FCS), which controls the propulsion system and the servos in order to apply a flight trajectory;
- Payload, which is the specific equipment to accomplish a given mission;
- Ground control station (GCS), which is a computer system or a network of computer systems on the ground, which monitor and control UAS operation;
- Communication infrastructure, which is the set of data links and related equipment for the communication between the vehicle and the GCS (or other external elements).
2.2. Multi-Drone Missions
- Isolated individual—in this case, a drone independently acts. It may be piloted, or it may exhibit a given degree of autonomy for the execution of its mission on its own.
- Group—a group of drones comprised of several isolated individuals, each with their own mission without coordination, i.e., collaboration is not present.
- Team—a team of drones is a networked set of drones with a common mission, in which all members are assigned specialized and different tasks to accomplish the global mission.
- Swarm—a swarm of drones is a uniform mass of undifferentiated drones. Thus, a swarm is typically composed of a large number of homogeneous drones, which perform a single task.
- Multiple simultaneous interventions—the system may simultaneously collect data from multiple locations.
- Efficiency—the system may split up in order to efficiently cover a large area, optimizing available resources.
- Complementarity—the system may perform different tasks with growing accuracy. Clearly, this feature holds for drone teams.
- Reliability—the system assures fault-tolerant missions by providing redundancy and capability of reconfiguration in the case of a failure of individual vehicles.
- Safety—the team or swarm may usually apply the smallest vehicles for a mission with respect to the equivalent single-drone mission. For a permit to fly, the usage of smaller drones is safer than a single great and heavy drone.
- Cost efficiency—a single vehicle to execute some tasks may be an expensive solution when compared with several low-cost vehicles.
2.3. Counter-UAS Systems
2.4. Cooperative Drone-Based Counter-UAS Systems
3. Sensing System
- Detection: The finding of one or more object within the airspace to be monitored. In this first phase, the system is not yet able to distinguish whether the detected object is actually a drone. This phase can be characterized through the two indicators “Detection Rate” and “False Alarm Rate”, which express the probability, respectively, of correct detection and false alarm.
- Classification: Once the detection event has occurred, it is necessary to verify that the detected object is actually present and that it is a drone. It could happen, for example, that the target detected in the previous phase is a bird, which has electromagnetic characteristics that can be similar to those of a drone (the radar cross section or the size and geometric shape that is possible recognize visually). This verification is also called “recognition” or “identification”. Subsequently, the system extrapolates some salient attributes (features) of the drone, such as the type (size, type of propulsion, number of rotors, model), the possible location of a remote pilot, the presence of a payload and its typology. This phase may be found in the literature under the term “identification”.
- Localization/Tracking: The target is located by estimating its position in terms of angle and distance. Triangulation techniques can be used to increase accuracy. Once the target has been locked in, it must be tracked throughout its flight. Flight trajectory could also be predicted.
3.1. Sensing Technologies
3.1.1. Acoustic Sensors
3.1.2. Radio Frequency Sensors
3.1.3. Optical Sensors
- Single-shot multi-box detectors (SSD)
- Faster R-CNN
3.1.4. LiDAR Sensors
3.1.5. Radar Sensors
3.2. Sensing Technologies Comparison
4. Neutralization Systems
- Electronic neutralizers, based on the use of electromagnetic waves capable of interrupting (operations), disabling or even destroying (at least partially) a drone;
- Kinetic-mechanical neutralizers, based on the use of mechanical means, which involve contact between the neutralizer (or a part of it) and the malicious drone.
4.1. Electronic Neutralizers
4.1.1. Radio Frequency Jamming
4.1.2. GNSS Jamming
4.1.3. Spoofing
4.1.4. Neutralizers Exploiting Protocol-Based Attacks and Replay Attacks
4.1.5. High-Power Electromagnetics and Lasers
4.2. Kinetic-Mechanical Neutralizers
4.2.1. Neutralizers Based on Projectiles
4.2.2. Collision UAVs
4.2.3. Nets
4.3. Neutralizers Using Mini Drones
4.4. Comparison of the Neutralizers
5. Command and Control Systems
- Providing a classification of the attack scenario to assess its threat level, based on the feedbacks coming from the sensing system;
- Granting permission to fly over a specific protected area (for non-malicious drones);
- Selecting the proper mitigation techniques to be used based on the attack scenario and its threat level;
- Planning CUS operations and monitoring their execution.
- Computing the set of tasks to be carried out to counter the identified threat;
- Processing the optimal schedule (i.e., assignment and ordering) of the tasks, e.g., the allocation and the sequencing of the target areas to be protected and of the vehicle counter activities (in terms of detection, identification, classification, tracking and neutralization) to be executed;
- Operating over the entire time horizon and space horizon of the threat resolution.
6. Technological Challenges
6.1. Team Coordination
- A single agent solves the overall problem; or
- All the agents solve the same overall problem; or
- The agents employ a wide number of communications (or a wide communication band) to plan their coordinated actions; or
- The agents exchange full plans.
6.2. Team Communication Network
- Routing—the algorithms used must be able to support a routing table capable of rapidly adapting to the continuous topological variations of the network due to the mobility of drones. A survey of routing techniques in FANETs is shown in [112].
- Reliability and security—the network must ensure availability and integrity (and, depending on the application, confidentiality) of the communication between the nodes, characteristics that can be obtained both by operating at a physical level and at some higher levels.
- Scalability—some network drones competing in the execution of a task may need to be replaced for technical reasons or due to the exhaustion of their energy resources, so it is necessary to add other drones to the team to efficiently complete the assigned task.
- Quality of service—different performances must be guaranteed according to the type of information transmitted and the level of criticality.
- Placement—the drones may need to be appropriately arranged in the 3D space in order to maximize the amount of information exchanged and minimize the time required for the exchange, so as to satisfy any energy constraints characterizing the nodes themselves. Clearly, this aspect also falls within the problem of coordination.
6.3. Team Simulation Framework
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Federal Aviation Administration. Available online: https://www.faa.gov/uas/resources/uas-sightings-report/ (accessed on 10 October 2021).
- CBNC. Available online: https://www.cnbc.com/2018/12/20/drone-sightings-shut-down-britains-gatwick-airport.html (accessed on 10 October 2021).
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Nato Standardization Office (NSO). NATO Standard AJP-3.3. Allied Joint Doctrine for Air and Space Operations. Edition B Version 1. April 2016. Available online: https://www.japcc.org/wp-content/uploads/AJP-3.3-EDB-V1-E.pdf (accessed on 14 February 2022).
- Lykou, G.; Moustakas, D.; Gritzalis, D. Defending Airports from UAS: A Survey on Cyber-Attacks and Counter-Drone Sensing Technologies. Sensors 2020, 20, 3537. [Google Scholar] [CrossRef] [PubMed]
- Lopez, J.; Royo, P.; Barrado, C.; Pastor, E. Modular avionics for seamless reconfigurable UAS missions. In Proceedings of the 2008 IEEE/AIAA 27th Digital Avionics Systems Conference, St. Paul, MN, USA, 26–30 October 2008; pp. 1.A.3-1–1.A.3-10. [Google Scholar] [CrossRef] [Green Version]
- Beaudoin, L.; Gademer, A.; Avanthey, L.; Germain, V.; Vittori, V. Potential Threats of UAS Swarms and the Countermeasure’s Need. In Proceedings of the European Conference on Information Warfare and Security (ECIW), Tallinn, Estonia, 7–8 July 2011; pp. 24–30. [Google Scholar]
- Gigante, G.; Pascarella, D.; Luongo, S.; Di Benedetto, C.; Vozella, A.; Persechino, G. Game-theoretic approach for the optimal configuration computing of an interoperable fleet of unmanned vehicles. Expert Syst. 2018, 35, e12293. [Google Scholar] [CrossRef]
- Kang, H.; Joung, J.; Kim, J.; Kang, J.; Cho, Y.S. Protect Your Sky: A Survey of Counter Unmanned Aerial Vehicle Systems. IEEE Access 2020, 8, 168671–168710. [Google Scholar] [CrossRef]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad Hoc Netw. 2020, 111, 102324. [Google Scholar] [CrossRef] [PubMed]
- Samaras, S.; Diamantidou, E.; Ataloglou, D.; Sakellariou, N.; Vafeiadis, A.; Magoulianitis, V.; Lalas, A.; Dimou, A.; Zarpalas, D.; Votis, K.; et al. Deep Learning on Multi Sensor Data for Counter UAV Applications—A Systematic Review. Sensors 2019, 19, 4837. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Liu, Y.; Song, H. Counter-Unmanned Aircraft System(s) (C-UAS): State of the Art, Challenges, and Future Trends. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 4–29. [Google Scholar] [CrossRef]
- Seongjoon, P.; Hyeong, T.K.; Sanagmin, L.; Hyeontae, J.; Hwangnam, K. Survey on Anti-Drone Systems: Components, Designs, and Challenges. IEEE Access 2021, 9, 42635–42659. [Google Scholar]
- Brust, M.R.; Danoy, G.; Stolfi, D.H.; Bouvry, P. Swarm-Based Counter UAV Defense System. Discov. Internet Things 2021, 1, 2. [Google Scholar] [CrossRef]
- Dressel, L.; Kochenderfer, M.J. Hunting Drones with Other Drones: Tracking a Moving Radio Target. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Brust, M.R.; Danoy, G.; Bouvry, P.; Gashi, D.; Pathak, H.; Goncalves, M.P. Defending against Intrusion of Malicious UAVs with Networked UAV Defense Swarms. In Proceedings of the 2017 IEEE 42nd Conference on Local Computer Networks Workshops (LCN Workshops), Singapore, 9 October 2017. [Google Scholar]
- Khan, A.; Rinner, B.; Cavallaro, A. Cooperative robots to observe moving targets. IEEE Trans. Cybern. 2016, 48, 187–198. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, X.; Wang, C.; Cong, Y.; Shen, L. Systemic design of distributed multi-UAV cooperative decision-making for multi-target tracking. Auton. Agents Multi-Agent Syst. 2019, 33, 132–158. [Google Scholar] [CrossRef]
- Sinha, A.; Tsourdos, A.; White, B. Multi UAV Coordination for Tracking the Dispersion of a Contaminant Cloud in an Urban Region. Eur. J. Control 2009, 15, 441–448. [Google Scholar] [CrossRef]
- ResponDrone, Situational Awareness System for First Responders. Available online: https://respondroneproject.com/ (accessed on 13 February 2022).
- ROBORDER. Available online: https://roborder.eu/ (accessed on 13 February 2022).
- Labyrinth, Ensuring Drone Traffic Control and Safety. Available online: https://labyrinth2020.eu/ (accessed on 13 February 2022).
- 5D-AeroSafe. Available online: https://5d-aerosafe.eu/ (accessed on 13 February 2022).
- DRONES4SAFETY, Building a Cooperative, Autonomous, Operating Drone System to Enhance Transport Safety. Available online: https://drones4safety.eu/ (accessed on 13 February 2022).
- RAPID, Risk-Aware Autonomous Port Inspection Drones. Available online: https://rapid2020.eu/ (accessed on 13 February 2022).
- Pozniak, M.; Ranganathan, P. Counter UAS Solutions through UAV Swarm Environments. In Proceedings of the 2019 IEEE International Conference on Electro Information Technology (EIT), Brookings, SD, USA, 20–22 May 2019; pp. 351–356. [Google Scholar] [CrossRef]
- Pascarella, D.; Gigante, G.; Persechino, G.; Vozella, A. SWADAR (SWarm Advanced Detection and Tracking) Factsheet. 2020. Available online: https://www.edrmagazine.eu/wp-content/uploads/2020/12/EDA2020-Prize_SWADAR.pdf (accessed on 14 February 2022).
- Keeping a Watchful Eye on Low-Flying Unmanned Aerial Systems in Cities. Available online: https://www.darpa.mil/news-events/2016-09-13 (accessed on 13 February 2022).
- JEY-CUAS, Joint European System for Countering Unmanned Aerial Systems. Available online: https://ec.europa.eu/defence-industry-space/system/files/2021-06/EDIDP2020_factsheet_CUAS_JEY-CUAS.pdf (accessed on 13 February 2022).
- Liu, Q.; He, M.; Xu, D.; Ding, N.; Wang, Y. A Mechanism for Recognizing and Suppressing the Emergent Behavior of UAV Swarm. Math. Probl. Eng. 2018, 2018, 6734923. [Google Scholar] [CrossRef]
- Besada, J.A.; Campaña, I.; Carramiñana, D.; Bergesio, L.; de Miguel, G. Review and Simulation of Counter-UAS Sensors for Unmanned Traffic Management. Sensors 2022, 22, 189. [Google Scholar] [CrossRef]
- Hoshiba, K.; Washizaki, K.; Wakabayashi, M.; Ishiki, T.; Kumon, M.; Bando, Y.; Gabriel, D.; Nakadai, K.; Okuno, H.G. Design of UAV-Embedded Microphone Array System for Sound Source Localization in Outdoor Environments. Sensors 2017, 17, 2535. [Google Scholar] [CrossRef] [Green Version]
- Salvati, D.; Drioli, C.; Ferrin, G.; Foresti, G.L. Acoustic Source Localization from Multirotor UAVs. IEEE Trans. Ind. Electron. 2020, 67, 8618–8628. [Google Scholar] [CrossRef]
- Guo, J.; Ahmad, I.; Chang, K. Classification, positioning, and tracking of drones by HMM using acoustic circular microphone array beamforming. J. Wirel. Commun. Netw. 2020, 2020, 9. [Google Scholar] [CrossRef]
- Cabrera-Ponce, A.A.; Martinez-Carranza, J.; Rascon, C. Detection of Nearby UAVs Using a Multi-Microphone Array on Board a UAV. Int. J. Micro Air Veh. 2020, 12, 1756829320925748. [Google Scholar] [CrossRef]
- Benyamin, M.; Goldman, G.H. Acoustic Detection and Tracking of a Class I UAS with a Small Tetrahedral Microphone Array; US Army Research Laboratory: Adelphi, MD, USA, 2014. [Google Scholar]
- Chang, X.; Yang, C.; Wu, J.; Shi, X.; Shi, Z. A Surveillance System for Drone Localization and Tracking Using Acoustic Arrays. In Proceedings of the 2018 IEEE 10th Sensor Array and Multichannel Signal Processing Workshop (SAM), Sheffield, UK, 8–11 July 2018. [Google Scholar]
- Busset, J.; Perrodin, F.; Wellig, P.; Ott, B.; Heutschi, K.; Rühl, T.; Nussbaumer, T. Detection and Tracking of Drones Using Advanced Acoustic Cameras. In Unmanned/Unattended Sensors and Sensor Networks XI; and Advanced Free-Space Optical Communication Techniques and Applications; SPIE: Bellingham, WA, USA, 2015; Volume 9647. [Google Scholar]
- Sedunov, A.; Haddad, D.; Salloum, H.; Sutin, A.; Sedunov, N.; Yakubovskiy, A. Stevens Drone Detection Acoustic System and Experiments in Acoustics UAV Tracking. In Proceedings of the 2019 IEEE International Symposium on Technologies for Homeland Security (HST), Woburn, MA, USA, 5–6 November 2019. [Google Scholar]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I. Micro-UAV Detection and Classification from RF Fingerprints Using Machine Learning Techniques. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019. [Google Scholar]
- Fu, H.; Abeywickrama, S.; Zhang, L.; Yuen, C. Low-Complexity Portable Passive Drone Surveillance via SDR-Based Signal Processing. IEEE Commun. Mag. 2018, 56, 112–118. [Google Scholar] [CrossRef]
- Oliveira, M.T.; Miranda, R.K.; da Costa, J.P.C.L.; de Almeida, A.L.F.; de Sousa, R.T. Low Cost Antenna Array Based Drone Tracking Device for Outdoor Environments. Wirel. Commun. Mob. Comput. 2019, 2019, 5437908. [Google Scholar] [CrossRef]
- Mototolea, D.; Stolk, C. Detection and Localization of Small Drones Using Commercial off-the Shelf Fpga Based Software Defined Radio Systems. In Proceedings of the 2018 International Conference on Communications (COMM), Bucharest, Romania, 14–16 June 2018; pp. 465–470. [Google Scholar]
- Koohifar, F.; Guvenc, I.; Sichitiu, M.L. Autonomous Tracking of Intermittent RF Source Using a UAV Swarm. IEEE Access 2018, 6, 15884–15897. [Google Scholar] [CrossRef]
- Azari, M.M.; Sallouha, H.; Chiumento, A.; Rajendran, S.; Vinogradov, E.; Pollin, S. Key Technologies and System Trade-Offs for Detection and Localization of Amateur Drones. IEEE Commun. Mag. 2018, 56, 51–57. [Google Scholar] [CrossRef] [Green Version]
- Andraši, P.; Radišić, T.; Muštra, M.; Ivošević, J. Night-Time Detection of UAVs Using Thermal Infrared Camera. Transp. Res. Procedia 2017, 28, 183–190. [Google Scholar] [CrossRef]
- Birch, G.C.; Woo, B.L. Counter Unmanned Aerial Systems Testing: Evaluation of VIS SWIR MWIR and LWIR Passive Imagers; Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2017.
- Goecks, V.G.; Woods, G.; Valasek, J. Combining Visible and Infrared Spectrum Imagery Using Machine Learning for Small Unmanned Aerial System Detection. In Automatic Target Recognition XXX; Overman, T.L., Hammoud, R.I., Mahalanobis, A., Eds.; SPIE: Bellingham, WA, USA, 2020. [Google Scholar]
- Opromolla, R.; Fasano, G.; Accardo, D. A Vision-Based Approach to UAV Detection and Tracking in Cooperative Applications. Sensors 2018, 18, 3391. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Ye, D.H.; Chung, T.; Kolsch, M.; Wachs, J.; Bouman, C. Multi-Target Detection and Tracking from a Single Camera in Unmanned Aerial Vehicles (UAVs). In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Saqib, M.; Daud Khan, S.; Sharma, N.; Blumenstein, M. A study on detecting drones using deep convolutional neural networks. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–5. [Google Scholar]
- Nalamati, M.; Kapoor, A.; Saqib, M.; Sharma, N.; Blumenstein, M. Drone Detection in Long-Range Surveillance Videos. In Proceedings of the 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Taipei, Taiwan, 18–21 September 2019; pp. 1–6. [Google Scholar]
- Aker, C.; Kalkan, S. Using deep networks for drone detection. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar]
- Kim, B.H.; Khan, D.; Bohak, C.; Choi, W.; Lee, H.J.; Kim, M.Y. V-RBNN Based Small Drone Detection in Augmented Datasets for 3D LADAR System. Sensors 2018, 18, 3825. [Google Scholar] [CrossRef] [Green Version]
- Hammer, M.; Hebel, M.; Borgmann, B.; Laurenzis, M.; Arens, M. Potential of Lidar Sensors for the Detection of UAVs. In Laser Radar Technology and Applications XXIII; Turner, M.D., Kamerman, G.W., Eds.; SPIE: Bellingham, WA, USA, 2018. [Google Scholar]
- Hammer, M.; Borgmann, B.; Hebel, M.; Arens, M. UAV Detection, Tracking, and Classification by Sensor Fusion of a 360° Lidar System and an Alignable Classification Sensor. In Laser Radar Technology and Applications XXIV; Turner, M.D., Kamerman, G.W., Eds.; SPIE: Bellingham, WA, USA, 2019. [Google Scholar]
- Wei, P.; Cagle, L.; Reza, T.; Ball, J.; Gafford, J. LiDAR and Camera Detection Fusion in a Real-Time Industrial Multi-Sensor Collision Avoidance System. Electronics 2018, 7, 84. [Google Scholar] [CrossRef] [Green Version]
- Zheng, L.; Zhang, P.; Tan, J.; Li, F. The Obstacle Detection Method of UAV Based on 2D Lidar. IEEE Access 2019, 7, 163437–163448. [Google Scholar] [CrossRef]
- Chen, V.C.; Li, F.; Ho, S.S.; Wechsler, H. Analysis of Micro-Doppler Signatures. IEE Proc.-Radar Sonar Navigat. 2003, 150, 271–276. [Google Scholar] [CrossRef]
- Drozdowicz, J.; Wielgo, M.; Samczynski, P.; Kulpa, K.; Krzonkalla, J.; Mordzonek, M.; Bryl, M.; Jakielaszek, Z. 35 GHz FMCW Drone Detection System. In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016. [Google Scholar]
- Caris, M.; Johannes, W.; Stanko, S.; Pohl, N. Millimeter Wave Radar for Perimeter Surveillance and Detection of MAVs (Micro Aerial Vehicles). In Proceedings of the 2015 16th International Radar Symposium (IRS), Dresden, Germany, 24–26 June 2015. [Google Scholar]
- Guvenc, I.; Ozdemir, O.; Yapici, Y.; Mehrpouyan, H.; Matolak, D. Detection, Localization, and Tracking of Unauthorized UAS and Jammers. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017. [Google Scholar]
- Lazzari, F.; Buffi, A.; Nepa, P.; Lazzari, S. Numerical Investigation of an UWB Localization Technique for Unmanned Aerial Vehicles in Outdoor Scenarios. IEEE Sens. J. 2017, 17, 2896–2903. [Google Scholar] [CrossRef]
- Oh, B.-S.; Guo, X.; Lin, Z. A UAV Classification System Based on FMCW Radar Micro-Doppler Signature Analysis. Expert Syst. Appl. 2019, 132, 239–255. [Google Scholar] [CrossRef]
- Coluccia, A.; Parisi, G.; Fascista, A. Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review. Sensors 2020, 20, 4172. [Google Scholar] [CrossRef]
- Molchanov, P.; Egiazarian, K.; Astola, J.; Harmanny, R.I.A.; Wit, J.J.M. Classification of Small UAVs and Birds by Mi-Cro-Doppler Signatures. In Proceedings of the 2013 European Radar Conference, Nuremberg, Germany, 9–11 October 2013; pp. 172–175. [Google Scholar]
- Fioranelli, F.; Ritchie, M.; Griffiths, H.; Borrion, H. Classification of Loaded/Unloaded Micro-drones Using Multistatic Radar. Electron. Lett. 2015, 51, 1813–1815. [Google Scholar] [CrossRef] [Green Version]
- Yasin, J.N.; Mohamed, S.A.S.; Haghbayan, M.-H.; Heikkonen, J.; Tenhunen, H.; Plosila, J. Unmanned Aerial Vehicles (UAVs): Collision Avoidance Systems and Approaches. IEEE Access 2020, 8, 105139–105155. [Google Scholar] [CrossRef]
- Shi, X.; Yang, C.; Xie, W.; Liang, C.; Shi, Z.; Chen, J. Anti-Drone System with Multiple Surveillance Technologies: Architecture, Implementation, and Challenges. IEEE Commun. Mag. 2018, 56, 68–74. [Google Scholar] [CrossRef]
- Luo, A. Drones Hijacking—Multi-Dimensional Attack Vectors and Countermeasures. In Proceedings of the DEFCON 24 Conference, Las Vegas, NV, USA, 4–7 August 2016; Available online: https://www.youtube.com/watch?v=R6RZ5KqSVcg (accessed on 28 February 2022).
- Dong, L.; Han, Z.; Petropulu, A.P.; Poor, H.V. Cooperative jamming for wireless physical layer security. In Proceedings of the 2009 IEEE/SP 15th Workshop on Statistical Signal Processing, Cardiff, UK, 31 August–3 September 2009. [Google Scholar]
- Li, K.; Voicu, R.C.; Kanhere, S.S.; Ni, W.; Tovar, E. Energy efficient legitimate wireless surveillance of UAV communications. IEEE Trans. Veh. Technol. 2019, 68, 2283–2293. [Google Scholar] [CrossRef]
- Lichtman, M.; Poston, J.D.; Amuru, S.; Shahriar, C.; Clancy, T.C.; Buehrer, R.M.; Reed, J.H. A communications jamming taxonomy. IEEE Secur. Priv. 2016, 14, 47–54. [Google Scholar] [CrossRef]
- Junfei, Y.; Jingwen, L.; Bing, S.; Yuming, J. Barrage jamming detection and classification based on convolutional neural network for synthetic aperture radar. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 4583–4586. [Google Scholar]
- Parlin, K.; Alam, M.M.; Le Moullec, Y. Jamming of UAV Remote Control Systems Using Software Defined Radio. In Proceedings of the 2018 International Conference on Military Communications and Information Systems (ICMCIS), Warsaw, Poland, 22–23 May 2018. [Google Scholar]
- Nguyen, D.; Sahin, C.; Shishkin, B.; Kandasamy, N.; Dandekar, K.R. A real-time and protocol-aware reactive jamming framework built on software-defined radios. In Proceedings of the 2014 ACM Workshop on Software Radio Implementation Forum, Chicago, IL, USA, 18 August 2014; pp. 15–22. [Google Scholar]
- Karhima, T.; Silvennoinen, A.; Hall, M.; Haggman, S.-G. IEEE 802.11 b/g WLAN tolerance to jamming. In Proceedings of the Military Communications Conference, IEEE MILCOM 2004, Monterey, CA, USA, 31 October–3 November 2004; Volume 3, pp. 1364–1370. [Google Scholar]
- DroneShield, DroneGun Tactical. Available online: https://www.droneshield.com/dronegun-tactical (accessed on 4 June 2021).
- Blighter, AUDS Anti-UAV Defence System. Available online: https://www.blighter.com/products/auds-anti-uav-defence-system/ (accessed on 4 June 2021).
- MCTECH, MC-HORIZON D360 v3 Battle Proven Reactive Anti-Drone/Quadcopter/Small UAV Jamming System. Available online: https://mctech-jammers.com/products/mc-horizon/mc-horizon-d360.html (accessed on 4 June 2021).
- Mpitziopoulos, A.; Gavalas, D.; Konstantopoulos, C.; Pantziou, G. A Survey on Jamming Attacks and Countermeasures in WSNs. IEEE Commun. Surv. Tutor. 2009, 11, 42–56. [Google Scholar] [CrossRef]
- Robinson, M. Knocking My Neighbors Kids Cruddy Drone Offline. DEF CON 23. Available online: https://academic.csuohio.edu/yuc/mobile/GPS-Knocking-My-Neighbors-Kid-Drone-compressed.pdf (accessed on 4 June 2021).
- Ferreira, R.; Gaspar, J.; Sebstiao, P.; Souto, N. Effective GPS Jamming Techiniques for UAVs using Low Cost SDR Platforms. Wirel. Pers. Commun. 2020, 115, 2705–2727. [Google Scholar] [CrossRef]
- Summers, N. Icarus Machine Can Commandeer a Drone Mid-Flight. October 2016. Available online: https://www.engadget.com/2016-10-28-icarus-hijack-dmsx-drones.html?guccounter=1 (accessed on 4 June 2021).
- Moskvitch, K. Are Drones the Next Target for Hackers? 2014. Available online: https://www.bbc.com/future/article/20140206-candrones-be-hacked (accessed on 4 June 2021).
- Noh, J.; Kwon, Y.; Son, Y.; Shin, H.; Kim, D.; Choi, J.; Kim, Y. Tractor beam: Safe-hijacking of consumer drones with adaptive GPS spoofing. ACM Trans. Priv. Secur. 2019, 22, 12:1–12:26. [Google Scholar] [CrossRef]
- He, D.; Qiao, Y.; Chen, S.; Du, X.; Chen, W.; Zhu, S.; Guizani, M. A friendly and low-cost technique for capturing non-cooperative civilian unmanned aerial vehicles. IEEE Netw. 2018, 33, 146–151. [Google Scholar] [CrossRef]
- Vervisch-Picois, A.; Samama, N.; Taillandier-Loize, T. Influence of GNSS spoofing on drone in automatic flight mode. In Proceedings of the ITSNT 2017: 4th International Symposium of Navigation and Timing, Toulouse, France, 14–17 November 2017; pp. 1–9. [Google Scholar]
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned aircraft capture and control via GPS spoofing. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Humphreys, T.E. Detection Strategy for Cryptographic GNSS Anti-Spoofing. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1073–1090. [Google Scholar] [CrossRef]
- Nassi, B.; Shabtai, A.; Masuoka, R.; Elovici, Y. SoK—Security and Privacy in the Age of Drones: Threats, Challenges, Solution Mechanisms, and Scientific Gaps. arXiv 2019, arXiv:1903.05155. [Google Scholar]
- Son, Y.; Shin, H.; Kim, D.; Park, Y.-S.; Noh, J.; Choi, K.; Choi, J.; Kim, Y. Rocking drones with intentional sound noise on gyroscopic sensors. In Proceedings of the 24th USENIX Security Symposium, Washington, DC, USA, 12–14 August 2015; pp. 881–896. [Google Scholar]
- Davidson, D.; Wu, H.; Jellinek, R.; Singh, V.; Ristenpart, T. Controlling UAVs with sensor input spoofing attacks. In Proceedings of the WOOT 10th USENIX Conference on Offensive Technologies, Austin, TX, USA, 8–9 August 2016; pp. 221–231. [Google Scholar]
- Hooper, M.; Tian, Y.; Zhou, R.; Cao, B.; Lauf, A.P.; Watkins, L.; Robinson, W.H. Securing commercial WiFi-based UAVs from common security attacks. In Proceedings of the MILCOM 2016—2016 IEEE Military Communications Conference, Baltimore, MD, USA, 1–3 November 2016. [Google Scholar]
- Rodday, N. Hacking a professional drone. In Proceedings of the Black Hat ASIA 2016, Singapore, 29 March–1 April 2016. [Google Scholar]
- Highnam, K.; Angstadt, K.; Leach, K.; Weimer, W.; Paulos, A.; Hurley, P. An uncrewed aerial vehicle attack scenario and trustworthy repair architecture. In Proceedings of the 46th Annual IEEE/IFIP, International Conference on Dependable Systems and Networks Workshop (DSN-W), Toulouse, France, 28 June–1 July 2016; pp. 222–225. [Google Scholar]
- Shoufan, A. Continuous authentication of UAV flight command data using behaviometrics. In Proceedings of the 2017 IFIP/IEEE International Conference on Very Large Scale Integration (VLSI-SoC), Abu Dhabi, United Arab Emirates, 23–25 October 2017; pp. 1–6. [Google Scholar]
- Raytheon, Phaser High-Power Microwave System. Available online: https://www.raytheonmissilesanddefense.com/capabilities/products/phaser-high-power-microwave (accessed on 4 June 2021).
- Boeing, Laser-Focused Battlefield Defense. Available online: https://www.boeing.com/defense/missile-defense/directed-energy/index.page (accessed on 4 June 2021).
- CDET, RAM UAV Combat Unmanned Aerial System. Available online: https://ramuav.com/ (accessed on 4 June 2021).
- Drone Defence, NetGun X1—Short Range Drone Protection. Available online: https://www.dronedefence.co.uk/netgun-x1/ (accessed on 4 June 2021).
- Delft Dynamics, Dronecatcher. Available online: https://dronecatcher.nl/ (accessed on 4 June 2021).
- Lee, C.U.; Noh, G.; Ahn, B.; Yu, J.; Lee, H.L. Tilted-Beam Switched Array Antenna for UAV Mounted Radar Applications with 360° Coverage. Electronics 2019, 8, 1240. [Google Scholar] [CrossRef] [Green Version]
- Papaioannou, S.; Kolios, P.; Panayiotou, C.G.; Polycarpou, M.M. Cooperative Simultaneous Tracking and Jamming for Disabling a Rogue Drone. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021. [Google Scholar]
- Ghallab, M.; Nau, D.; Traverso, P. Automated Planning—Theory and Practice; Morgan Kaufmann Publishers: San Francisco, CA, USA, 2004. [Google Scholar]
- National Institute of Standards and Technology. Autonomy Levels for Unmanned Systems (ALFUS) Framework; NIST Special Publication 1011-I-2.0; Terminology Version 2.0; NIST: Gaithersburg, MD, USA, 2008; Volume I.
- Kolitz, S.E.; Beaton, R.M. Overall System Concepts in Mission Planning. In New Advances in Mission Planning and Rehearsal Systems; AGARD Lecture Series; AGARD: Neuilly Sur Seine, France, 1993; Volume 192. [Google Scholar]
- Wooldridge, M.J. An Introduction to MultiAgent Systems, 2nd ed.; John Wiley & Sons Ltd.: Chichester, UK, 2009. [Google Scholar]
- Jennings, N.R. Coordination Techniques for Distributed Artificial Intelligence. In Foundations of Distributed Artificial Intelligence; O’Hare, G.M.P., Jennings, N.R., Eds.; John Wiley & Sons Ltd.: New York, NY, USA, 2000; pp. 187–210. [Google Scholar]
- Nigam, N. The multiple unmanned air vehicle persistent surveillance problem: A review. Machines 2014, 2, 13–72. [Google Scholar] [CrossRef] [Green Version]
- Noor, F.; Khan, M.A.; Al-Zahrani, A.; Ullah, I.; Al-Dhlan, K.A. A Review on Communications Perspective of Flying Ad-Hoc Networks: Key Enabling Wireless Technologies, Applications, Challenges and Open Research Topics. Drones 2020, 4, 65. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Lorenz, P.; Tareque, H.; Hossain, S. Routing in Flying Ad Hoc Networks: Survey, Constraints, and Future Challenge Perspectives. IEEE Access 2017, 7, 81057–81105. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Category | Weight (in kg) | Normal Operating Altitude (in m) | Mission Radius, Range (in km) | Typical Endurance (in h) | Payload (in kg) | Available UAV Models in Market |
|---|---|---|---|---|---|---|
| Micro | <2 | <140 | 5 | <1 | <1 | DJI Spark, DJI Mavic, Parrot Bebop2 |
| Mini | 2–25 | <1000 | 25 | 2–8 | <10 | DJI Matrice600, DJI Inspire2, Airborne Vanguard |
| Small | 25–150 | <1700 | 50 | 4–12 | <50 | AAI Shadow 200, Scorpion 3 Hoverbike |
| Sensing Technique | Pros | Cons |
|---|---|---|
| Acoustic | Possibility to move close to the target and improve the identification task. | Need for proper ego-noise cancellation due to the propellers noise. |
| Optical | Possibility to change the perspective and to operate close to the target with a higher resolution and better identification capabilities. | Limited computational power; need for efficient video stabilization. |
| RF | Better conditions of the air-to-air channel with respect to the ground-to-air one. | |
| LiDAR | Possibility to move close to the target and improve the detection phase. | Limited on-board power. |
| Radar | Thanks to the proximal sensing, less power of the active sensor is required. | Limited on-board power. |
| Sensing Technique | Detection Range | Classification Capability | Global Feature Characterization |
|---|---|---|---|
| RF Scanner | Higher than 150 m | High | Low |
| RF RSS | Higher than 150 m | Low | Low |
| Acoustic | Higher than 150 m | Medium | Low |
| Lidar | Between 50 m and 150 m | Low | Low |
| Radar | Higher than 150 m | Medium | Medium |
| VIS | Higher than 150 m | High | High |
| IR | Lower than 150 m | Low | Low |
| Sensing Technique | Localization | Multi-Tracking | Meteorological Conditions | Environmental Conditions |
|---|---|---|---|---|
| RF Scanner | DoA | Possible | - | RF Spectrum congestion |
| RF RSS | DoA | Possible | - | RF Spectrum congestion |
| Acoustic | DoA | Yes | Wind | Noise |
| Lidar | DoA/Range | Possible | Fog, rain | Direct Light |
| Radar | DoA/Range/Speed | Yes | - | - |
| Optical VIS | DoA | Yes | Fog, rain | Night |
| Optical IR | DoA | Yes | Fog, rain | Background temperature |
| Task | Main | Complementary |
|---|---|---|
| Detection | Radar, Acoustic, RF | Optical |
| Classification | Optical, RF, Acoustic | Radar |
| Global Feature | Optical, Radar | Lidar |
| Localization | Radar, Lidar | RF, Acoustic |
| Tracking | Radar, Optical, Acoustic | Lidar, RF |
| Neutralizers | Features | Limitations | Pros and Cons with Drones |
|---|---|---|---|
| RF Jamming |
|
|
|
| GNSS Jamming |
|
|
|
| Spoofing |
|
|
|
| Protocol-Based and Replay Attacks |
|
|
|
| High-Power Electromagnetics |
|
|
|
| Projectiles |
|
|
|
| Collision UAVs |
|
|
|
| Nets |
|
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castrillo, V.U.; Manco, A.; Pascarella, D.; Gigante, G. A Review of Counter-UAS Technologies for Cooperative Defensive Teams of Drones. Drones 2022, 6, 65. https://doi.org/10.3390/drones6030065
Castrillo VU, Manco A, Pascarella D, Gigante G. A Review of Counter-UAS Technologies for Cooperative Defensive Teams of Drones. Drones. 2022; 6(3):65. https://doi.org/10.3390/drones6030065
Chicago/Turabian StyleCastrillo, Vittorio Ugo, Angelo Manco, Domenico Pascarella, and Gabriella Gigante. 2022. "A Review of Counter-UAS Technologies for Cooperative Defensive Teams of Drones" Drones 6, no. 3: 65. https://doi.org/10.3390/drones6030065
APA StyleCastrillo, V. U., Manco, A., Pascarella, D., & Gigante, G. (2022). A Review of Counter-UAS Technologies for Cooperative Defensive Teams of Drones. Drones, 6(3), 65. https://doi.org/10.3390/drones6030065