
Non-Terrestrial Networks with UAVs: A Projection on Flying Ad-Hoc Networks




Abstract
1. Introduction
1.1. Why NTN?
1.2. The Path from Satellites to UAVs
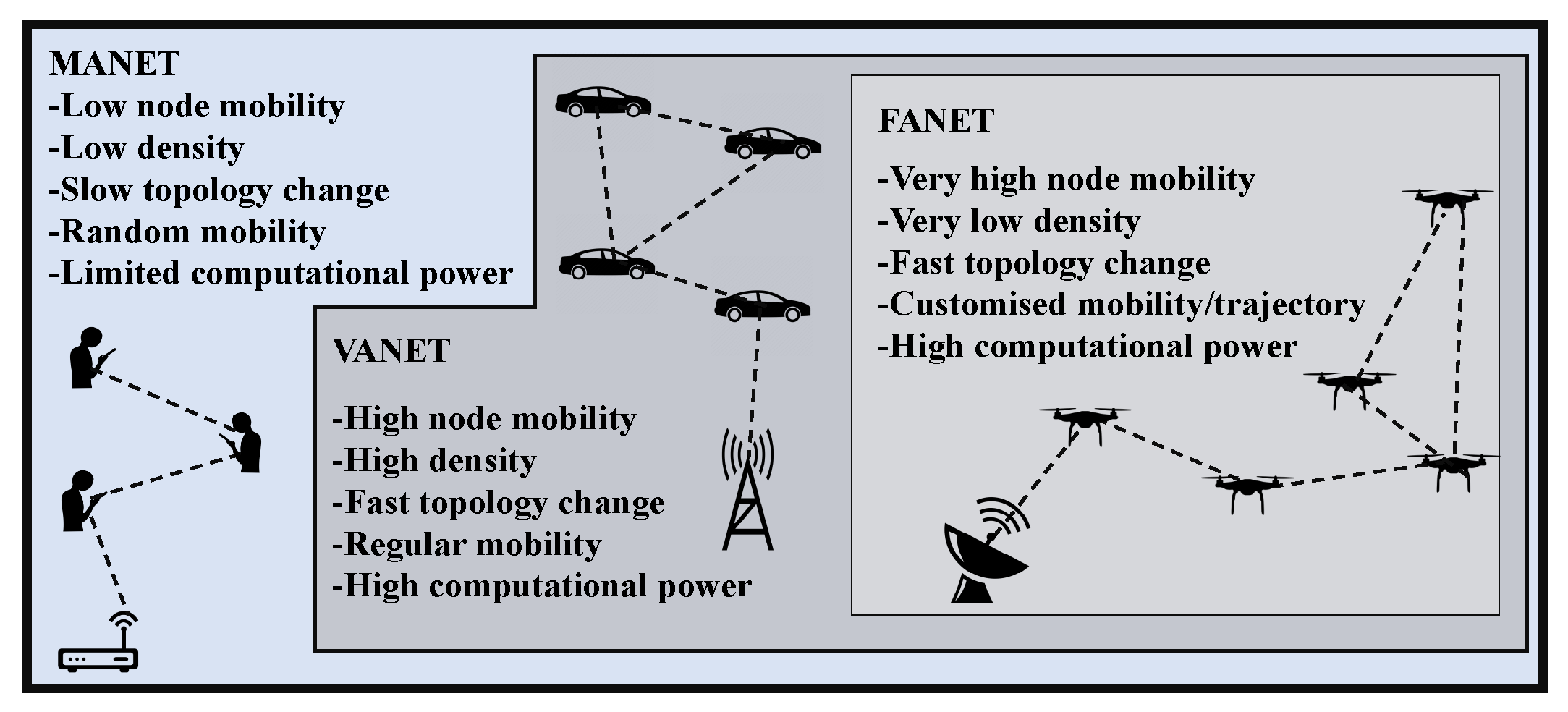
1.3. Background of FANET
1.4. Scope and Contributions
- This paper presents detailed NTN with UAVs, i.e., FANET, including features, existing and emerging applications, and its constraints. It sheds light on the distinctions that exist between the NTN components and gives a comprehensive survey of 218 FANET-related papers.
- The holistic overview of most recent advancements in relation to the emerging FANET technology is provided in terms of communication standards, physical layer, UAV role management, trajectory optimization, and routing protocols.
- DTN-routing protocols are taken into specific consideration for FANET due to its nature of intermittent connectivity and a DTN-assisted FANET framework is described and evaluated.
- The applications of AI/ML/DL techniques in FANET are thoroughly discussed.
- Finally, we take into account FANET’s potential and investigate its unique characteristics and advantages over existing approaches for dealing with challenging FANET problems. We use this knowledge to foresee the paths future research will go and the obstacles that will need to be overcome to enable FANET in wireless networks.
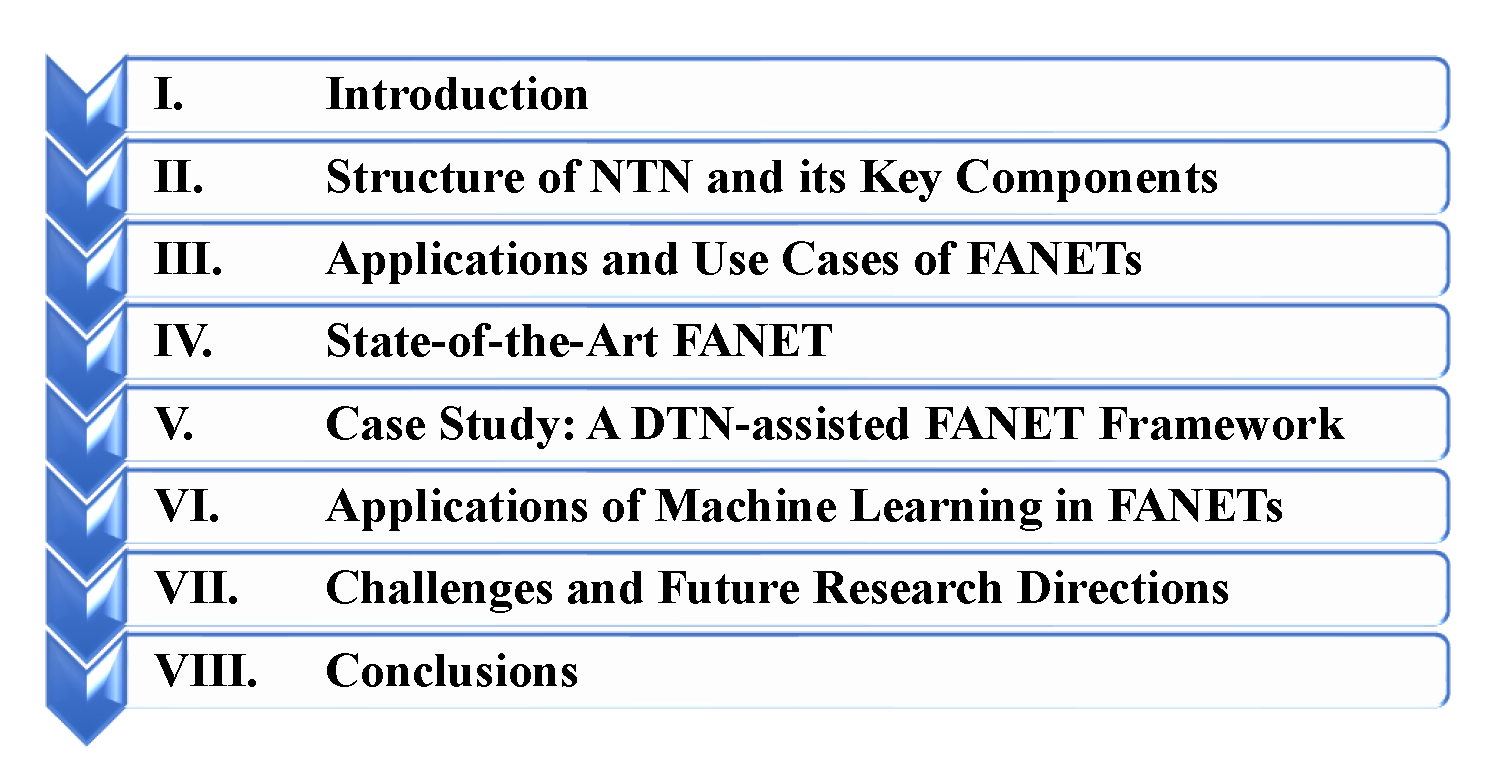
1.5. Organization
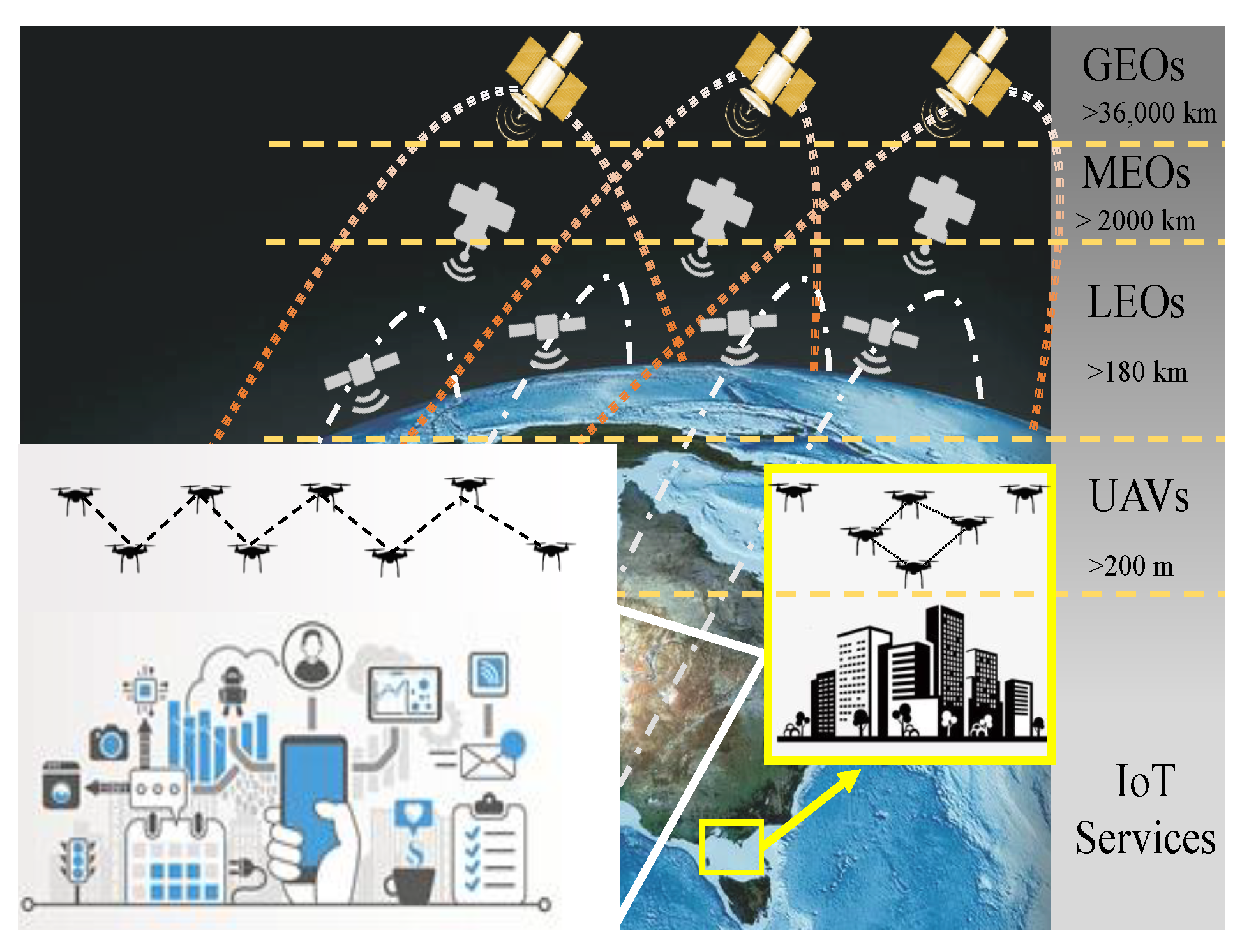
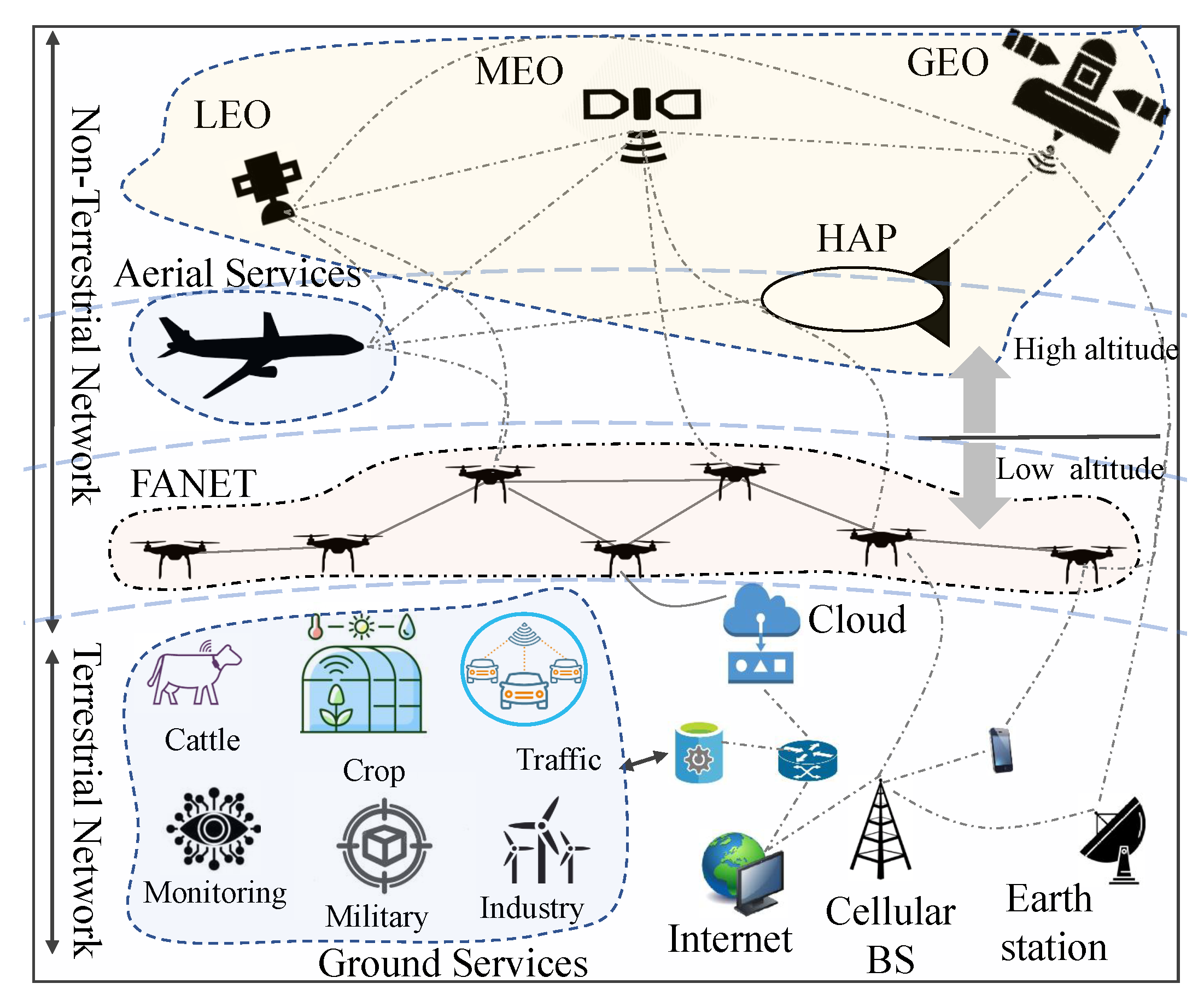
2. Structure of NTN and its Key Components
- GEO Satellites: GEO satellites are launched to orbit at an angular speed that is equivalent to that of Earth. Moreover, they are assigned to orbit along a route parallel to Earth’s rotation (also referred to as geostationary or stabilized satellites because they appear stationary to the user on the ground), thus mostly delivering coverage to a defined and fixed area [49]. Deploying GEOs is typically very expensive mainly due to their launching costs. This is because they are allocated to orbit at altitudes higher than 35,000 km [50] (common altitude: 35,786 km). GEO satellites are mainly used for TV broadcasts and in some cases to relay communications between spacecrafts, including the space shuttle, the Hubble space telescope, and Earth-based control centers.
- MEO Satellites: MEOs, also referred to as intermediate circular orbit (ICO), are satellites that orbit Earth between altitudes of 2000 km and 35,780 km (common altitude: 20,000 km). MEOs orbit Earth at faster angular speeds than GEO satellites due to their proximity to Earth. Indeed, as satellites are closer to Earth, the gravitational attraction becomes greater, and the satellites move faster [51]. Usually, it takes 2 to 24 h for one MEO satellite to complete a full orbit around Earth. They are mostly used for navigation systems, such as global positioning systems (GPS) [52].
- LEO Satellites: LEO satellites are designed to orbit Earth at much lower altitudes, usually between 200 km and 2000 km. This enables LEO satellites to provide satellite services at relatively low delays, but at the expense of deploying more satellites [53]. However, since they are closer to Earth, they orbit much faster, i.e., (>25,000 km/h, and their orbit period varies over a range of 40–120 min. This means that each LEO experiences at least 12 and up to 36 morning and night periods in only 24 h [54]. Hence, a constellation of LEO satellites is proposed to compensate for and offer continuous, worldwide coverage for high-speed broadband communication as well as imaging and communication backhaul [53,55].
- HAPs: Contrary to satellites and at lower altitudes of 17 to 50 km (stratospheric layer), HAPs (Additionally, known as high altitude aeronautical platforms (HAAPs))can be used to provide broadband communication services as well as broadcasting services by either unmanned airships, e.g., balloons, or airplanes [56]. HAP-based communication is suitable for large geographical areas where HAPs can move more freely and flexibly compared to satellites [57]. They are mainly powered by solar technology and non-polluting fuel cells.
- UAVs: The use of UAVs is anticipated to be essential in 6G and beyond, thanks to their widespread and rising use in a variety of applications [58]. UAVs have a substantial advantage over other NTN components because of the free and flexible mobility of drones and their remarkable adaptability. In addition, they have several applications, including expanding cellular coverage, agriculture, civil, military, industry, search and rescue, and fire monitoring, among others [19].
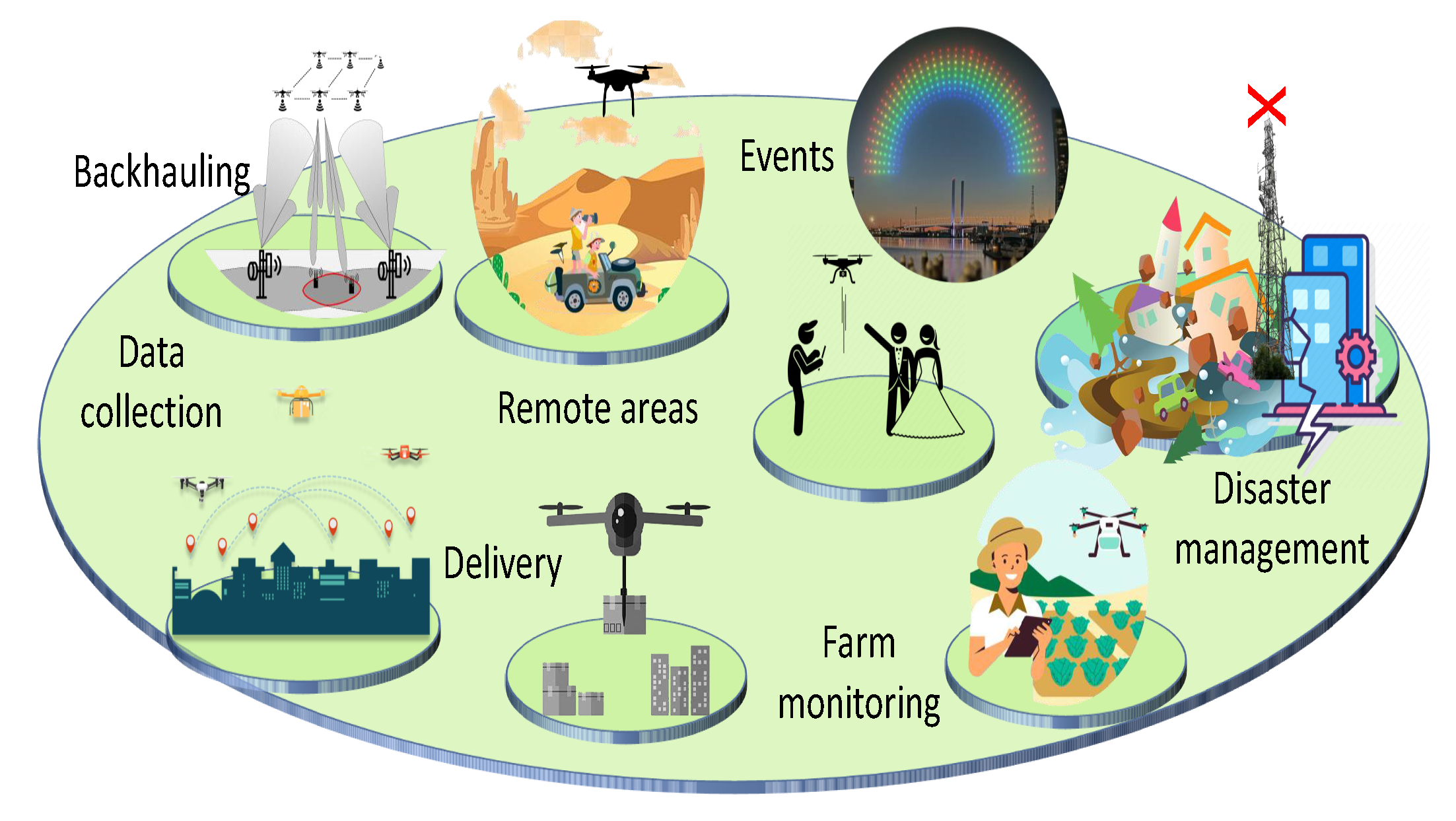
3. Applications and Use Cases of FANETs
3.1. Smart Farming
3.2. Emergency Situations
3.3. FANETs for Events
3.4. Cooperative Actions and UAV Air Traffic Management
4. State-of-the-Art FANET
4.1. Standards for FANETs
4.2. Physical Layer Advancements in FANETs
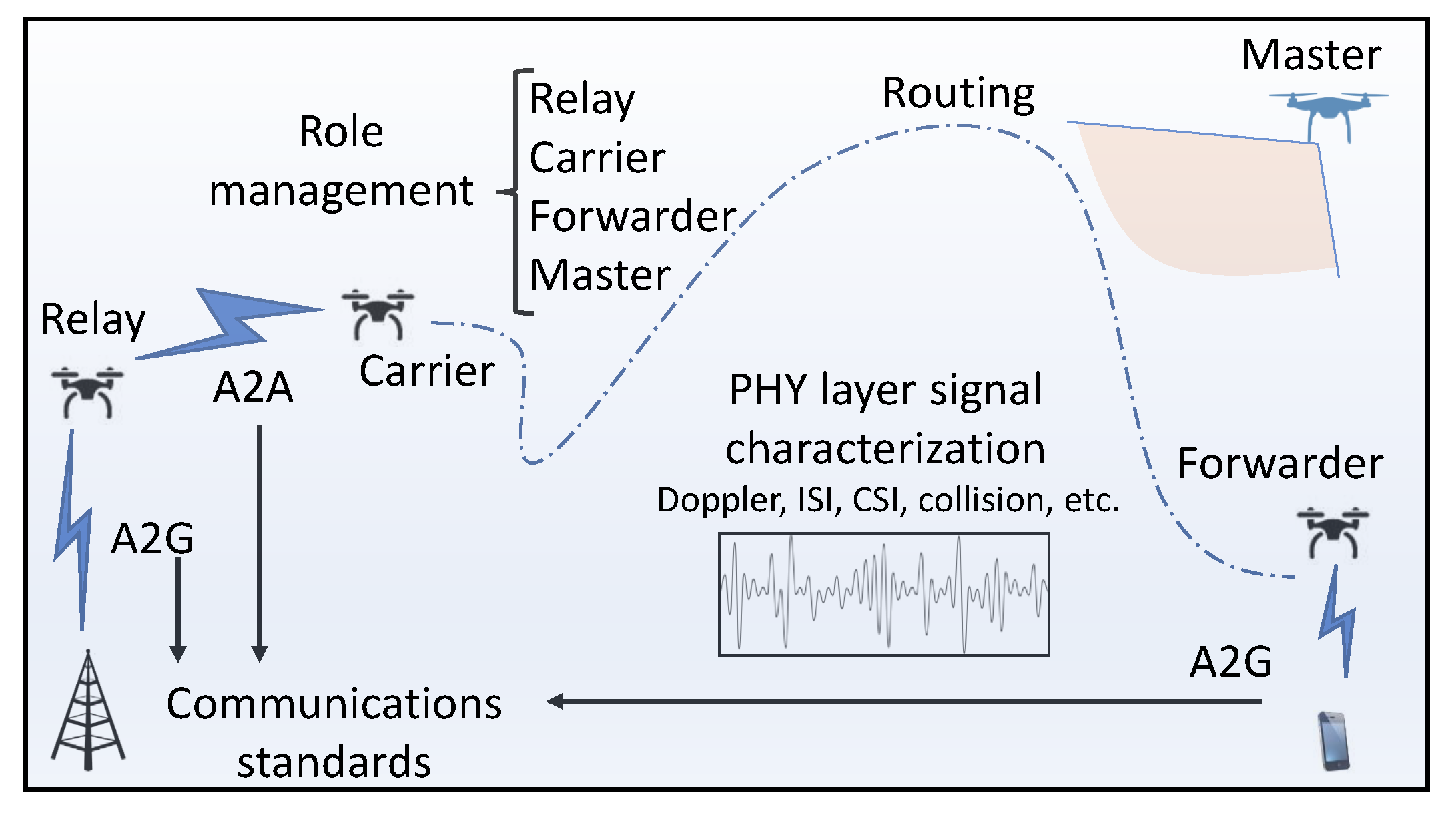
4.3. Role-Based Connectivity and Trajectory Management
- (1)
- a series of ground base-stations to command and control the UAVs,
- (2)
- some of the UAVs work as master UAVs and control others, or
- (3)
- each UAV learns how to deal with the network variations by using edge technologies such as AI and ML tools.
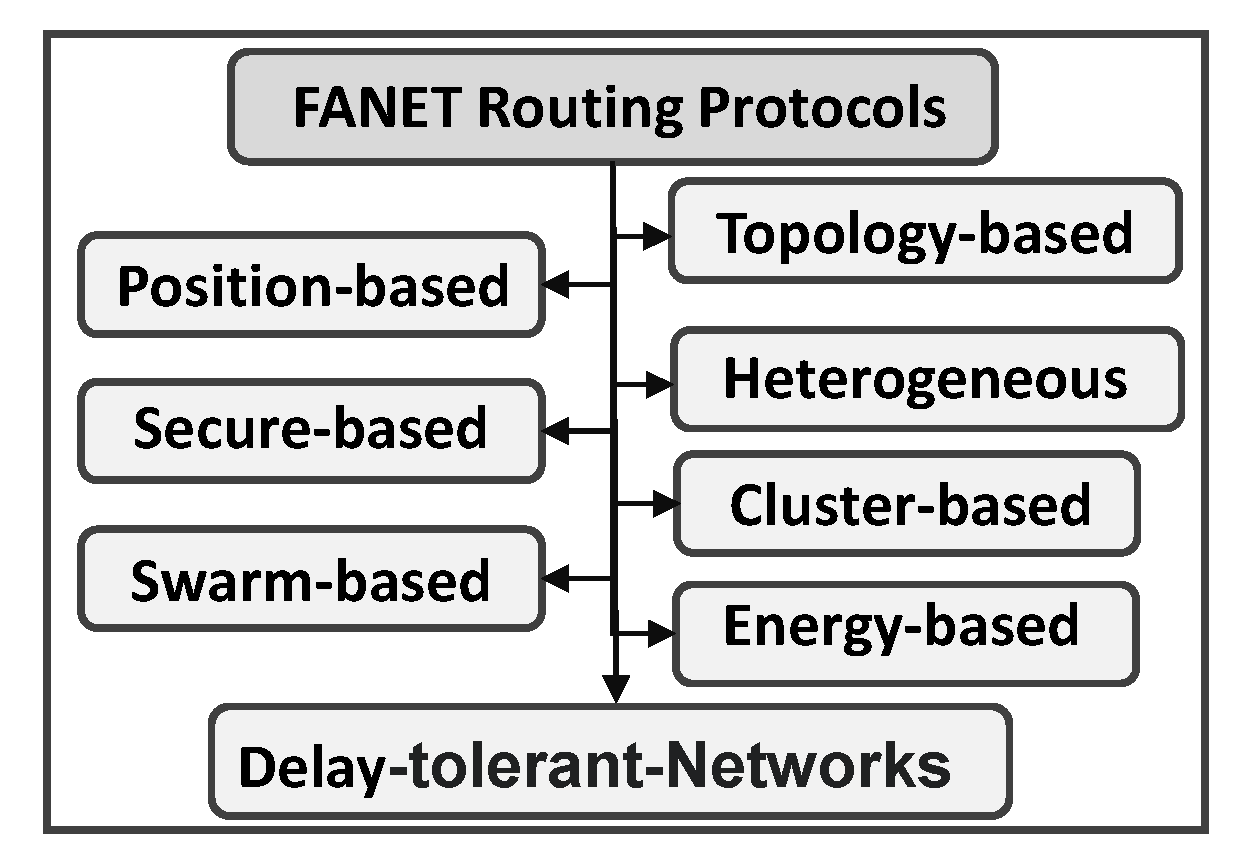
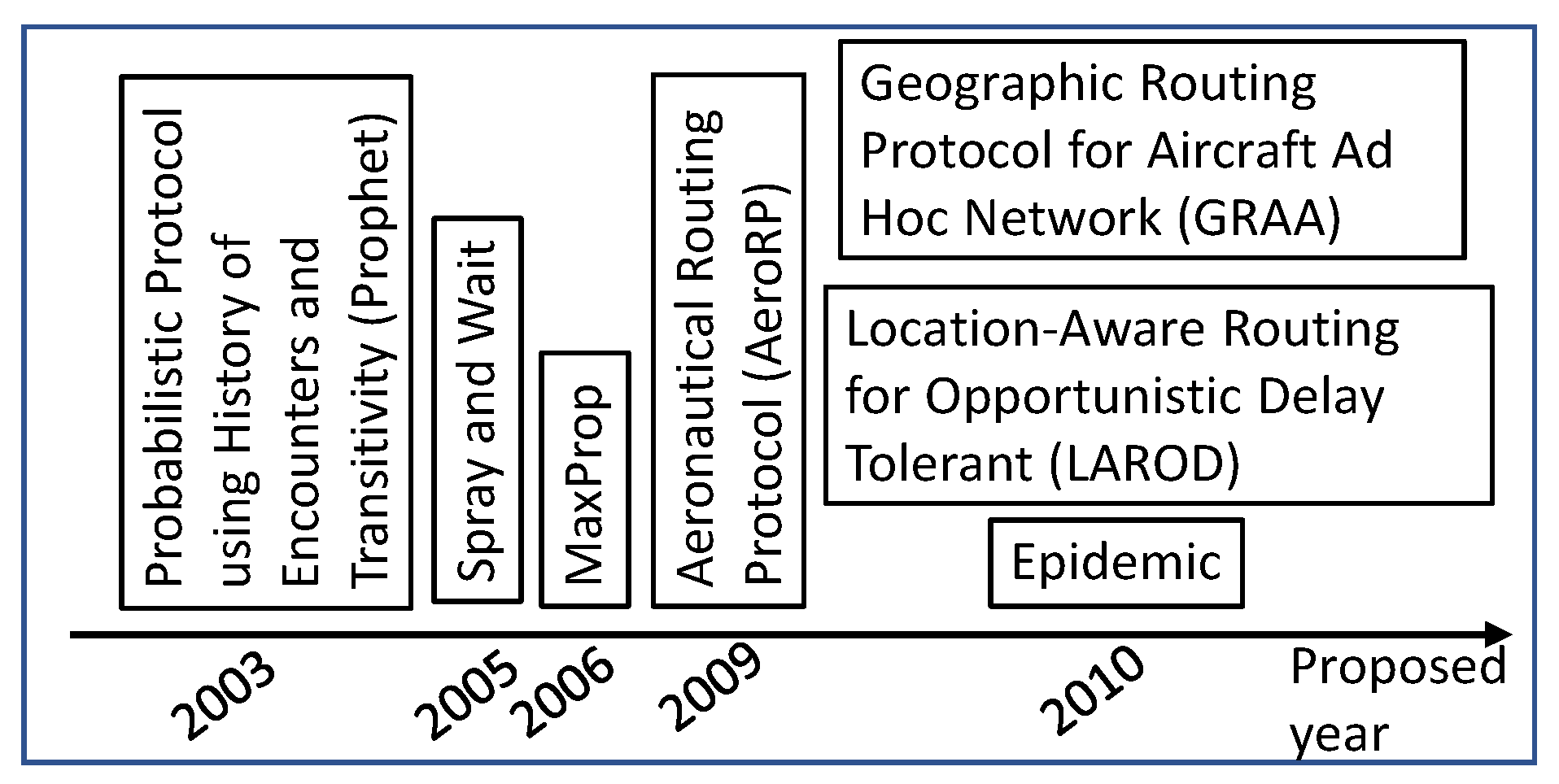
4.4. Routing Protocols in FANETs
5. Case Study: A DTN-assisted FANET Framework
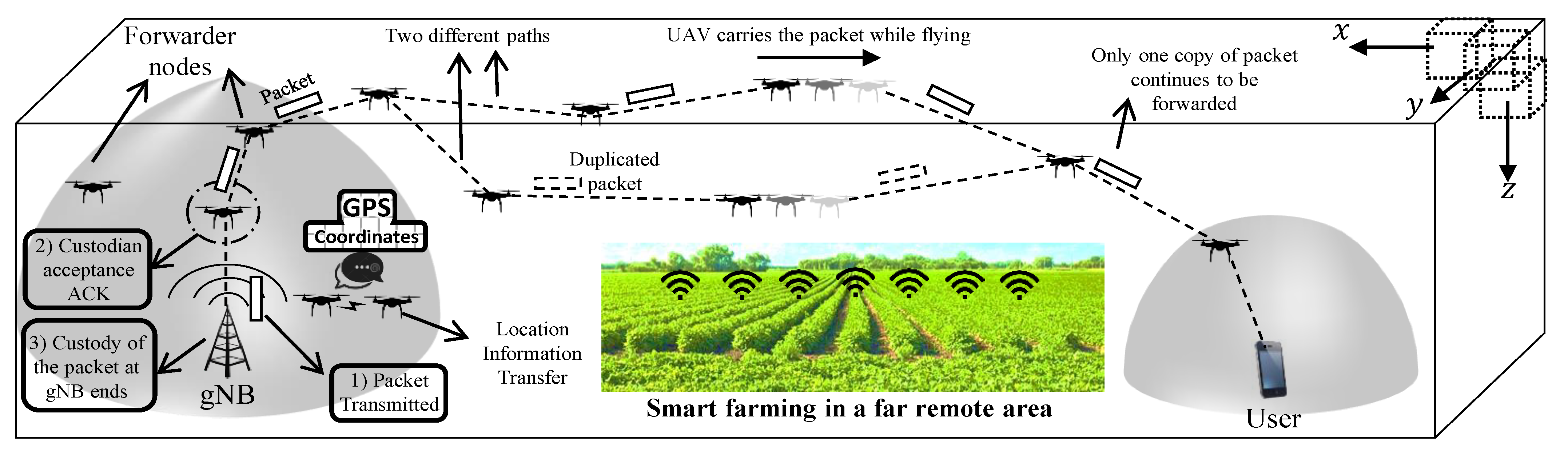
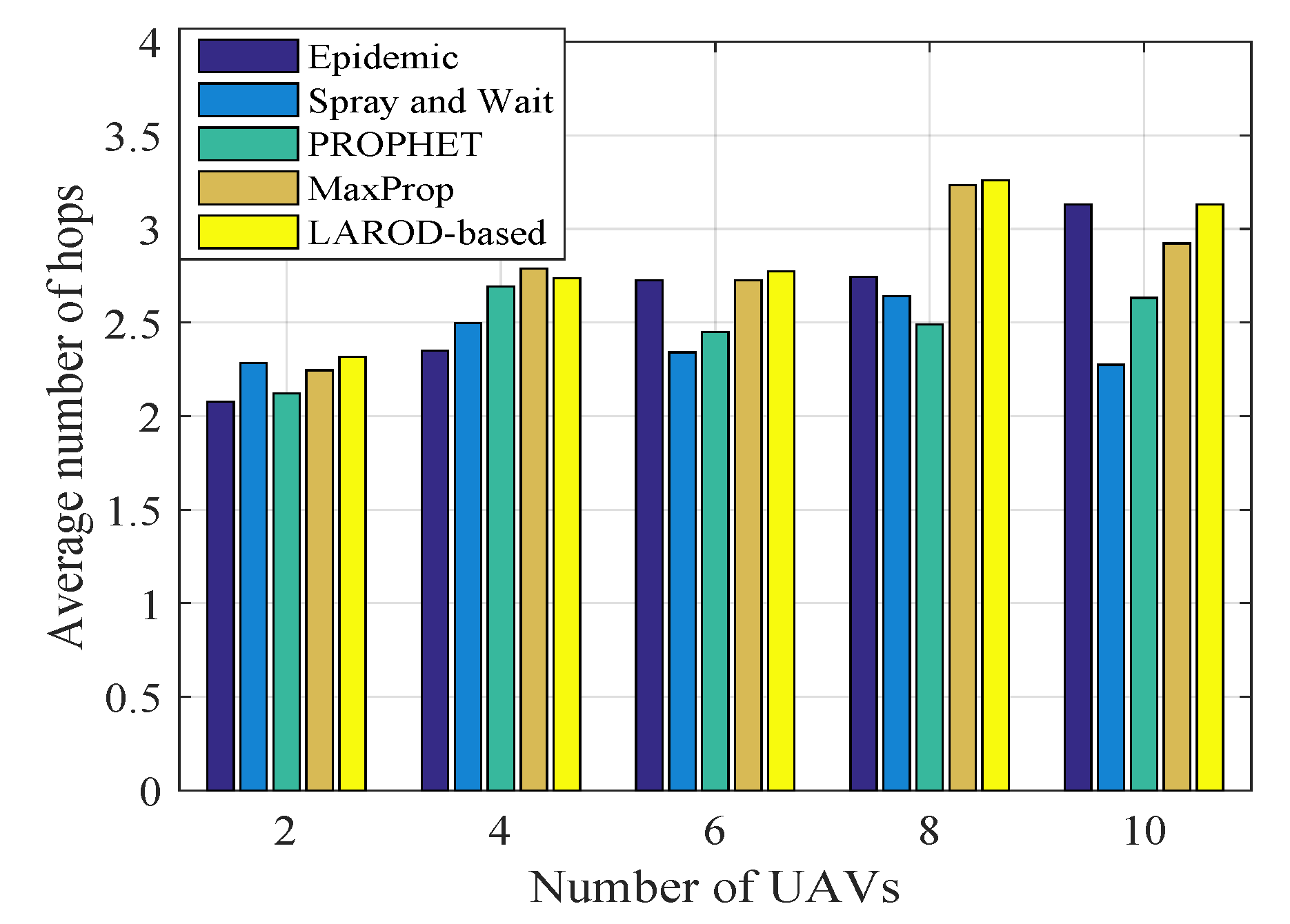
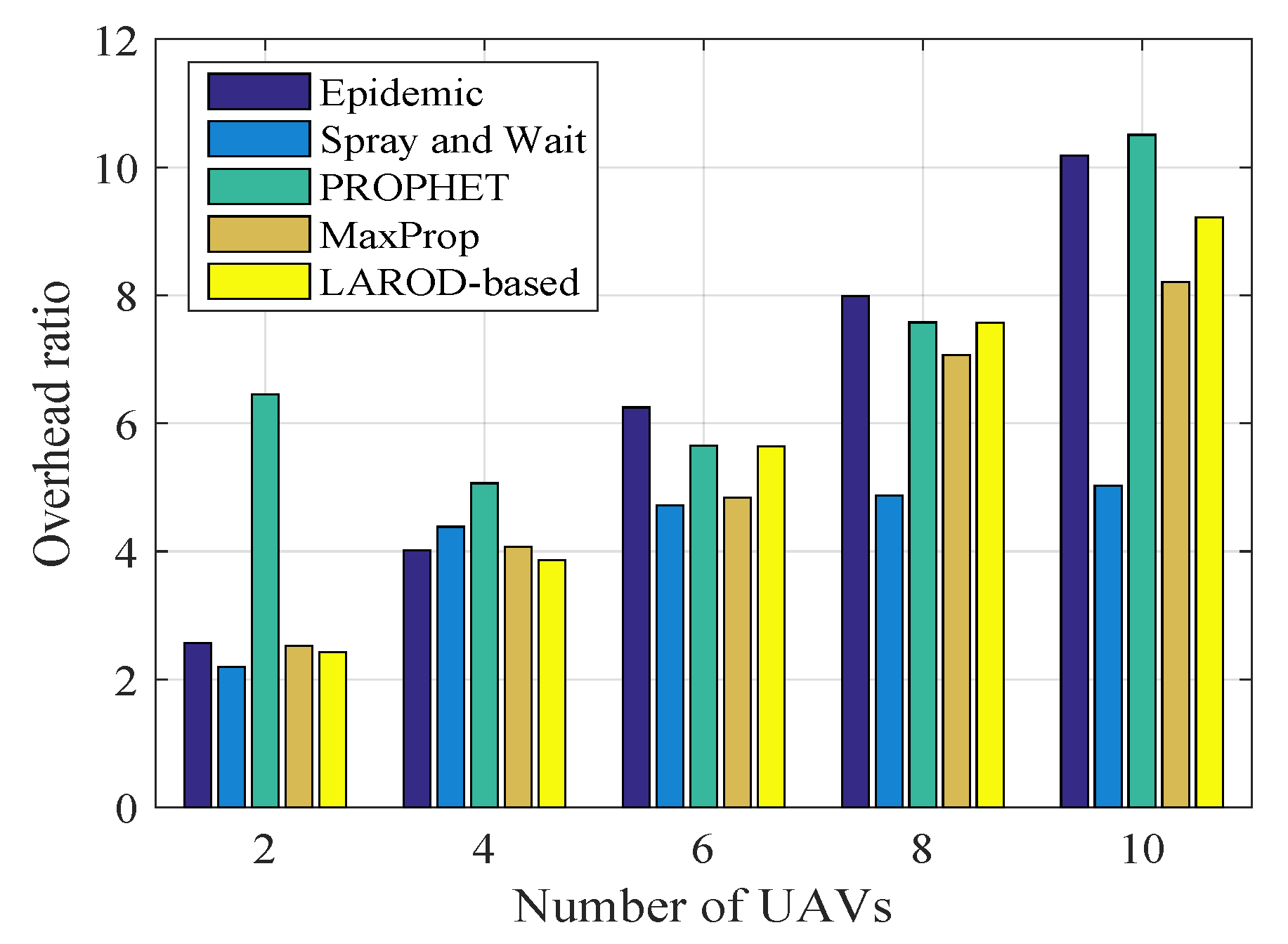
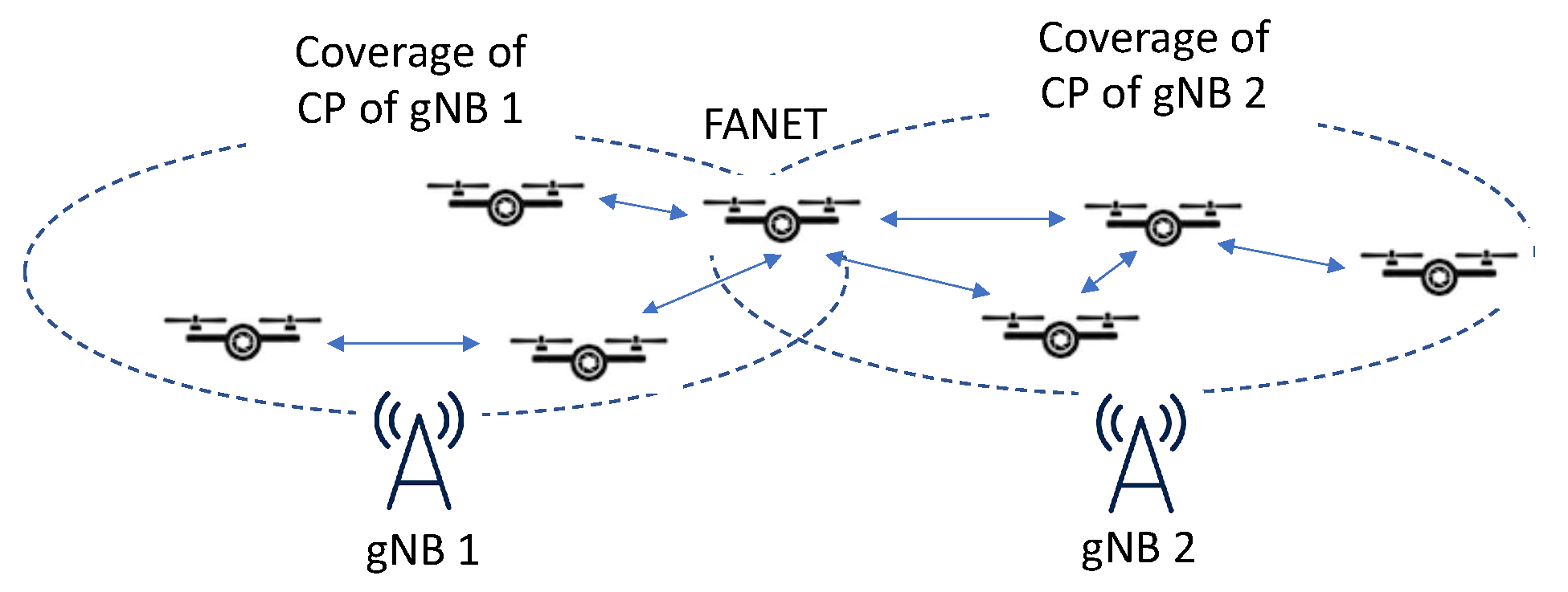
- Suppose a downlink scenario, shown in Figure 9, with N nodes where a source node, e.g., a gNB, broadcasts a packet to other neighbor forwarder nodes, e.g., UAVs, in its coverage range. The objective is that the best UAV gets selected as the best forwarder based on its location and re-broadcasts the packet to other forwarder nodes in the next hops, i.e., UAVs. This process is to continue till the packet travels the hops and reaches the destination node, i.e., the user.For the purpose of best forwarder selection in each hop, a proactive flooding-based location service (FLS) is required to enable each UAV to continuously disseminate a current map of the network’s neighborhood. For this purpose, each UAV has a GPS module and an inertial measurement unit (IMU) (The IMU calibration using GPS signal enables quicker delivery of UAV position coordinates) to exchange location information with other UAVs at rendezvous points. A portion of the buffer in each UAV is also dedicated to the location information of the whole network. Then, when two UAVs get together, they share their network’s coordinates, and the most recent information will be kept while the older one will be discarded. This happens proactively to have a kind of socially aware network. The issue with this system-wide dissemination of location information seems to be the use of a lot of system resources. However, the realistic number of UAVs in current FANET applications hardly exceeds 20–30 UAVs; because each UAV has a good ASE and flying range compared to ground nodes, making this number of UAVs enough to cover a wide area of ground users. Therefore, the buffersize for the coordinates of this limited number of UAVs is legitimate. On the other hand, because of the intermittent connectivity between the UAVs, the location data of nearby UAVs is more up-to-date while that of UAVs further away might be outdated. However, [123] proved that even the outdated location data of far UAVs can be used for the routing of packets as the precision of the location information improves as the data packet proceeds towards the destination node.
- At stage two, the best forwarder should be selected. Let us assume the broadcasting node is the current custodian and the next forwarder will be the next custodian. Hence, all UAVs that received the packet from the current custodian are tentative custodians. Based on the Bundle protocol, RFC5050 [130], in DTN systems (Bundle protocol is a custody-based retransmission DTN protocol created for shaky and intermittent networks. To communicate, it bundles together blocks of data and sends them all at once, using the SCF method), the tentative custodians activate their delay timers on the arrival of the packet, and if each custodian’s timer runs out first, it becomes the next custodian, i.e., the best forwarder. Once its timer delay runs out, it stores the packet in its buffer and broadcasts a custody acceptance acknowledgment (ACK). Then, the current and other tentative custodians that hear this ACK discard the packet.In this modeling, there would be two scenarios of hidden terminal problems: (1) if the current custodian does not hear the ACK it repeats the transmission after a fixed period of time, and (2) if any of the tentative nodes does not hear the ACK, it sends its own ACK and becomes a parallel custodian for that packet. As a result of both of these scenarios, there will be a chance of duplicated packet transmission through multipath directions. It is also possible that the duplicated packet from two separate paths reaches a single custodian and, from there, only one copy of it continues to be forwarded. The duplication of a packet increases the load on the network, so to end this, there is a time-to-live (TTL) period for each packet. After this period, the packet would be discarded by its custodian.
- Steps one and two continue between the UAVs hop-by-hop till the packet reaches the destination node at the application layer. The destination node then broadcasts an ACK indicating the packet has reached the destination. The UAVs that receive the ACK store it in their buffer and exchange it with other UAVs carrying the packet till the packet TTL runs out. As a result, all other custodians carrying the packet are notified of the delivery and discard the packet from their buffer.

6. Applications of Machine Learning in FANET
6.1. Routing
6.2. Resource Allocation
6.3. Network Security
7. Challenges and Future Research Directions
7.1. Infrastructure-Aided Control Plane
7.2. Mobility Management
7.3. Radio Resource Management
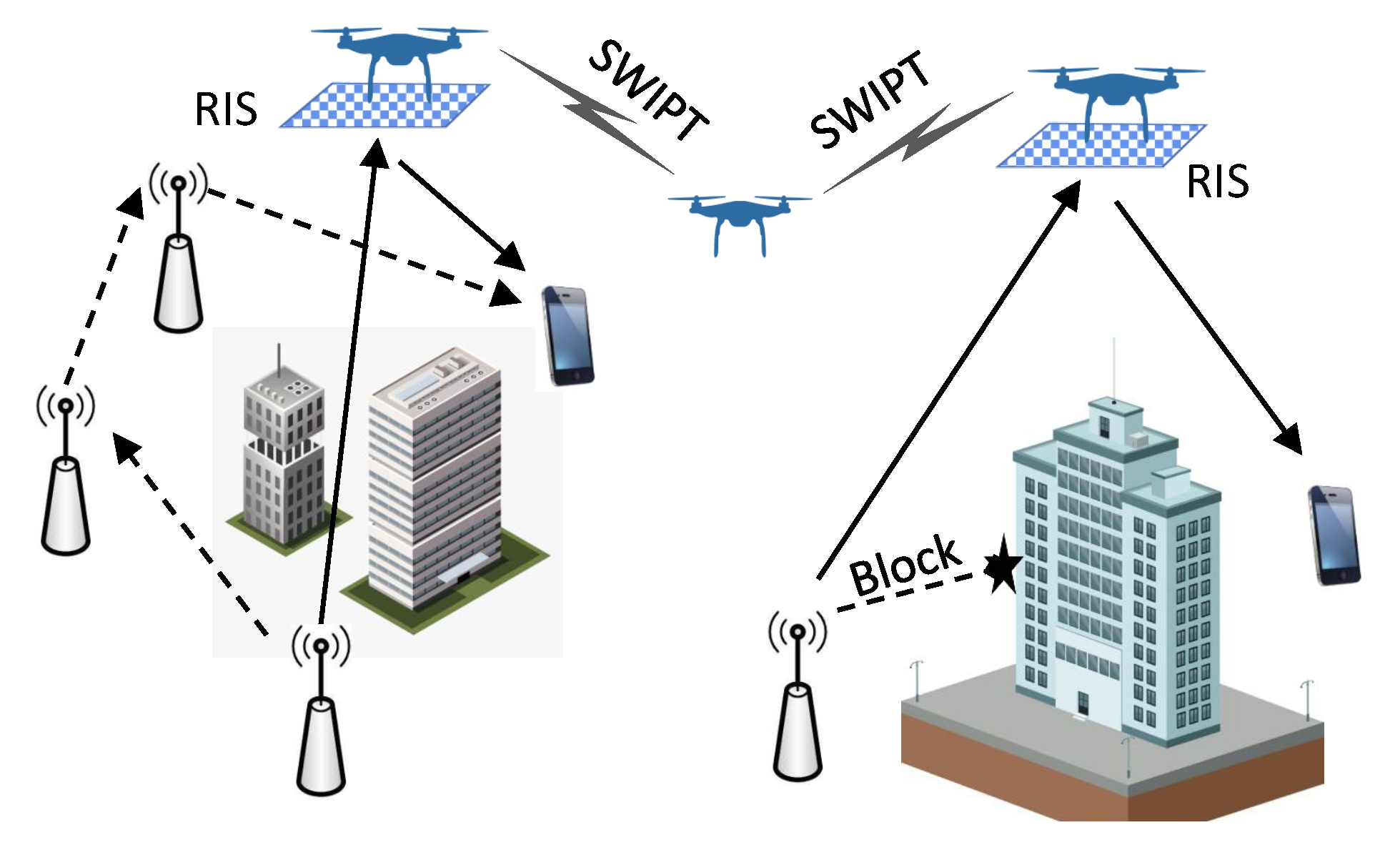
7.4. Reconfigurable Intelligent Surfaces
7.5. Advanced Antenna Technologies
7.6. Feedback Based Retransmissions
7.7. Time/Frequency/Space Dimensions
7.8. Network Coding
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 3GPP | 3rd Generation Partnership Project |
| A2A | Air-to-Air |
| A2G | Air-to-Ground |
| ACK | Acknowledgment |
| AI | Artificial Intelligence |
| ARQ | Automatic Repeat Request |
| CAGR | Compound Annual Growth Rate |
| CRC | Cyclic Redundancy Check |
| CSI | Channel State Information |
| DL | Deep Learning |
| DNN | Deep Neural Network |
| DQL | Deep Q-learning |
| DQN | Deep Q-Network |
| DTN | Delay Tolerant Network |
| eMBB | Enhanced Mobile Broadband |
| ESN | Echo State Networks |
| FANET | Flying Ad-hoc Network |
| FDD | Frequency Division Duplex |
| FL | Federated Learning |
| FLS | Flooding-based Location Service |
| G2A | Ground-to-Air |
| GEO | Geosynchronous/Geostationary Equatorial Orbit |
| gNB | Ground New Base Station |
| GPS | Global Positioning Systems |
| HAAP | High Altitude Aeronautical Platforms |
| HAP | High Altitude Platforms |
| HARQ | Hybrid Automatic Repeat Request |
| ICO | Intermediate Circular Orbit |
| IEEE | Institute of Electrical and Electronics Engineers |
| IMU | Inertial Measurement Unit |
| ISI | Inter-Symbol Interference |
| LEO | Low Earth Orbit |
| LTE | Long-Term Evolution |
| MANET | Mobile Ad-hoc Network |
| MEO | Medium Earth Orbit |
| ML | Machine Learning |
| mMTC | massive Machine Type Communications |
| mmWave | Millimeter-Wave |
| NOMA | Non-Orthogonal Multiple Access |
| NR | New Radio |
| RAN | Radio Access Network |
| RL | Reinforcement Learning |
| RTT | Round Trip Time |
| SCF | Store-Carry-and-Forward |
| SVM | Support Vector Machine |
| TDD | Time Division Duplex |
| TTL | Time To Live |
| UAS | Unmanned Aircraft Systems |
| URLLC | Ultra-Reliable and Low Latency Communications |
| UTM | UAS Traffic Management |
| VANET | Vehicular Ad-hoc Network |
Appendix A. Topology-Based Routing Protocols
- 1994
- Destination Sequence Distance Vector (DSDV) [175]
- 1996
- Dynamic Source Routing (DSR) [176]
- 1998
- Zone Routing Protocol (ZRP) [177]
- 1998
- Temporally Ordered Routing Algorithm (TORA) [178]
- 1999
- Ad hoc on Demand Vector (AODV) [179]
- 1999
- Hybrid Routing Protocol (HRP) [180]
- 2000
- Fisheye-State Routing (FSR) [181]
- 2000
- Multicast Ad hoc on Demand Vector (MAODV) [182]
- 2001
- Optimised Link State Routing (OLSR) [183]
- 2002
- Data-Centric Routing (DCR) [184]
- 2003
- Sharp Hybrid Adaptive Routing Protocol (SHARP) [185]
- 2004
- Topology Broadcast based on Reverse-Path Forwarding (TBRPF) [186]
- 2007
- Load, Carry and Delivery (LCAD) [131]
- 2007
- Time Slotted Ad hoc on Demand Vector (TS-AODV) (TS-AODV) [187]
- 2008
- Better Approach to Mobile Ad Hoc Network (BATMAN) [188]
- 2008
- Modified Optimised Link State Routing (MOLSR) [189]
- 2008
- Hybrid Routing based on Clustering (HRC) [190]
- 2010
- Directional Optimised Link State Routing (DOLSR) [191]
- 2011
- Cartography-Enhanced Optimised Link State Routing (CE-OLSR) [192]
- 2011
- Better Approach to Mobile Ad Hoc Network-Advanced (BATMAN-ADV) [193]
- 2011
- BABEL [194]
- 2012
- Contention Based Optimised Link State Routing (COLSR) [195]
- 2012
- Ad hoc on Demand Vector Security (AODVSEC) [196]
- 2012
- Mobility Prediction Clustering Algorithm (MPCA) [197]
- 2013
- Predictive Optimised Link State Routing (POLSR) [198]
- 2013
- Hybrid Wireless Mesh Protocol (HWMP) [199]
- 2013
- Rapid-reestablish Temporally Ordered Routing Algorithm (RTORA) [200]
- 2014
- Mobility and Load aware Optimised Link State Routing (ML-OLSR) [201]
- 2014
- Multi-Level Hierarchical Routing (MLHR) [20]
- 2017
- UAV-assisted routing (UVAR) [202].
Appendix B. Position-Based Routing Protocols
- 2006
- Ad Hoc Routing Protocol for Aeronautical Mobile Ad Hoc Networks (ARPAM) [203]
- 2008
- Greedy-Random-Greedy (GRG) [204]
- 2009
- Geographic Greedy Perimeter Stateless Routing (GPSR) [205]
- 2009
- UAV Search Mission Protocol (USMP) [205]
- 2009
- Greedy-Hull-Greedy (GHG) [206]
- 2010
- Multipath Doppler Routing (MUDOR) [207]
- 2010
- Greedy Distributed Spanning Tree Routing 3D (GDSTR-3D) [208]
- 2011
- Reactive-Greedy-Reactive (RGR) [209]
- 2011
- Greedy Geographic Forwarding (GGF) [210]
- 2011
- Geographic Load-Share Routing (GLSR) [211]
- 2012
- Geographic Position Mobility-Oriented Routing (GPMOR) [212]
- 2012
- Mobility Prediction-Based Geographic Routing (MPGR) [213]
- 2014
- Recovery Strategy for the Greedy Forwarding Failure (RSGFF) [214]
- 2014
- Cross-Layer Link Quality and Geographical-Aware Beaconless [215]
- 2015
- Connectivity-Based Traffic-Density Aware Routing Using UAVs for VANETs (CRUV) [118]
- 2016
- UAV-Assisted VANET Routing Protocol (UVAR) [216]
- 2016
- Position-Aware Secure and Efficient Routing Approach (PASER) [217]
- 2016
- Secure UAV Ad Hoc Routing Protocol (SUAP) [218].
References
- Yao, H.; Wang, L.; Wang, X.; Lu, Z.; Liu, Y. The Space-Terrestrial Integrated Network: An Overview. IEEE Commun. Mag. 2018, 56, 178–185. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, J.A.; Liu, R.P.; Guo, Y.J.; Hanzo, L. Airplane-Aided Integrated Networking for 6G Wireless: Will It Work? IEEE Veh. Technol. Mag. 2019, 14, 84–91. [Google Scholar] [CrossRef]
- Liu, J.; Peng, S.; Jiang, Z.; She, X.; Chen, P. Operation and Key Technologies in Space-Air-Ground Integrated Network. In Proceedings of the 2022 International Wireless Communications and Mobile Computing (IWCMC), Dubrovnik, Croatia, 30 May–3 June 2022; pp. 1311–1316. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Kak, A. The Internet of Space Things/CubeSats. IEEE Netw. 2019, 33, 212–218. [Google Scholar] [CrossRef]
- Priyadarshini, I.; Bhola, B.; Kumar, R.; So-In, C. A Novel Cloud Architecture for Internet of Space Things (IoST). IEEE Access 2022, 10, 15118–15134. [Google Scholar] [CrossRef]
- Kak, A.; Akyildiz, I.F. Designing Large-Scale Constellations for the Internet of Space Things With CubeSats. IEEE Internet Things J. 2021, 8, 1749–1768. [Google Scholar] [CrossRef]
- Tao, H.; Zhu, Q.; Che, X.; Li, X.; Man, W.; Zhang, Z.; Zhang, G. Impact of Mega Constellations on Geospace Safety. Aerospace 2022, 9, 402. [Google Scholar] [CrossRef]
- Zhu, Q.; Tao, H.; Cao, Y.; Li, X. Laser Inter-Satellite Link Visibility and Topology Optimization for Mega Constellation. Electronics 2022, 11, 2232. [Google Scholar] [CrossRef]
- Rajatheva, N.; Atzeni, I.; Bjornson, E.; Bourdoux, A.; Buzzi, S.; Dore, J.B.; Erkucuk, S.; Fuentes, M.; Guan, K.; Hu, Y.; et al. White paper on broadband connectivity in 6G. arXiv 2020, arXiv:2004.14247. [Google Scholar]
- Rinaldi, F.; Maattanen, H.L.; Torsner, J.; Pizzi, S.; Andreev, S.; Iera, A.; Koucheryavy, Y.; Araniti, G. Non-Terrestrial Networks in 5G & Beyond: A Survey. IEEE Access 2020, 8, 165178–165200. [Google Scholar] [CrossRef]
- González, T.N.; Salamanca, J.L.; Sánchez, S.M.; Meza, C.A.; Céspedes, S. Analysis of Channel Models for LoRa-based Direct-to-Satellite IoT Networks Served by LEO Nanosatellites. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Motzigemba, M.; Zech, H.; Biller, P. Optical inter satellite links for broadband networks. In Proceedings of the 2019 9th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkiye, 11–14 June 2019; pp. 509–512. [Google Scholar]
- Valiulahi, I.; Masouros, C. Multi-UAV deployment for throughput maximization in the presence of co-channel interference. IEEE Internet Things J. 2020, 8, 3605–3618. [Google Scholar] [CrossRef]
- Khan, M.A.; Safi, A.; Qureshi, I.M.; Khan, I.U. Flying ad hoc networks (FANETs): A review of communication architectures, and routing protocols. In Proceedings of the 2017 First International Conference on Latest trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 15–16 November 2017; pp. 1–9. [Google Scholar] [CrossRef]
- Zheng, Z.; Sangaiah, A.K.; Wang, T. Adaptive Communication Protocols in Flying Ad Hoc Network. IEEE Commun. Mag. 2018, 56, 136–142. [Google Scholar] [CrossRef]
- Swinney, C.J.; Woods, J.C. A Review of Security Incidents and Defence Techniques Relating to the Malicious Use of Small Unmanned Aerial Systems. IEEE Aerosp. Electron. Syst. Mag. 2022, 37, 14–28. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying ad hoc networks (FANETs): A survey. Ad. Hoc. Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Mukherjee, A.; Keshary, V.; Pandya, K.; Dey, N.; Satapathy, S.C. Flying ad hoc networks: A comprehensive survey. Inf. Decis. Sci. 2018, 702, 569–580. [Google Scholar]
- Guillen-Perez, A.; Montoya, A.M.; Sanchez-Aarnoutse, J.C.; Cano, M.D. A Comparative Performance Evaluation of Routing Protocols for Flying Ad-Hoc Networks in Real Conditions. Appl. Sci. 2021, 11, 4363. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Networking models in flying ad hoc networks (FANETs): Concepts and challenges. J. Intell. Robot. Syst. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Goddemeier, N.; Daniel, K.; Wietfeld, C. Role-based connectivity management with realistic air-to-ground channels for cooperative UAVs. IEEE J. Sel. Areas Commun. 2012, 30, 951–963. [Google Scholar] [CrossRef]
- Mukherjee, A.; Dey, N.; Kumar, R.; Panigrahi, B.K.; Hassanien, A.E.; Tavares, J.M.R. Delay Tolerant Network assisted flying Ad-Hoc network scenario: Modeling and analytical perspective. Wirel. Netw. 2019, 25, 2675–2695. [Google Scholar] [CrossRef]
- Srivastava, A.; Prakash, J. Future FANET with application and enabling techniques: Anatomization and sustainability issues. Comput. Sci. Rev. 2021, 39, 100359. [Google Scholar] [CrossRef]
- Chriki, A.; Touati, H.; Snoussi, H.; Kamoun, F. FANET: Communication, mobility models and security issues. Comput. Netw. 2019, 163, 106877. [Google Scholar] [CrossRef]
- Kumari, K.; Sah, B.; Maakar, S. A survey: Different mobility model for FANET. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2015, 5, 1170–1173. [Google Scholar]
- Bujari, A.; Palazzi, C.E.; Ronzani, D. FANET Application Scenarios and Mobility Models. In Proceedings of the 3rd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications; Association for Computing Machinery: New York, NY, USA, 2017; DroNet ’17; pp. 43–46. [Google Scholar] [CrossRef]
- Priyan, M.; Devi, G.U. Energy efficient node selection algorithm based on node performance index and random waypoint mobility model in internet of vehicles. Clust. Comput. 2018, 21, 213–227. [Google Scholar] [CrossRef]
- Deng, S.; Huang, L.; Taheri, J.; Yin, J.; Zhou, M.; Zomaya, A.Y. Mobility-aware service composition in mobile communities. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 555–568. [Google Scholar] [CrossRef]
- Purohit, A.; Mokaya, F.; Zhang, P. Demo abstract: Collaborative indoor sensing with the SensorFly aerial sensor network. In Proceedings of the 2012 ACM/IEEE 11th International Conference on Information Processing in Sensor Networks (IPSN), Beijing, China, 16–20 April 2012; pp. 145–146. [Google Scholar]
- Galluccio, L.; Grasso, C.; Maier, G.; Raftopoulos, R.; Savi, M.; Schembra, G.; Troia, S. Reinforcement Learning for Resource Planning in Drone-Based Softwarized Networks. In Proceedings of the 2022 20th Mediterranean Communication and Computer Networking Conference (MedComNet), Pafos, Cyprus, 1–3 June 2022; pp. 200–207. [Google Scholar]
- Bharany, S.; Sharma, S.; Bhatia, S.; Rahmani, M.K.I.; Shuaib, M.; Lashari, S.A. Energy Efficient Clustering Protocol for FANETS Using Moth Flame Optimization. Sustainability 2022, 14, 6159. [Google Scholar] [CrossRef]
- Zhao, Y.; Cai, Y.; Wu, W.; Wang, W. Explore Faster Localization Learning For Scene Text Detection. arXiv 2022, arXiv:2207.01342. [Google Scholar]
- Amponis, G.; Lagkas, T.; Zevgara, M.; Katsikas, G.; Xirofotos, T.; Moscholios, I.; Sarigiannidis, P. Drones in B5G/6G Networks as Flying Base Stations. Drones 2022, 6, 39. [Google Scholar] [CrossRef]
- Eckert, J.; Eckhoff, D.; German, R. A deterministic radio propagation model for inter-paraglider communication. In Proceedings of the 2014 11th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Obergurgl, Austria, 2–4 April 2014; pp. 138–142. [Google Scholar]
- Vasilyev, G.S.; Surzhik, D.I.; Kuzichkin, O.R.; Bondarik, K. Hierarchical model of information signals formation at the physical layer in FANET. In Proceedings of the 2020 7th International Conference on Control, Decision and Information Technologies (CoDIT), Prague, Czech Republic, 29 June–2 July 2020; Volume 1, pp. 1221–1225. [Google Scholar]
- Arafat, M.Y.; Moh, S. Routing protocols for unmanned aerial vehicle networks: A survey. IEEE Access 2019, 7, 99694–99720. [Google Scholar] [CrossRef]
- Shumeye Lakew, D.; Sa’ad, U.; Dao, N.N.; Na, W.; Cho, S. Routing in Flying Ad Hoc Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutorials 2020, 22, 1071–1120. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Lorenz, P.; Tareque, M.H.; Hossain, M.S. Routing in Flying Ad Hoc Networks: Survey, Constraints, and Future Challenge Perspectives. IEEE Access 2019, 7, 81057–81105. [Google Scholar] [CrossRef]
- Jiang, J.; Han, G. Routing protocols for unmanned aerial vehicles. IEEE Commun. Mag. 2018, 56, 58–63. [Google Scholar] [CrossRef]
- Kerrache, C.A.; Barka, E.; Lagraa, N.; Lakas, A. Reputation-aware energy-efficient solution for FANET monitoring. In Proceedings of the 2017 10th IFIP Wireless and Mobile Networking Conference (WMNC). IEEE, Piscataway, NJ, USA, 25–27 September 2017; pp. 1–6. [Google Scholar]
- De Vit, A.R.D.; Marcon, C.; Nunes, R.C.; Webber, T.; Sanchez, G.; Rolim, C.O. Energy saving on DTN using trajectory inference model. In Proceedings of the 33rd Annual ACM Symposium on Applied Computing, Pau, France, 9–13 April 2018; pp. 2132–2135. [Google Scholar]
- Amjad, K.; Stocker, A.J. Impact of node density and mobility on the performance of AODV and DSR in MANETS. In Proceedings of the 2010 7th International Symposium on Communication Systems, Networks & Digital Signal Processing (CSNDSP 2010), Porto, Portugal, 21–23 July 2010; pp. 61–65. [Google Scholar]
- Bashir, M.N.; Yusof, K.M. Green mesh network of UAVs: A survey of energy efficient protocols across physical, data link and network layers. In Proceedings of the 2019 4th MEC International Conference on Big Data and Smart City (ICBDSC), Muscat, Oman, 15–16 January 2019; pp. 1–6. [Google Scholar]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutorials 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Sharma, V.; Kumar, R. Cooperative frameworks and network models for flying ad hoc networks: A survey. Concurr. Comput. Pract. Exp. 2017, 29, e3931. [Google Scholar] [CrossRef]
- Abdulhae, O.T.; Mandeep, J.S.; Islam, M. Cluster-Based Routing Protocols for Flying Ad Hoc Networks (FANETs). IEEE Access 2022, 10, 32981–33004. [Google Scholar] [CrossRef]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, T.; Liu, T.; Zhang, Q.; Liu, Y. Deep Neural Network Routing with Dynamic Space Division for 3D1/2 UAV FANETs. Wirel. Pers. Commun. 2022, 125, 1–25. [Google Scholar]
- Cognion, R.L. Rotation Rates of Inactive Satellites Near Geosynchronous Earth Orbit; Oceanit: Honolulu, HI, USA, 2015. [Google Scholar]
- Oltrogge, D.; Alfano, S.; Law, C.; Cacioni, A.; Kelso, T. A comprehensive assessment of collision likelihood in Geosynchronous Earth Orbit. Acta Astronaut. 2018, 147, 316–345. [Google Scholar] [CrossRef]
- Riebeek, H. Catalog of Earth Satellite Orbits. 2009. Available online: https://earthobservatory.nasa.gov/features/OrbitsCatalog/page1.php (accessed on 20 June 2022).
- Goratti, L.; Herle, S.; Betz, T.; Temprado Garriga, E.; Khalili, H.; Khodashenas, P.S.; Brunel, A.P.; Chau, D.K.; Ravuri, S.; Vasudevamurthy, R.; et al. Satellite integration into 5G: Accent on testbed implementation and demonstration results for 5G Aero platform backhauling use case. Int. J. Satell. Commun. Netw. 2021, 39, 380–399. [Google Scholar] [CrossRef]
- Al Homssi, B.; Al-Hourani, A.; Wang, K.; Conder, P.; Kandeepan, S.; Choi, J.; Allen, B.; Moores, B. Next Generation Mega Satellite Networks for Access Equality: Opportunities, Challenges, and Performance. IEEE Commun. Mag. 2022, 60, 18–24. [Google Scholar] [CrossRef]
- Borthomieu, Y. Satellite Lithium-ion batteries. In Lithium-ion batteries; Elsevier: Amsterdam, The Netherlands, 2014; pp. 311–344. [Google Scholar]
- Liu, S.; Gao, Z.; Wu, Y.; Ng, D.W.K.; Gao, X.; Wong, K.K.; Chatzinotas, S.; Ottersten, B. LEO satellite constellations for 5G and beyond: How will they reshape vertical domains? IEEE Commun. Mag. 2021, 59, 30–36. [Google Scholar] [CrossRef]
- d’Oliveira, F.A.; Melo, F.C.L.d.; Devezas, T.C. High-altitude platforms—Present situation and technology trends. J. Aerosp. Technol. Manag. 2016, 8, 249–262. [Google Scholar] [CrossRef]
- Khan, M.A.; Qureshi, I.M.; Khanzada, F. A hybrid communication scheme for efficient and low-cost deployment of future flying ad hoc network (FANET). Drones 2019, 3, 16. [Google Scholar] [CrossRef]
- Mozaffari, M.; Lin, X.; Hayes, S. Toward 6G with connected sky: UAVs and beyond. IEEE Commun. Mag. 2021, 59, 74–80. [Google Scholar] [CrossRef]
- 978-1-68038-482-6, R.I. Commercial Drone Market Size, Share & Trends Analysis Report By Product (Fixed-wing, Rotary Blade, Hybrid), By Application, By End-use, By Region, Furthermore, Segment Forecasts, 2021–2028. 2019. Available online: http://www.grandviewresearch.com/industry-analysis/global-commercial-drones-market# (accessed on 27 June 2022).
- Emilien, A.V.; Thomas, C.; Thomas, H. UAV & satellite synergies for optical remote sensing applications: A literature review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar]
- 3GPP TR 22.822. Study on Using Satellite Access in 5G. 2018. Available online: http://www.3gpp.org/ftp//Specs/archive/22_series/22.822/22822-g00.zip (accessed on 28 June 2022).
- 3GPP TR 38.811. Study on New Radio to Support Non-Terrestrial Networks. 2018. Available online: http://www.3gpp.org/ftp//Specs/archive/38_series/38.811/38811-f00.zip (accessed on 28 June 2022).
- Ding, J.; Nemati, M.; Pokhrel, S.R.; Park, O.S.; Choi, J.; Adachi, F. Enabling grant-free URLLC: An overview of principle and enhancements by massive MIMO. IEEE Internet Things J. 2022, 9, 384–400. [Google Scholar] [CrossRef]
- Nemati, M.; Pokhrel, S.R.; Choi, J. Modelling data aided sensing with UAVs for efficient data collection. IEEE Wirel. Commun. Lett. 2021, 10, 1959–1963. [Google Scholar] [CrossRef]
- Han, R.; Bai, L.; Wen, Y.; Liu, J.; Choi, J.; Zhang, W. UAV-Aided Backscatter Communications: Performance Analysis and Trajectory Optimization. IEEE J. Sel. Areas Commun. 2021, 39, 3129–3143. [Google Scholar] [CrossRef]
- Nemati, M.; Takshi, H.; Shah-Mansouri, V. Tag estimation in RFID systems with capture effect. In Proceedings of the 2015 23rd Iranian Conference on Electrical Engineering, Tehran, Iran, 10–14 May 2015; pp. 368–373. [Google Scholar]
- Kakamoukas, G.A.; Sarigiannidis, P.G.; Economides, A.A. FANETs in Agriculture-A routing protocol survey. Internet Things 2022, 18, 100183. [Google Scholar] [CrossRef]
- Loke, S.W. The Internet of Flying-Things: Opportunities and Challenges with Airborne Fog Computing and Mobile Cloud in the Clouds. arXiv 2015, arXiv:1507.04492. [Google Scholar]
- Alwateer, M.; Loke, S.W. Emerging Drone Services: Challenges and Societal Issues. IEEE Technol. Soc. Mag. 2020, 39, 47–51. [Google Scholar] [CrossRef]
- Azari, M.M.; Solanki, S.; Chatzinotas, S.; Kodheli, O.; Sallouha, H.; Colpaert, A.; Montoya, J.F.M.; Pollin, S.; Haqiqatnejad, A.; Mostaani, A.; et al. Evolution of non-terrestrial networks from 5G to 6G: A survey. arXiv 2021, arXiv:2107.06881. [Google Scholar] [CrossRef]
- IEEE P1936.1/D7.0; IEEE Approved Draft Standard for Drone Applications Framework. IEEE: Piscataway, NJ, USA, 2021; pp. 1–32.
- IEEE P1939.1/D5.0; IEEE Draft Standard for a Framework for Structuring Low Altitude Airspace for Unmanned Aerial Vehicle (UAV) Operations. IEEE: Piscataway, NJ, USA, 2021; pp. 1–90.
- IEEE P1920.1/D4; IEEE Draft Standard for Aerial Communications and Networking Standards. IEEE: Piscataway, NJ, USA, 2020; pp. 1–85.
- Y.4421: Functional Architecture for Unmanned Aerial Vehicles and Unmanned Aerial Vehicle Controllers Using IMT-2020 Networks. itu-t y.uav.arch. 2021, pp. 1–24. Available online: https://www.itu.int/rec/T-REC-Y.4421/en (accessed on 30 June 2022).
- ITU-T F.749.10; F.749.10: Requirements for communication services of civilian unmanned aerial vehicles. ITU: Geneva, Switzerland, 2019; pp. 1–20.
- Zhang, S.; Zhang, H.; Song, L. Beyond D2D: Full Dimension UAV-to-Everything Communications in 6G. IEEE Trans. Veh. Technol. 2020, 69, 6592–6602. [Google Scholar] [CrossRef]
- Nemati, M.; Kim, Y.H.; Choi, J. Toward Joint Radar, Communication, Computation, Localization, and Sensing in IoT. IEEE Access 2022, 10, 11772–11788. [Google Scholar] [CrossRef]
- Kopardekar, P.H. Unmanned Aerial System (UAS) Traffic Management (UTM): Enabling Low-Altitude Airspace and UAS Operations; Technical Report; NASA, Ames Research Center: Moffett Field, CA, USA, 2014. [Google Scholar]
- Wang, J.; Jiang, C. Communication Channels in FANET. In Flying Ad Hoc Networks; Springer: Berlin/Heidelberg, Germany, 2022; pp. 11–40. [Google Scholar]
- Daniel, K.; Rohde, S.; Goddemeier, N.; Wietfeld, C. Cognitive agent mobility for aerial sensor networks. IEEE Sens. J. 2011, 11, 2671–2682. [Google Scholar] [CrossRef]
- Abdalla, A.S.; Marojevic, V. Communications Standards for Unmanned Aircraft Systems: The 3GPP Perspective and Research Drivers. IEEE Commun. Stand. Mag. 2021, 5, 70–77. [Google Scholar] [CrossRef]
- Ding, J.; Nemati, M.; Ranaweera, C.; Choi, J. IoT Connectivity Technologies and Applications: A Survey. IEEE Access 2020, 8, 67646–67673. [Google Scholar] [CrossRef]
- Nemati, M.; Arslan, H. Low ICI Symbol Boundary Alignment for 5G Numerology Design. IEEE Access 2018, 6, 2356–2366. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef]
- Fan, X.; Lin, J.; Zhang, C.; Zhang, S. A cross-layer anti-jamming routing protocol for FANETS. In Proceedings of the 2018 IEEE 4th International Conference on Computer and Communications (ICCC), Chengdu, China, 7–10 December 2018; pp. 301–305. [Google Scholar]
- Schmidt, J.F.; Schilcher, U.; Atiq, M.K.; Bettstetter, C. Interference prediction in wireless networks: Stochastic geometry meets recursive filtering. IEEE Trans. Veh. Technol. 2021, 70, 2783–2793. [Google Scholar] [CrossRef]
- Cong, Y.; Zhou, X.; Kennedy, R.A. Interference prediction in mobile ad hoc networks with a general mobility model. IEEE Trans. Wirel. Commun. 2015, 14, 4277–4290. [Google Scholar] [CrossRef]
- Surzhik, D.I.; Kuzichkin, O.R.; Vasilyev, G.S. Adaptation of the parameters of the physical layer of data transmission in self-organizing networks based on unmanned aerial vehicles. Int. J. Comput. Sci. Netw. Secur. 2021, 21, 23–28. [Google Scholar]
- Ribeiro, L.M.B.; Müller, I.; Buss Becker, L. Communication interface manager for improving performance of heterogeneous UAV networks. Sensors 2021, 21, 4255. [Google Scholar] [CrossRef] [PubMed]
- Araniti, G.; Iera, A.; Pizzi, S.; Rinaldi, F. Toward 6G non-terrestrial networks. IEEE Netw. 2021, 36, 113–120. [Google Scholar] [CrossRef]
- Rupasinghe, N.; Yapici, Y.; Guvenc, I.; Dai, H.; Bhuyan, A. Physical Layer Security for UAV Communications. In UAV Communications for 5G and Beyond; John Wiley & Sons: Hoboken, NJ, USA, 2020; pp. 373–397. [Google Scholar]
- Wang, J.; Wang, X.; Gao, R.; Lei, C.; Feng, W.; Ge, N.; Jin, S.; Quek, T.Q. Physical layer security for UAV communications in 5G and beyond networks. arXiv 2021, arXiv:2105.11332. [Google Scholar]
- Sun, X.; Ng, D.W.K.; Ding, Z.; Xu, Y.; Zhong, Z. Physical Layer Security in UAV Systems: Challenges and Opportunities. IEEE Wirel. Commun. 2019, 26, 40–47. [Google Scholar] [CrossRef]
- Nemati, M.; Baykas, T.; Choi, J. Performance of TDOA and AOA localization techniques for different base-stations topologies. In Proceedings of the 2019 13th International Conference on Signal Processing and Communication Systems (ICSPCS), Surfers Paradise, Australia, 16–18 December 2019; pp. 1–7. [Google Scholar]
- Lu, R.; Wu, Q.; Zhang, R. Pilot decontamination for massive MIMO network with UAVs. IEEE Wirel. Commun. Lett. 2020, 9, 1830–1834. [Google Scholar] [CrossRef]
- Lee, J.H.; Park, K.H.; Ko, Y.C.; Alouini, M.S. Throughput maximization of mixed FSO/RF UAV-aided mobile relaying with a buffer. IEEE Trans. Wirel. Commun. 2020, 20, 683–694. [Google Scholar] [CrossRef]
- Lu, R.R.; Ma, Y.; Lin, S.H.; Zhang, B.; Wang, Q.; Wang, J.Y. Energy-efficient trajectory optimization for UAV-based hybrid FSO/RF communications with buffer constraints. Entropy 2021, 23, 1596. [Google Scholar] [CrossRef]
- Hou, T.; Liu, Y.; Song, Z.; Sun, X.; Chen, Y. Exploiting NOMA for UAV communications in large-scale cellular networks. IEEE Trans. Commun. 2019, 67, 6897–6911. [Google Scholar] [CrossRef]
- Zhai, D.; Li, H.; Tang, X.; Zhang, R.; Ding, Z.; Yu, F.R. Height optimization and resource allocation for NOMA enhanced UAV-aided relay networks. IEEE Trans. Commun. 2020, 69, 962–975. [Google Scholar] [CrossRef]
- Feng, W.; Tang, J.; Zhao, N.; Fu, Y.; Zhang, X.; Cumanan, K.; Wong, K.K. NOMA-based UAV-aided networks for emergency communications. China Commun. 2020, 17, 54–66. [Google Scholar] [CrossRef]
- Yanmaz, E. Positioning aerial relays to maintain connectivity during drone team missions. Ad. Hoc. Netw. 2022, 128, 102800. [Google Scholar] [CrossRef]
- Yanmaz, E. Dynamic Relay Selection and Positioning for Cooperative UAV Networks. IEEE Netw. Lett. 2021, 3, 114–118. [Google Scholar] [CrossRef]
- Arani, A.H.; Hu, P.; Zhu, Y. Re-envisioning space-air-ground integrated networks: Reinforcement learning for link optimization. In Proceedings of the ICC 2021-IEEE International Conference on Communications, Xiamen, China, 28–30 July 2021; pp. 1–7. [Google Scholar]
- Agarwal, A.; Mishra, D. Altitude Optimization for DF Relaying Trajectory of UAV in Cooperative FANET. In Proceedings of the GLOBECOM 2020–2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Ullah, Z.; Al-Turjman, F.; Moatasim, U.; Mostarda, L.; Gagliardi, R. UAVs joint optimization problems and machine learning to improve the 5G and Beyond communication. Comput. Netw. 2020, 182, 107478. [Google Scholar] [CrossRef]
- You, W.; Dong, C.; Wu, Q.; Qu, Y.; Wu, Y.; He, R. Joint task scheduling, resource allocation, and UAV trajectory under clustering for FANETs. China Commun. 2022, 19, 104–118. [Google Scholar] [CrossRef]
- Singh, R.; Qu, C.; Esquivel Morel, A.; Calyam, P. Location Prediction and Trajectory Optimization in Multi-UAV Application Missions. In Intelligent Unmanned Air Vehicles Communications for Public Safety Networks; Springer: Berlin/Heidelberg, Germany, 2022; pp. 105–131. [Google Scholar]
- Albu-Salih, A.T.; Khudhair, H.A.; Hilal, O.M. Data acquisition time minimization in FANET-based IoT networks. Kuwait J. Sci. 2022, 49. [Google Scholar] [CrossRef]
- Da Silva, I.D.; Caillouet, C.; Coudert, D. Optimizing FANET deployment for mobile sensor tracking in disaster management scenario. In Proceedings of the 2021 International Conference on Information and Communication Technologies for Disaster Management (ICT-DM), Hangzhou, China, 3–5 December 2021; pp. 134–141. [Google Scholar]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Liu, K.; Zheng, J. UAV Trajectory Optimization for Time-Constrained Data Collection in UAV-Enabled Environmental Monitoring Systems. IEEE Internet Things J. 2022. [Google Scholar] [CrossRef]
- Park, Y.M.; Tun, Y.K.; Han, Z.; Hong, C.S. Trajectory Optimization and Phase-Shift Design in IRS-Assisted UAV Network for Smart Railway. IEEE Trans. Veh. Technol. 2022, 71, 11317–11321. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Yagoubi, M.B. A survey on position-based routing protocols for Flying Ad hoc Networks (FANETs). Veh. Commun. 2017, 10, 29–56. [Google Scholar] [CrossRef]
- Yang, H.; Liu, Z. An optimization routing protocol for FANETs. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 1–8. [Google Scholar] [CrossRef]
- AlKhatieb, A.; Felemban, E.; Naseer, A. Performance evaluation of ad hoc routing protocols in (FANETs). In Proceedings of the 2020 IEEE wireless communications and networking conference workshops (WCNCW), Seoul, Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Tareque, M.H.; Hossain, M.S.; Atiquzzaman, M. On the routing in flying ad hoc networks. In Proceedings of the 2015 federated conference on computer science and information systems (FedCSIS), Lodz, Poland, 13–16 September 2015; pp. 1–9. [Google Scholar]
- Ghanem, S.A.; Gharsellaoui, A.E.; Tarchi, D.; Vanelli Coralli, A. Physical layer aware adaptive network coding schemes for satellite communications. Int. J. Satell. Commun. Netw. 2017, 35, 537–549. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Lagraa, N.; Yagoubi, M.B. CRUV: Connectivity-based traffic density aware routing using UAVs for VANets. In Proceedings of the 2015 International Conference on Connected Vehicles and Expo (ICCVE), Shenzhen, China, 19–23 October 2015; pp. 68–73. [Google Scholar] [CrossRef]
- Fabra, F.; Zamora, W.; Reyes, P.; Sanguesa, J.A.; Calafate, C.T.; Cano, J.C.; Manzoni, P. MUSCOP: Mission-Based UAV Swarm Coordination Protocol. IEEE Access 2020, 8, 72498–72511. [Google Scholar] [CrossRef]
- Ammad Uddin, M.; Mansour, A.; Le Jeune, D.; Ayaz, M.; Aggoune, E.H.M. UAV-assisted dynamic clustering of wireless sensor networks for crop health monitoring. Sensors 2018, 18, 555. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Ni, W.; Wang, X.; Liu, R.P.; Kanhere, S.S.; Jha, S. Energy-efficient cooperative relaying for unmanned aerial vehicles. IEEE Trans. Mob. Comput. 2015, 15, 1377–1386. [Google Scholar] [CrossRef]
- Sanchez-Aguero, V.; Gonzalez, L.F.; Valera, F.; Vidal, I.; López da Silva, R.A. Cellular and virtualization technologies for uavs: An experimental perspective. Sensors 2021, 21, 3093. [Google Scholar] [CrossRef]
- Kuiper, E.; Nadjm-Tehrani, S. Geographical Routing With Location Service in Intermittently Connected MANETs. IEEE Trans. Veh. Technol. 2011, 60, 592–604. [Google Scholar] [CrossRef]
- Lindgren, A.; Doria, A.; Schelén, O. Probabilistic Routing in Intermittently Connected Networks. SIGMOBILE Mob. Comput. Commun. Rev. 2003, 7, 19–20. [Google Scholar] [CrossRef]
- Spyropoulos, T.; Psounis, K.; Raghavendra, C.S. Spray and Wait: An Efficient Routing Scheme for Intermittently Connected Mobile Networks. In Proceedings of the 2005 ACM SIGCOMM Workshop on Delay-Tolerant Networking; Association for Computing Machinery: New York, NY, USA, 2005; WDTN ’05; pp. 252–259. [Google Scholar] [CrossRef]
- Burgess, J.; Gallagher, B.; Jensen, D.; Levine, B.N. MaxProp: Routing for Vehicle-Based Disruption-Tolerant Networks. In Proceedings of the IEEE INFOCOM 2006, 25th IEEE International Conference on Computer Communications, Barcelona, Spain, 23–29 April 2006; pp. 1–11. [Google Scholar] [CrossRef]
- Jabbar, A.; Sterbenz, J.P.G. AeroRP: A Geolocation Assisted Aeronautical Routing Protocol for Highly Dynamic Telemetry Environments. In Proceedings of the International Telemetering Conference, Las Vegas, NV, USA, 21–24 October 2009; pp. 1–10. [Google Scholar]
- Whitbeck, J.; Conan, V. HYMAD: Hybrid DTN-MANET routing for dense and highly dynamic wireless networks. Comput. Commun. 2010, 33, 1483–1492. [Google Scholar] [CrossRef]
- Khawaja, W.; Guvenc, I.; Matolak, D.W.; Fiebig, U.C.; Schneckenburger, N. A Survey of Air-to-Ground Propagation Channel Modeling for Unmanned Aerial Vehicles. IEEE Commun. Surv. Tutorials 2019, 21, 2361–2391. [Google Scholar] [CrossRef]
- Scott, K.; Burleigh, S. Technical Report. RFC 5050. November 2007. Bundle Protocol Specification. Available online: https://www.rfc-editor.org/rfc/rfc5050 (accessed on 28 June 2022).
- Cheng, C.M.; Hsiao, P.H.; Kung, H.T.; Vlah, D. Maximizing Throughput of UAV-Relaying Networks with the Load-Carry-and-Deliver Paradigm. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 4417–4424. [Google Scholar] [CrossRef]
- Fu, Y.; Ding, M.; Zhou, C.; Hu, H. Route Planning for Unmanned Aerial Vehicle (UAV) on the Sea Using Hybrid Differential Evolution and Quantum-Behaved Particle Swarm Optimization. IEEE Trans. Syst. Man, Cybern. Syst. 2013, 43, 1451–1465. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Kak, A.; Nie, S. 6G and Beyond: The Future of Wireless Communications Systems. IEEE Access 2020, 8, 133995–134030. [Google Scholar] [CrossRef]
- Yang, H.; Alphones, A.; Xiong, Z.; Niyato, D.; Zhao, J.; Wu, K. Artificial-Intelligence-Enabled Intelligent 6G Networks. IEEE Netw. 2020, 34, 272–280. [Google Scholar] [CrossRef]
- Zhang, C.; Patras, P.; Haddadi, H. Deep Learning in Mobile and Wireless Networking: A Survey. IEEE Commun. Surv. Tutorials 2019, 21, 2224–2287. [Google Scholar] [CrossRef]
- Homssi, B.A.; Dakic, K.; Wang, K.; Alpcan, T.; Allen, B.; Kandeepan, S.; Al-Hourani, A.; Saad, W. Artificial Intelligence Techniques for Next-Generation Mega Satellite Networks. arXiv 2022, arXiv:2207.00414. [Google Scholar]
- O’Shea, T.; Hoydis, J. An Introduction to Deep Learning for the Physical Layer. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 563–575. [Google Scholar] [CrossRef]
- Bkassiny, M.; Li, Y.; Jayaweera, S.K. A Survey on Machine-Learning Techniques in Cognitive Radios. IEEE Commun. Surv. Tutorials 2013, 15, 1136–1159. [Google Scholar] [CrossRef]
- Zorzi, M.; Zanella, A.; Testolin, A.; De Filippo De Grazia, M.; Zorzi, M. Cognition-Based Networks: A New Perspective on Network Optimization Using Learning and Distributed Intelligence. IEEE Access 2015, 3, 1512–1530. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef]
- Mammeri, Z. Reinforcement Learning Based Routing in Networks: Review and Classification of Approaches. IEEE Access 2019, 7, 55916–55950. [Google Scholar] [CrossRef]
- Jung, W.S.; Yim, J.; Ko, Y.B. QGeo: Q-Learning-Based Geographic Ad Hoc Routing Protocol for Unmanned Robotic Networks. IEEE Commun. Lett. 2017, 21, 2258–2261. [Google Scholar] [CrossRef]
- Jin, W.; Gu, R.; Ji, Y. Reward Function Learning for Q-learning-Based Geographic Routing Protocol. IEEE Commun. Lett. 2019, 23, 1236–1239. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Q.; He, C.; Jaffrès-Runser, K.; Xu, Y.; Li, Z.; Xu, Y. QMR:Q-learning based Multi-objective optimization Routing protocol for Flying Ad Hoc Networks. Comput. Commun. 2020, 150, 304–316. [Google Scholar] [CrossRef]
- da Costa, L.A.L.; Kunst, R.; Pignaton de Freitas, E. Q-FANET: Improved Q-learning based routing protocol for FANETs. Comput. Netw. 2021, 198, 108379. [Google Scholar] [CrossRef]
- He, C.; Liu, S.; Han, S. A Fuzzy Logic Reinforcement Learning-Based Routing Algorithm For Flying Ad Hoc Networks. In Proceedings of the 2020 International Conference on Computing, Networking and Communications (ICNC), Big Island, HI, USA, 17–20 February 2020; pp. 987–991. [Google Scholar] [CrossRef]
- Ong, H.Y.; Chavez, K.; Hong, A. Distributed Deep Q-Learning. arXiv 2015, arXiv:1508.04186. [Google Scholar]
- Liu, B.; Ding, Z. A distributed deep reinforcement learning method for traffic light control. Neurocomputing 2022, 490, 390–399. [Google Scholar] [CrossRef]
- Park, J.; Kim, Y.; Seok, J. Prediction of information propagation in a drone network by using machine learning. In Proceedings of the 2016 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 19–21 October 2016; pp. 147–149. [Google Scholar]
- Kalantari, E.; Bor-Yaliniz, I.; Yongacoglu, A.; Yanikomeroglu, H. User association and bandwidth allocation for terrestrial and aerial base stations with backhaul considerations. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar]
- Wang, L.; Wang, K.; Pan, C.; Chen, X.; Aslam, N. Deep Q-network based dynamic trajectory design for UAV-aided emergency communications. J. Commun. Inf. Networks 2020, 5, 393–402. [Google Scholar] [CrossRef]
- Chen, M.; Saad, W.; Yin, C. Echo state learning for wireless virtual reality resource allocation in UAV-enabled LTE-U networks. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Konečnỳ, J.; McMahan, H.B.; Yu, F.X.; Richtárik, P.; Suresh, A.T.; Bacon, D. Federated learning: Strategies for improving communication efficiency. arXiv 2016, arXiv:1610.05492. [Google Scholar]
- Yang, H.; Zhao, J.; Xiong, Z.; Lam, K.Y.; Sun, S.; Xiao, L. Privacy-preserving federated learning for UAV-enabled networks: Learning-based joint scheduling and resource management. IEEE J. Sel. Areas Commun. 2021, 39, 3144–3159. [Google Scholar] [CrossRef]
- Zeng, T.; Semiari, O.; Mozaffari, M.; Chen, M.; Saad, W.; Bennis, M. Federated learning in the sky: Joint power allocation and scheduling with UAV swarms. In Proceedings of the ICC 2020-2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Mowla, N.I.; Tran, N.H.; Doh, I.; Chae, K. Federated Learning-Based Cognitive Detection of Jamming Attack in Flying Ad-Hoc Network. IEEE Access 2020, 8, 4338–4350. [Google Scholar] [CrossRef]
- Mowla, N.I.; Tran, N.H.; Doh, I.; Chae, K. AFRL: Adaptive federated reinforcement learning for intelligent jamming defense in FANET. J. Commun. Networks 2020, 22, 244–258. [Google Scholar] [CrossRef]
- Ye, Y.; Lei, M.; Zhao, M. A New Frequency Hopping Strategy Based on Federated Reinforcement Learning for FANET. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Virtual, 27 September–8 October 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Bonawitz, K.; Salehi, F.; Konečný, J.; McMahan, B.; Gruteser, M. Federated Learning with Autotuned Communication-Efficient Secure Aggregation. In Proceedings of the 2019 53rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 3–6 November 2019; pp. 1222–1226. [Google Scholar] [CrossRef]
- Camp, T.; Boleng, J.; Davies, V. A survey of mobility models for ad hoc network research. Wirel. Commun. Mob. Comput. 2002, 2, 483–502. [Google Scholar] [CrossRef]
- Shah, Z.; Naeem, M.; Javed, U.; Ejaz, W.; Altaf, M. A compendium of radio resource management in UAV-assisted next generation computing paradigms. Ad. Hoc. Netw. 2022, 131, 102844. [Google Scholar] [CrossRef]
- Nemati, M.; Maham, B.; Pokhrel, S.R.; Choi, J. Modeling RIS empowered outdoor-to-indoor communication in mmWave cellular networks. IEEE Trans. Commun. 2021, 69, 7837–7850. [Google Scholar] [CrossRef]
- Nemati, M.; Park, J.; Choi, J. RIS-assisted coverage enhancement in millimeter-wave cellular networks. IEEE Access 2020, 8, 188171–188185. [Google Scholar] [CrossRef]
- Sarieddeen, H.; Saeed, N.; Al-Naffouri, T.Y.; Alouini, M.S. Next generation terahertz communications: A rendezvous of sensing, imaging, and localization. IEEE Commun. Mag. 2020, 58, 69–75. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Weighted sum power maximization for intelligent reflecting surface aided SWIPT. IEEE Wirel. Commun. Lett. 2019, 9, 586–590. [Google Scholar] [CrossRef]
- Zeng, B.; Song, T.; An, J. A dual-antenna collaborative communication strategy for flying ad hoc networks. IEEE Commun. Lett. 2019, 23, 913–917. [Google Scholar] [CrossRef]
- Choi, J. Optimal Combining and Detection; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Koul, S.K.; Wani, Z. Beam Switching and Wide-Scan Antenna Array. In Novel Millimetre Wave Antennas for MIMO and 5G Applications; Springer: Berlin/Heidelberg, Germany, 2021; pp. 73–92. [Google Scholar]
- Chen, K.; Liu, D.; He, X. Fast Beam Switching Based on Machine Learning for MmWave Massive MIMO Systems. In International Conference on Artificial Intelligence for Communications and Networks; Springer: Berlin/Heidelberg, Germany, 2021; pp. 19–29. [Google Scholar]
- Biomo, J.D.M.M.; Kunz, T.; St-Hilaire, M. Directional antennas in FANETs: A performance analysis of routing protocols. In Proceedings of the 2017 International Conference on Selected Topics in Mobile and Wireless Networking (MoWNeT), Cairo, Egypt, 11–13 April 2017; pp. 1–8. [Google Scholar]
- Kim, S.Y.; Ro, J.H.; Song, H.K. Wireless Transmission System for the Improved Reliability in the Flying Ad-hoc Network. Int. J. Eng. Res. Appl. 2017, 07, 62–66. [Google Scholar] [CrossRef]
- Vaezi, M.; Azari, A.; Khosravirad, S.R.; Shirvanimoghaddam, M.; Azari, M.M.; Chasaki, D.; Popovski, P. Cellular, wide-area, and non-terrestrial IoT: A survey on 5G advances and the road toward 6G. IEEE Commun. Surv. Tutorials 2022, 24, 1117–1174. [Google Scholar] [CrossRef]
- Qi, Y.; Deng, H.; Liu, M.; Li, Z. On the Standardization of Key Enabling Technologies in Non-Terrestrial Network Air-interface Design. In Proceedings of the 2021 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Xiamen, China, 28–30 July 2021; pp. 343–348. [Google Scholar]
- Choi, J.; Ding, J. Network coding for k-repetition in grant-free random access. IEEE Wirel. Commun. Lett. 2021, 10, 2557–2561. [Google Scholar] [CrossRef]
- Perkins, C.E.; Bhagwat, P. Highly dynamic destination-sequenced distance-vector routing (DSDV) for mobile computers. ACM SIGCOMM Comput. Commun. Rev. 1994, 24, 234–244. [Google Scholar] [CrossRef]
- Johnson, D.B.; Maltz, D.A. Dynamic source routing in ad hoc wireless networks. In Mobile computing; Springer: Berlin/Heidelberg, Germany, 1996; pp. 153–181. [Google Scholar]
- Haas, Z. The Zone Routing Protocol (ZRP) for Ad Hoc Networks. IETF Internet draft, draft-ietf-manet-zone-zrp-01.txt. 1998. Available online: https://cir.nii.ac.jp/crid/1574231874891177344 (accessed on 28 June 2022).
- Park, V.; Corson, S. Temporally-Ordered Routing Algorithm (TORA) Version 1 Functional Specification (Internet-Draft); Mobile Ad-hoc Network (MANET) Working Group, IETF: Fremont, CA, USA, 1998. [Google Scholar]
- Royer, E.M.; Perkins, C.E. Ad-hoc on-demand distance vector routing. In Proceedings of the 2nd IEEE Workshop on Mobile Computing Systems and Applications, New Orleans, LA, 25–26 February 1999; Volume 2, pp. 90–100. [Google Scholar]
- Pei, G.; Gerla, M.; Hong, X.; Chiang, C.C. A wireless hierarchical routing protocol with group mobility. In Proceedings of the WCNC. 1999 IEEE Wireless Communications and Networking Conference (Cat. No. 99TH8466), New Orleans, LA, USA, 21–24 September 1999; Volume 3, pp. 1538–1542. [Google Scholar]
- Pei, G.; Gerla, M.; Chen, T.W. Fisheye state routing: A routing scheme for ad hoc wireless networks. In Proceedings of the 2000 IEEE International Conference on Communications. ICC 2000. Global Convergence Through Communications. Conference Record, New Orleans, LA, USA, 18-22 June 2000; Volume 1, pp. 70–74. [Google Scholar]
- Royer, E.M. Multicast Ad Hoc on Demand Distance Vector (MAODV) Routing. IETF Internet Draft, draft-ietf-manet-maodv-00. txt. 2000. Available online: https://cir.nii.ac.jp/crid/1571980075779763200 (accessed on 28 June 2022).
- Jacquet, P.; Muhlethaler, P.; Clausen, T.; Laouiti, A.; Qayyum, A.; Viennot, L. Optimized link state routing protocol for ad hoc networks. In Proceedings of the IEEE International Multi Topic Conference, 2001, IEEE INMIC 2001. Technology for the 21st Century, Lahore, Pakistan, 30–30 December 2001; pp. 62–68. [Google Scholar]
- Ko, J.; Mahajan, A.; Sengupta, R. A network-centric UAV organization for search and pursuit operations. In Proceedings of the IEEE Aerospace Conference, Big Sky, Montana, 9–16 March 2002; Volume 6, p. 6. [Google Scholar]
- Ramasubramanian, V.; Haas, Z.J.; Sirer, E.G. SHARP: A hybrid adaptive routing protocol for mobile ad hoc networks. In Proceedings of the 4th ACM international symposium on Mobile ad hoc Networking & Computing, Annapolis, ML, USA, 1–3 June 2003; pp. 303–314. [Google Scholar]
- Ogier, R.; Templin, F.; Lewis, M. Topology Dissemination Based on Reverse-Path Forwarding (TBRPF); Technical Report; 2004. Available online: https://www.rfc-editor.org/rfc/rfc3684 (accessed on 28 June 2022).
- Forsmann, J.H.; Hiromoto, R.E.; Svoboda, J. A time-slotted on-demand routing protocol for mobile ad hoc unmanned vehicle systems. In Unmanned Systems Technology IX. SPIE; Society of Photo Optical: Bellingham, WA, USA, 2007; Volume 6561, pp. 530–540. [Google Scholar]
- Johnson, D.; Ntlatlapa, N.S.; Aichele, C. Simple Pragmatic Approach to Mesh Routing Using BATMAN. In Proceedings of the 2nd IFIP International Symposium on Wireless Communications and Information Technology in Developing Countries, CSIR, Pretoria, South Africa, 6–7 October 2008; pp. 1–10. [Google Scholar]
- Paul, A.B.; Nandi, S. Modified optimized link state routing (M-OLSR) for wireless mesh networks. In Proceedings of the 2008 International Conference on Information Technology, Busan, Korea, 11–13 November 2008; pp. 147–152. [Google Scholar]
- Liu, K.; Zhang, J.; Zhang, T. The clustering algorithm of UAV networking in near-space. In Proceedings of the 2008 8th International Symposium on Antennas, Propagation and EM theory, Quebec, QC, Canada, 2–5 November 2008; pp. 1550–1553. [Google Scholar]
- Alshbatat, A.I.; Dong, L. Cross layer design for mobile ad hoc unmanned aerial vehicle communication networks. In Proceedings of the 2010 International Conference on Networking, Sensing and Control (ICNSC), Chicago, IL, USA, 10–12 April 2010; pp. 331–336. [Google Scholar]
- Belhassen, M.; Belghith, A.; Abid, M.A. Performance evaluation of a cartography enhanced OLSR for mobile multi-hop ad hoc networks. In Proceedings of the 2011 Wireless Advanced, Biopolis, Singapore, 22–25 March 2011; pp. 149–155. [Google Scholar]
- Pojda, J.; Wolff, A.; Sbeiti, M.; Wietfeld, C. Performance analysis of mesh routing protocols for UAV swarming applications. In Proceedings of the 2011 8th International Symposium on Wireless Communication Systems, Aachen, Germany, 6–9 November 2011; pp. 317–321. [Google Scholar]
- Chroboczek, J. The Babel Routing Protocol; Technical Report; 2011. Available online: https://datatracker.ietf.org/doc/draft-chroboczek-babel-routing-protocol/05/ (accessed on 28 June 2022).
- Li, Y.; Luo, X. Cross layer optimization for cooperative mobile ad hoc UAV network. Int. J. Digit. Content Technol. Its Appl. 2012, 6, 367. [Google Scholar]
- Aggarwal, A.; Gandhi, S.; Chaubey, N.; Shah, P.; Sadhwani, M. AODVSEC: A novel approach to secure Ad Hoc on-Demand Distance Vector (AODV) routing protocol from insider attacks in MANETs. arXiv 2012, arXiv:1208.1959. [Google Scholar] [CrossRef]
- Zang, C.; Zang, S. Mobility prediction clustering algorithm for UAV networking. In Proceedings of the 2011 IEEE Globecom Workshops (GC Wkshps), Anaheim, CA, USA, 3–7 December 2012; pp. 1158–1161. [Google Scholar]
- Rosati, S.; Krużelecki, K.; Traynard, L.; Mobile, B.R. Speed-aware routing for UAV ad hoc networks. In Proceedings of the 2013 IEEE globecom workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1367–1373. [Google Scholar]
- Wei, Y.; Blake, M.B.; Madey, G.R. An operation-time simulation framework for UAV swarm configuration and mission planning. Procedia Comput. Sci. 2013, 18, 1949–1958. [Google Scholar] [CrossRef]
- Zhai, Z.; Du, J.; Ren, Y. The application and improvement of temporally ordered routing algorithm in swarm network with unmanned aerial vehicle nodes. In Proceedings of the IEEE ICWMC, Nice, France, 21–26 July 2013; pp. 7–12. [Google Scholar]
- Zheng, Y.; Wang, Y.; Li, Z.; Dong, L.; Jiang, Y.; Zhang, H. A mobility and load aware OLSR routing protocol for UAV mobile ad hoc networks. 2014. Available online: https://digital-library.theiet.org/content/conferences/10.1049/cp.2014.0575 (accessed on 28 June 2022).
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Lagraa, N.; Yagoubi, M.B. Intelligent UAV-assisted routing protocol for urban VANETs. Comput. Commun. 2017, 107, 93–111. [Google Scholar] [CrossRef]
- Iordanakis, M.; Yannis, D.; Karras, K.; Bogdos, G.; Dilintas, G.; Amirfeiz, M.; Colangelo, G.; Baiotti, S. Ad-hoc routing protocol for aeronautical mobile ad hoc networks. In Proceedings of the Fifth International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Patras, Greece, 19-21 July 2006; pp. 1–5. [Google Scholar]
- Flury, R.; Wattenhofer, R. Randomized 3D geographic routing. In Proceedings of the IEEE INFOCOM 2008-The 27th Conference on Computer Communications, Phoenix, AZ, USA, 15–17 April 2008; pp. 834–842. [Google Scholar]
- Lidowski, R.L.; Mullins, B.E.; Baldwin, R.O. A novel communications protocol using geographic routing for swarming uavs performing a search mission. In Proceedings of the 2009 IEEE International Conference on Pervasive Computing and Communications, Galveston, TX, USA, 09-13 March 2009; pp. 1–7. [Google Scholar]
- Liu, C.; Wu, J. Efficient geometric routing in three dimensional ad hoc networks. In Proceedings of the IEEE INFOCOM 2009, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 2751–2755. [Google Scholar]
- Ni, M.; Zhong, Z.; Wu, H.; Zhao, D. A new stable clustering scheme for highly mobile ad hoc networks. In Proceedings of the 2010 IEEE Wireless Communication and Networking Conference, Sydney, Australia, 18–21 April 2010; pp. 1–6. [Google Scholar]
- Zhou, J.; Chen, Y.; Leong, B.; Sundaramoorthy, P.S. Practical 3D geographic routing for wireless sensor networks. In Proceedings of the 8th ACM Conference on Embedded Networked Sensor Systems, Zurich, Switzerland, 3–5 November 2010; pp. 337–350. [Google Scholar]
- Shirani, R. Reactive-greedy-reactive in unmanned aeronautical ad hoc networks: A combinational routing mechanism. Ph.D. Thesis, Carleton University, Ottawa, ON, Canada, 2011. [Google Scholar]
- Shirani, R.; St-Hilaire, M.; Kunz, T.; Zhou, Y.; Li, J.; Lamont, L. The performance of greedy geographic forwarding in unmanned aeronautical ad hoc networks. In Proceedings of the 2011 Ninth Annual Communication Networks and Services Research Conference, Ottawa, ON, Canada, 2–5 May 2011; pp. 161–166. [Google Scholar]
- Medina, D.; Hoffmann, F.; Rossetto, F.; Rokitansky, C.H. A geographic routing strategy for north atlantic in-flight internet access via airborne mesh networking. IEEE/ACM Trans. Netw. 2011, 20, 1231–1244. [Google Scholar] [CrossRef]
- Lin, L.; Sun, Q.; Li, J.; Yang, F. A novel geographic position mobility oriented routing strategy for UAVs. J. Comput. Inf. Syst. 2012, 8, 709–716. [Google Scholar]
- Lin, L.; Sun, Q.; Wang, S.; Yang, F. A geographic mobility prediction routing protocol for ad hoc UAV network. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1597–1602. [Google Scholar]
- Biomo, J.D.M.M.; Kunz, T.; St-Hilaire, M. Routing in unmanned aerial ad hoc networks: A recovery strategy for Greedy geographic forwarding failure. In Proceedings of the 2014 IEEE Wireless Communications and Networking Conference (WCNC), Istanbul, Turkey, 6–9 April 2014; pp. 2236–2241. [Google Scholar] [CrossRef]
- Rosário, D.; Zhao, Z.; Braun, T.; Cerqueira, E.; Santos, A.; Alyafawi, I. Opportunistic routing for multi-flow video dissemination over flying ad hoc networks. In Proceedings of the IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks 2014, Sydney, Australia, 19 June 2014; pp. 1–6. [Google Scholar]
- Oubbati, O.S.; Lakas, A.; Lagraa, N.; Yagoubi, M.B. UVAR: An intersection UAV-assisted VANET routing protocol. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar]
- Sbeiti, M.; Goddemeier, N.; Behnke, D.; Wietfeld, C. PASER: Secure and Efficient Routing Approach for Airborne Mesh Networks. IEEE Trans. Wirel. Commun. 2016, 15, 1950–1964. [Google Scholar] [CrossRef]
- Maxa, J.A.; Ben Mahmoud, M.S.; Larrieu, N. Joint Model-Driven design and real experiment-based validation for a secure UAV Ad hoc Network routing protocol. In Proceedings of the 2016 Integrated Communications Navigation and Surveillance (ICNS), Herndon, VA, USA, 19–21 April 2016; pp. 1E2–1–1E2–16. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Main Focus | NTN Components | App. | Commun. | Physical Layer | UAV Role Management & Trajectory | Routing | DTN-FANET Framework | AI/ML/DL |
|---|---|---|---|---|---|---|---|---|---|
| This Survey | FANET in NTN, state-of-the-art FANET, features of FANET, DTN-FANET perspective, UAVs trajectory/mobility | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| [17] | Difference between FANET/VANET/MANET, design criteria | x | ✓ | ✓ | ✓ | x | ✓ | x | x |
| [18] | Various routing protocols in FANET, features of FANET | x | ✓ | ✓ | x | x | ✓ | x | x |
| [23] | FANET architecture, mobility models, routing protocols | x | ✓ | ✓ | x | x | ✓ | x | x |
| [24] | Communication issues, routing, mobility, security | x | ✓ | x | x | ✓ | ✓ | x | x |
| [36] | Different routing protocols for FANET, architecture | x | x | ✓ | x | x | ✓ | x | x |
| [37] | Routing requirements of FANET, evaluation of existing routing protocols, UAV classification | x | ✓ | ✓ | x | x | ✓ | x | x |
| [39] | Existing routing protocols | x | x | x | x | x | ✓ | x | x |
| [43] | Power efficient protocols across physical, data link and network layers in FANET | x | x | ✓ | ✓ | x | ✓ | x | x |
| [44] | Routing demands, UAV functionalities, energy efficiency | x | x | x | x | ✓ | ✓ | x | x |
| [45] | Various cooperative approaches for FANET | x | ✓ | ✓ | x | x | x | x | x |
| [46] | Cluster-based routing protocols and their characteristics | x | x | x | x | x | ✓ | x | x |
| [38] | Mobility models and routing protocols | ✓ | x | ✓ | x | ✓ | ✓ | x | x |
| [47] | Joint trajectory and communication design for FANET | x | x | ✓ | x | ✓ | x | x | x |
| [48] | AI-based trajectory and routing protocols for FANET | x | x | x | x | ✓ | ✓ | x | ✓ |
| Type | Altitude [km] | Speed [km/s] | Uses | RTT [ms] | Coverage Ranking |
|---|---|---|---|---|---|
| GEO Sat. | 35–800 [] | ∼3 | Relay, BB | ∼500 | 1 |
| MEO Sat. | 2–35 [] | ∼4.2 | Navigation, relay, backhauling | ∼200 | 2 |
| LEO Sat. | 180–2000 | ∼8 | High speed BB, imaging, backhauling | ∼40 | 3 |
| HAP | ∼ 20 | <0.3 | Fixed/mobile BB, Short/midterm backhauling. | 0.13–0.33 | 4 |
| UAVs | <0.5 | <0.07 | Communication, sensing, relay, high resolution imaging | ∼1 | 5 |
| System Parameters | Corresponding Value |
|---|---|
| Number of UAVs | 2, 6, 10 |
| Speed of UAVs | Varies between 1 m/s to 5 m/s |
| Speed of mobile user | 1 m/s |
| Interface model | Bluetooth (IEEE 802.15.1) and WiFi (IEEE 802.11b/g/n) |
| Transmit speed | 250 kBps |
| Message size | 250 KB |
| Transmit range | Bluetooth: 20 m, WiFi: 100 m |
| Buffer Size | 10 GB |
| Mobility model | Random Waypoint |
| Message TTL | 300 min |
| Simulation running time | 12 h |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nemati, M.; Al Homssi, B.; Krishnan, S.; Park, J.; Loke, S.W.; Choi, J. Non-Terrestrial Networks with UAVs: A Projection on Flying Ad-Hoc Networks. Drones 2022, 6, 334. https://doi.org/10.3390/drones6110334
Nemati M, Al Homssi B, Krishnan S, Park J, Loke SW, Choi J. Non-Terrestrial Networks with UAVs: A Projection on Flying Ad-Hoc Networks. Drones. 2022; 6(11):334. https://doi.org/10.3390/drones6110334
Chicago/Turabian StyleNemati, Mahyar, Bassel Al Homssi, Sivaram Krishnan, Jihong Park, Seng W. Loke, and Jinho Choi. 2022. "Non-Terrestrial Networks with UAVs: A Projection on Flying Ad-Hoc Networks" Drones 6, no. 11: 334. https://doi.org/10.3390/drones6110334
APA StyleNemati, M., Al Homssi, B., Krishnan, S., Park, J., Loke, S. W., & Choi, J. (2022). Non-Terrestrial Networks with UAVs: A Projection on Flying Ad-Hoc Networks. Drones, 6(11), 334. https://doi.org/10.3390/drones6110334