
Deep Learning and Artificial Neural Networks for Spacecraft Dynamics, Navigation and Control



Abstract
1. Introduction
- to introduce the bases of machine learning and deep learning that are rapidly growing within the space community;
- to present a review of the most common artificial neural network architectures used in the space domain, together with emerging techniques that are still theoretical;
- to present specific applications extrapolating the underlying cores of the different algorithms; in particular, the hybrid applications are highlighted, where novel Artificial Intelligence techniques are coupled with traditional algorithms to solve their shortcomings;
- to provide a performance comparison of different neural approaches used in guidance, navigation and control applications that exist in the literature. In general, it is hard to attribute quantitative metrics to such evaluations, since the applicative scenarios reported in the literature are different. The paper attempts to condense the information into a more qualitative comparison.
2. Machine Learning and Deep Learning
- Supervised learning: Given the known outputs , we learn to yield the correct output when new datasets are fed.
- Unsupervised Learning: The algorithms exploit regularities in the data to generate an alternative representation used for reasoning, predicting or clustering.
- Reinforcement Learning: Producing actions that affect the environment and receiving rewards . Reinforcement learning is all about learning what to do (i.e., mapping situations to actions) so as to maximize a numerical reward.
2.1. Supervised Learning
2.2. Unsupervised Learning
2.3. Reinforcement Learning
- Policy: defines the learning agent’s way of behaving at a given time. Mapping from perceived states of the environment to actions to be taken when in those states.
- Reward: at each time step, the environment sends to the reinforcement learning agent a single number called the reward.
- Value Function: the total amount of reward an agent can expect to accumulate in the future, starting from that state.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model-Free | Model-Based |
|---|---|
| Unknown system dynamics | Learnt system dynamics |
| The agent is not able to make predictions | The agent makes prediction |
| Need for explorations | More sample efficient |
| Lower computational cost | Higher computational cost |
- Value-based methods: These methods seek to find optimal value function V and action-value function Q, from which the optimal policy is directly derived. The value-based methods evaluate states and actions. Value-based methods are, for instance, Q-learning, DQN and SARSA [24].
- Policy-based methods: They are methods whose aim is to search for the optimal policy directly, which provides a feasible framework for continuous control. The most employed policy-based methods are: advantage actor+critic, cross-entropy methods, deep deterministic policy gradient and proximal policy optimization [17,18,19,20,21,22].
2.4. Artificial Neural Networks
- the environment stimulates the neural network;
- the neural network makes changes to the free parameters;
- the neural network responds in a new way according to the new structure.
2.4.1. Universal Approximation Theorem
2.4.2. Training Algorithms
- Batch gradient descent;
- Stochastic gradient descent;
- Conjugate gradient;
- Newton and quasi-Newton methods;
- Levenberg–Marquardt;
- Backpropagation through time.
2.4.3. Incremental Learning
2.4.4. Batch Learning
2.4.5. Overfitting and Online Sampling
- the training dataset is too noisy;
- the training dataset is too small, which causes sampling noise;
- the training set includes uninformative features.
3. Types of Artificial Neural Networks
3.1. Feed-Forward Networks
- Depth: Typical neural networks are actually nested evaluations of different functions, commonly named input, hidden and output layers. In practical applications, low-level features of the dataset are captured by the initial layers up to high-level features learned in the subsequent layer, all the way to the output layer.
- Width: Each layer is generally a vector valued function. The size of this vector valued function, represented by the number of neurons, is the width of the model or layer.
3.1.1. Multilayer Perceptron
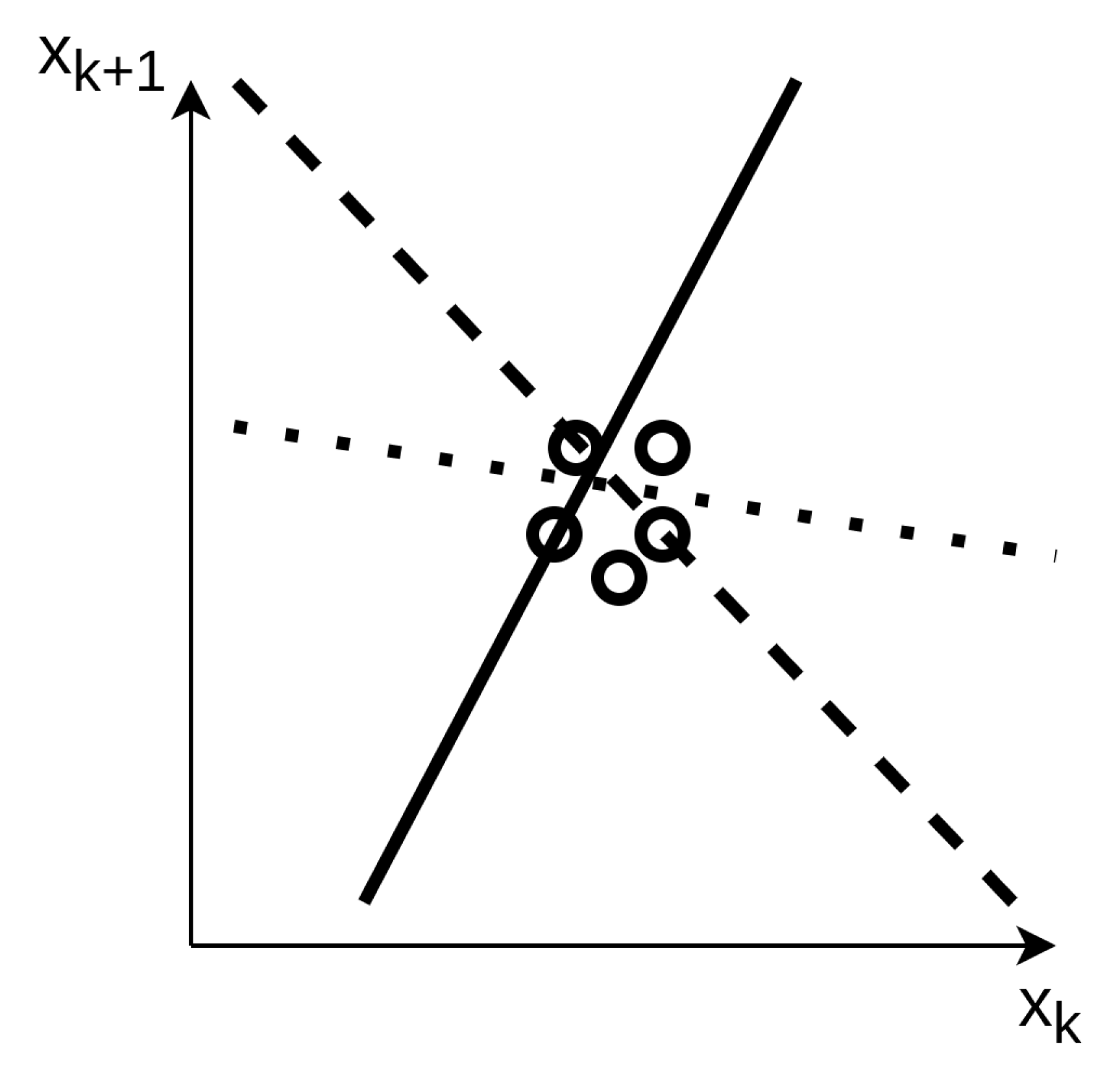
3.1.2. Radial-Basis Function Neural Network
3.1.3. Autoencoders
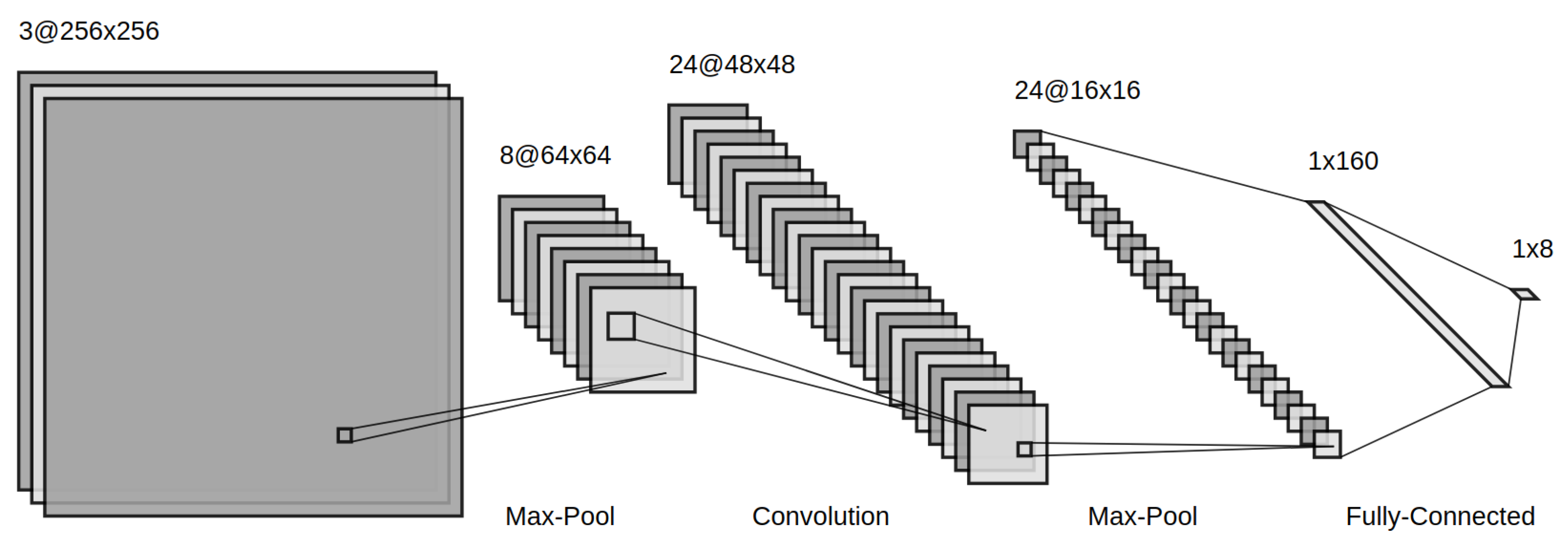
3.1.4. Convolutional Neural Networks
- Low-level features are local;
- Features are translationally invariant;
- High-level features are composed of low-level features.
- Convolutional layer: the convolutional layer is core of the CNN architecture. The convolutional layer is built up by neurons which are not connected to every single neuron from the previous layer but only to those falling inside their receptive field. Such architecture allows the network to identify low-level features in the very first hidden layer, whereas high-level features are combined and identified at later stages in the network. A neuron’s weight can be thought of as a small image, called the filter or convolutional kernel, which is the size of the receptive field. The convolutional layer mimics the convolution operation of a convolutional kernel on the input layer to produce an output layer, often called the feature map. Typically, the neurons that belong to a given convolutional layer all share the same convolutional kernel: this is referred to as parameter sharing in the literature. For this reason, the element-wise multiplication of each neuron’s weight by its receptive field is equivalent to a pure convolution in which the kernel slides across the input layer to generate the feature map. In mathematical terms, a convolutional layer, with convolutional kernel , operating on the previous layer (being either an intermediate feature map or the input image), performs the following operation:where is the position of the output feature map.
- Activation layer: An activation function is utilized as a decision gate that aids the learning process of intricate patterns. The selection of an appropriate activation function can accelerate the learning process [11]. The most common activation functions are the same as those used for the MLP and are presented in Table 4.
- Pooling layer: The objective of a pooling layer is to sub-sample the input image or the previous layer in order to reduce the computational load, the memory usage and the number of parameters, which prevents overfitting while training [11,33]. The pooling layer works exactly with the same principle of the receptive field. However, a pooling neuron has no weights; hence, it aggregates the inputs by calculating the maximum or the average within the receptive field as output.
- Fully-connected layer: Similarly to MLP as for traditional CNN architectures, a fully connected layer is often added right before the output layer to further capture non-linear relationships of the input features [11,32]. The same considerations discussed for MLP hold for CNN fully connected layers.
3.2. Recurrent Neural Networks
3.2.1. Layer-Recurrent Neural Network
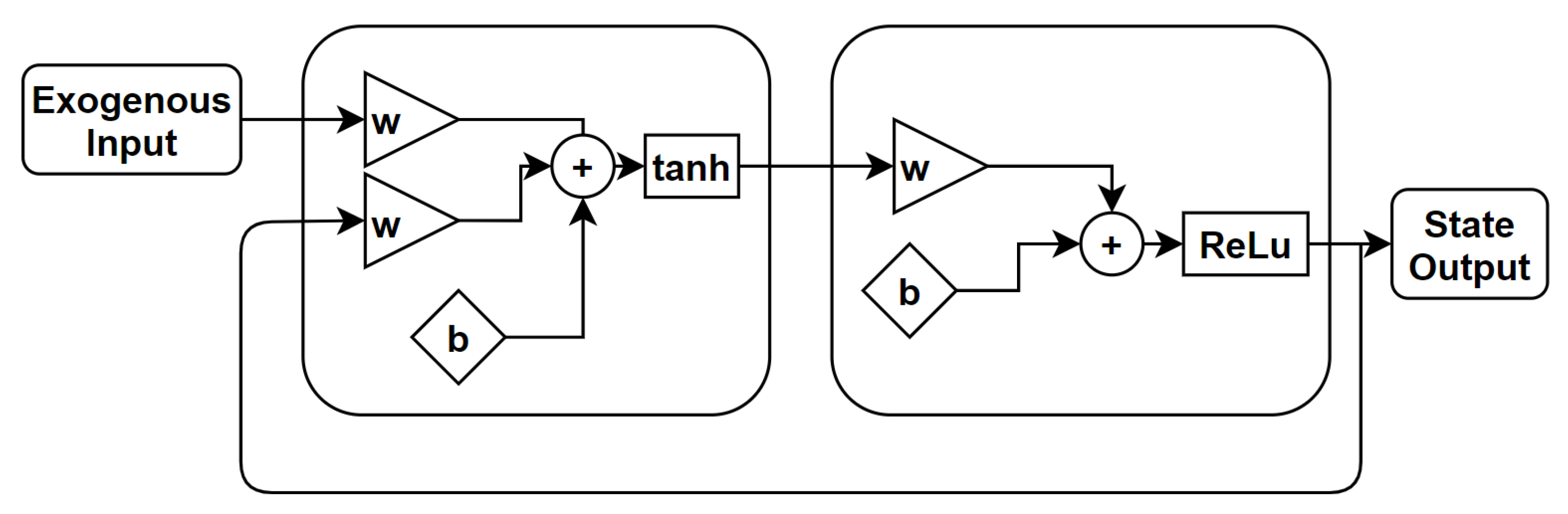
3.2.2. Nonlinear Autoregressive Exogenous Model
3.2.3. Hopfield Neural Network
3.2.4. Long Short-Term Memory
- Cell state (C): The cell state is the core element. It conveys information through different time steps. It is modified by linear interactions with the gates.
- Forget gate (f): The forget gate is used to decide which information to let through. It looks at the input and output of the previous step and yields a number for each element of the cell state. In compact form:
- Input gate (i): The input gate is used to decide what piece of information to include in the cell state. The sigmoid layer is used to decide on which value to update, whereas the describes the entities for modification, namely, the values. It then generates a new estimate for the cell state :
- Memory gate: The memory gate multiplies the old cell state with the output of the forget gate and adds it to the output of the input gate. Often, the memory gate is not reported as a stand-alone gate, due to the fact that it represents a modification of the cell state itself, without a proper sigmoid layer:
- Output gate: The output gate is the final step that delivers the actual output of the network , a filtered version of the cell state. The layer operations read:
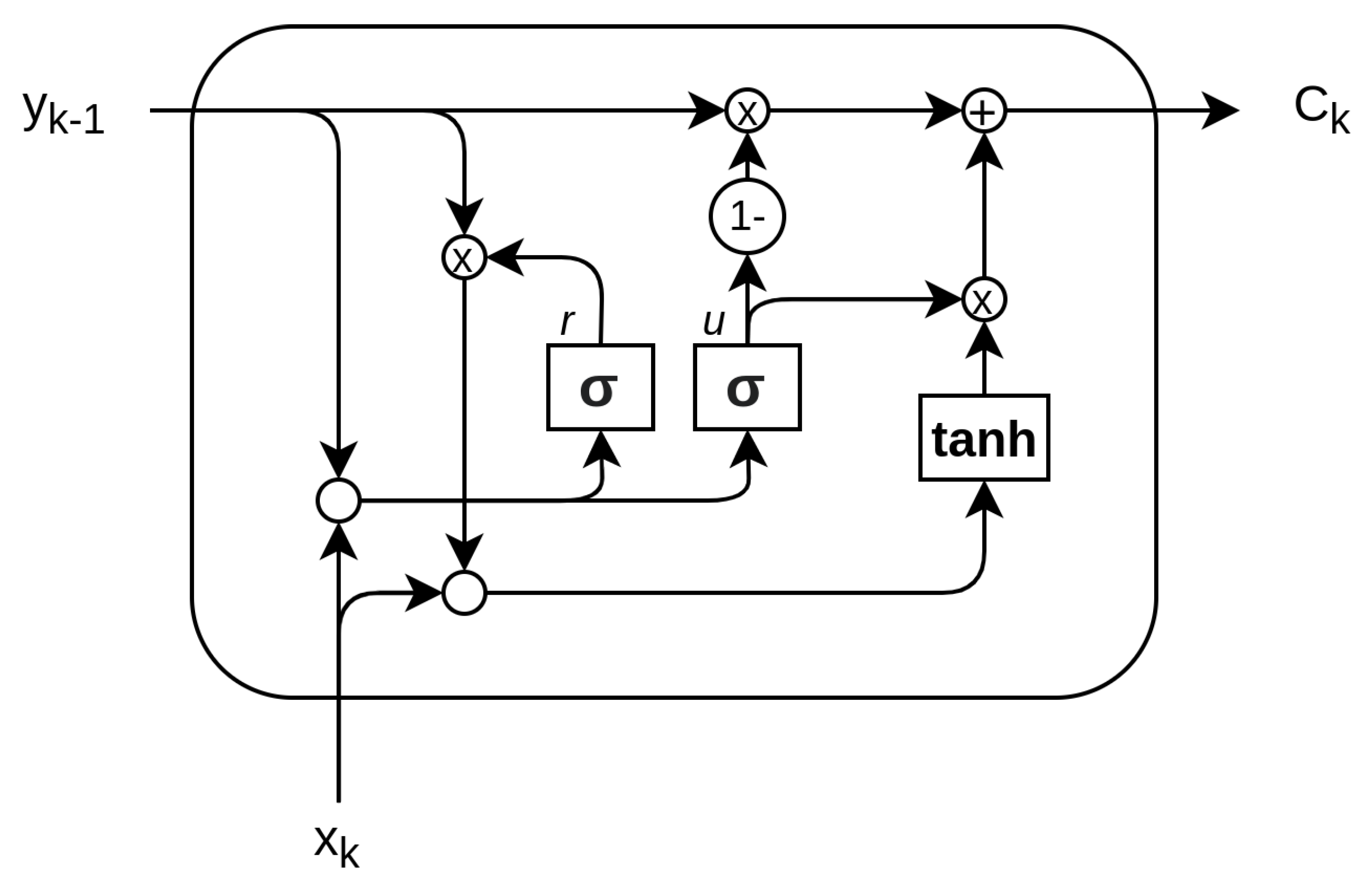
3.2.5. Gated Recurrent Unit
- Update gate (u): The update gate defines how much the unit updates its value or content. It is a simple layer that performs:
- Reset gate r: The reset gate effectively makes the unit process the input sequence, allowing it to forget the previously computed state:
3.3. Spiking Neural Networks
3.3.1. Types of Neurons
- Integrate and fire (IF): The IF neuron model assumes that spike initiation is governed by a voltage threshold. When the synaptic membrane reaches and exceeds a certain threshold, the neuron fires a spike and the membrane is set back to the resting voltage . In mathematical terms, its simplest form reads:
- Leaky integrate and fire (LIF): The LIF neuron is a slightly modified version of the IF neuron model. Indeed, it entails an exponential decrease in membrane potential when not excited. The membrane charges and discharges exponentially in response to injected current. The differential equation governing such behavior can be written as:where is the leak conductance and V is again the membrane potential with respect to the rest value.
3.3.2. Coding Schemes
- Rate coding: it converts the input intensity into a firing rate or spike count;
- Temporal (or latency) coding: it converts the input intensity to a spike time or relative spike time.
- Rate coding: it selects the output neuron with the highest firing rate, or spike count, as the predicted class;
- Temporal (or latency) coding: it selects the output neuron that fires first, or before a given threshold time, as the predicted class
4. Applications in Space
4.1. Identification of Neural Spacecraft Dynamics
4.1.1. Fully Neural Dynamics Learning
4.1.2. Dynamical Uncertainties and Disturbance Reconstruction
- The ANN is used to learn and output an estimate of the disturbance or mismodeled terms that is used in the guidance, navigation and control to deliver a better state, disturbance or error estimate.
- The ANN learning is fully performed incrementally online. This means that no prior knowledge or learning has to be performed beforehand. This dramatically increases the flexibility of the approach.
- The ANN learning does not replace the GNC system, but it rather enhances it and makes it more robust.
4.1.3. System Identification through Reconstruction of Parameters
4.2. Convolutional Neural Networks for Vision-Based Navigation
4.2.1. CNN for Pose Estimation
- An object detection network is used to identify a bounding box surrounding the target spacecraft. Typical CNN architectures are HRNet and Faster RCNN.
- A second regressive network is used to predict the position of the landmark features utilized during training.
- A traditional PnP problem was solved using 2D–3D correspondences to retrieve the camera pose.
4.2.2. CNNs for Planetary and Asteroid Landing
- Hybrid approaches: they utilize CNNs for processing images, extracting features and classifying or regressing the state at the initial condition, but they are always coupled with traditional image processing or a navigation algorithm (e.g., PnP and feature tracking).
- End-to-end approaches: they are developed to complete the whole visual odometry pipeline, from the image input to the state estimate output.
4.3. Reinforcement Learning and Meta-Reinforcement Learning for Adaptive Guidance and Control
4.3.1. Reinforcement Learning
4.3.2. Meta Reinforcement Learning
4.4. Image Dataset Availability and Validation
- Image histogram. The histogram’s information is a low-level information, which gives a good representation of the image content. Such a method has been already used to evaluate images quality for testing of space navigation algorithms [88].
- Shadow index. The synthetic and laboratory images are thresholded to identify shadows. The value of the threshold is identified automatically using the Otsu algorithm. The Otsu method is a deterministic and automatic way to discriminate shadowy and illuminated target parts. Then, the two resulting binary images are subtracted to obtain a shadow disparity map. The accuracy of the shadow representation, which can be considered as representative of the accuracy of the general shape of the sample, is evaluated by a scalar shadow index (), defined as:where is the sum of the disparity map and is the sum of the pixels classified as shadow in the real image. expresses the fraction of pixels in shadows correctly reproduced in the synthetic model.
- Contrast index. A second index is then identified. For both images, real and synthetic, an illumination ratio RI is identified as:where is the mean intensity of the pixel classified as in light, and is the mean intensity of the pixel classified as in shadow. Then, the contrast index is defined as:
- Feature quality index. Typical navigation algorithms rely on feature extraction steps; thus, a comparison among real and synthetic images is considered a good indication of the similarity of behavior among the two. The feature quality index (FQI) indicates the similarity of features extracted in two corresponding frames (a real and a synthetic one), and it is defined as:where is the Hamming distance between two corresponding features descriptors and is the maximum possible hamming distance. The mean value is computed on a user-defined set of corresponding matched features.
4.5. Technical Challenges for AI-Based Algorithms’ Deployment
- Data Availability: A large amount of data is required to generate effective AI-based algorithms. One critical problem is creating representative data, especially images, in synthetic or laboratory environments, as discussed in Section 4.4.
- Model Compression: High-performance AI solutions, based on DNN, often require very large models to be deployed. This negatively affects the following aspects:
- -
- Storage capacity: A DNN model can achieve significant accuracy when it uses a large number of parameters, which requires considerable storage.
- -
- Computational requirements: A large number of floating point operations (FLOPs) involved in the DNN operation can exceed the limited computational capacity of the dedicated hardware.
- -
- Execution time: A large DNN model requires a long time for both training and inference. This could potentially jeopardize its real-time inference performance.
Optimization and model compression techniques are currently being investigated, such as pruning and weight sharing, which help also in terms of energy consumption. - Validation: Given the difficulties in making the AI-based algorithms analytically tractable, it is mandatory to establish a consolidated pipeline to validate the models. Monte Carlo approaches may be the most appropriate solutions to characterizing the behavior, also outside of the training datasets, where inappropriate responses may yield dramatic outcomes.
- Dedicated Hardware: A lot of effort is focused on building and testing dedicated hardware, particularly tailored to execute AI-based models, optimized for inference.
5. Conclusions
- The trade-off between adaptivity and robustness in the design of the GNC system. On the one hand, we are trying to design machine learning systems that evolve continuously by learning via interaction with the dynamical and physical environment. On the other hand, we should pursue optimized solutions that are robust, explainable and secure.
- The AI and ML algorithms borrowed from data science often lack efficiency, robustness and interpretation, being purely data-driven approaches. The foundation of classical GNC theory instead lies in the mapping of physics into the model-based design concept.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| A2C | Advantage Actor Critic |
| AE | Autoencoders |
| AEKF | Adaptive Extended Kalman Filter |
| AI | Artificial Intelligence |
| ANN | Artificial Neural Network |
| BPANN | Back Propagation Artificial Neural Network |
| CNN | Convolutional Neural Network |
| D4PG | Distributed Distributional Deep Deterministic Policy Gradient |
| DCG | Directed Cyclic Graph |
| DL | Deep Learning |
| DPS | Direct Policy Search |
| DQN | Deep Q-Network |
| FFNN | Feed-Forward Neural Networks |
| GNC | Guidance, Navigation & Control |
| GRU | Gated-Recurrent Unit |
| HNN | Hopfield Neural Network |
| IF | Integrate and Fire |
| IMU | Inertial Measurement Unit |
| KRN | Keypoint Regression Network |
| LIF | Leaky-Integrate and Fire |
| LRNN | Layer-Recurrent Neural Network |
| LSTM | Long-Short Term Memory network |
| MDP | Markov Decision Process |
| ML | Machine Learning |
| MLP | Multi-Layer Perceptron |
| NARX | Nonlinear Autoregressive Exogenous Model |
| PnP | Perspective n-Points |
| PPO | Proximal Policy Optimization |
| RBF | Radial-Basis Function |
| RBFNN | Radial-Basis Function Neural Network |
| RL | Reinforcement Learning |
| RNN | Recurrent Neural Network |
| SNN | Spiking Neural Network |
| TL | Transfer Learning |
| VO | Visual Odometry |
References
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; Massachusetts Institute of Technology: Massachusetts, MA, USA, 2016. [Google Scholar]
- Ross, S.; Gordon, G.J.; Bagnell, J.A. No-regret reductions for imitation learning and structured prediction. In Proceedings of the 14th International Conference on Artificial Intelligence and Statistics, Lauderdale, FL, USA, 11–13 April 2011; Volume 15, pp. 627–635. [Google Scholar]
- Fausett, L. Fundamentals of Neural Networks; Pearson: London, UK, 1994. [Google Scholar]
- Lippmann, R. Neural Networks, a Comprehensive Foundation; Prentice Hall: Hoboken, NJ, USA, 2005; Volume 5, pp. 363–364. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; Libris: London, UK, 2017; p. 10884. [Google Scholar] [CrossRef]
- Shirobokov, M.; Trofimov, S.; Ovchinnikov, M. Survey of machine learning techniques in spacecraft control design. Acta Astronaut. 2021, 186, 87–97. [Google Scholar] [CrossRef]
- Song, J.; Rondao, D.; Aouf, N. Deep Learning-based Spacecraft Relative Navigation Methods: A Survey. Acta Astronaut. 2022, 191, 22–40. [Google Scholar] [CrossRef]
- Murphy, J.; Ward, J.E.; Namee, B.M. Machine Learning in Space: A Review of Machine Learning Algorithms and Hardware for Space Applications. CEUR Workshop Proc. 2021, 3105, 72–83. [Google Scholar]
- Izzo, D.; Märtens, M.; Pan, B. A survey on artificial intelligence trends in spacecraft guidance dynamics and control. Astrodynamics 2019, 3, 287–299. [Google Scholar] [CrossRef]
- Carrio, A.; Sampedro, C.; Rodriguez-Ramos, A.; Campoy, P. A review of deep learning methods and applications for unmanned aerial vehicles. J. Sens. 2017, 2017, 3296874. [Google Scholar] [CrossRef]
- Khan, A.; Sohail, A.; Zahoora, U.; Saeed, A. A Survey of the Recent Architectures of Deep Convolutional Neural Networks; Springer: Amsterdam, The Netherlands, 2020; Volume 53, pp. 5455–5516. [Google Scholar] [CrossRef]
- Tipaldi, M.; Iervolino, R.; Massenio, P.R. Reinforcement learning in spacecraft control applications: Advances, prospects, and challenges. Annu. Rev. Control. 2022, in press. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, Z.; Jiang, F.; Zhou, C. Real-Time Optimal Control for Spacecraft Orbit Transfer via Multiscale Deep Neural Networks. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2436–2450. [Google Scholar] [CrossRef]
- Silvestrini, S.; Lunghi, P.; Piccinin, M.; Zanotti, G.; Lavagna, M. Artificial Intelligence Techniques in Autonomous Vision-Based Navigation System for Lunar Landing. In Proceedings of the 71st International Astronautical Congress, Online, 12–14 October 2020; pp. 12–14. [Google Scholar]
- Silvestrini, S.; Lavagna, M. Neural-aided GNC reconfiguration algorithm for distributed space system: Development and PIL test. Adv. Space Res. 2021, 67, 1490–1505. [Google Scholar] [CrossRef]
- Silvestrini, S.; Lavagna, M. Neural-Based Predictive Control for Safe Autonomous Spacecraft Relative Maneuvers. J. Guid. Control. Dyn. 2021, 44, 2303. [Google Scholar] [CrossRef]
- Brandonisio, A. Sensitivity analysis of Adaptive Guidance via Deep Reinforcement Learning for Uncooperative Space Objects Imaging. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Orlando, FL, USA, 9–11 August 2021; pp. 1–20. [Google Scholar]
- Gaudet, B.; Linares, R.; Furfaro, R. Adaptive guidance and integrated navigation with reinforcement meta-learning. Acta Astronaut. 2020, 169, 180–190. [Google Scholar] [CrossRef]
- Gaudet, B.; Linares, R.; Furfaro, R. Terminal adaptive guidance via reinforcement meta-learning: Applications to autonomous asteroid close-proximity operations. Acta Astronaut. 2020, 171, 1–13. [Google Scholar] [CrossRef]
- Gaudet, B.; Linares, R.; Furfaro, R. Six degree-of-freedom body-fixed hovering over unmapped asteroids via LIDAR altimetry and reinforcement meta-learning. Acta Astronaut. 2020, 172, 90–99. [Google Scholar] [CrossRef]
- Scorsoglio, A.; D’Ambrosio, A.; Ghilardi, L.; Gaudet, B.; Curti, F.; Furfaro, R. Image-Based Deep Reinforcement Meta-Learning for Autonomous Lunar Landing. J. Spacecr. Rocket. 2021, 1, 1–13. [Google Scholar] [CrossRef]
- Hovell, K.; Ulrich, S. Deep reinforcement learning for spacecraft proximity operations guidance. J. Spacecr. Rocket 2021, 58, 254–264. [Google Scholar] [CrossRef]
- Brandonisio, A. Deep Reinforcement Learning to Enhance Fly-Around Guidance for Uncooperative Space Objects Smart Imaging. Ph.D. Thesis, Politecnico di Milano, Milan, Italy, 2020. [Google Scholar]
- Brandonisio, A.; Lavagna, M.; Guzzetti, D. Reinforcement Learning for Uncooperative Space Objects Smart Imaging Path-Planning. J. Astronaut. Sci. 2021, 68, 1145–1169. [Google Scholar] [CrossRef]
- Furfaro, R.; Bloise, I.; Orlandelli, M.; Di Lizia, P.; Topputo, F.; Linares, R. Deep Learning for Autonomous Lunar Landing. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Portland, ME, USA, 19–23 August 2018. [Google Scholar]
- Silvestrini, S.; Lavagna, M. Inverse Reinforcement Learning for Collision Avoidance and Trajectory Prediction in Distributed Reconfigurations. In Proceedings of the 70th International Astronautical Congress, Washington, DC, USA, 21–25 October 2019; pp. 21–25. [Google Scholar]
- Silvestrini, S.; Lavagna, M. Relative Trajectories Identification in Distributed Spacecraft Formation Collision-Free Maneuvers using Neural-Reconstructed Dynamics. In Proceedings of the AIAA Scitech 2020 Forum, Kissimmee, FL, USA, 8–12 January 2020; pp. 1–14. [Google Scholar] [CrossRef]
- Silvestrini, S.; Lavagna, M. Processor-in-the-Loop Testing of AI-aided Algorithms for Spacecraft GNC. In Proceedings of the 71st International Astronautical Congress, Online, 12–14 October 2020; pp. 12–14. [Google Scholar]
- Pesce, V.; Silvestrini, S.; Lavagna, M. Radial basis function neural network aided adaptive extended Kalman filter for spacecraft relative navigation. Aerosp. Sci. Technol. 2020, 96, 105527. [Google Scholar] [CrossRef]
- Harl, N.; Rajagopal, K.; Balakrishnan, S.N. Neural network based modified state observer for orbit uncertainty estimation. J. Guid. Control. Dyn. 2013, 36, 1194–1209. [Google Scholar] [CrossRef]
- Shrestha, A. Review of Deep Learning Algorithms and Architectures. IEEE Access 2019, 7, 53040–53065. [Google Scholar] [CrossRef]
- Emmert-Streib, F.; Yang, Z.; Feng, H.; Tripathi, S.; Dehmer, M. An Introductory Review of Deep Learning for Prediction Models With Big Data. Front. Artif. Intell. 2020, 3, 1–23. [Google Scholar] [CrossRef]
- Géron, A. Hands-On Machine Learning with Scikit-Learn, Keras, and TensorFlow; O’Reilly Media: Sebastopol, CA, USA, 2019. [Google Scholar]
- Leeghim, H.; Choi, Y.; Bang, H. Adaptive attitude control of spacecraft using neural networks. Acta Astronaut. 2009, 64, 778–786. [Google Scholar] [CrossRef]
- Bae, J.; Kim, Y. Adaptive controller design for spacecraft formation flying using sliding mode controller and neural networks. J. Frankl. Inst. 2012, 349, 578–603. [Google Scholar] [CrossRef]
- Chu, W.; Wu, S.; Wu, Z.; Wang, Y. Least square based ensemble deep learning for inertia tensor identification of combined spacecraft. Aerosp. Sci. Technol. 2020, 106, 106189. [Google Scholar] [CrossRef]
- Chu, W.; Wu, S.; He, X.; Liu, Y. Deep learning-based inertia tensor identification of the combined spacecraft. J. Aerosp. Eng. 2020, 234, 1356–1366. [Google Scholar] [CrossRef]
- Zou, A.M.; Kumar, K.D. Neural network-based distributed attitude coordination control for spacecraft formation flying with input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 1155–1162. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Wang, H.; Zhang, B.; Du, K.L. Using Radial Basis Function Networks for Function Approximation and Classification. ISRN Appl. Math. 2012, 2012, 1–34. [Google Scholar] [CrossRef]
- Masti, D.; Bemporad, A. Learning Nonlinear State-Space Models Using Deep Autoencoders. In Proceedings of the IEEE Conference on Decision and Control, Paris, France, 11–13 December 2019; Volume 2018-12, pp. 3862–3867. [Google Scholar] [CrossRef]
- Nelles, O. Nonlinear System Identification; Springer: London, UK, 2003; Volume 39, pp. 564–568. [Google Scholar]
- Hopfield, J.J. Neurons with graded response have collective computational properties like those of two-state neurons. Proc. Natl. Acad. Sci. USA 1984, 81, 3088–3092. [Google Scholar] [CrossRef]
- Abe. Theories on the Hopfield neural networks. In Proceedings of the International 1989 Joint Conference on Neural Networks, Washington, DC, USA, 6 August 1989; Volume 1, pp. 557–564. [Google Scholar]
- Pasquale, A.; Silvestrini, S.; Capannolo, A.; Lavagna, M. Non-Uniform Gravity Field Model On-Board Learning During Small Bodies Proximity Operations. In Proceedings of the 70th International Astronautical Congress, Washington, DC, USA, 21–25 October 2019; pp. 21–25. [Google Scholar]
- Atencia, M.; Joya, G.; Sandoval, F. Parametric identification of robotic systems with stable time-varying Hopfield networks. Neural Comput. Appl. 2004, 13, 270–280. [Google Scholar] [CrossRef]
- Hernández-Solano, Y.; Atencia, M.; Joya, G.; Sandoval, F. A Discrete Gradient Method to Enhance the Numerical Behaviour of Hopfield Networks. Neurocomputers 2015, 164, 45–55. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Cho, K.; van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations using RNN Encoder–Decoder for Statistical Machine Translation. In Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing (EMNLP), Doha, Qatar, 25–29 October 2014; Association for Computational Linguistics: London, UK, 2014; pp. 1724–1734. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. In Proceedings of the NIPS 2014 Workshop on Deep Learning, Montreal, BC, Canada, 12 December 2014. [Google Scholar]
- Ponulak, F.; Kasiński, A. Information Processing, Learning and Applications; Springer: Amsterdam, The Netherlands, 2011; pp. 409–433. [Google Scholar]
- Eshraghian, J.K.; Ward, M.; Neftci, E.; Wang, X.; Lenz, G.; Dwivedi, G.; Bennamoun, M.; Jeong, D.S.; Lu, W.D. Training Spiking Neural Networks Using Lessons from Deep Learning; Cornell University: Ithaca, NY, USA, 2021; pp. 1–44. [Google Scholar]
- Pfeiffer, M.; Pfeil, T. Deep Learning With Spiking Neurons: Opportunities and Challenges. Front. Neurosci. 2018, 12, 774. [Google Scholar] [CrossRef]
- Nguyen, D.A.; Tran, X.T.; Iacopi, F. A review of algorithms and hardware implementations for spiking neural networks. J. Low Power Electron. Appl. 2021, 11, 23. [Google Scholar] [CrossRef]
- Biggs, J.D.; Fournier, H.; Ceccherini, S.; Topputo, F. Optimal de-tumbling of spacecraft with four thrusters. In Proceedings of the 5th CEAS Conference on Guidance, Navigation & Control, Milan, Italy, 3–5 April 2019; pp. 1–13. [Google Scholar]
- Silvestrini, S.; Lavagna, M. Model-Based Reinforcement Learning for Distributed Path Planning. In Proceedings of the Advanced Space Technologies for Robotics and Automation, Big Sky, MN, USA, 2–9 March 2019; pp. 1–7. [Google Scholar]
- Sahoo, H.; Dash, P.; Rath, N. NARX model based nonlinear dynamic system identification using low complexity neural networks and robust H-infinity filter. Appl. Soft Comput. 2013, 13, 3324–3334. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, H.; Zhu, Y.; Wang, F.; Luo, Z. The NARX Model-Based System Identification on Nonlinear, Rotor-Bearing Systems. Appl. Sci. 2017, 7, 911. [Google Scholar] [CrossRef]
- De la Rosa, E.; Yu, W.; Li, X. Nonlinear system modeling with deep neural networks and autoencoders algorithm. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 2157–2162. [Google Scholar] [CrossRef]
- Gurfil, P.; Idan, M.; Kasdin, N.J. Adaptive neural control of deep-space formation flying. J. Guid. Control. Dyn. 2003, 26, 491–501. [Google Scholar] [CrossRef]
- Gao, Y.; Zhao, T.; Jin, B.; Chen, J.; Xu, B. Autonomous Orbit Determination for Lagrangian Navigation Satellite Based on Neural Network Based State Observer. Int. J. Aerosp. Eng. 2017, 2017. [Google Scholar] [CrossRef]
- Alonso, H.; Mendonça, T.; Rocha, P. Hopfield neural networks for on-line parameter estimation. Neural Netw. Off. J. Int. Neural Netw. Soc. 2009, 22, 450–462. [Google Scholar] [CrossRef]
- Turgut, B. Application of back propagation artificial neural networks for gravity field modelling. Acta Montan. Slov. 2016, 21, 200–207. [Google Scholar]
- Gret, A.; Klingele, E.; Kahle, H.G. Application of artificial neural networks for gravity interpretation in two dimensions: A test study. Boll. Geofis. Teor. Appl. 2000, 41, 1–20. [Google Scholar]
- Pasqualetto Cassinis, L.; Fonod, R.; Gill, E. Review of the robustness and applicability of monocular pose estimation systems for relative navigation with an uncooperative spacecraft. Prog. Aerosp. Sci. 2019, 110, 100548. [Google Scholar] [CrossRef]
- Chen, B.; Cao, J.; Parra, A.; Chin, T. Satellite Pose Estimation with Deep Landmark Regression and Nonlinear Pose Refinement. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Korea, 27–28 October 2019; pp. 2816–2824. [Google Scholar] [CrossRef]
- Proença, P.F.; Gao, Y. Deep Learning for Spacecraft Pose Estimation from Photorealistic Rendering. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 30–31 May 2020; pp. 6007–6013. [Google Scholar]
- Sharma, S.; D’amico, S. Pose estimation for non-cooperative spacecraft rendezvous using neural networks. Aas/Aiaa Astrodyn. Spec. Conf. 2019, 168, 3527–3546. [Google Scholar]
- Park, T.H.; Sharma, S.; D’amico, S. Towards robust learning-based pose estimation of noncooperative spacecraft. Aas/Aiaa Astrodyn. Spec. Conf. 2020, 171, 3667–3686. [Google Scholar]
- Cassinis, L.P.; Fonod, R.; Gill, E.; Ahrns, I.; Fernandez, J.G. Cnn-based pose estimation system for close-proximity operations around uncooperative spacecraft. AIAA Scitechnol. 2020 Forum 2020, 1, 1–16. [Google Scholar] [CrossRef]
- Baldini, F.; Anandkumar, A.; Murray, R.M. Learning Pose Estimation for UAV Autonomous Navigation andLanding Using Visual-Inertial Sensor Data. In Proceedings of the 2020 American Control Conference, Denver, CO, USA, 1–3 July 2020. [Google Scholar]
- Wang, S.; Clark, R.; Wen, H.; Trigoni, N. DeepVO: Towards end-to-end visual odometry with deep Recurrent Convolutional Neural Networks. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29–31 May 2017; pp. 2043–2050. [Google Scholar] [CrossRef]
- Downes, L.; Steiner, T.J.; How, J.P. Deep Learning Crater Detection for Lunar Terrain Relative Navigation. In Proceedings of the AIAA Scitech 2020 Forum, Reston, VA, USA, 6 January 2020; pp. 1–12. [Google Scholar] [CrossRef]
- Silvestrini, S.; Piccinin, M.; Zanotti, G.; Brandonisio, A.; Bloise, I.; Feruglio, L.; Lunghi, P.; Lavagna, M.; Varile, M. Optical navigation for Lunar landing based on Convolutional Neural Network crater detector. Aerosp. Sci. Technol. 2022, 123, 107503. [Google Scholar] [CrossRef]
- Silvestrini, S.; Piccinin, M.; Zanotti, G.; Brandonisio, A.; Lunghi, P.; Lavagna, M. Implicit Extended Kalman Filter for Optical Terrain Relative Navigation Using Delayed Measurements. Aerospace 2022, 9, 503. [Google Scholar] [CrossRef]
- Silburt, A.; Ali-Dib, M.; Zhu, C.; Jackson, A.; Valencia, D.; Kissin, Y.; Tamayo, D.; Menou, K. Lunar crater identification via deep learning. Icarus 2019, 317, 27–38. [Google Scholar] [CrossRef]
- Downes, L.M.; Steiner, T.J.; How, J.P. Lunar Terrain Relative Navigation Using a Convolutional Neural Network for Visual Crater Detection. In Proceedings of the 2020 American Control Conference (ACC), Denver, Co, USA, 1–3 July 2020; pp. 4448–4453. [Google Scholar] [CrossRef]
- Del Prete, R.; Saveriano, A.; Renga, A. A Deep Learning-based Crater Detector for Autonomous Vision-Based Spacecraft Navigation. In Proceedings of the 2022 IEEE 9th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 18–22 September 2022; pp. 231–236. [Google Scholar]
- Lunghi, P.; Ciarambino, M.; Lavagna, M. A multilayer perceptron hazard detector for vision-based autonomous planetary landing. Adv. Space Res. 2016, 58, 131–144. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Ciabatti, G.; Daftry, S.; Capobianco, R. Autonomous planetary landing via deep reinforcement learning and transfer learning. IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit. Work. 2021, 1, 2031–2038. [Google Scholar] [CrossRef]
- Pesce, V.; Agha-Mohammadi, A.A.; Lavagna, M. Autonomous navigation & mapping of small bodies. IEEE Aerosp. Conf. Proc. 2018, 2018, 1–10. [Google Scholar] [CrossRef]
- Piccinin, M.; Pesce, V.; Silvestrini, S.; Lavagna, M. Smart autonomous imaging plan for small bodies efficient mapping. In Proceedings of the ASTRA, Online, 11 November 2019. [Google Scholar]
- Piccinin, M.; Lunghi, P.; Lavagna, M. Deep Reinforcement Learning-based policy for autonomous imaging planning of small celestial bodies mapping. Aerosp. Sci. Technol. 2022, 120, 107224. [Google Scholar] [CrossRef]
- Chan, D.M.; Agha-Mohammadi, A.A. Autonomous Imaging and Mapping of Small Bodies Using Deep Reinforcement Learning. IEEE Aerosp. Conf. Proc. 2019, 2019, 2147. [Google Scholar] [CrossRef]
- Federici, L.; Benedikter, B.; Zavoli, A. Deep learning techniques for autonomous spacecraft guidance during proximity operations. J. Spacecr. Rocket. 2021, 58, 1–18. [Google Scholar] [CrossRef]
- Willis, S.; Izzo, D.; Hennes, D. Reinforcement learning for spacecraft maneuvering near small bodies. In Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, Napa, CA, USA, 31 January 2016; Volume 158, pp. 1351–1368. [Google Scholar]
- Li, H.; Gao, Q.; Dong, Y.; Deng, Y. Spacecraft Relative Trajectory Planning Based on Meta-Learning. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3118–3131. [Google Scholar] [CrossRef]
- Kisantal, M.; Sharma, S.; Park, T.H.; Izzo, D.; Märtens, M.; D’Amico, S. Satellite pose estimation challenge: Dataset, competition design, and results. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4083–4098. [Google Scholar] [CrossRef]
- Zwick, M.; Huertas, I.; Gerdes, L.; Ortega, G. ORGL—ESA’s Test Facility for Approach and Contact Operations in Orbital and Planetary Environments. In Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space, Shanghai, China, 21–23 October 2018; pp. 1–11. [Google Scholar]
- Krüger, H.; Theil, S. TRON—Hardware-in-the-Loop Test Facility for Lunar Descent and Landing Optical Navigation. IFAC Proceedings Volumes. In Proceedings of the 18th IFAC Symposium on Automatic Control in Aerospace, Mumbai, India, 6–10 September 2010; Volume 43, pp. 265–270. [Google Scholar] [CrossRef]
- Dubanchet, V.; Romero, J.B.; Gregertsen, K.N.; Austad, H.; Gancet, J.; Natusiewicz, K.; Vinals, J.; Guerra, G.; Rekleitis, G.; Paraskevas, I.S.; et al. Eross Project—European Autonomous Robotic Vehicle For On-Orbit Servicing; EROSS: New York, NY, USA, 2020. [Google Scholar]
- Silvestrini, S.; Lunghi, P.; Piccinin, M.; Zanotti, G.; Brandonisio, A.; Lavagna, M. Experimental Validation of Synthetic Training Set for Deep Learning Vision-Based Navigation Systems for Lunar Landing. In Proceedings of the 71st International Astronautical Congress (IAC 2021), Dubai, United Arab Emirates, 25–29 October 2020; pp. 1–11. [Google Scholar]
- Piccinin, M.; Silvestrini, S.; Zanotti, G.; Brandonisio, A.; Lunghi, P.; Lavagna, M. ARGOS: Calibrated facility for Image based Relative Navigation technologies on ground verification and testing. In Proceedings of the 72nd International Astronautical Congress (IAC 2021), Dubai, United Arab Emirates, 25–29 October 2021; pp. 1–11. [Google Scholar]
- Michele, B.; Paolo, L.; Michèle, L. Tango Spacecraft Dataset for Region of Interest Estimation and Semantic Segmentation; Springer: Amsterdam, The Netherlands, 2022. [Google Scholar] [CrossRef]
- Bechini, M.; Lunghi, P.; Lavagna, M. Tango Spacecraft Wireframe Dataset Model for Line Segments Detection; Springer: Amsterdam, The Netherlands, 2022. [Google Scholar] [CrossRef]
- Bechini, M.; Lunghi, P.; Lavagna, M. Spacecraft Pose Estimation via Monocular Image Processing: Dataset Generation and Validation. In Proceedings of the 9th European Conference for Aeronautics and Aerospace Sciences, Lille, France, 27 July–1 August 2022. [Google Scholar]



















| Ref. | Highlights | This Review |
|---|---|---|
| [6] | The survey focuses on machine learning techniques in spacecraft control design. | This paper extends the review to navigation and estimation in space. |
| [7] | The survey is limited to the relative navigation task using deep learning | This paper extends the review to online estimation, AI-aided filtering and machine learning spacecraft control. |
| [8] | The survey thoroughly reviews multiple applications of machine learning techniques, particularly focusing on FDIR. Moreover, it reports a review of the most common Edge AI boards applicable to space-based systems. | This paper focuses on GNC applications, yielding also a mathematical tutorial for the development of some of the presented applications. |
| [9] | The survey thoroughly reviews end-to-end guidance and control applications based on AI. | This paper entails a significant discussion on the hybrid techniques that incorporate traditional algorithms to AI-based approaches. |
| [10] | The survey thoroughly reviews deep learning methods for unmanned aerial vehicles. | This paper focuses on GNC and estimation for space-based systems. |
| [12] | The survey focuses on reinforcement learning applications for spacecraft control | This paper extends the discussion to spacecraft navigation and estimation, together with tutorial-like analysis of common artificial neural network architectures. |
| Learning Approach | Features | Task | Algorithms |
|---|---|---|---|
| Supervised Learning | It learns by exploiting input–output data pairs | Classification | Support Vector Machines, Discriminant Analysis, Nearest Neighbour, Artificial Neural Networks |
| Regression | Linear regression, Ensemble methods, Decision Trees, Support Vector Regression, Artificial Neural Networks | ||
| Unsupervised Learning | It learns to extrapolate patterns and properties of the structure of the dataset | Clustering | K-means, Spectral clustering, Hierarchical clustering, Gaussian Mixture, Hidden Markov Models, Artificial Neural Networks |
| Dimensionality Reduction | Principal Component Analysis, Linear Discriminant Analysis, Artificial Neural Networks | ||
| Reinforcement Learning | It learns the action to undertake based on some inputs, in order to maximize a given reward. | Model-based | Dynamica Programming, Model-given methods, Model-learned methods |
| Model-free | Value based methods, Policy-based methods |
| Activation Function | Codomain | Ref. | ||
|---|---|---|---|---|
| Hyperbolic Tangent | (−1, 1) | [27,34] | ||
| Sigmoid | (0, 1) | [34,35] | ||
| ReLu | [0, ∞) | [27,36,37] | ||
| Signum | sgn(x) | [−1, 1] | ||
| Heaviside step | [0, 1] | [38] | ||
| Softmax | (0, 1) | output |
| Network Type | Architecture | Training | Algorithm | Space Applications |
|---|---|---|---|---|
| Feedforward | MLP | S/R | Backpropagation | Dynamics approximation, value function approximation |
| RBFNN | S/U/R | Backpropagation/ Lyapunov/K-means clustering | Dynamics approximation, regression, time-series prediction | |
| AE | U | Backpropagation | Dimensionality reduction, state-space modelling, data encoding, anomaly detection | |
| CNN | S | Backpropagation | Feature detection, image classification, vision-based navigation | |
| Recurrent | LRNN | S/R | Backpropagation through time | Dynamics approximation, time-series prediction |
| NARX | S/R | Backpropagation through time | Dynamics approximation, time-series prediction | |
| HNN | S | Backpropagation through time | Combinatorial optimization, system identification | |
| LSTM | S/R | Backpropagation through time | Time-series prediction, dynamics approximation | |
| GRU | S/R | Backpropagation through time | Time-series prediction, dynamics approximation, anomaly detection |
| Application | Type of ANN | Accuracy | Learning Time | Ref. |
|---|---|---|---|---|
| Fully-Neural | MLP | Low | Fast | [27,55] |
| LRNN | High | Slow | [27] | |
| Dynamics Learning | NARX | High | Slow | [27,56,57] |
| AE | Medium | Fast | [40,58] |
| Application | Type of ANN | Accuracy | Learning Time | Ref. |
|---|---|---|---|---|
| Uncertainties and disturbance estimation | MLP | Medium | Medium | [34,35,38,59] |
| RBFNN | High | Fast | [29,30,60] |
| Application | Type of ANN | Accuracy | Learning Time | Ref. |
|---|---|---|---|---|
| System Identification | MLP | High | - | [36,37,62,63] |
| HNN | High | Fast | [44,45,61] |
| Application | Type | Accuracy | Training Needs | Robustness | Adaptability |
|---|---|---|---|---|---|
| Optical Navigation | CNN + IP | High | Medium | High | Medium |
| CNN + LSTM | Medium | High | High | High |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silvestrini, S.; Lavagna, M. Deep Learning and Artificial Neural Networks for Spacecraft Dynamics, Navigation and Control. Drones 2022, 6, 270. https://doi.org/10.3390/drones6100270
Silvestrini S, Lavagna M. Deep Learning and Artificial Neural Networks for Spacecraft Dynamics, Navigation and Control. Drones. 2022; 6(10):270. https://doi.org/10.3390/drones6100270
Chicago/Turabian StyleSilvestrini, Stefano, and Michèle Lavagna. 2022. "Deep Learning and Artificial Neural Networks for Spacecraft Dynamics, Navigation and Control" Drones 6, no. 10: 270. https://doi.org/10.3390/drones6100270
APA StyleSilvestrini, S., & Lavagna, M. (2022). Deep Learning and Artificial Neural Networks for Spacecraft Dynamics, Navigation and Control. Drones, 6(10), 270. https://doi.org/10.3390/drones6100270