
Pathways to Unsegregated Sharing of Airspace: Views of the Uncrewed Aerial Vehicle (UAV) Industry

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
1.1. Current Impacts of Drones
1.2. Drone Industry Attitudes to Shared Airspace
1.3. Class Lima Shared Airspace Concept
2. Materials and Methods
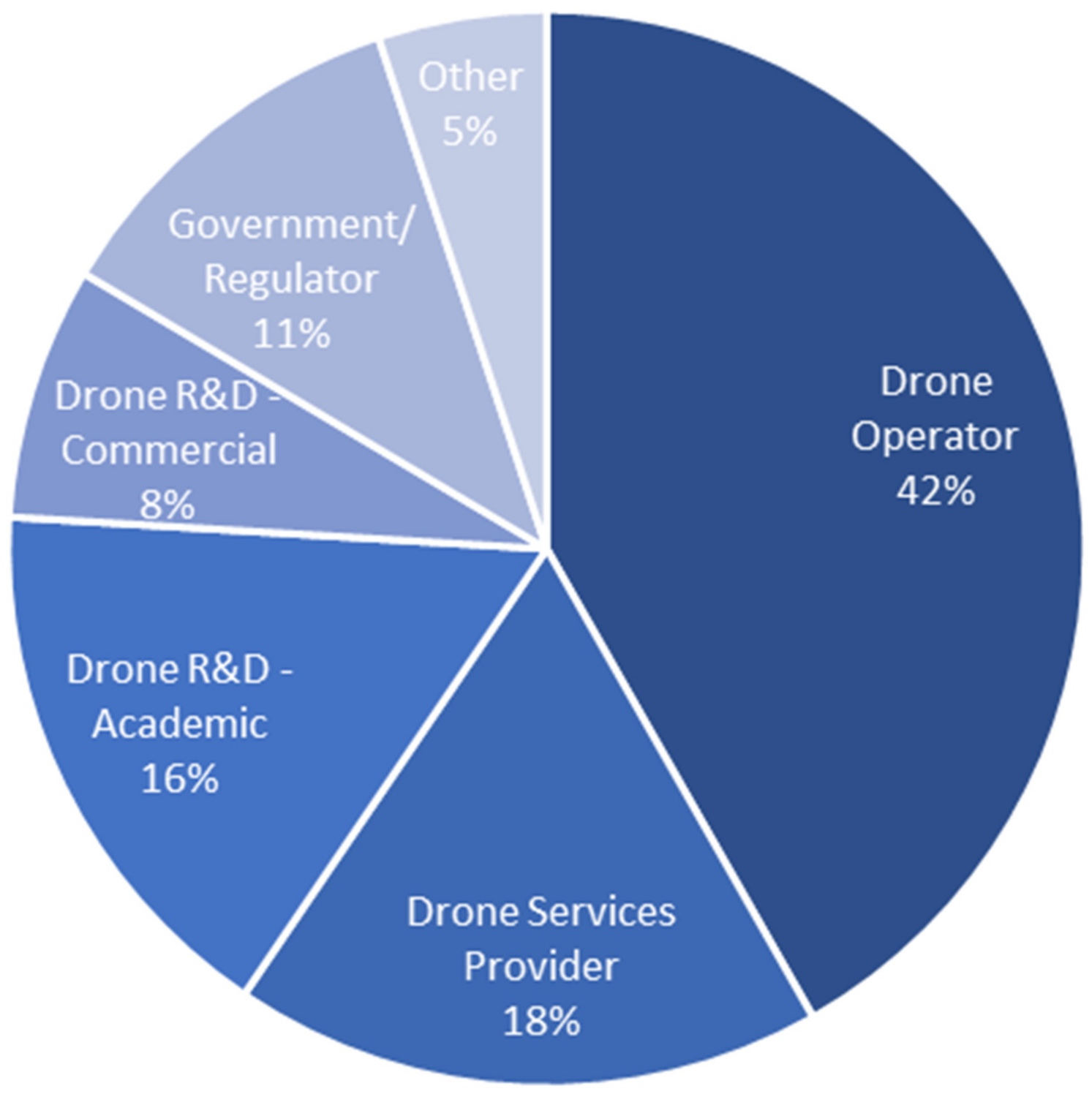
2.1. Participant Recruitment
2.2. Workshop Format
2.3. Analysis
3. Results and Discussion
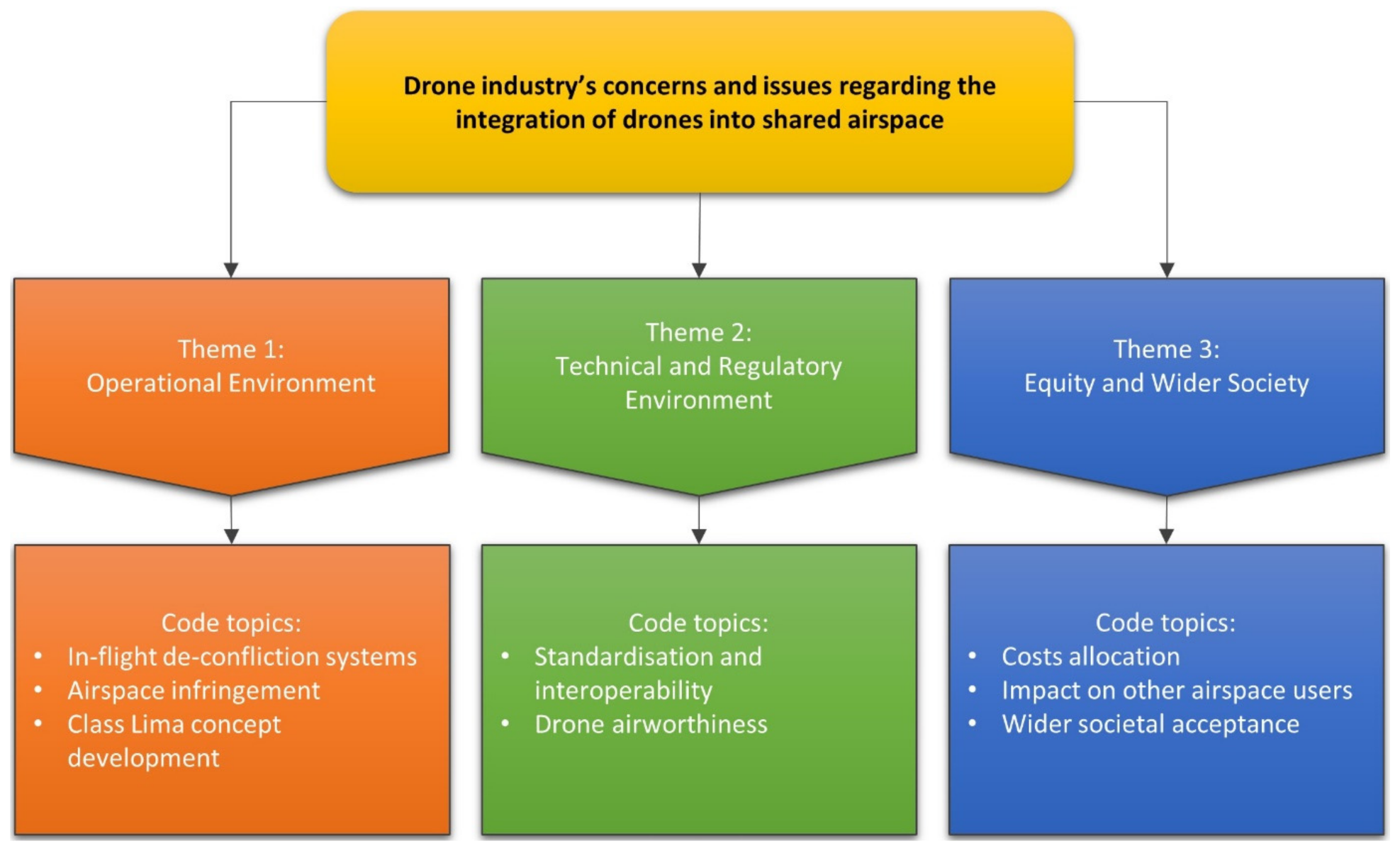
3.1. Code Topics and Predominant Themes
3.2. Theme 1: Operational Environment
3.2.1. In-Flight De-Confliction Systems
3.2.2. Airspace Infringement
3.2.3. Class Lima Concept Development
3.3. Theme 2: Technical and Regulatory Environment
3.3.1. Standardisation and Interoperability
3.3.2. Drone Airworthiness
3.4. Theme 3: Equity and Wider Society
3.4.1. Costs Allocation
3.4.2. Impact on Other Airspace Users
3.4.3. Wider Societal Acceptance
3.5. Numbers of Endorsing Comments from Participants
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rana, K.; Praharaj, S.; Nanda, T. Unmanned Aerial Vehicles (UAVs): An Emerging Technology for Logistics. Int. J. Bus. Manag. Invent. 2016, 5, 86–92. [Google Scholar]
- Scott, J.E.; Scott, C.H. Drone Delivery Models for Healthcare. In Proceedings of the 50th Hawaii International Conference on System Sciences (HICSS), Waikoloa, HI, USA, 4–7 January 2017. [Google Scholar]
- Darvishpoor, S.; Roshanian, J.; Raissi, A.; Hassanalian, M. Configurations, flight mechanisms, and applications of unmanned aerial systems: A review. Prog. Aerosp. Sci. 2020, 121, 100694. [Google Scholar] [CrossRef]
- Grote, M.; Cherrett, T.; Oakey, A.; Royall, P.G.; Whalley, S.; Dickinson, J. How Do Dangerous Goods Regulations Apply to Uncrewed Aerial Vehicles Transporting Medical Cargos? Drones 2021, 5, 38. [Google Scholar] [CrossRef]
- Lin, C.A.; Shah, K.; Mauntel, L.C.C.; Shah, S.A. Drone delivery of medications: Review of the landscape and legal considerations. Am. J. Health Syst. Pharm. 2018, 75, 153–158. [Google Scholar] [CrossRef] [PubMed]
- Goodchild, A.; Toy, J. Delivery by drone: An evaluation of unmanned aerial vehicle technology in reducing CO2 emissions in the delivery service industry. Transp. Res. Part D Transp. Environ. 2018, 61, 58–67. [Google Scholar] [CrossRef]
- Aurambout, J.-P.; Gkoumas, K.; Ciuffo, B. Last mile delivery by drones: An estimation of viable market potential and access to citizens across European cities. Eur. Transp. Res. Rev. 2019, 11, 30. [Google Scholar] [CrossRef] [Green Version]
- Sah, B.; Gupta, R.; Bani-Hani, D. Analysis of barriers to implement drone logistics. Int. J. Logist. Res. Appl. 2020, 24, 1–20. [Google Scholar] [CrossRef]
- Alarcón, V.; García, M.; Alarcón, F.; Viguria, A.; Martínez, Á.; Janisch, D.; Acevedo, J.J.; Maza, I.; Ollero, A. Procedures for the Integration of Drones into the Airspace Based on U-Space Services. Aerospace 2020, 7, 128. [Google Scholar] [CrossRef]
- Hatfield, M.; Cahill, C.; Webley, P.; Garron, J.; Beltran, R. Integration of Unmanned Aircraft Systems into the National Airspace System-Efforts by the University of Alaska to Support the FAA/NASA UAS Traffic Management Program. Remote Sens. 2020, 12, 3112. [Google Scholar] [CrossRef]
- Merkert, R.; Bushell, J. Managing the drone revolution: A systematic literature review into the current use of airborne drones and future strategic directions for their effective control. J. Air. Transp. Manag. 2020, 89, 101929. [Google Scholar] [CrossRef] [PubMed]
- Capitán, C.; Pérez-León, H.; Capitán, J.; Castaño, Á.; Ollero, A. Unmanned Aerial Traffic Management System Architecture for U-Space In-Flight Services. Appl. Sci. 2021, 11, 3995. [Google Scholar] [CrossRef]
- Jelev, N. European Network of U-Space Demonstrators—Lessons Learned from the Isles of Scilly (UK) BVLOS Airbridge; Eurocontrol: Brussels, Belgium, 2021. [Google Scholar]
- Civil Aviation Authority (CAA). Unmanned Aircraft System Operations in UK Airspace—Guidance (CAP 722); Civil Aviation Authority: Crawley, UK, 2020. [Google Scholar]
- International Civil Aviation Organization (ICAO). Annex 11 to the Convention on International Civil Aviation—Air Traffic Services, 15th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2018. [Google Scholar]
- NATS. Introduction to Airspace. Available online: https://www.nats.aero/ae-home/introduction-to-airspace/ (accessed on 19 May 2021).
- International Civil Aviation Organization (ICAO). Unmanned Aircraft Systems Traffic Management (UTM)—A Common Framework with Core Principles for Global Harmonization; International Civil Aviation Organization: Montreal, QC, Canada, 2020. [Google Scholar]
- Civil Aviation Authority (CAA). A Unified Approach to the Introduction of UAS Traffic Management (CAP 1868); Civil Aviation Authority: Crawley, UK, 2019. [Google Scholar]
- McCarthy, T.; Pforte, L.; Burke, R. Fundamental Elements of an Urban UTM. Aerospace 2020, 7, 85. [Google Scholar] [CrossRef]
- Guan, X.; Lyu, R.; Shi, H.; Chen, J. A survey of safety separation management and collision avoidance approaches of civil UAS operating in integration national airspace system. Chin. J. Aeronaut. 2020, 33, 2851–2863. [Google Scholar] [CrossRef]
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-Space Concept of Operations: A Key Enabler for Opening Airspace to Emerging Low-Altitude Operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Cai, K.; Zhu, Y. Civil unmanned aircraft system operation in national airspace: A survey from Air Navigation Service Provider perspective. Chin. J. Aeronaut. 2021, 34, 200–224. [Google Scholar] [CrossRef]
- Civil Aviation Authority (CAA). Radio and Transponder Mandatory Zones—Consultation on Revised SARG Airspace Policy Statement; Civil Aviation Authority: Crawley, UK, 2020. [Google Scholar]
- SkyDemon. Welcome to SkyDemon. Available online: https://www.skydemon.aero/ (accessed on 15 July 2021).
- Braun, V.; Clarke, V. Using thematic analysis in psychology. Qual. Res. Psychol. 2006, 3, 77–101. [Google Scholar] [CrossRef] [Green Version]
- Fereday, J.; Muir-Cochrane, E. Demonstrating Rigor Using Thematic Analysis: A Hybrid Approach of Inductive and Deductive Coding and Theme Development. Int. J. Qual. Methods 2006, 5, 80–92. [Google Scholar] [CrossRef]
- Grote, M.; Waterson, B.; Rudolph, F. The impact of strategic transport policies on future urban traffic management systems. Transp. Policy 2021, 110, 402–414. [Google Scholar] [CrossRef]
- Frith, H.; Gleeson, K. Clothing and Embodiment: Men Managing Body Image and Appearance. Psychol. Men Masculinities 2004, 5, 40–48. [Google Scholar] [CrossRef]
- Clothier, R.A.; Williams, B.P.; Cox, K.; Hegarty-Cremer, S. Human See and Avoid Performance and its Suitability as a Basis for Requirements for UAS Detect and Avoid Systems. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Civil Aviation Authority (CAA). Airspace Infringements: Review and actions Process (CAP 1404); Civil Aviation Authority: Crawley, UK, 2021. [Google Scholar]
- Xu, C.; Liao, X.; Tan, J.; Ye, H.; Lu, H. Recent Research Progress of Unmanned Aerial Vehicle Regulation Policies and Technologies in Urban Low Altitude. IEEE Access 2020, 8, 74175–74194. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Feature |
|---|
| Designated zone in appropriate locations (i.e., low population and air traffic densities). |
| Guaranteed Secondary Surveillance Radar (SSR) transponder 1 reception coverage within the zone (although carriage of a SSR transponder is not a Class Lima entry requirement). |
| Low latency and free promulgation of drone flight plans, along with ‘live’ drone traffic status updates. These would be accessible to all airspace users via various connected apps such as SkyDemon [24] or similar. |
| Assurance that drone operators would track crewed traffic within the zone to ensure separation was maintained. |
| Requirement for drones to be capable of automatically avoiding any other electronic conspicuity (EC) sources in the zone, where EC is an umbrella term for devices fitted to aircraft that allow airspace users to be detected electronically. This provides an additional safety layer should drone command links fail. |
| No additional costs and/or complex procedures involved for crewed air traffic, except for the costs associated with fitting EC equipment, with some NAAs even offering financial incentives to encourage EC uptake (e.g., the UK Civil Aviation Authority (CAA) is currently offering a 50% rebate, up to a maximum of £250, on the cost of EC equipment). |
| Drones operating within the zone would be capable of automatically broadcasting regular position reports on a designated VHF frequency (VHF-Out). This would provide a further safety level, enabling crewed aircraft to maintain situational awareness that allows intervention should primary separation systems fail. |
| No requirement for an air navigation service provider (ANSP) because this would be unnecessary, costly, and technically challenging in remote regions. |
| Participants’ Comments |
|---|
3.2.1. In-Flight De-Confliction Systems:
|
3.2.2. Airspace Infringement:
|
3.2.3. Class Lima Concept Development:
|
| Participants’ Comments |
|---|
3.3.1. Standardisation and Interoperability:
|
3.3.2. Drone Airworthiness:
|
| Participants’ Comments |
|---|
3.4.1. Costs Allocation:
|
3.4.2. Impact on Other Airspace Users:
|
3.4.3. Wider Societal Acceptance:
|
| Topic | General Outcome/Criticality of Issues | Number of Endorsing Comments 1 |
|---|---|---|
| 3.2.1. In-Flight De-Confliction Systems | DAA systems are necessary, based on onboard EC devices. | 63 |
| ADS-B is the foremost EC technology. | 17 | |
| EO sensors or FPV cameras are suitable in isolation for DAA systems (see ‘Drone Airworthiness’ topic rows for suitability as back-ups). | 3 | |
| VHF-Out is not viable for de-confliction. | 7 | |
| 3.2.2. Airspace Infringement | Minimising risk of collisions with interlopers is challenging, despite preventative measures. | 8 |
| 3.2.3. Class Lima Concept Development | There is a need to quantify/compare risks associated with different solutions to the use of airspace by drones. | 6 |
| Class Lima is lower risk because TDAs are temporary meaning inadvertent infringements are more likely due to lack of awareness. | 4 | |
| Class Lima is higher risk because permanency increases exposure to infringements compared to time limited TDAs. | 2 | |
| Class Lima should be restricted to low level airspace. | 4 | |
| Class Lima should have a defined maximum traffic density limit above which UTM is more appropriate. | 4 | |
| Class Lima should be developed in countries with more permissible airspace rules/structures. | 4 | |
| 3.3.1. Standardisation and Interoperability | Regulators should adopt standardised, interoperable formats, particularly for EC equipment. | 14 |
| Regulators should mandate the carriage of EC equipment for entry to shared airspace. | 21 | |
| Specification of minimum equipment to enter shared airspace will be required. | 2 | |
| 3.3.2. Drone Airworthiness | Failover is required for in-flight de-confliction systems. | 24 |
| EO sensors/FPV cameras/VHF-Out could serve as back-ups for EC-based DAA systems. | 18 | |
| CAA approval process for drone airworthiness takes too long at present. | 2 | |
| 3.4.1. Costs Allocation | Other airspace users will be resistant to costs incurred due to using shared airspace. | 8 |
| Drone industry should bear part/all of the costs incurred by all parties intending to use shared airspace. | 2 | |
| 3.4.2. Impact on Other Airspace Users | Shared airspace needs to be supported by the wider aviation community. | 24 |
| Requirement to fit EC equipment is a barrier to widespread support for shared airspace. | 6 | |
| 3.4.3. Wider Societal Acceptance | Demonstrating to the public that shared airspace is low risk is important. | 5 |
| Societal benefits of shared airspace enabling drone operations should be emphasised. | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grote, M.; Pilko, A.; Scanlan, J.; Cherrett, T.; Dickinson, J.; Smith, A.; Oakey, A.; Marsden, G. Pathways to Unsegregated Sharing of Airspace: Views of the Uncrewed Aerial Vehicle (UAV) Industry. Drones 2021, 5, 150. https://doi.org/10.3390/drones5040150
Grote M, Pilko A, Scanlan J, Cherrett T, Dickinson J, Smith A, Oakey A, Marsden G. Pathways to Unsegregated Sharing of Airspace: Views of the Uncrewed Aerial Vehicle (UAV) Industry. Drones. 2021; 5(4):150. https://doi.org/10.3390/drones5040150
Chicago/Turabian StyleGrote, Matt, Aliaksei Pilko, James Scanlan, Tom Cherrett, Janet Dickinson, Angela Smith, Andy Oakey, and Greg Marsden. 2021. "Pathways to Unsegregated Sharing of Airspace: Views of the Uncrewed Aerial Vehicle (UAV) Industry" Drones 5, no. 4: 150. https://doi.org/10.3390/drones5040150
APA StyleGrote, M., Pilko, A., Scanlan, J., Cherrett, T., Dickinson, J., Smith, A., Oakey, A., & Marsden, G. (2021). Pathways to Unsegregated Sharing of Airspace: Views of the Uncrewed Aerial Vehicle (UAV) Industry. Drones, 5(4), 150. https://doi.org/10.3390/drones5040150