
Application of Fixed-Wing UAV-Based Photogrammetry Data for Snow Depth Mapping in Alpine Conditions


Abstract
:1. Introduction
2. Materials and Methods
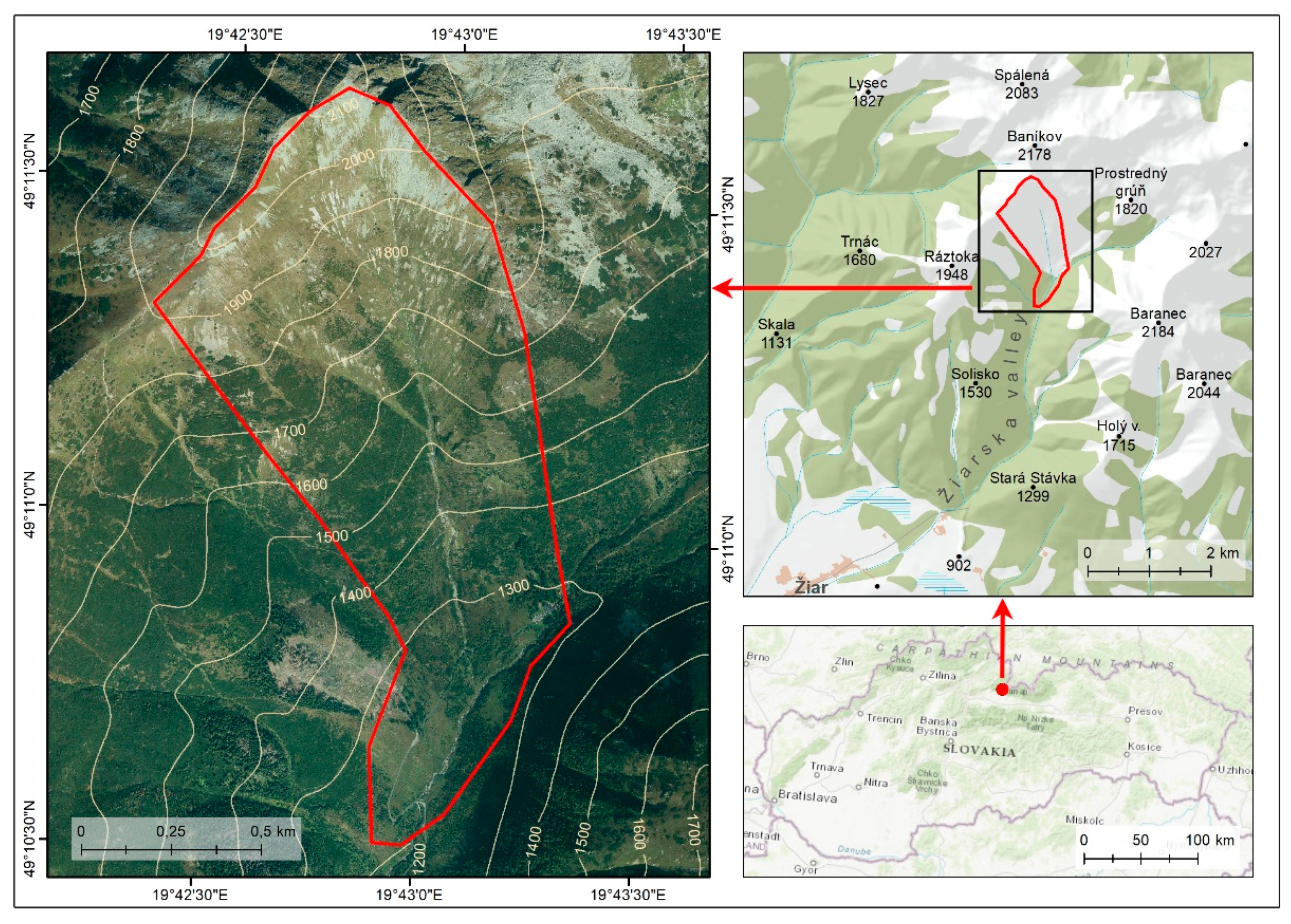
2.1. Study Area
2.2. Acquisition of Photogrammetric Data
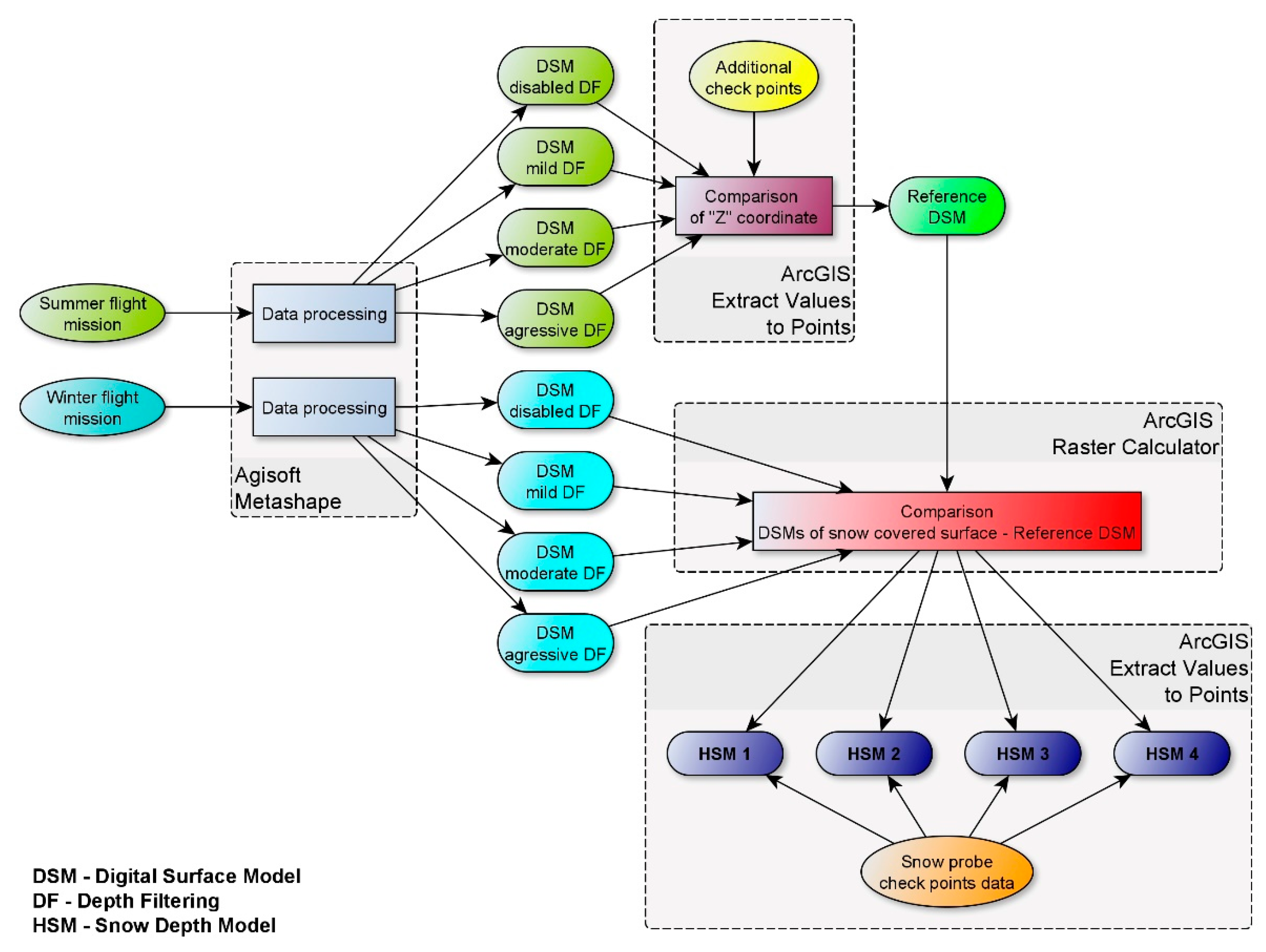
2.3. Processing of Photogrametric Data and DSM Analysing
3. Results and Discussion
3.1. DSM from the Summer Flight Mission and Selection of Reference DSM
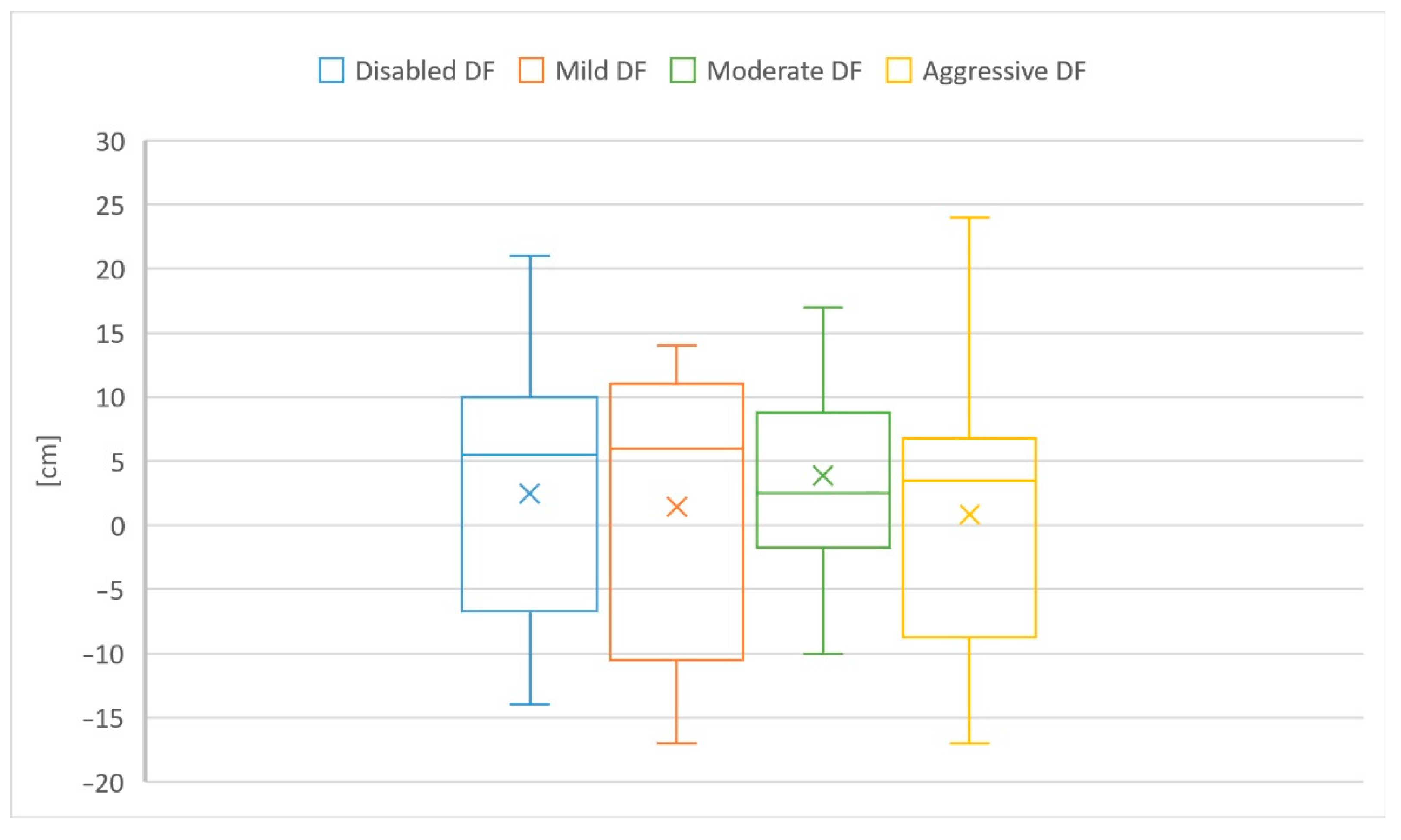
3.2. DSMs from the Winter Flight Mission
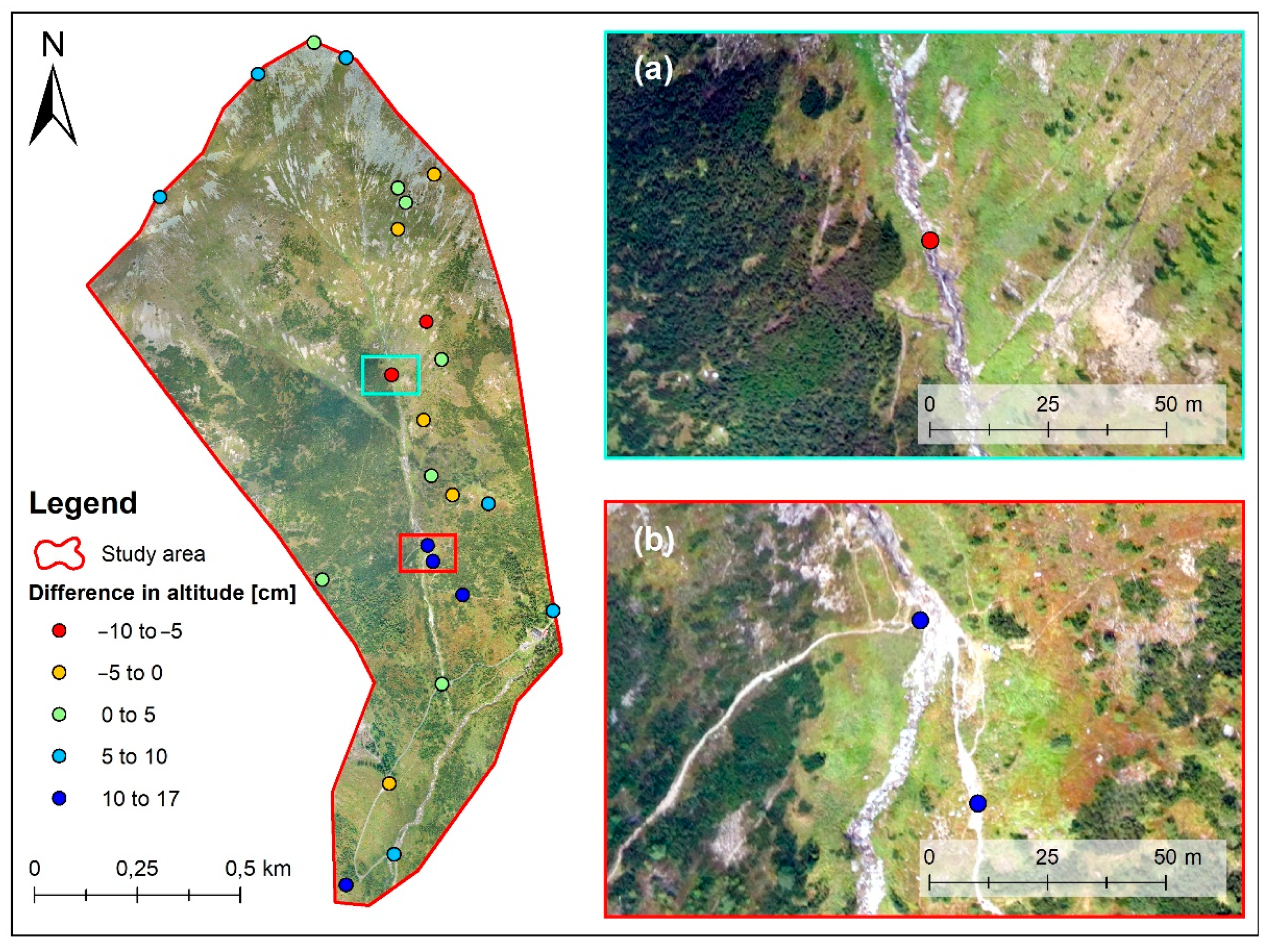
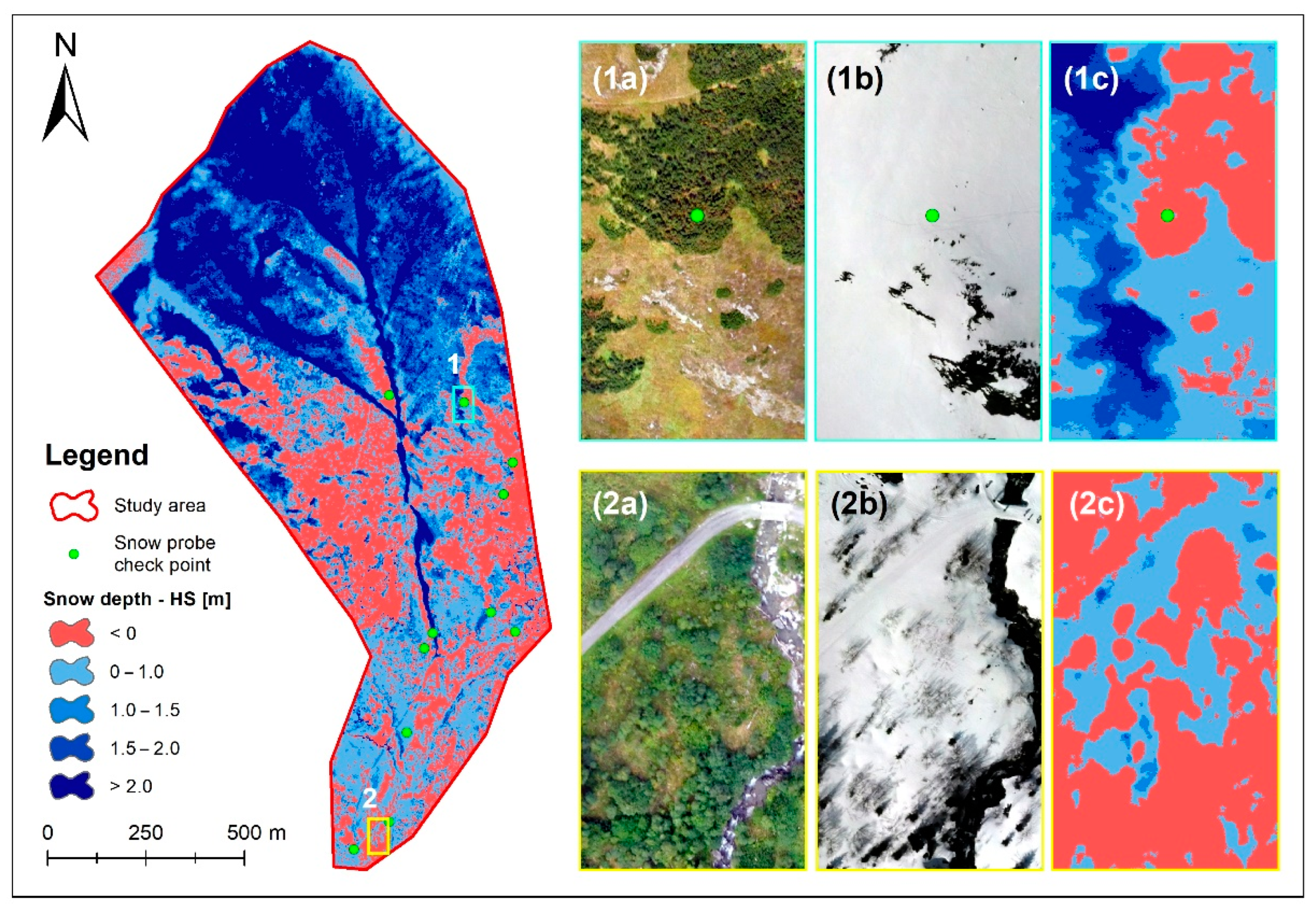
3.3. Snow Depth Models
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- López-Moreno, J.I.; Fassnacht, S.R.; Heath, J.T.; Musselman, K.N.; Revuelto, J.; Latron, J.; Morán-Tejeda, E.; Jonas, T. Small scale spatial variability of snow density and depth over complex alpine terrain: Implications for estimating snow water equivalent. Adv. Water Resour. 2013, 55, 40–52. [Google Scholar] [CrossRef] [Green Version]
- Cimoli, E.; Marcer, M.; Vandecrux, B.; Bøggild, C.E.; Williams, G.; Simonsen, S.B. Application of Low-Cost UASs and Digital Photogrammetry for High-Resolution Snow Depth Mapping in the Arctic. Remote Sens. 2017, 9, 1144. [Google Scholar] [CrossRef] [Green Version]
- Mahomendaza, A.B.; Varade, D.; Shimada, S. Estimation of Snow Depth in the Hindu Kush Himalayas of Afghanistan during Peak Winter and Early Melt Season. Remote Sens. 2020, 12, 2788. [Google Scholar] [CrossRef]
- Callaghan, T.V.; Johansson, M.; Brown, R.D.; Groisman, P.Y.; Labba, N.; Radionov, V.; Bradley, R.S.; Blangy, S.; Bulygina, O.N.; Christensen, T.R.; et al. Multiple Effects of Changes in Arctic Snow Cover. Ambio 2011, 40, 32–45. [Google Scholar] [CrossRef] [Green Version]
- Maurer, G.E.; Bowling, D.R. Seasonal snowpack characteristics influence soil temperature and water content at multiple scales in interior western us mountain ecosystems. Water Resour. Res. 2014, 50, 5216–5234. [Google Scholar] [CrossRef]
- Mankin, J.S.; Viviroli, D.; Singh, D.; Hoekstra, A.Y.; Diffenbaugh, N.S. The potential for snow to supply human water demand in the present and future. Environ. Res. Lett. 2015, 10, 114016. [Google Scholar] [CrossRef]
- Bokhorst, S.; Pedersen, S.H.; Brucker, L.; Anisimov, O.; Bjerke, J.W.; Brown, R.D.; Ehrich, D.; Essery, R.L.H.; Heilig, A.; Ingvander, S.; et al. Changing Arctic snow cover: A review of recent developments and assessment of future needs for observations, modelling, and impacts. Ambio 2016, 45, 516–537. [Google Scholar] [CrossRef] [Green Version]
- Safarianzengir, V.; Mahmoudi, L.; Meresht, R.M.; Abad, B.; Rajabi, K.; Kiannian, M. Monitoring and Analysis of Changes in the Depth and Surface Area Snow of the Mountains in Iran Using Remote Sensing Data. J. Indian Soc. Remote Sens. 2020, 48, 1479–1494. [Google Scholar] [CrossRef]
- Fierz, C.; Armstrong, R.L.; Durand, Y.; Etchevers, P.; Green, E.; McClung, D.M.; Nishimura, K.; Satyawali, P.K.; Sokratov, S.A. The International Classification for Seasonal Snow on the Ground. IHP-VII Tech. Doc. Hydrol. 2009, 83, 25161535. [Google Scholar]
- Anderson, B.T.; McNamara, J.P.; Marshall, H.-P.; Flores, A.N. Insights into the physical processes controlling correlations between snow distribution and terrain properties. Water. Resour. Res. 2014, 50, 4545–4563. [Google Scholar] [CrossRef]
- Kinar, N.J.; Pomeroy, J.W. Reviews of Geophysics Measurement of the physical properties of the snowpack. Rev. Geophys. 2015, 53, 481–544. [Google Scholar] [CrossRef]
- Bühler, Y.; Adams, M.S.; Bösch, R.; Stoffel, A. Mapping snow depth in alpine terrain with unmanned aerial systems (UASs): Potential and limitations. Cryosphere 2016, 10, 1075–1088. [Google Scholar] [CrossRef] [Green Version]
- Goetz, J.; Marcer, M.; Brenning, A.; Bodin, X. UAV imagery and in-situ measurements for structure-from-motion snow depth mapping over the Laurichard rock glacier, France—Surveyed in 2017. Mendeley Data V2 2019. [Google Scholar] [CrossRef]
- Broxton, P.D.; Harpold, A.A.; Biederman, J.A.; Troch, P.A.; Molotch, N.P.; Brooks, P.D. Quantifying the effects of vegetation structure on snow accumulation and ablation in mixed-conifer forests. Ecohydrology 2015, 8, 1073–1094. [Google Scholar] [CrossRef]
- Currier, W.R.; Lundquist, J.D. Snow depth variability at the forest edge in multiple climates in the Western United States. Water Resour. Res. 2018, 54, 8756–8773. [Google Scholar] [CrossRef]
- Cartwright, K.; Hopkinson, C.; Kienzle, S.; Rood, S.B. Evaluation of temporal consistency of snow depth drivers of a Rocky Mountain watershed in southern Alberta. Hydrol. Process. 2020, 34, 4996–5012. [Google Scholar] [CrossRef]
- Hartzell, P.J.; Gadomski, P.J.; Glennie, C.L.; Finnegan, D.C.; Deems, J.S. Rigorous error propagation for terrestrial laser scanning with application to snow volume uncertainty. J. Glaciol. 2015, 61, 1147–1158. [Google Scholar] [CrossRef] [Green Version]
- Revuelto, J.; Vionnet, V.; López-Moreno, J.I.; Lafaysse, M.; Morin, S. Combining snowpack modeling and terrestrial laser scanner observations improves the simulation of small scale snow dynamics. J. Hydrol. 2016, 291–307. [Google Scholar] [CrossRef]
- Fey, C.; Schattan, P.; Helfricht, K.; Schöber, J. A compilation of Multitemporal TLS Snow Depth Distribution Maps at the Weisssee Snow Research Site (Kaunertal, Austria). Water Resour. Res. 2019, 55, 5154–5164. [Google Scholar] [CrossRef]
- Shaw, T.E.; Deschamps-Berger, C.; Gascoin, S.; McPhee, J. Monitoring Spatial and Temporal Differences in Andean Snow Depth Derived from Satellite Tri-Stereo Photogrammetry. Front. Earth Sci. 2020, 8, 579142. [Google Scholar] [CrossRef]
- Deschamps-Berger, C.; Gascoin, S.; Berthier, E.; Deems, J.; Gutmann, E.; Dehecq, A.; Shean, D.; Dumont, M. Snow depth mapping from stereo satellite imagery in mountainous terrain: Evaluation using airborne laser-scanning data. Cryosphere 2020, 14, 2925–2940. [Google Scholar] [CrossRef]
- Revuelto, J.; Lecourt, G.; Lafaysse, M.; Zin, I.; Charrois, L.; Vionnet, V.; Dumont, M.; Rabatel, A.; Six, D.; Condom, T.; et al. Multi-Criteria Evaluation of Snowpack Simulations in Complex Alpine Terrain Using Satellite and In Situ Observations. Remote Sens. 2018, 10, 1171. [Google Scholar] [CrossRef] [Green Version]
- Deems, J.; Painter, T.; Finnegan, D. Lidar measurement of snow depth: A review. J. Glaciol. 2013, 59, 467–479. [Google Scholar] [CrossRef] [Green Version]
- Polat, N.; Uysal, M. An Experimental Analysis of Digital Elevation Models Generated with Lidar Data and UAV Photogrammetry. J. Indian Soc. Remote Sens. 2018, 46, 1135–1142. [Google Scholar] [CrossRef]
- Redpath, T.A.N.; Sirguey, P.; Cullen, N.J. Repeat mapping of snow depth across an alpine catchment with RPAS photogrammetry. Cryosphere 2018, 12, 3477–3497. [Google Scholar] [CrossRef] [Green Version]
- Gaffey, C.; Bhardwaj, A. Applications of Unmanned Aerial Vehicles in Cryosphere: Latest Advances and Prospects. Remote Sens. 2020, 12, 948. [Google Scholar] [CrossRef] [Green Version]
- Casella, V.; Chiabrando, F.; Franzini, M.; Manzino, A.M. Accuracy Assessment of a UAV Block by Different Software Packages, Processing Schemes and Validation Strategies. ISPRS Int. J. Geo-Inf. 2020, 9, 164. [Google Scholar] [CrossRef] [Green Version]
- Lendzioch, T.; Langhammer, J.; Jenicek, M. Tracking forest and open area effects on snow accumulation by unmanned aerial vehicle photogrammetry. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences: XLIB1 XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016. [Google Scholar]
- Avanzi, F.; Bianchi, A.; Cina, A.; De Michele, C.; Maschio, P.; Pagliari, D.; Passoni, D.; Pinto, L.; Piras, M.; Rossi, L. Centimetric accuracy in snow depth using unmanned aerial system photogrammetry and a multistation. Remote Sens. 2018, 10, 765. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, R.; Prevost, C.; Canisius, F.; Leblanc, S.G.; Maloley, M.; Oakes, S.; Holman, K.; Knudby, A. Monitoring snow depth change across a range of landscapes with ephemeral snowpacks using structure from motion applied to lightweight unmanned aerial vehicle videos. Cryosphere 2018, 12, 3535–3550. [Google Scholar] [CrossRef] [Green Version]
- Mathews, A.; Jensen, J. Visualizing and Quantifying Vineyard Canopy LAI Using an Unmanned Aerial Vehicle (UAV) Collected High Density Structure from Motion Point Cloud. Remote Sens. 2013, 5, 2164–2183. [Google Scholar] [CrossRef] [Green Version]
- Fleming, Z.; Pavlis, T. An orientation based correction method for SfM-MVS point clouds—Implications for field geology. J. Struct. Geol. 2018, 113, 76–89. [Google Scholar] [CrossRef]
- Bistacchi, A.; Balsamo, F.; Storti, F.; Mozafari, M.; Swennen, R.; Solum, J.; Tueckmantel, C.; Taberner, C. Photogrammetric digital outcrop reconstruction, visualization with textured surfaces, and three-dimensional structural analysis and modeling: Innovative methodologies applied to fault-related dolomitization (Vajont Limestone, Southern Alps, Italy). Geosphere 2015, 11, 2031–2048. [Google Scholar] [CrossRef]
- Tavani, S.; Corradetti, A.; Billi, A. High precision analysis of an embryonic extensional fault-related fold using 3D orthorectified virtual outcrops: The viewpoint importance in structural geology. J. Struct. Geol. 2016, 86, 200–210. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion′ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Kovanič, Ľ.; Blistan, P.; Urban, R.; Štroner, M.; Blišťanová, M.; Bartoš, K.; Pukanská, K. Analysis of the Suitability of High-Resolution DEM Obtained Using ALS and UAS (SfM) for the Identification of Changes and Monitoring the Development of Selected Geohazards in the Alpine Environment—A Case Study in High Tatras, Slovakia. Remote Sens. 2020, 12, 3901. [Google Scholar] [CrossRef]
- Anders, N.; Valente, J.; Masselink, R.; Keesstra, S. Comparing Filtering Techniques for Removing Vegetation from UAV-Based Photogrammetric Point Clouds. Drones 2019, 3, 61. [Google Scholar] [CrossRef] [Green Version]
- Chaudhry, M.H.; Ahmad, A.; Gulzar, Q. Impact of UAV Surveying Parameters on Mixed Urban Landuse Surface Modelling. ISPRS Int. J. Geo-Inf. 2020, 9, 656. [Google Scholar] [CrossRef]
- Vander Jagt, B.; Lucieer, A.; Wallace, L.; Turner, D.; Durand, M. Snow Depth Retrieval with UAS Using Photogrammetric Techniques. Geosciences 2015, 5, 264–285. [Google Scholar] [CrossRef] [Green Version]
- Harder, P.; Schirmer, M.; Pomeroy, J.; Helgason, W. Accuracy of snow depth estimation in mountain and prairie environments by an unmanned aerial vehicle. Cryosphere 2016, 10, 2559–2571. [Google Scholar] [CrossRef] [Green Version]
- Miziński, B.; Niedzielski, T. Fully-automated estimation of snow depth in near real time with the use of unmanned aerial vehicles without utilizing ground control points. Cold Reg. Sci. Technol. 2017, 138, 63–72. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK Method—An Optimal Solution for Mapping Inaccessible Forested Areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef] [Green Version]
- Sona, G.; Pinto, L.; Pagliari, D. Experimental analysis of different software packages for orientation and digital surface modelling from UAV images. Earth Sci. Inform. 2014, 7, 97–107. [Google Scholar] [CrossRef]
- Gini, R.; Pagliari, D.; Passoni, D.; Pinto, L.; Sona, G.; Dosso, P. UAV photogrammetry: Block triangulation comparisons. International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 157–162. [Google Scholar] [CrossRef] [Green Version]
- Adams, M.S.; Bühler, Y.; Fromm, R. Multitemporal accuracy and precision assessment of unmanned aerial system photogrammetry for slope-scale snow depth maps in Alpine terrain. Pure Appl. Geophys. 2017, 175, 3303–3324. [Google Scholar] [CrossRef] [Green Version]
- Santise, M.; Fornari, M.; Forlani, G.; Roncella, R. Evaluation of DEM generation accuracy from UAS imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-5, 529–536. [Google Scholar] [CrossRef] [Green Version]
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry Using UAV-Mounted GNSS RTK: Georeferencing Strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Gerke, M.; Przybilla, H.-J. Accuracy Analysis of Photogrammetric UAV Image Blocks: Influence of Onboard RTK-GNSS and Cross Flight Patterns. Photogramm. Fernerkund. Geoinf. 2016, 12, 17–30. [Google Scholar] [CrossRef] [Green Version]
- Paine, D.P.; Kiser, J.D. Aerial Photography and Image Interpretation, 3rd ed.; Willey: New York, NY, USA, 2012. [Google Scholar]
- Kasprzak, M.; Jancewicz, K.; Michniewicz, A. UAV and SfM in Detailed Geomorphological Mapping of Granite Tors: An Example of Starościńskie Skały (Sudetes, SW Poland). Pure Appl. Geophys. 2018, 175, 3193–3207. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SfM 3D Model Accuracy in High-Relief Landscapes by Incorporating Oblique Images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef] [Green Version]
- López-Moreno, J.; Revuelto, J.; Alonso-Gonzalez, E.; Sanmiguel-Vallelado, A.; Fassnacht, S.R.; Deems, J.; Moran-Tejeda, E. Using very long-range terrestrial laser scanner to analyze the temporal consistency of the snowpack distribution in a high mountain environment. J. Mt. Sci. 2017, 14, 823–842. [Google Scholar] [CrossRef]
- Bühler, Y.; Adams, M.S.; Stoffel, A.; Boesch, R. Photogrammetric reconstruction of homogenous snow surfaces in alpine terrain applying near-infrared UAS imagery. Int. J. Remote Sens. 2017, 38, 3135–3158. [Google Scholar] [CrossRef]
- Nolan, M.; Larsen, C.; Sturm, M. Mapping snow depth from manned aircraft on landscape scales at centimeter resolution using structure-from-motion photogrammetry. Cryosphere 2015, 9, 1445–1463. [Google Scholar] [CrossRef] [Green Version]
- Lamsters, K.; Karušs, J.; Krievans, M.; Ješkins, J. High-resolution orthophoto map and digital surface models of the largest Argentine Islands (the Antarctic) from unmanned aerial vehicle photogrammetry. J. Maps 2020, 16, 335–347. [Google Scholar] [CrossRef]
- Boesch, R.; Bühler, Y.; Marty, M.; Ginzler, C. Comparison of digital surface models for snow depth mapping with UAV and aerial cameras. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences: Vol. XLI-B8, XXIII ISPRS Congress, Commission VIII, Prague, Czech Republic, 12–19 July 2016; Halounova, L., Šafář, V., Raju, P.L.N., Plánka, L., Ždímal, V., Srinivasa Kumar, T., Weng, Q., Eds.; ISPRS Congress: Istanbul, Turkey, 2016; pp. 453–458. [Google Scholar] [CrossRef] [Green Version]
- Agisoft LLC. Agisoft Metashape User Manual; Professional Edition, Version 1.5; Agisoft LLC: St. Petersburg, Russia, 2019. [Google Scholar]
- Prokop, A.; Schirmer, M.; Rub, M.; Lehning, M.; Stocker, M. A comparison of measurement methods: Terrestrial laser scanning, tachymetry and snow probing for the determination of the spatial snow-depth distribution on slopes. Ann. Glaciol. 2008, 49, 210–216. [Google Scholar] [CrossRef] [Green Version]
- De Michele, C.; Avanzi, F.; Passoni, D.; Barzaghi, R.; Pinto, L.; Dosso, P.; Ghezzi, A.; Gianatti, R.; Della Vedova, G. Using a fixed-wing UAS to map snow depth distribution: An evaluation at peak accumulation. Cryosphere 2016, 10, 511–522. [Google Scholar] [CrossRef] [Green Version]
- Adams, M.S.; Bühler, Y.; Boesch, R.; Fromm, R.; Stoffel, A.; Ginzler, C. Investigating the potential of low-cost remotely piloted aerial systems for monitoring the Alpine snow cover (RPAS4SNOW). In Final Project Report, ÖAW—Austrian Academy of Sciences; Austrian Academy of Sciences: Innsbruck, Austria, 2016; p. 82. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera Location Error | Point Cloud | ||||
|---|---|---|---|---|---|
| X Error (cm) | Y Error (cm) | Z Error (cm) | XY Error (cm) | Total Error (cm) | RMS Reprojection Error (pix) |
| 0.83253 | 0.70180 | 2.23633 | 1.08887 | 2.48733 | 1.00582 |
| Digital Surface Model | ||
|---|---|---|
| Depth Filtering Mode | Resolution (cm/pix) | Point Density (points/m2) |
| Disabled | 18.4 | 29.5 |
| Mild | 18.4 | 29.4 |
| Moderate | 18.3 | 29.8 |
| Aggressive | 18.3 | 29.8 |
| Camera Location Error | Point Cloud | ||||
|---|---|---|---|---|---|
| X Error (cm) | Y Error (cm) | Z Error (cm) | XY Error (cm) | Total Error (cm) | RMS Reprojection Error (pix) |
| 0.82326 | 0.75363 | 1.75554 | 1.11611 | 2.08030 | 1.31877 |
| Digital Surface Model | ||
|---|---|---|
| Depth Filtering Mode | Resolution (cm/pix) | Point Density (points/m2) |
| Disabled | 18.6 | 28.8 |
| Mild | 18.6 | 28.8 |
| Moderate | 18.4 | 29.7 |
| Aggressive | 18.7 | 28.7 |
| Disabled | Mild | Moderate | Aggressive | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Cover | SPCP (cm) | HSM1 (cm) | Difference SPCP–HSM1 (cm) | HSM2 (cm) | Difference SPCP–HSM2 (cm) | HSM3 (cm) | Difference SPCP–HSM3 (cm) | HSM4 (cm) | Difference SPCP–HSM4 (cm) |
| Grass and Shrubs | 98 | 76 | 22 | 71 | 27 | 77 | 21 | 73 | 25 |
| Grass and Shrubs | 155 | 109 | 46 | 103 | 52 | 100 | 55 | 108 | 47 |
| Grass and Shrubs | 100 | 93 | 7 | 92 | 8 | 93 | 7 | 92 | 8 |
| Grass and Shrubs | 87 | 65 | 22 | 68 | 19 | 61 | 26 | 67 | 20 |
| Grass and Shrubs | 112 | 115 | −3 | 119 | −7 | 115 | −3 | 118 | −6 |
| Grass and Shrubs | 178 | 130 | 48 | 132 | 46 | 124 | 54 | 128 | 50 |
| Mugo Pine | 130 | −66 | 196 | −67 | 197 | −70 | 200 | −60 | 190 |
| Mugo Pine | 134 | 0 | 134 | 3 | 131 | −1 | 135 | 6 | 128 |
| Mugo Pine | 165 | −35 | 200 | −38 | 203 | −32 | 197 | −32 | 197 |
| Mugo Pine | 80 | −99 | 179 | −97 | 177 | −96 | 176 | −90 | 170 |
| Averange | 85.10 | 85.30 | 86.80 | 82.90 | |||||
| Grass and Shrubs | 23.67 | 24.17 | 26.67 | 24.00 | |||||
| Mugo Pine | 177.25 | 177.00 | 177.00 | 171.25 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masný, M.; Weis, K.; Biskupič, M. Application of Fixed-Wing UAV-Based Photogrammetry Data for Snow Depth Mapping in Alpine Conditions. Drones 2021, 5, 114. https://doi.org/10.3390/drones5040114
Masný M, Weis K, Biskupič M. Application of Fixed-Wing UAV-Based Photogrammetry Data for Snow Depth Mapping in Alpine Conditions. Drones. 2021; 5(4):114. https://doi.org/10.3390/drones5040114
Chicago/Turabian StyleMasný, Matej, Karol Weis, and Marek Biskupič. 2021. "Application of Fixed-Wing UAV-Based Photogrammetry Data for Snow Depth Mapping in Alpine Conditions" Drones 5, no. 4: 114. https://doi.org/10.3390/drones5040114
APA StyleMasný, M., Weis, K., & Biskupič, M. (2021). Application of Fixed-Wing UAV-Based Photogrammetry Data for Snow Depth Mapping in Alpine Conditions. Drones, 5(4), 114. https://doi.org/10.3390/drones5040114