
Navigation of Underwater Drones and Integration of Acoustic Sensing with Onboard Inertial Navigation System




Abstract
1. Introduction
2. Baseline Positioning Systems
2.1. Long Baseline Systems
2.2. Ultra-Short Baseline Systems
2.3. Short Baseline Systems
2.4. GPS Intelligent Buoys
2.5. Comparison of Acoustical Positioning Methods
2.6. Positioning Systems Based on Absolute Velocity Measurements
3. Various Approaches to Underwater GPS
3.1. Positioning Based on the Bio-Inspired Sensing
3.2. Positioning with GPS and Dual Acoustic Device with USBL and Forward-Looking Sonar Combination
3.3. Positioning Systems Based on Orthogonal Waveforms
3.4. Positioning System Based on GPS Surface Nodes and Encoded Acoustic Signals
3.5. Positioning with Long Baseline (LBL)
3.6. Positioning with Long Baseline (LBL) under Ice
3.7. Synchronous-Clock, One-Way-Travel-Time Acoustic Navigation
3.8. Comparison of Various Approaches to Underwater Positioning
4. Doppler Effect-Based Acoustic Navigation
5. Navigation with the Aid of Position Estimation Algorithms Based on Acoustic Seabed Sensing and Angle Measurements
5.1. Sonars
5.2. Design and Performance of Sonars
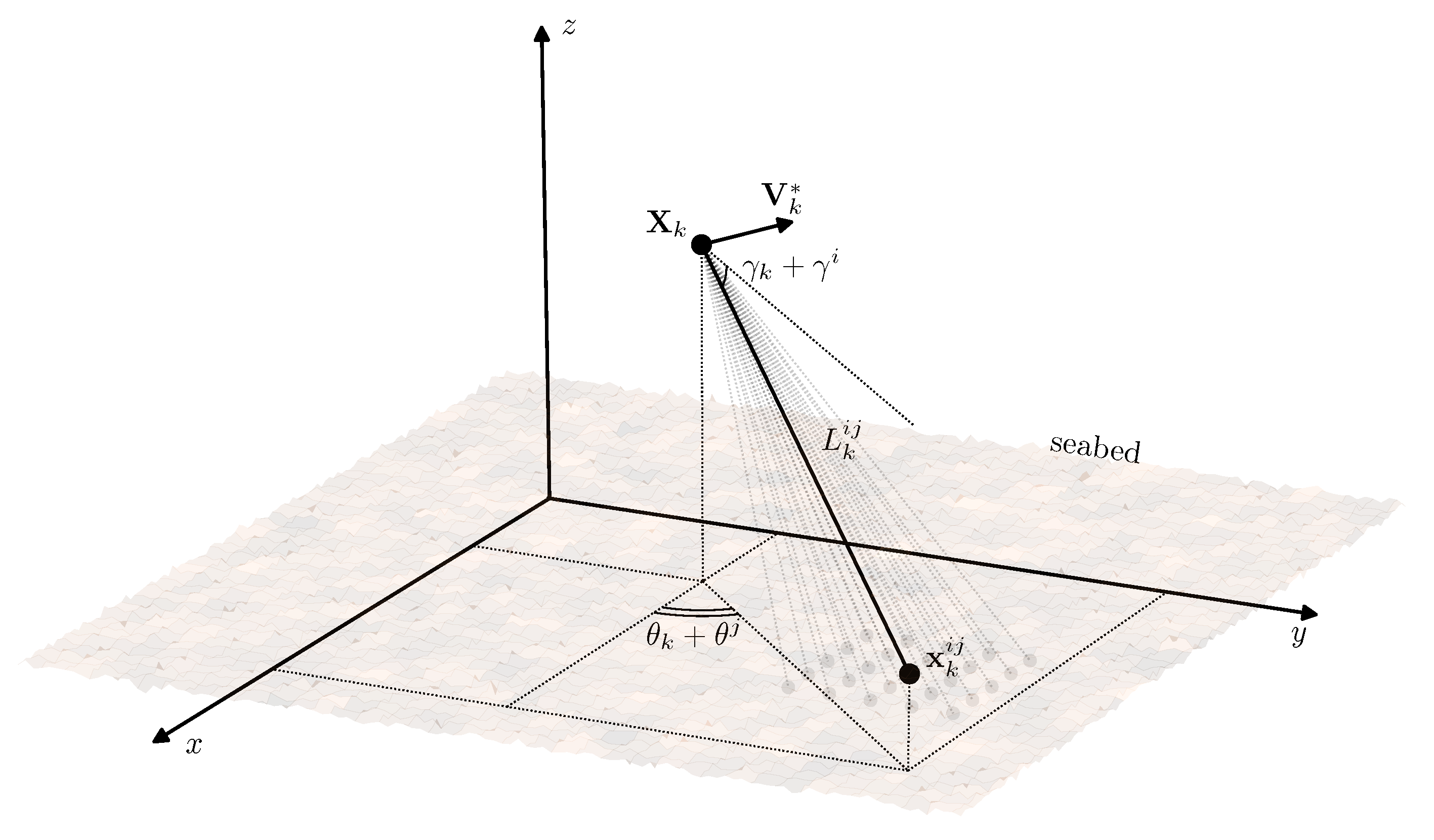
6. Position Estimation with Seabed Sensing
- at time instant , measure the seabed distances using the acoustic sensors and obtain the increments ;
- considering the direction angles’ values on the current step and the previous one , calculate the increments using , , ;
- evaluate the slope estimates , , ;
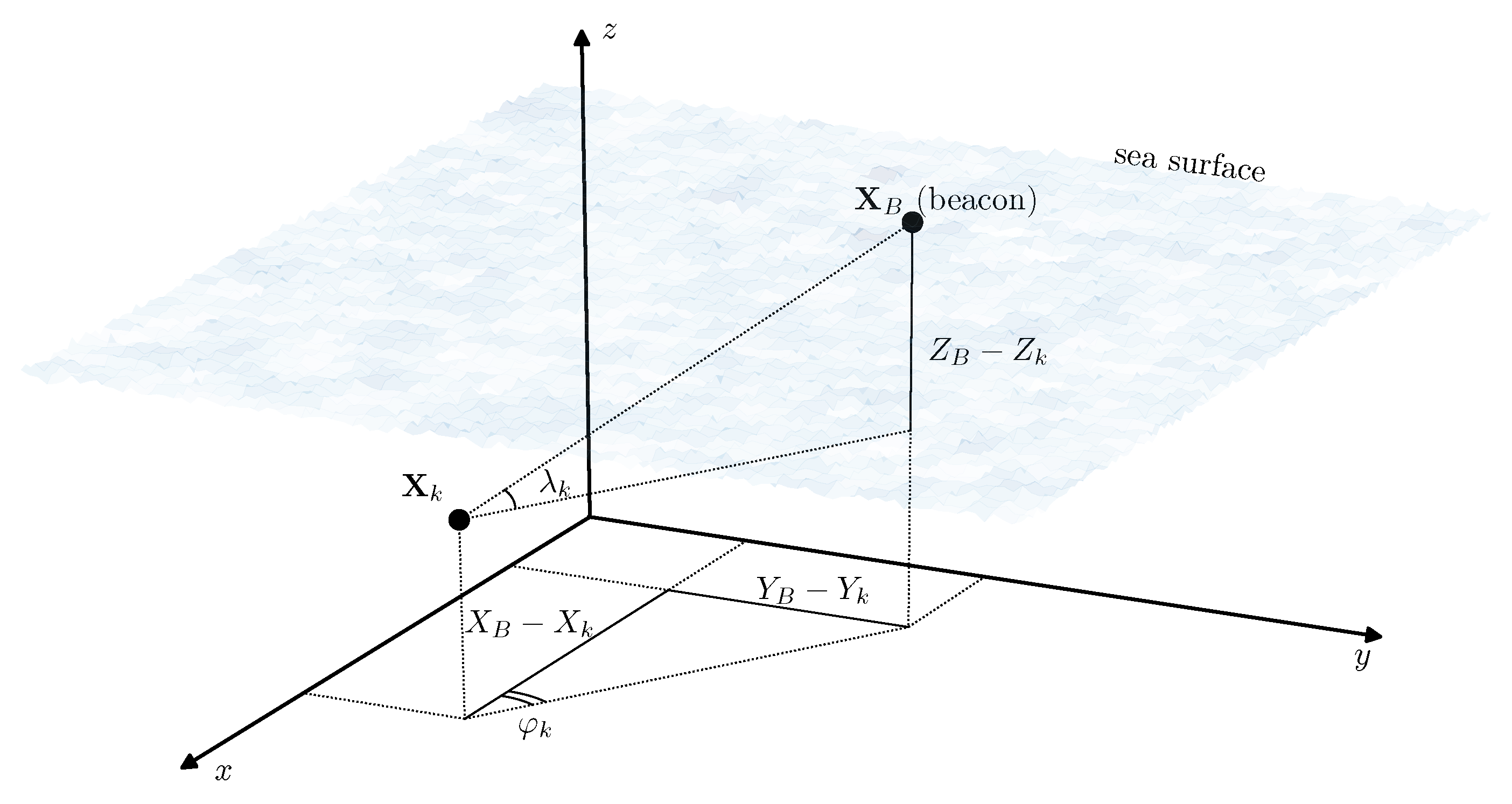
7. DOA Measurement Position Estimation
7.1. Pseudo-Measurement Filter
7.2. Conditionally Minimax Nonlinear Filter (CMNF)
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ADCP | acoustic Doppler current profilers |
| AUV | autonomous underwater vehicle |
| BL | baseline |
| CMNF | conditionally minimax nonlinear filter |
| DGPS | differential GPS |
| DOA | direction of arrival |
| DVL | Doppler velocity logs |
| EKF | extended Kalman filter |
| FLS | forward looking sonar |
| GIB | GPS intelligent buoy |
| GPS | Global Positioning System |
| INS | inertial navigation system |
| KF | Kalman filter |
| LBL | long baseline |
| MS | mother ship |
| OWTT | one-way-travel time |
| ROV | remotely operated vehicle |
| SAS | synthetic aperture sonars |
| SBL | short baseline |
| SINS | strap-down inertial navigation system |
| SSBL | super-short baseline |
| SV | surface vessel |
| UAV | unmanned aerial vehicle |
| UAPS | underwater acoustic positioning system |
| USBL | ultra-short baseline |
| WGS84 | World Geodetic System 1984 |
References
- Ehlers, F. (Ed.) Autonomous Underwater Vehicles: Design and Practice; Radar, Sonar & Navigation, Institution of Engineering and Technology: Stevenage, UK, 2020. [Google Scholar] [CrossRef]
- Gelin, C. A High-Rate Virtual Instrumentof Marine Vehicle Motions for Underwater Navigation and Ocean Remote Sensing; Springer Series on Naval Architecture, Marine Engineering, Shipbuilding and Shipping; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Foley, B.; Mindell, D. Precision Survey and Archaeological Methodology in Deep Water. ENALIA Annu. J. Hell. Inst. Mar. Archaeol. 2002, VI, 49–56. [Google Scholar]
- Wynn, R.B.; Huvenne, V.A.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef]
- Jakuba, M.V.; Roman, C.N.; Singh, H.; Murphy, C.; Kunz, C.; Willis, C.; Sato, T.; Sohn, R.A. Long-baseline acoustic navigation for under-ice autonomous underwater vehicle operations. J. Field Robot. 2008, 25, 861–879. [Google Scholar] [CrossRef]
- Norgren, P.; Skjetne, R. Using Autonomous Underwater Vehicles as Sensor Platforms for Ice-Monitoring. Model. Identif. Control 2014, 35, 263–277. [Google Scholar] [CrossRef]
- Unmanned Underwater Vehicles Market 2017–2025: Global Analysis and Forecasts by Type (Remotely Operated Underwater Vehicle and Autonomous Underwater Vehicle) and Application (Commercial, Military) M2 Presswire. 6 November 2017. Available online: https://www.proquest.com/docview/1960521851/5BFDD371D1104265PQ/ (accessed on 11 August 2021).
- Hunt, M.M.; Marquet, W.M.; Moller, D.A.; Peal, K.R.; Smith, W.K.; Spindel, R.C. An Acoustic Navigation System; WHOI Technical Reports; Woods Hole Oceanographic Institution: Falmouth, MA, USA, 1974. [Google Scholar] [CrossRef]
- Christ, R.D.; Wernli, R.L. The ROV Manual. A User Guide for Remotely Operated Vehicles; Butterworth-Heinemann: Oxford, UK, 2014. [Google Scholar] [CrossRef]
- Aidala, V.J.; Nardone, S.C. Biased Estimation Properties of the Pseudolinear Tracking Filter. IEEE Trans. Aerosp. Electron. Syst. 1982, AES-18, 432–441. [Google Scholar] [CrossRef]
- Pugachev, V.; Sinitsyn, I.N. Stochastic Differential Systems Analysis and Filtering; Wiley: Hoboken, NJ, USA, 1987. [Google Scholar]
- Kebkal, K.G.; Mashoshin, A.I. AUV acoustic positioning methods. Gyroscopy Navig. 2017, 8, 80–89. [Google Scholar] [CrossRef]
- Tan, H.P.; Diamant, R.; Seah, W.K.; Waldmeyer, M. A survey of techniques and challenges in underwater localization. Ocean Eng. 2011, 38, 1663–1676. [Google Scholar] [CrossRef]
- Zhang, J.; Han, Y.; Zheng, C.; Sun, D. Underwater target localization using long baseline positioning system. Appl. Acoust. 2016, 111, 129–134. [Google Scholar] [CrossRef]
- Chen, Y.; Zheng, D.; Miller, P.A.; Farrell, J.A. Underwater Inertial Navigation With Long Baseline Transceivers: A Near-Real-Time Approach. IEEE Trans. Control Syst. Technol. 2016, 24, 240–251. [Google Scholar] [CrossRef]
- Fujimoto, H.; Furuta, T.; Murakami, H. Underwater positioning by long-baseline acoustic navigation system and relocation of transponders. Mar. Geod. 1988, 12, 201–219. [Google Scholar] [CrossRef]
- Li, J.; Gao, H.; Zhang, S.; Chang, S.; Chen, J.; Liu, Z. Self-localization of autonomous underwater vehicles with accurate sound travel time solution. Comput. Electr. Eng. 2016, 50, 26–38. [Google Scholar] [CrossRef]
- Reis, J.; Morgado, M.; Batista, P.; Oliveira, P.; Silvestre, C. Design and Experimental Validation of a USBL Underwater Acoustic Positioning System. Sensors 2016, 16, 1491. [Google Scholar] [CrossRef] [PubMed]
- Hegrenaes, Ø.; Hallingstad, O. Model-Aided INS With Sea Current Estimation for Robust Underwater Navigation. IEEE J. Ocean. Eng. 2011, 36, 316–337. [Google Scholar] [CrossRef]
- Wolbrecht, E.; Anderson, M.; Canning, J.; Edwards, D.; Frenzel, J.; Odell, D.; Bean, T.; Stringfield, J.; Feusi, J.; Armstrong, B.; et al. Field Testing of Moving Short-baseline Navigation for Autonomous Underwater Vehicles using Synchronized Acoustic Messaging. J. Field Robot. 2013, 30, 519–535. [Google Scholar] [CrossRef]
- Gao, J.; Liu, C.; Proctor, A. Nonlinear model predictive dynamic positioning control of an underwater vehicle with an onboard USBL system. J. Mar. Sci. Technol. 2016, 21, 57–69. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, T.; Jin, B.; Zhu, Y.; Tong, J. Student’s t-Based Robust Kalman Filter for a SINS/USBL Integration Navigation Strategy. IEEE Sens. J. 2020, 20, 5540–5553. [Google Scholar] [CrossRef]
- Luo, Q.; Yan, X.; Ju, C.; Chen, Y.; Luo, Z. An Ultra-Short Baseline Underwater Positioning System with Kalman Filtering. Sensors 2020, 21, 143. [Google Scholar] [CrossRef]
- Wernli, R. The Present and Future Capabilities of Deep ROVs. Mar. Technol. Soc. J. 1999, 33, 26–40. [Google Scholar] [CrossRef]
- Coudeville, J.M.; Hubert, T. GPS intelligent buoys for supervised underwater vehicle navigation. Ocean News Technol. 1998, 4. Available online: https://www.proquest.com/docview/199936049/612DB42D099B42A7PQ/ (accessed on 11 August 2021).
- GPS Intelligent Buoys. Ocean News & Technology. 2003, Volume 9. Available online: https://www.proquest.com/docview/199921090/9789F734569D4A96PQ/ (accessed on 11 August 2021).
- Zhang, D.; Ashraf, M.A.; Liu, Z.; Peng, W.X.; Golkar, M.J.; Mosavi, A. Dynamic modeling and adaptive controlling in GPS-intelligent buoy (GIB) systems based on neural-fuzzy networks. Ad Hoc Netw. 2020, 103, 102149. [Google Scholar] [CrossRef]
- Denny, M. The Science of Navigation: From Dead Reckoning to GPS; Johns Hopkins University Press: Baltimor, MD, USA, 2012. [Google Scholar]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Powell, S.B.; Garnett, R.; Marshall, J.; Rizk, C.; Gruev, V. Bioinspired polarization vision enables underwater geolocalization. Sci. Adv. 2018, 4, eaao6841. [Google Scholar] [CrossRef] [PubMed]
- Garcia, M.; Edmiston, C.; Marinov, R.; Vail, A.; Gruev, V. Bio-inspired color-polarization imager for real-time in situ imaging. Optica 2017, 4, 1263–1271. [Google Scholar] [CrossRef]
- Garcia, M.; Davis, T.; Blair, S.; Cui, N.; Gruev, V. Bioinspired polarization imager with high dynamic range. Optica 2018, 5, 1240–1246. [Google Scholar] [CrossRef]
- Garcia, M.; Davis, T.; Marinov, R.; Blair, S.; Gruev, V. Biologically inspired imaging sensors for multi-spectral and polarization imagery. In Polarization: Measurement, Analysis, and Remote Sensing XIII, Proceedings of the SPIE Commercial + Scientific Sensing and Imaging, Orlando, FL, USA, 15–19 April 2018; Chenault, D.B., Goldstein, D.H., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2018; Volume 10655, pp. 77–84. [Google Scholar] [CrossRef]
- Zhong, B.; Wang, X.; Gan, X.; Yang, T.; Gao, J. A Biomimetic Model of Adaptive Contrast Vision Enhancement from Mantis Shrimp. Sensors 2020, 20, 4588. [Google Scholar] [CrossRef]
- Ai, L.L.; Xu, W.H.; Liu, Y.C.; Gu, J.L. Underwater GPS Positioning System Based on a Dual Acoustic Device. In Applied Mechanics and Materials; Applied Scientific Research and Engineering Developments for Industry; Trans Tech Publications Ltd.: Bäch, Switzerland, 2013; Volume 385, pp. 1255–1259. [Google Scholar] [CrossRef]
- Han, Y.; Zheng, C.; Sun, D. Signal design for underwater acoustic positioning systems based on orthogonal waveforms. Ocean Eng. 2016, 117, 15–21. [Google Scholar] [CrossRef]
- Aparicio, J.; Jiménez, A.; Álvarez, F.J.; Ruiz, D.; De Marziani, C.; Ureña, J. Characterization of an Underwater Positioning System Based on GPS Surface Nodes and Encoded Acoustic Signals. IEEE Trans. Instrum. Meas. 2016, 65, 1773–1784. [Google Scholar] [CrossRef]
- Milne, P.H. Underwater Acoustic Positioning Systems; Gulf Publishing Company: Houston, TX, USA, 1983. [Google Scholar]
- Schories, D.; Niedzwiedz, G. Precision, accuracy, and application of diver-towed underwater GPS receivers. Environ. Monit. Assess. 2012, 184, 2359–2372. [Google Scholar] [CrossRef]
- Webster, S.E.; Eustice, R.M.; Singh, H.; Whitcomb, L.L. Advances in single-beacon one-way-travel-time acoustic navigation for underwater vehicles. Int. J. Robot. Res. 2012, 31, 935–950. [Google Scholar] [CrossRef]
- Eustice, R.M.; Singh, H.; Whitcomb, L.L. Synchronous-clock, one-way-travel-time acoustic navigation for underwater vehicles. J. Field Robot. 2011, 28, 121–136. [Google Scholar] [CrossRef]
- Claus, B.; Kepper, J.H., IV; Suman, S.; Kinsey, J.C. Closed-loop one-way-travel-time navigation using low-grade odometry for autonomous underwater vehicles. J. Field Robot. 2018, 35, 421–434. [Google Scholar] [CrossRef]
- Snyder, J. Doppler Velocity Log (DVL) navigation for observation-class ROVs. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–9. [Google Scholar] [CrossRef]
- Hegrenaes, O.; Berglund, E. Doppler water-track aided inertial navigation for autonomous underwater vehicle. In Proceedings of the OCEANS 2009-EUROPE, Bremen, Germany, 11–14 May 2009; pp. 1–10. [Google Scholar] [CrossRef]
- Liu, X.; Xu, X.; Liu, Y.; Wang, L. Kalman Filter for Cross-Noise in the Integration of SINS and DVL. Math. Probl. Eng. 2014, 2014, 260209. [Google Scholar] [CrossRef]
- Brokloff, N. Matrix algorithm for Doppler sonar navigation. In Proceedings of the OCEANS’94, Brest, France, 13–16 September 1994; Volume 3, pp. III/378–III/383. [Google Scholar] [CrossRef]
- Guangcai, W.; Xu, X.; Yao, Y. An Iterative Doppler Velocity Log Error Calibration Algorithm Based on Newton Optimization. Math. Probl. Eng. 2020, 2020, 3194034. [Google Scholar] [CrossRef]
- Klein, I.; Diamant, R. Observability Analysis of DVL/PS Aided INS for a Maneuvering AUV. Sensors 2015, 15, 26818–26837. [Google Scholar] [CrossRef]
- Tal, A.; Klein, I.; Katz, R. Inertial Navigation System/Doppler Velocity Log (INS/DVL) Fusion with Partial DVL Measurements. Sensors 2017, 17, 415. [Google Scholar] [CrossRef]
- Whitcomb, L.; Yoerger, D.; Singh, H. Advances in Doppler-based navigation of underwater robotic vehicles. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 1, pp. 399–406. [Google Scholar] [CrossRef]
- Miller, A.; Miller, B. Tracking of the UAV trajectory on the basis of bearing-only observations. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 4178–4184. [Google Scholar] [CrossRef]
- Miller, A. Developing algorithms of object motion control on the basis of Kalman filtering of bearing-only measurements. Autom. Remote Control 2015, 76, 1018–1035. [Google Scholar] [CrossRef]
- Miller, A.; Miller, B. Stochastic control of light UAV at landing with the aid of bearing-only observations. In Proceedings of the Eighth International Conference on Machine Vision (ICMV 2015), Barcelona, Spain, 19–21 November 2015; Verikas, A., Radeva, P., Nikolaev, D., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2015; Volume 9875, pp. 474–483. [Google Scholar] [CrossRef]
- Lucas, B.D.; Kanade, T. An Iterative Image Registration Technique with an Application to Stereo Vision. In Proceedings of the 7th International Joint Conference on Artificial Intelligence (IJCAI’81), Vancouver, BC, Canada, 24–28 August 1981; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1981; Volume 2, pp. 674–679. [Google Scholar]
- Lowe, D. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 2, pp. 1150–1157. [Google Scholar] [CrossRef]
- Morice, C.; Veres, S.; McPhail, S. Terrain referencing for autonomous navigation of underwater vehicles. In Proceedings of the OCEANS 2009-EUROPE, Bremen, Germany, 11–14 May 2009; pp. 1–7. [Google Scholar] [CrossRef]
- Nygren, I.; Jansson, M. Terrain navigation for underwater vehicles using the correlator method. IEEE J. Ocean. Eng. 2004, 29, 906–915. [Google Scholar] [CrossRef]
- Pailhas, Y.; Petillot, Y.; Capus, C. High-Resolution Sonars: What Resolution Do We Need for Target Recognition? EURASIP J. Adv. Signal Process. 2010, 2010, 205095. [Google Scholar] [CrossRef][Green Version]
- Bellettini, A.; Pinto, M. Design and Experimental Results of a 300-kHz Synthetic Aperture Sonar Optimized for Shallow-Water Operations. IEEE J. Ocean. Eng. 2009, 34, 285–293. [Google Scholar] [CrossRef]
- Ferguson, B.G.; Wyber, R.J. Generalized Framework for Real Aperture, Synthetic Aperture, and Tomographic Sonar Imaging. IEEE J. Ocean. Eng. 2009, 34, 225–238. [Google Scholar] [CrossRef]
- Hodges, R. Underwater Acoustics: Analysis, Design and Performance of Sonar; Wiley: New York, NY, USA, 2011. [Google Scholar] [CrossRef]
- Abraham, D. Underwater Acoustic Signal Processing: Modeling, Detection, and Estimation; Modern Acoustics and Signal Processing; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- Ribas, D.; Ridao, P.; Neira, J. Underwater SLAM for Structured Environments Using an Imaging Sonar; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Miller, A.; Miller, B.; Miller, G. AUV navigation with seabed acoustic sensing. In Proceedings of the 2018 Australian New Zealand Control Conference (ANZCC), Melbourne, VIC, Australia, 7–8 December 2018; pp. 166–171. [Google Scholar] [CrossRef]
- Miller, A.; Miller, B.; Miller, G. On AUV Control with the Aid of Position Estimation Algorithms Based on Acoustic Seabed Sensing and DOA Measurements. Sensors 2019, 19, 5520. [Google Scholar] [CrossRef]
- Lin, X.; Kirubarajan, T.; Bar-Shalom, Y.; Maskell, S. Comparison of EKF, pseudomeasurement, and particle filters for a bearing-only target tracking problem. In Signal and Data Processing of Small Targets 2002, Proceedings of the AEROSENSE 2002, Orlando, FL, USA, 1–5 April 2002; Drummond, O.E., Ed.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2002; Volume 4728, pp. 240–250. [Google Scholar]
- Pankov, A.R.; Bosov, A.V. Conditionally minimax algorithm for nonlinear system state estimation. IEEE Trans. Autom. Control 1994, 39, 1617–1620. [Google Scholar] [CrossRef]
- Borisov, A.V.; Bosov, A.V.; Kibzun, A.I.; Miller, G.B.; Semenikhin, K.V. The Conditionally Minimax Nonlinear Filtering Method and Modern Approaches to State Estimation in Nonlinear Stochastic Systems. Autom. Remote Control 2018, 79, 1–11. [Google Scholar] [CrossRef]
- Bosov, A.; Miller, G. Conditionally Minimax Nonlinear Filter and Unscented Kalman Filter: Empirical Analysis and Comparison. Autom. Remote Control 2019, 80, 1230–1251. [Google Scholar] [CrossRef]
- Borisov, A.; Bosov, A.; Miller, B.; Miller, G. Passive Underwater Target Tracking: Conditionally Minimax Nonlinear Filtering with Bearing-Doppler Observations. Sensors 2020, 20, 2257. [Google Scholar] [CrossRef]
- Miller, G. AUV Position Estimation with Seabed Acoustic Sensing and DOA Measurements Source Code. Available online: https://github.com/horribleheffalump/AUVResearch (accessed on 11 August 2021).



{kind=link}
{kind=link}
| Method | Position of Beacons/Transponders | Accuracy | Note |
|---|---|---|---|
| LBL | Sea floor/surface | 0.1–1 m | operation ranges limited (up to 5 km) |
| USBL | SV (surface vessel) | 1 m | only limited by SV |
| SBL | SV/fixed platform | up to 0.1 m | |
| GIBs | Sea surface | up to 1 m (as LBL) | easy installation |
| Method | Additional Means | Accuracy | Operation Range | Multiple AUV |
|---|---|---|---|---|
| USBL + FLS | SV (surface vessel) | 1.2 m | Close to SV | No |
| Orthogonal waveform | High | Yes | ||
| GPS surface beacon | Encoded signals | High | Close to beacon | Yes |
| LBL + OWTT | SV (surface vessel) | 1 m (as LBL) | Close to SV | Yes |
| Scale factor | |||
| Pitch | |||
| Roll | |||
| Yaw |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miller, A.; Miller, B.; Miller, G. Navigation of Underwater Drones and Integration of Acoustic Sensing with Onboard Inertial Navigation System. Drones 2021, 5, 83. https://doi.org/10.3390/drones5030083
Miller A, Miller B, Miller G. Navigation of Underwater Drones and Integration of Acoustic Sensing with Onboard Inertial Navigation System. Drones. 2021; 5(3):83. https://doi.org/10.3390/drones5030083
Chicago/Turabian StyleMiller, Alexander, Boris Miller, and Gregory Miller. 2021. "Navigation of Underwater Drones and Integration of Acoustic Sensing with Onboard Inertial Navigation System" Drones 5, no. 3: 83. https://doi.org/10.3390/drones5030083
APA StyleMiller, A., Miller, B., & Miller, G. (2021). Navigation of Underwater Drones and Integration of Acoustic Sensing with Onboard Inertial Navigation System. Drones, 5(3), 83. https://doi.org/10.3390/drones5030083