On the Dominant Factors of Civilian-Use Drones: A Thorough Study and Analysis of Cross-Group Opinions Using a Triple Helix Model (THM) with the Analytic Hierarchy Process (AHP)



Abstract
1. Introduction
2. Literature Study and Methods
2.1. Drones and Their Civilian Uses
2.2. Review for the Consideration Factors
2.2.1. Cost
2.2.2. Performance and Applications
2.2.3. Operation(s)
2.2.4. Maintenance
2.2.5. Short Summary
2.3. Methods: Delphi and AHP
2.3.1. Delphi Method
- Anonymity: Participants, almost all being experts, are interviewed by mail or a computer network.
- Iteration: There are rounds for a Delphi process. The first round is inventory (probing). The number of rounds can be determined in advance or “on the fly” according to the stability of individual judgments.
- Feedback: The results of the first (inventory) round are usually sent back to all participants. In the second round, the Delphi asks participants to make arguments about their deviational estimations for the criteria set fixed in the first round. It will feedback these arguments and the statistical results to all participants before any third and subsequent rounds begin.
- The problem is not suitable for precise analytical techniques but can benefit from collective subjective judgments.
- Individuals who contribute to the review of broad or complex issues do not have a sufficient history of communication and may have different backgrounds in experience and expertise.
- In face-to-face communication, people need to communicate effectively.
- Time and cost make frequent group meetings not feasible.
- The supplementary group communication can improve a face-to-face meeting’s efficiency.
- Disagreements between individuals are serious or politically unpleasant, so the communication process must be reviewed and anonymity ensured.
- Dominance due to quantity or personality power must be avoided.
- To collect current and historical data, although the data cannot be accurately known.
- To evaluate possible budget allocations.
- To explore urban and regional planning options.
- To build an educational model.
- To describe the pros and cons associated with potential policy options.
- To distinguish and clarify real and perceived human motivations.
- To explore priorities of personal values, social goals, etc.
2.3.2. Analytic Hierarchy Process (AHP)
3. Processes and Results
3.1. Confirming the Factors with Delphi Method
3.2. Prioritizing the Factors with AHP Method
3.2.1. Academia (A) Group’s Opinions
3.2.2. Industry (I) Group’s Opinions
3.2.3. Research Institute (R) Group’s Opinions
3.3. A Short Summary
4. Discussion and Implications
5. Conclusions and Future Recommendations
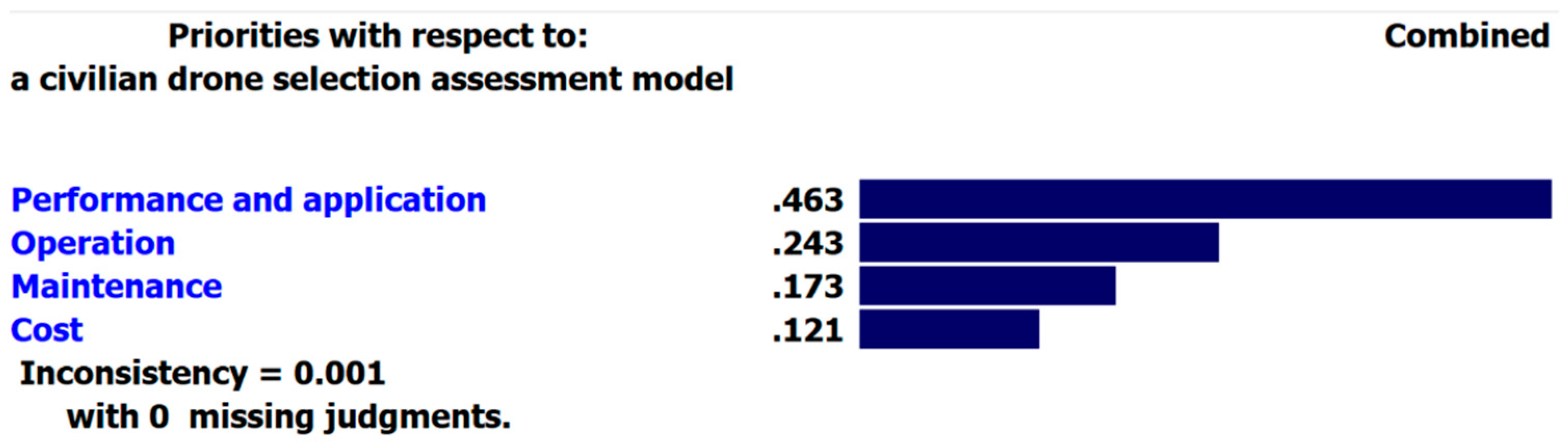
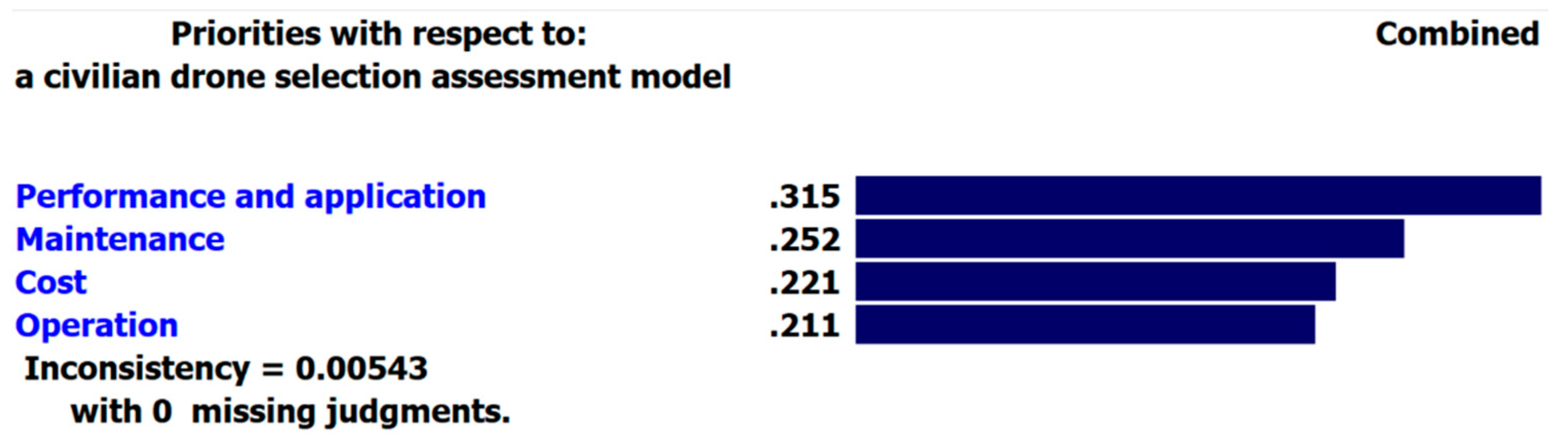
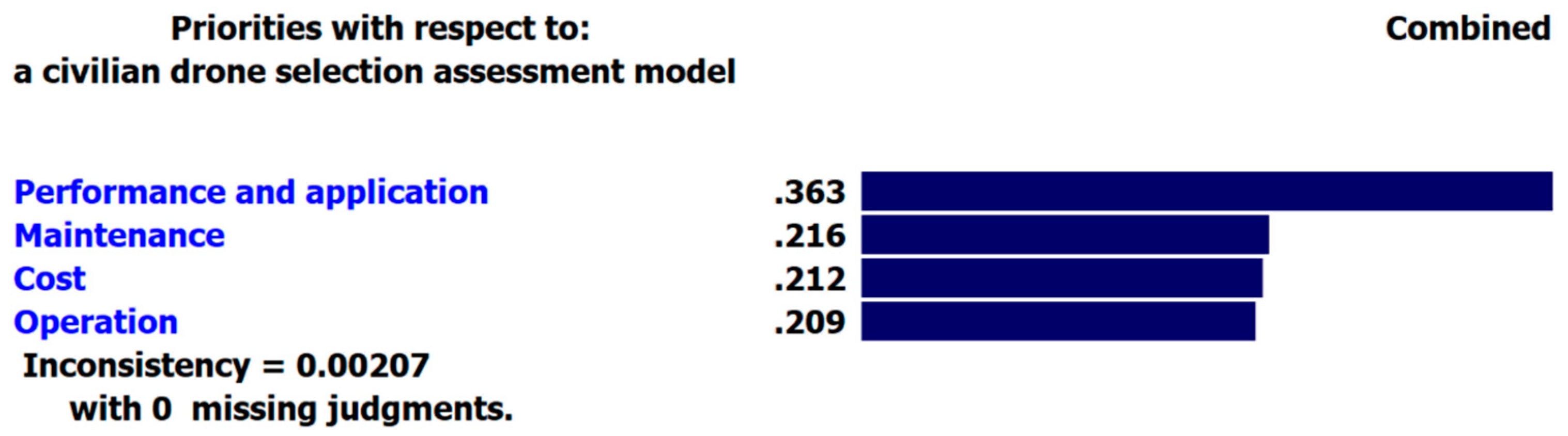
- Regardless of the subject group, the experts have a consensus that construct CB, performance and application, is the most significant construct to be considered without exception.
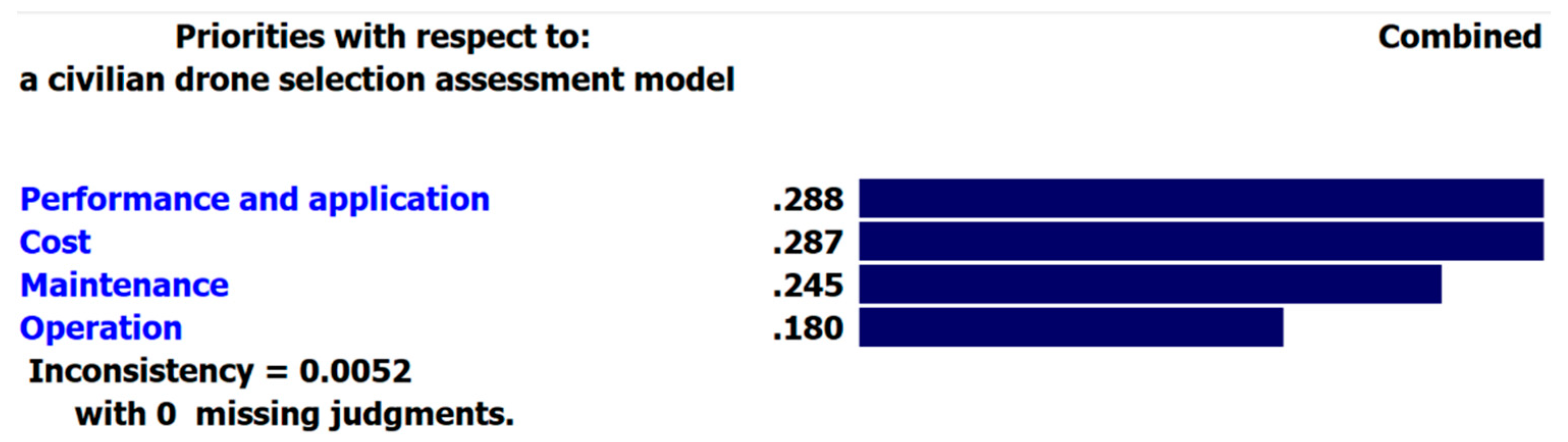
- For the importance of the three remaining constructs, the opinions are quite diversified, because, except for CB, each group feels a different construct (either CA, or CC, or CD) to be more important than another two.
- No construct proposed by this study is meaningless, since even the construct with the lowest importance among the three groups has a weight of 12.1% (i.e., CA by party A).
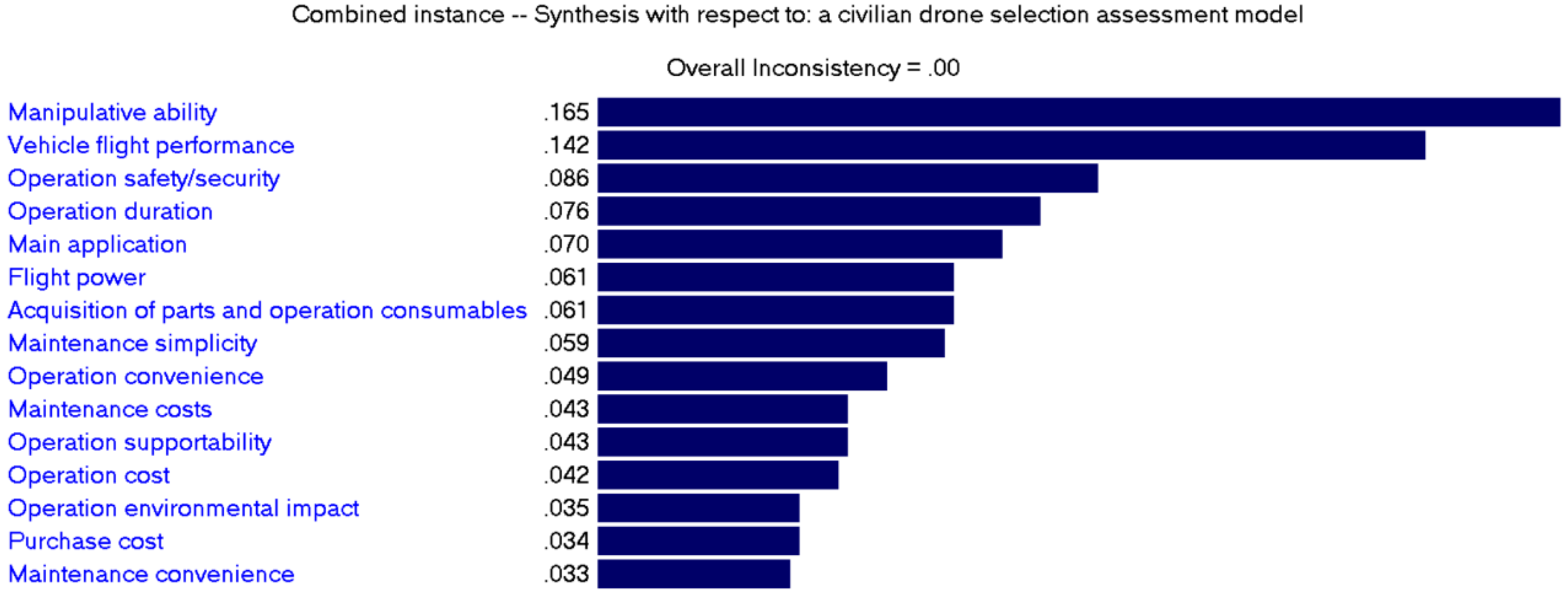
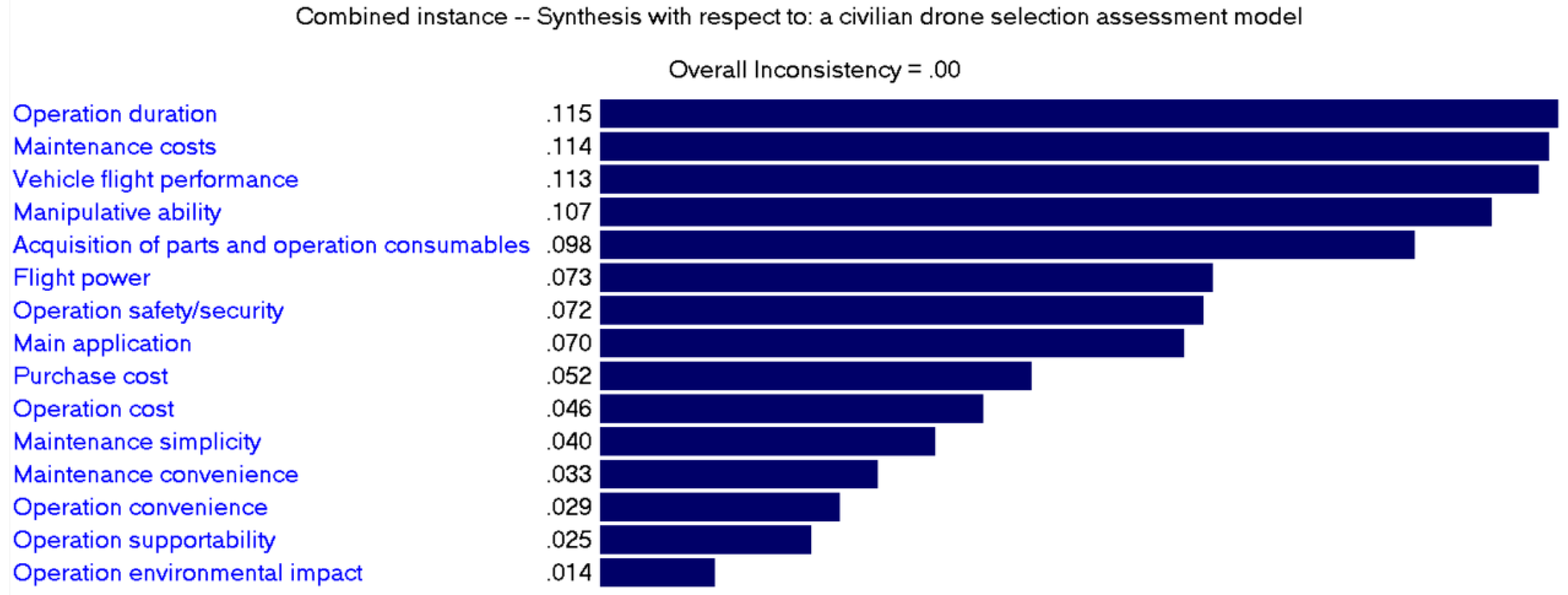
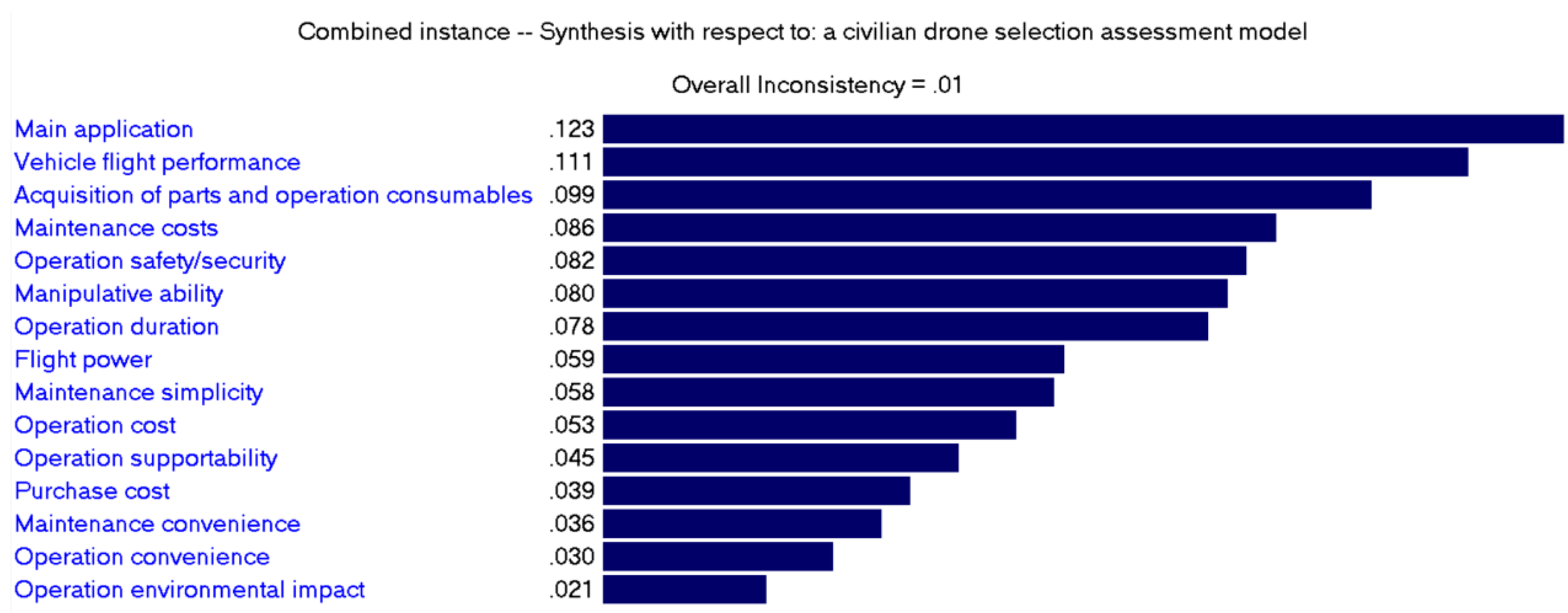
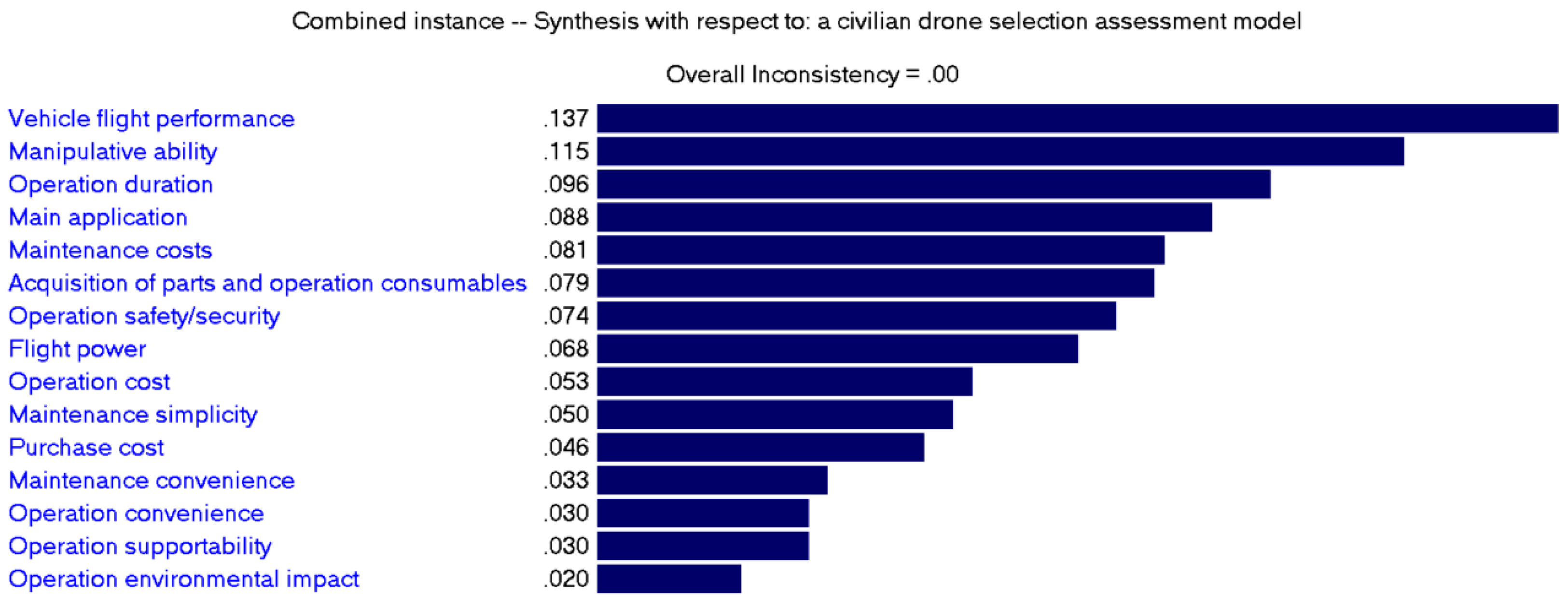
- The three groups have reached a consensus on the overall rank (i.e., connoting the priority for its importance level) of many factors to a certain extent, among all of the 15 factors considered, which are ca2: operation cost, cb1: vehicle flight performance, cb3: flight power, cc4: operation environmental impact, cd1: maintenance simplicity, cd2: maintenance convenience, and cd3: acquisition of parts and operation consumables.
- Compared to the situation in which the expert groups sometimes rank the factors under CA and CB very diversely but sometimes do not, their opinions are relatively stable for all factors under CC, and no variance in rank is observed for all factors under CD using the SRD measure.
- Using ARD as the measure, CA (cost) is shown to have a larger average ranking difference (over all factors) than CB (performance and application), CC (operation), and CD (maintenance); such an order concurs with the order that is justified using the previous variance measure (in terms of the farthest distance in SRD between any two factors under the constructs). In other words, these outcomes may cross-validate with each other.
- There is another set of eight factors that received more opinion differences from the three groups of experts. According to the SRD values of these factors (i.e., the degree to which the opinions of the groups are diversified), these factors can be sorted in descending order as: ca3 (16) > cb4 (14) > cb5 (12) > (ca1, cb2, cc1) (10) > (cc2, cc3) (8). Both the set of factors and the order of them are worthwhile knowledge to close the opinion gaps before the experts sit down together.
- By reference to the theory in the field of big data or MADM, we put an emphasis on the opinions of the factors that are extraordinary. Therefore, the last insight is that the three groups of experts have the largest opinion differences on factors ca3: maintenance cost, cb4: main application, and cb5: operation duration. This implies that they may reach little consensus while the relevant drafts to regulate the civilian use of drones are discussed after they sit down together if no extra coordination about their preferences and intentions toward the factors is made.
- As the focus of this study is on the importance of the constructs and the factors (either relative or absolute), this study uses AHP for CR-validation and CWV-determination; the last phase of AHP or other MADM methodologies can be applied to the real selection problem of drones [6,9,97]. As current data profiles of different brands of drones can be aggregated as a “decision matrix” (which means a set of computer data), together with the human data polled in this study, integrating the heterogeneous data sets, solving the selection problem, and performing the decision analysis based thereon should be an interesting DDDM study [12].
- Some techniques in the (big) data analytics field can be applied to test whether each pair of the group opinions of experts is “really dissimilar” or not, and recently this concept has become popular. For this, we refer to the non-parametric tests used by the “similarity confirmation method” [12,99]. Besides this, using other non-parametric-based measures and comparing the results should also be interesting.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A


References
- Sorgedrager, N. Using Consumer Drones in Surveying Deltas and Coastal Systems. Master’s Thesis, Water Science and Management, Universiteit Utrecht, Utrecht, The Netherlands, 2019. [Google Scholar]
- Drone Industry Insights. The Drone Market Report 2020–2025. Available online: https://droneii.com/product/drone-market-report-2020-2025 (accessed on 8 February 2021).
- Sah, B.; Gupta, R.; Bani-Hani, D. Analysis of barriers to implement drone logistics. Int. J. Logist. Res. Appl. 2020. [Google Scholar] [CrossRef]
- Simões, P.C.; Moreira, A.C.; Mendes Dias, C. Portugal’s Changing Defense Industry: Is the Triple Helix Model of Knowledge Society Replacing State Leadership Model? J. Open Innov. Technol. Mark. Complex. 2020, 6, 183. [Google Scholar] [CrossRef]
- Jia, L.; Alizadeh, R.; Hao, J.; Wang, G.; Allen, J.K.; Mistree, F. A rule-based method for automated surrogate model selection. Adv. Eng. Inform. 2020, 45, 101123. [Google Scholar] [CrossRef]
- Zhuang, Z.-Y.; Chiang, I.-J.; Su, C.-R.; Chen, C.-Y. Modelling the decision of paper shredder selection using analytic hierarchy process and graph theory and matrix approach. Adv. Mech. Eng. 2017, 9, 1–11. [Google Scholar] [CrossRef]
- Zhuang, Z.-Y.; Lin, C.-C.; Chen, C.-Y.; Su, C.-R. Rank-based comparative research flow benchmarking the effectiveness of AHP–GTMA on aiding decisions of shredder selection by reference to AHP–TOPSIS. Appl. Sci. 2018, 8, 1974. [Google Scholar] [CrossRef]
- Chi, L.-P.; Fu, C.-H.; Chyng, J.-P.; Zhuang, Z.-Y.; Huang, J.-H. A post-training study on the budgeting criteria set and priority for MALE UAS design. Sustainability 2019, 11, 1798. [Google Scholar] [CrossRef]
- Chi, L.-P.; Zhuang, Z.-Y.; Fu, C.-H.; Huang, J.-H. A knowledge discovery education framework targeting the effective budget use and opinion explorations in designing specific high cost product. Sustainability 2018, 10, 2742. [Google Scholar] [CrossRef]
- Ulloa, C.; Nuñez, J.M.; Lin, C.; Rey, G. AHP-based design method of a lightweight, portable and flexible air-based PV-T module for UAV shelter hangars. Renew. Energy 2018, 123, 767–780. [Google Scholar] [CrossRef]
- Song, C.; Zang, Y.; Zhou, Z.; Luo, X.; Zhao, L.; Ming, R.; Zi, L.; Zang, Y. Test and comprehensive evaluation for the performance of UAV-based fertilizer spreaders. IEEE Access 2020, 8, 202153–202163. [Google Scholar] [CrossRef]
- Zhuang, Z.-Y.; Su, C.-R.; Chang, S.-C. The effectiveness of IF-MADM (intuitionistic-fuzzy multi-attribute decision-making) for group decisions: Methods and an empirical assessment for the selection of a senior centre. Technol. Econ. Dev. Econ. 2019, 25, 322–364. [Google Scholar] [CrossRef]
- Gertler, J.U.S. Unmanned Aerial Systems; Congressional Research Service: Washington, DC, USA, 2012. [Google Scholar]
- Ravich, T.M. The integration of unmanned aerial vehicles into the National Airspace. NDL Rev. 2009, 85, 597–622. [Google Scholar]
- Fladeland, M.; Schoenung, S.; Lord, M. UAS platforms. In Proceedings of the NCAR/EOL Workshop–Unmanned Aircraft Systems for Atmospheric Research, Boulder, CO, USA, 21–24 February 2017; pp. 21–24. [Google Scholar]
- Gupta, S.G.; Ghonge, M.M.; Jawandhiya, P.M. Review of unmanned aircraft system (UAS). Int. J. Adv. Res. Comput. Eng. Technol. 2013, 2, 1646–1658. [Google Scholar] [CrossRef]
- Murphy, J.R.; Williams-Hayes, P.S.; Kim, S.K.; Bridges, W.; Marston, M. Flight test overview for UAS integration in the NAS project. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, San Diego, CA, USA, 4–8 January 2016; p. 1756. [Google Scholar]
- Austin, R. Unmanned Aircraft Systems: UAVS Design, Development and Deployment; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 54. [Google Scholar]
- Grand View Research. Commercial Drone Market Size & Trends Report, 2019-2025. Available online: https://www.grandviewresearch.com/industry-analysis/global-commercial-drones-market (accessed on 6 February 2021).
- Fuhrmann, M.; Horowitz, M.C. Droning on: Explaining the proliferation of unmanned aerial vehicles. Int. Organ. 2017, 71, 397–418. [Google Scholar] [CrossRef]
- Grimaccia, F.; Aghaei, M.; Mussetta, M.; Leva, S.; Quater, P.B. Planning for PV plant performance monitoring by means of unmanned aerial systems (UAS). Int. J. Energy Environ. Eng. 2015, 6, 47–54. [Google Scholar] [CrossRef]
- Davis, L.E.; McNerney, M.J.; Chow, J.; Hamilton, T.; Harting, S.; Byman, D. Armed and Dangerous? UAVs and US Security; RAND Corp.: Santa Monica, CA, US, 2014. [Google Scholar]
- Aragão, F.V.; Zola, F.C.; Marinho, L.H.N.; de Genaro Chiroli, D.M.; Junior, A.B.; Colmenero, J.C. Choice of unmanned aerial vehicles for identification of mosquito breeding sites. Geospat. Health 2020, 15, 92–100. [Google Scholar] [CrossRef]
- Kianian, B.; Kurdve, M.; Andersson, C. Comparing life cycle costing and performance part costing in assessing acquisition and operational cost of new manufacturing technologies. Procedia CIRP 2019, 80, 428–433. [Google Scholar] [CrossRef]
- Kim, D.; Lee, K.; Moon, I. Stochastic facility location model for drones considering uncertain flight distance. Ann. Oper. Res. 2019, 283, 1283–1302. [Google Scholar] [CrossRef]
- Figliozzi, M.A. Modeling the Sustainability of Small Unmanned Aerial Vehicles Technologies: Final Report; Portland State University: Portland, OR, USA, 2018. [Google Scholar]
- Jorge, L.A.; Brandão, Z.N.; Inamasu, R.Y. Insights and recommendations of use of UAV platforms in precision agriculture in Brazil. In Proceedings of the Remote Sensing for Agriculture, Ecosystems, and Hydrology XVI (Proc. of SPIE Vol. 9239), Amsterdam, The Netherlands, 12 November 2014. Paper ID: 923911. [Google Scholar] [CrossRef]
- Miari, B. A Qualitative Risk Assessment Applied Using SORA: UAV Technology Supporting Maintenance Operations on Rødsand II Offshore Wind Farm. Master Thesis, Risk and Safety Management, Aalborg University, Copenhagen, Denmark, 2018. [Google Scholar]
- Yu, S.H.; Kim, Y.K.; Jun, H.J.; Choi, I.S.; Woo, J.K.; Kim, Y.H.; Lee, J. Evaluation of Spray Characteristics of Pesticide Injection System in Agricultural Drones. J. Biosyst. Eng. 2020, 1–9. [Google Scholar] [CrossRef]
- Bouayed, Z.; Penney, C.E.; Sokri, A.; Yazbek, T. Estimating Maintenance Costs for Royal Canadian Navy Ships: A Parametric Cost Model; Defence Research and Development Canada: North York, ON, Canada, 2017. [Google Scholar]
- Dožić, S.; Kalić, M. An AHP approach to aircraft selection process. Transp. Res. Procedia 2014, 3, 165–174. [Google Scholar] [CrossRef]
- Gomes, L.F.A.M.; de Mattos Fernandes, J.E.; de Mello, J.C.C.S. A fuzzy stochastic approach to the multi-criteria selection of an aircraft for regional chartering. J. Adv. Transp. 2014, 48, 223–237. [Google Scholar] [CrossRef]
- Wang, N.; Liu, Y.; Fu, G.; Li, Y. Cost–benefit assessment and implications for service pricing of electric taxies in China. Energy Sustain. Dev. 2015, 27, 137–146. [Google Scholar] [CrossRef]
- Yeh, C.H.; Chang, Y.H. Modeling subjective evaluation for fuzzy group multi-criteria decision making. Eur. J. Oper. Res. 2009, 194, 464–473. [Google Scholar] [CrossRef]
- Woodward, D.G. Life cycle costing—Theory, information acquisition and application. Int. J. Proj. Manag. 1997, 15, 335–344. [Google Scholar] [CrossRef]
- iEduNote. Operating Costing: Definition, Classification of Operating Cost. Available online: https://www.iedunote.com/operating-costing (accessed on 18 February 2021).
- Chang, C.-T.; Chou, Y.-Y.; Zhuang, Z.-Y. A practical expected-value-approach model to assess the relevant procurement costs. J. Oper. Res. Soc. 2015, 66, 539–553. [Google Scholar] [CrossRef]
- Bressani-Ribeiro, T.; Almeida, P.G.S.; Volcke, E.I.P.; Chernicharo, C.A.L. Trickling filters following anaerobic sewage treatment: State of the art and perspectives. Environ. Sci. Water Res. Technol. 2018, 4, 1721–1738. [Google Scholar] [CrossRef]
- Nachimuthu, S.; Zuo, M.J.; Ding, Y. A decision-making model for corrective maintenance of offshore wind turbines considering uncertainties. Energies 2019, 12, 1408. [Google Scholar] [CrossRef]
- Hwang, H.; Prasad, C.R.; Serino, R.M. Lean-Sensing: Intelligent, Low-Cost, Remote Detection by Integrating Currently Available Components for Distant Early Warning. Hdiac J. 2015, 2, 15–20. [Google Scholar]
- Petkovics, I.; Simon, J.; Petkovics, Á.; Čović, Z. Selection of unmanned aerial vehicle for precision agriculture with multi-criteria decision-making algorithm. In Proceedings of the 2017 IEEE 15th International Symposium on Intelligent Systems and Informatics (SISY), Subotica, Serbia, 14–16 September 2017; pp. 151–156. [Google Scholar]
- Nur, F.; Alrahahleh, A.; Burch, R.; Babski-Reeves, K.; Marufuzzaman, M. Last mile delivery drone selection and evaluation using the interval-valued inferential fuzzy TOPSIS. J. Comput. Des. Eng. 2020, 7, 397–411. [Google Scholar]
- Ulukavak, M.; Miman, M. Selection of The Most Proper Unmanned Aerial Vehicle for Transportation in Emergency Operations by Using Analytic Hierarchy Process. Int. J. Environ. Geoinform. 2019, 8, 78–91. [Google Scholar] [CrossRef]
- Duque, L.; Seo, J.; Wacker, J. Synthesis of unmanned aerial vehicle applications for infrastructures. J. Perform. Constr. Facil. 2018, 32, 04018046. [Google Scholar] [CrossRef]
- Duque, L.; Seo, J.; Wacker, J. Timber bridge inspection using UAV. In Proceedings of the Structures Congress 2018: Bridges, Transportation Structures, and Nonbuilding Structures (ASCE), Reston, VA, USA, 19–21 April 2018; pp. 186–196. [Google Scholar]
- Hoyas Ester, I. STAMP project. Master Thesis, Universitat Politècnica de Catalunya, Barcelona, Catalunya, Spain, 2018. [Google Scholar]
- Cesnik, C.E.; Palacios, R.; Reichenbach, E.Y. Reexamined structural design procedures for very flexible aircraft. J. Aircr. 2014, 51, 1580–1591. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Xu, M. The coverage problem in UAV network: A survey. In Proceedings of the IEEE Fifth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Hefei, China, 11–13 July 2014; pp. 1–5. [Google Scholar]
- Ajanic, E.; Feroskhan, M.; Mintchev, S.; Noca, F.; Floreano, D. Bioinspired wing a and tail morphing extends drone flight capabilities. Sci. Robot. 2020, 5, eabc2897. [Google Scholar] [CrossRef]
- Yang, G.; Lin, X.; Li, Y.; Cui, H.; Xu, M.; Wu, D.; Redhwan, S.B. A telecom perspective on the internet of drones: From LTE-advanced to 5G. arXiv 2018, arXiv:1803.11048. [Google Scholar]
- Shakeri, R.; Al-Garadi, M.A.; Badawy, A.; Mohamed, A.; Khattab, T.; Al-Ali, A.K.; Guizani, M. Design challenges of multi-UAV systems in cyber-physical applications: A comprehensive survey and future directions. IEEE Commun. Surv. Tutor. 2019, 21, 3340–3385. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the sky: Leveraging UAVs for disaster management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Laszlo, B.; Agoston, R.; Xu, Q. Conceptual approach of measuring the professional and economic effectiveness of drone applications supporting forest fire management. Procedia Eng. 2018, 211, 8–17. [Google Scholar] [CrossRef]
- Restas, A. Drone applications for supporting disaster management. World J. Eng. Technol. 2015, 3, 316–321. [Google Scholar] [CrossRef]
- Aljehani, M.; Inoue, M. Performance evaluation of multi-UAV system in post-disaster application: Validated by HITL simulator. IEEE Access 2019, 7, 64386–64400. [Google Scholar] [CrossRef]
- Yıldırım, Ş.; Çabuk, N.; Bakırcıoğlu, V. Design and trajectory control of universal drone system. Measurement 2019, 147, 106834. [Google Scholar] [CrossRef]
- Amiri, N. Control of an Unconventional VTOL UAV for Complex Maneuvers; Graduate Studies, University of Calgary’s; University of Calgary: Calgary, Italy, 2013. [Google Scholar]
- Pai, N.S.; Zhou, Y.H.; Chen, P.Y.; Chen, W.L.; Chen, S.A. Realization of Person Tracking and Gesture Recognition with a Quadrotor System. Sens. Mater. 2019, 31, 2245–2262. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Y.; Li, B.; Ma, S. Current research, key performances and future development of search and rescue robots. Front. Mech. Eng. China 2007, 2, 404–416. [Google Scholar] [CrossRef]
- Bruno, G.; Esposito, E.; Genovese, A. A model for aircraft evaluation to support strategic decisions. Expert Syst. Appl. 2015, 42, 5580–5590. [Google Scholar] [CrossRef]
- See, T.K.; Gurnani, A.; Lewis, K. Multi-attribute decision making using hypothetical equivalents and inequivalents. J. Mech. Des. 2004, 126, 950–958. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, W.; Yingshuai, D.U.; Wu, Z.; Zhang, W.; Xuming, M.A.; Li, J. Aerial Cdznte Inspection System And Inspection Method. U.S. Patent Application No. 15/740,813, 4 October 2018. [Google Scholar]
- Pickett, S. Unmanned Aerial Vehicle Boosters. U.S. Patent Application No. 16/108,495, 26 November 2019. [Google Scholar]
- Liang, Y.; Xu, W.; Liang, W.; Peng, J.; Jia, X.; Zhou, Y.; Duan, L. Nonredundant information collection in rescue applications via an energy-constrained UAV. IEEE Internet Things J. 2018, 6, 2945–2958. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, M.; Wang, Z.; Zhang, X.; Zhang, G.; Gong, S.; Zhang, Y.; Wang, J.; Liu, L. Fully Protected Drone. U.S. Patent Application No. 15/117,829, 22 December 2016. [Google Scholar]
- Ng, M. Mobile Vehicle Charging System. U.S. Patent No. 10,207,591, 22 October 2019. [Google Scholar]
- Tang, Y.; Zhao, T.; Deng, L. Remote Controller and Handle Structure Thereof, and Method for Controlling a UAV. U.S. Patent No. 10,675,551, 9 June 2020. [Google Scholar]
- Zhou, M.; Zhou, Z.; Liu, L.; Huang, J.; Lyu, Z. Review of vertical take-off and landing fixed-wing UAV and its application prospect in precision agriculture. Int. J. Precis. Agric. Aviat. 2020, 3, 8–17. [Google Scholar]
- Xiao, X.; Guo, B.; Li, D.; Li, L.; Yang, N.; Liu, J.; Peng, Z. Multi-view stereo matching based on self-adaptive patch and image grouping for multiple unmanned aerial vehicle imagery. Remote Sens. 2016, 8, 89. [Google Scholar] [CrossRef]
- Mao, X.; Li, Y.; Cheng, J.; Zhang, Y. International Investment Strategies of Chinese High-Tech Company—In the Example of DJI’Four Flyings Strategy. In Proceedings of the 4th International Symposium on Business Corporation and Development in South-East and South Asia under B&R Initiative (ISBCD 2019), Kunming, China, 24 November 2019; pp. 193–198. [Google Scholar]
- Johnsen, S.O.; Evjemo, T.E. State of the art of unmanned aircraft transport systems in industry related to risks, vulnerabilities and improvement of safety. In Proceedings of the 29th European Safety and Reliability Conference (ESREL), Hannover, Germany, 22–26 September 2019. [Google Scholar]
- Roy, R.N.; Bovo, A.; Gateau, T.; Dehais, F.; Chanel, C.P.C. Operator engagement during prolonged simulated uav operation. Ifac-Pap. Line 2016, 49, 171–176. [Google Scholar] [CrossRef][Green Version]
- Gundlach, J. Designing unmanned aircraft systems: A comprehensive approach. In Proceedings of the American Institute of Aeronautics and Astronautics (AIAA), Manassas, VI, USA, 9–12 January 2012. [Google Scholar]
- Sadraey, M.H. Unmanned Aerial Vehicles Design Education; Techniques and Challenges. In Proceedings of the ASEE’s Virtual Conference, Virtual, 22–26 June 2020. Paper ID: 28664. [Google Scholar] [CrossRef]
- Hall, A.B. Conceptual and Preliminary Design of a Low-Cost Precision Aerial Delivery System; Naval Postgraduate School: Monterey, CA, USA, 2016. [Google Scholar]
- Candeloro, P.; Pagliaroli, T.; Ragni, D.; Di Francesco, S. Small-scale rotor aeroacoustics for drone propulsion: A review of noise sources and control strategies. Preprints 2019. [Google Scholar] [CrossRef]
- Jiang, H.; Zhou, T.; Fattah, R.J.; Zhang, X.; Huang, X. Multi-rotor noise scattering by a drone fuselage. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019; p. 2586. [Google Scholar]
- Soloiu, V.; Phillips, C.J.; Carapia, C.; Knowles, A.; Grall, D.; Smith, R. Exploratory Investigation of Combustion and NVH Signature of a Drone Jet Engine Fueled with IPK. In Proceedings of the AIAA SciTech 2021 Forum, Virtual, 19–21 January 2021; p. 1347. [Google Scholar]
- Gaynutdinov, R.R.; Chermoshentsev, S.F. Emission of electromagnetic disturbances from coupling paths of avionics unmanned aerial vehicles. In Proceedings of the IEEE 2017 International Siberian Conference on Control and Communications (SIBCON), Astana, Kazakhstan, 29–30 June 2017; pp. 1–5. [Google Scholar]
- Petrov, G.; Stancheva, A. Problems related to EMC caused by low-altitude flying drones in urban environment. Electrotech. Electron. (E+E) 2020, 55, 1–7. [Google Scholar]
- Metzler, C.D.F. Logistics in the Contact Layer. Marine Corps Gazette, 20 May; 18–24.
- Muliadi, J.; Kusumoputro, B. Neural network control system of UAV altitude dynamics and its comparison with the PID control system. J. Adv. Transp. 2018, 3823201. [Google Scholar] [CrossRef]
- Edgell, J.; Spangler, S.K.; Dragoo, G.F.; Jackson, L.W. Logistics in 2025: Consider It Done! Department of Defence: Washington, DC, USA, 1996. [Google Scholar]
- Rashidi, S.; Karimi, N.; Mahian, O.; Esfahani, J.A. A concise review on the role of nanoparticles upon the productivity of solar desalination systems. J. Therm. Anal. Calorim. 2019, 135, 1145–1159. [Google Scholar] [CrossRef]
- Zhai, S.; Bai, B. A Time Service Improvement Scheme for Clock System of Nuclear Power Plant. Int. J. Comput. Electr. Eng. 2014, 6, 501. [Google Scholar] [CrossRef][Green Version]
- Dingning, L.; Qiong, D. Point Cloud Processing System Development Based on PCL and Qt. Int. J. Eng. Manag. 2019, 3, 33. [Google Scholar] [CrossRef]
- Zhao, J.; Zhuang, Z.; Hu, H.; Hao, M.; Peng, Y.; Zhang, W.; Xu, S. Container-Type Data Center. U.S. Patent Application No. 12/963,129, 25 May 2010. [Google Scholar]
- Adebimpe, O.A.; Oladokun, V.; Charles-Owaba, O.E. Preventive maintenance interval prediction: A spare parts inventory cost and lost earning based model. Eng. Technol. Appl. Sci. Res. 2015, 5, 811–817. [Google Scholar] [CrossRef]
- Dellar, C.; Morris, T.; Hendrikse, N.; Wainscott, K. Spare Parts and Consumables Management System. U.S. Patent Application No. 09/956,586, 20 March 2003. [Google Scholar]
- Oliva, R.; Kallenberg, R. Managing the transition from products to services. Int. J. Serv. Ind. Manag. 2003, 14, 160–172. [Google Scholar] [CrossRef]
- Goodman, C.M. The Delphi technique: A critique. J. Adv. Nurs. 1987, 12, 729–734. [Google Scholar] [CrossRef]
- Woudenberg, F. An evaluation of Delphi. Technol. Forecast. Soc. Change 1991, 40, 131–150. [Google Scholar] [CrossRef]
- Linstone, H.A.; Turoff, M. The Delphi Method; Addison-Wesley Publishing: Boston, MA, USA, 1975. [Google Scholar]
- Turoff, M.; Linstone, H.A. The Delphi Method: Techniques and Applications; Advanced Book Program; Addison-Wesley Publishing: Boston, MA, USA, 2002. [Google Scholar]
- Saaty, T.L. A scaling method for priorities in hierarchical structures. J. Math. Psychol. 1977, 15, 234–281. [Google Scholar] [CrossRef]
- Zhuang, Z.-Y.; Yang, L.-W.; Lee, M.-H.; Wang, C.-Y. ‘MEAN+ R’: Implementing a web-based, multi-participant decision support system using the prevalent MEAN architecture with R based on a revised intuitionistic-fuzzy multiple attribute decision-making model. Microsyst. Technol. 2018, 24, 4291–4309. [Google Scholar] [CrossRef]
- Saaty, T.L. Decision Making with the Analytic Hierarchy Process. Int. J. Serv. Sci. 2008, 1, 83–98. [Google Scholar] [CrossRef]
- Zhuang, Z.-Y.; Chang, S.-C. Another empirical application of the Similarity Confirmation Method in evaluating the MADM methods for a type-selection decision case before bulk purchase. In Proceedings of the 11th Annual International Conference on Industrial Engineering and Operations Management (IOEM 2021), Singapore, 7–11 March 2021; ISBN 978-1-7923-6124-1. [Google Scholar]
- Ferro, E.; Gennaro, C.; Nordio, A.; Paonessa, F.; Vairo, C.; Virone, G.; Bragagnini, A. 5G-Enabled Security Scenarios for Unmanned Aircraft: Experimentation in Urban Environment. Drones 2020, 4, 22. [Google Scholar] [CrossRef]
- Rodríguez-Puerta, F.; Ponce, R.A.; Pérez-Rodríguez, F.; Águeda, B.; Martín-García, S.; Martínez-Rodrigo, R.; Lizarralde, I. Comparison of Machine Learning Algorithms for Wildland-Urban Interface Fuel-break Planning Integrating ALS and UAV-borne LiDAR Data and Multispectral Images. Drones 2020, 4, 21. [Google Scholar] [CrossRef]
- Gorkin, R.; Adams, K.; Berryman, M.J.; Aubin, S.; Li, W.; Davis, A.R.; Barthelemy, J. Sharkeye: Real-time autonomous personal shark alerting via aerial surveillance. Drones 2020, 4, 18. [Google Scholar] [CrossRef]
- Srivastava, K.; Pandey, P.C.; Sharma, J.K. An Approach for Route Optimization in Applications of Precision Agriculture Using UAVs. Drones 2020, 4, 58. [Google Scholar] [CrossRef]
- Chatziparaschis, D.; Lagoudakis, M.G.; Partsinevelos, P. Aerial and Ground Robot Collaboration for Autonomous Mapping in Search and Rescue Missions. Drones 2020, 4, 79. [Google Scholar] [CrossRef]
- Sigala, A.; Langhals, B. Applications of Unmanned Aerial Systems (UAS): A Delphi Study Projecting Future UAS Missions and Relevant Challenges. Drones 2020, 4, 8. [Google Scholar] [CrossRef]
- Zhuang, Z.Y.; Vincent, F.Y. Analyzing the effects of the new labor law on outpatient nurse scheduling with law-fitting modeling and case study. Expert Syst. Appl. 2021, 180, 115103. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| For Civilian Use | |
|---|---|
| Aerial photography | Film, video, and stills |
| Agriculture crops | Monitoring and spraying, herd monitoring, and cattle driving |
| Coastguard | Search and rescue; coastline and sea-lane monitoring |
| Conservation | Pollution and land monitoring |
| Customs and excise | Surveillance for illegal imports |
| Electricity companies | Power line inspection |
| Fire services and forestry | Fire detection and incident control |
| Fisheries | Fisheries protection |
| Gas and oil supply companies | Land survey and pipeline security |
| Information services | News, pictures, and featured pictures, e.g., wildlife |
| Lifeboat institutions | Incident investigation, guidance, and control |
| Local authorities | Survey and disaster control |
| Meteorological services | Sampling and analysis of atmosphere for forecasting |
| Traffic agencies | Monitoring and control of road traffic |
| Oil companies | Pipeline security |
| Ordinance survey | Aerial photography for mapping |
| Police authorities | Search for missing persons, security, and incident surveillance |
| River authorities | Water course level monitoring and flood and pollution control |
| Survey organizations | Geographical, geological, and archaeological surveys |
| Water boards | Reservoir and pipeline monitoring |
| Classification | Weight | Normal Operating Altitude | Radius of Mission | Endurance | Normal Employment | Typical Uses |
|---|---|---|---|---|---|---|
| Mirco | <2 KG | Up to 200 ft | 5 KM | Few hours | Tactical platoon (single operator) | R, I, S |
| Mini | 2~20 KG | Up to 3000 ft | 25 KM | Up to 2 days | Tactical subunit (manual launch) | S, DG |
| Small | 20~150 KG | Up to 5000 ft | 50 KM | Up to 2 days | Tactical unit (employs launch system) | S, DG |
| Tactical | 150~600 KG | Up to 10,000 ft | 200 KM | Up to 2 days | Tactical formation | S, DG |
| MALE | >600 KG | Up to 45,000 ft | Unlimited | Days/weeks | Operational/Theatre | S, CT |
| HALE | >600 KG | Up to 65,000 ft | Unlimited | Days/weeks | Strategy/National | S, DG, SR |
| Strike/Combat | >600 KG | Up to 65,000 ft | Unlimited | Days/weeks | Strategy/National | S, DG, SR |
| Weight (kg) | Normal Operating Altitude (ft.) | Mission Radius (km) | Endurance (hrs) | Representative UAV |
|---|---|---|---|---|
| <2 | <400 | 5 | <1 | Black Widow, Raven |
| 2~25 | <3000 | 25 | 2–8 | Aerosonde, Scan Eagle, Puma |
| 25~150 | <5000 | 50 | 4–12 | Manta B |
| 150~600 | <10,000 | 200–500 | 8–14 | SIERRA, Viking 400, Tiger Shark |
| >600 | <18,000 | 1000 | >20 | Ikhana (Predator B) |
| >600 | >18,000 | 5000 | >24 | Global Hawk |
| Category | I | II | III |
|---|---|---|---|
| Weight | <=55 lb (25 KG) | 55–330 lb (25–150 KG) | >330 lb (150 KG) |
| Airspeed (kt) | <=70 | <=200 | >200 |
| Type | Model or sUAS | sUAS | UAS |
| Category | Feature Description |
|---|---|
| NAV (Nano Air Vehicles) | NAV are recommended for radar obfuscation or ultra-short-range monitoring if the camera, propulsion, and control subsystem can be small enough. |
| MAV (Micro UAV) | MAV were originally defined as a drone with a wingspan of no more than 150 mm. MAV are mainly used for operations in urban environments, especially when flying slowly in buildings, preferably stopping to sit on walls or columns. Micro-aircraft usually need to be launched manually because they are very susceptible to atmospheric turbulence, so the payload of a fixed-wing aircraft is very low. Such problems may exist in all types of MAV. |
| MUAV (Mini UAV) | Most of them refer to UAV that are less than a certain mass. They may be less than 20 kg, but they are not as small as micro-UAV. They can be launched manually and fly about 30 km at most. They are used by mobile battle groups and also for various civilian purposes. |
| Close-Range UAV | Usually, mobile forces use these drones to perform relatively simple military operations and a variety of civilian purposes. They typically execute a range of approximately 100 km and perform tasks such as reconnaissance, targeting, surveillance, airport security, ship-to-shore surveillance, power line inspection, crop spraying, and traffic monitoring. |
| TUAV (Medium-range/Tactical UAV) | Its operation range is from 100 to 300 km; compared to HALE and MALE, these drones are smaller and have a simpler control; they could be operated primarily by the Army and Navy. |
| MALE UAV (Medium-altitude long-endurance UAVs) | Its flight altitude is between 5000 and 15,000 m and its endurance time is 24 h. It functions like a HALE system, but it usually runs in a shorter range that still exceeds 500 km. It needs to operate at a fixed base. |
| HALE UAV (High-altitude long-endurance UAV) | Its flight altitude is more than 15,000 m; its endurance time is over 24 h. It can perform extremely long-range reconnaissance and surveillance. It is a trend for HALEs to arm them with weapons. Usually, the Air Force operates them at fixed bases. |
| Criterion | Operational Definition |
|---|---|
| Purchase cost | The cost of purchase of drone flight vehicles, manipulation devices, and devices required to perform related applications. |
| Operation cost | The costs of using drones to perform related missions, such as the cost of flying power such as fuel and electricity, the cost of mission-related consumables, and the costs that may be involved in the use of landing sites. |
| Maintenance cost | The cost of maintenance and replacement of components for the flight vehicle and primary equipment that ensure the proper operation of a drone. |
| Vehicle flight performance | The critical flight performance considerations of a drone include flight speed, range, endurance, flight altitude, payload, and take-off and landing way. |
| Manipulative ability | The important considerations of a drone manipulation performance include operation range and distance, manipulation agility and stability, operation interface, and anti-interference of wireless control signal. |
| Flight power | The types of drone flight power include fuel, electricity, hybrid fuel and electricity, solar energy, and other possible power; different power systems have a relative impact on the flight performance of a drone. |
| Main application | The main applications of drones include logistics and transportation, agricultural plant protection, surveillance and security, geographic mapping, and aerial photography and performance. |
| Operation duration | The duration of time to perform the main application, such as spraying, monitoring, shooting, etc. |
| Operation convenience | The convenience of drone operation is restricted by the flight vehicle take-off and landing field and the open condition of the operating airspace also affects the convenience of drone operation. |
| Operation safety and security | Drone operations should consider the safety and security of flight and personnel. |
| Operation supportability | Related support required for drone operations, such as flight logistics support, hardware and software support for related equipment required to perform tasks, etc. |
| Operation environmental impact | The possible impact of drone operation on the surrounding environment, such as noise, pollution from fuel exhaust, electromagnetic wave emission, etc. |
| Maintenance simplicity | The maintenance simplicity of drone flight vehicles and related equipment means that maintenance personnel can easily repair drone flight vehicles and related equipment through modular components. |
| Maintenance convenience | The maintenance convenience of drone flight vehicles and related equipment means that the suppliers of drone flight vehicles and related equipment provide relevant maintenance and maintenance support in close and convenient. |
| Acquisition of parts and operation consumables | Drone flight vehicle and related equipment components and related consumables needed for operation are not in short supply. |
| Type | #DMs | Percentage | |
|---|---|---|---|
| Gender | Male | 24 | 88.89% |
| Female | 3 | 11.11% | |
| Degree | Master’s | 14 | 51.85% |
| Ph.D. | 13 | 48.15% | |
| Group of Expert | I: Industry | 9 | 33.33% |
| A: Academy | 9 | 33.33% | |
| R: R&D Institute | 9 | 33.33% | |
| Age | 31–40 | 7 | 25.93% |
| 41–50 | 11 | 40.74% | |
| 51–65 | 9 | 33.33% | |
| Years in Service | 1–10 | 5 | 18.52% |
| 11–20 | 12 | 44.44% | |
| >21 | 10 | 37.04% |
| Construct | Criterion | Industry | Academia | Research | SRD * | ARD * |
|---|---|---|---|---|---|---|
| Cost | Purchase cost | 9 | 14 | 12 | 10 | |
| Operation cost | 10 | 12 | 10 | 4 | 10 | |
| Maintenance cost | 2 | 10 | 4 | 16 | ||
| Performance and application | Vehicle flight performance | 3 | 2 | 2 | 2 | |
| Manipulative ability | 4 | 1 | 6 | 10 | 8.4 | |
| Flight power | 6 | 6 | 8 | 4 | ||
| Main application | 8 | 5 | 1 | 14 | ||
| Operation duration | 1 | 4 | 7 | 12 | ||
| Operation | Operation convenience | 13 | 9 | 14 | 10 | |
| Operation safety and security | 7 | 3 | 5 | 8 | ||
| Operation supportability | 14 | 10 | 11 | 8 | 7.5 | |
| Operation environmental impact | 15 | 13 | 15 | 4 | ||
| Maintenance | Maintenance simplicity | 11 | 8 | 9 | 6 | |
| Maintenance convenience | 12 | 15 | 13 | 6 | ||
| Acquisition of parts and operation consumables | 5 | 6 | 3 | 6 | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, C.-H.; Tsao, M.-W.; Chi, L.-P.; Zhuang, Z.-Y. On the Dominant Factors of Civilian-Use Drones: A Thorough Study and Analysis of Cross-Group Opinions Using a Triple Helix Model (THM) with the Analytic Hierarchy Process (AHP). Drones 2021, 5, 46. https://doi.org/10.3390/drones5020046
Fu C-H, Tsao M-W, Chi L-P, Zhuang Z-Y. On the Dominant Factors of Civilian-Use Drones: A Thorough Study and Analysis of Cross-Group Opinions Using a Triple Helix Model (THM) with the Analytic Hierarchy Process (AHP). Drones. 2021; 5(2):46. https://doi.org/10.3390/drones5020046
Chicago/Turabian StyleFu, Chen-Hua, Ming-Wen Tsao, Li-Pin Chi, and Zheng-Yun Zhuang. 2021. "On the Dominant Factors of Civilian-Use Drones: A Thorough Study and Analysis of Cross-Group Opinions Using a Triple Helix Model (THM) with the Analytic Hierarchy Process (AHP)" Drones 5, no. 2: 46. https://doi.org/10.3390/drones5020046
APA StyleFu, C.-H., Tsao, M.-W., Chi, L.-P., & Zhuang, Z.-Y. (2021). On the Dominant Factors of Civilian-Use Drones: A Thorough Study and Analysis of Cross-Group Opinions Using a Triple Helix Model (THM) with the Analytic Hierarchy Process (AHP). Drones, 5(2), 46. https://doi.org/10.3390/drones5020046