
Hybrid LoRa-IEEE 802.11s Opportunistic Mesh Networking for Flexible UAV Swarming




Abstract
1. Introduction
2. State-of-the-Art
3. Disjoint IEEE 802.11s and LoRa-Based Wireless Mesh Networking
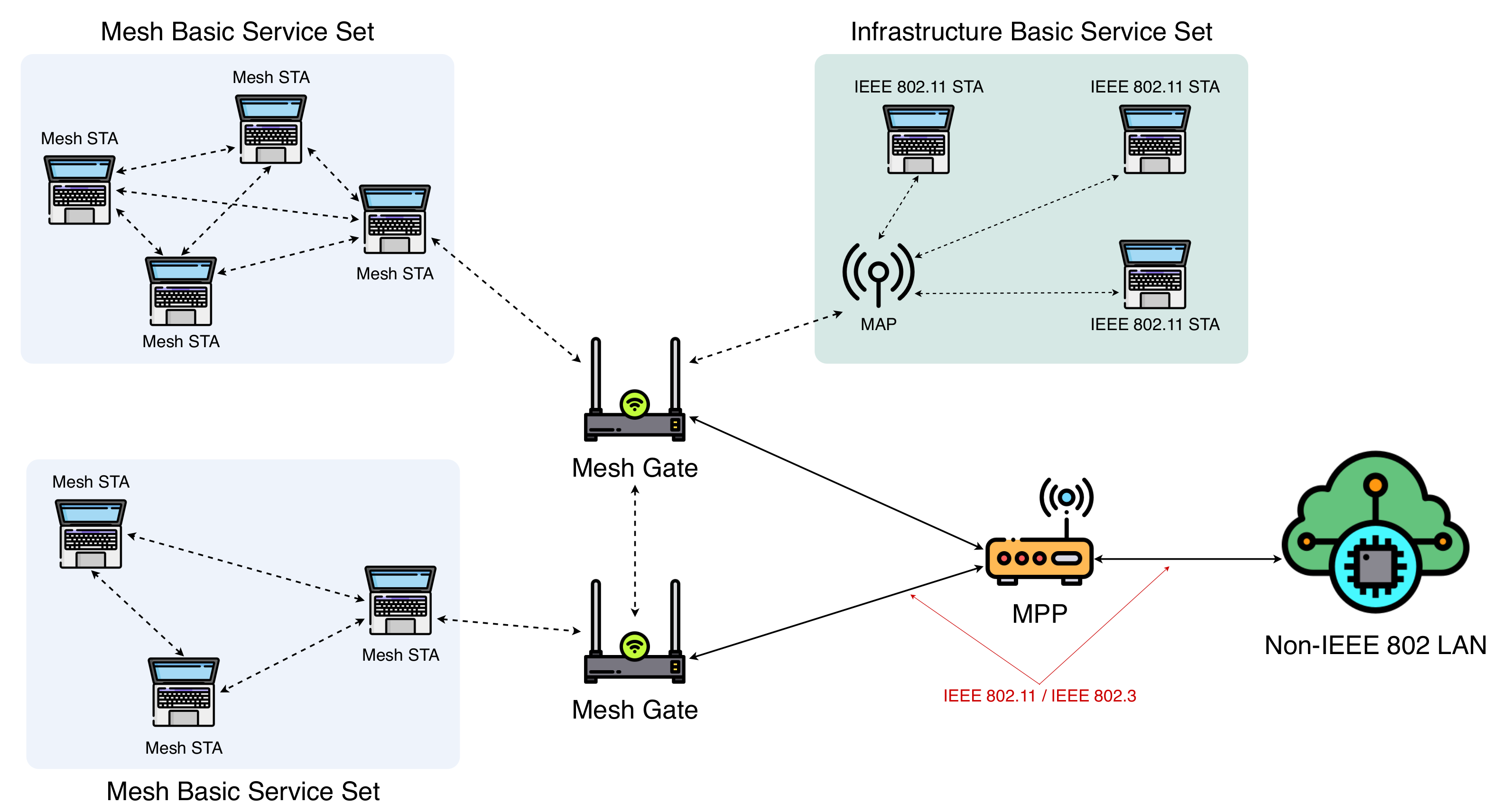
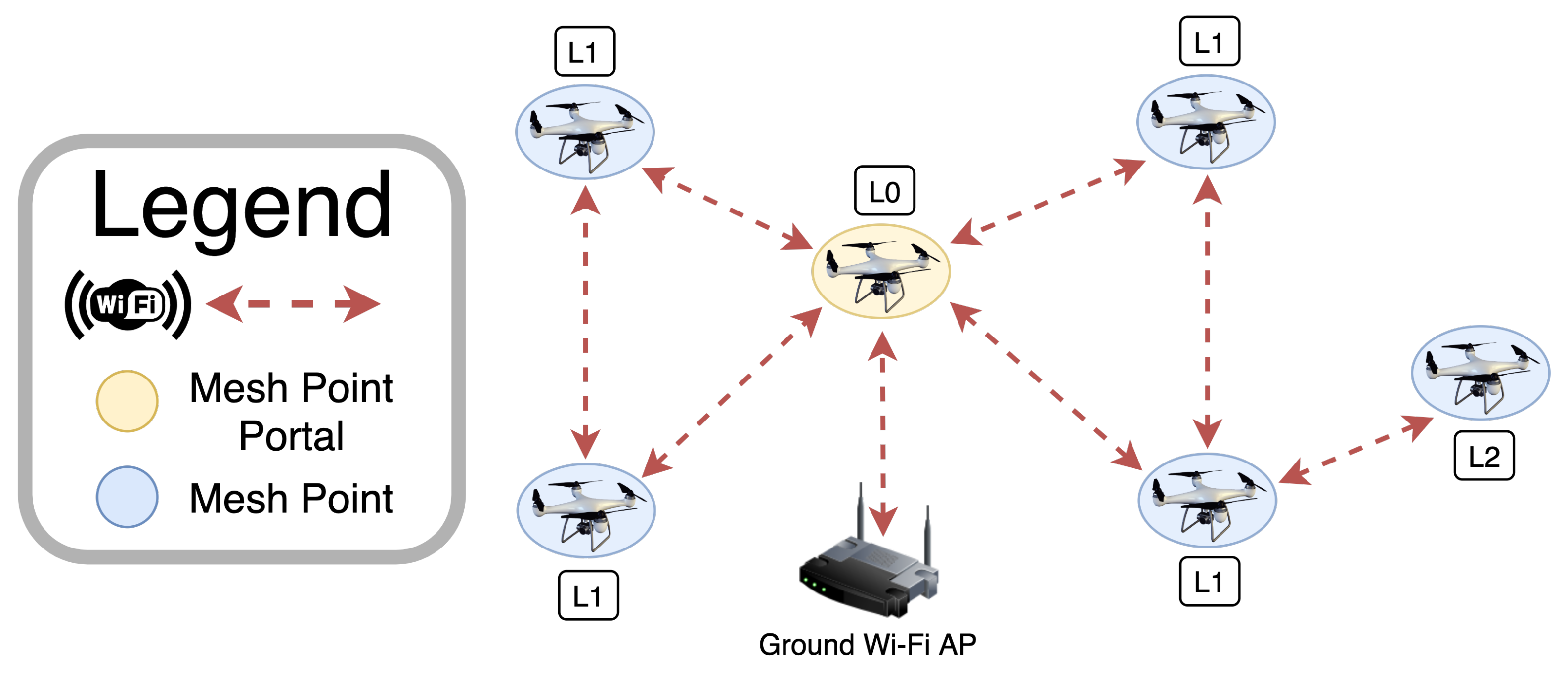
3.1. IEEE 802.11s Mesh Protocol
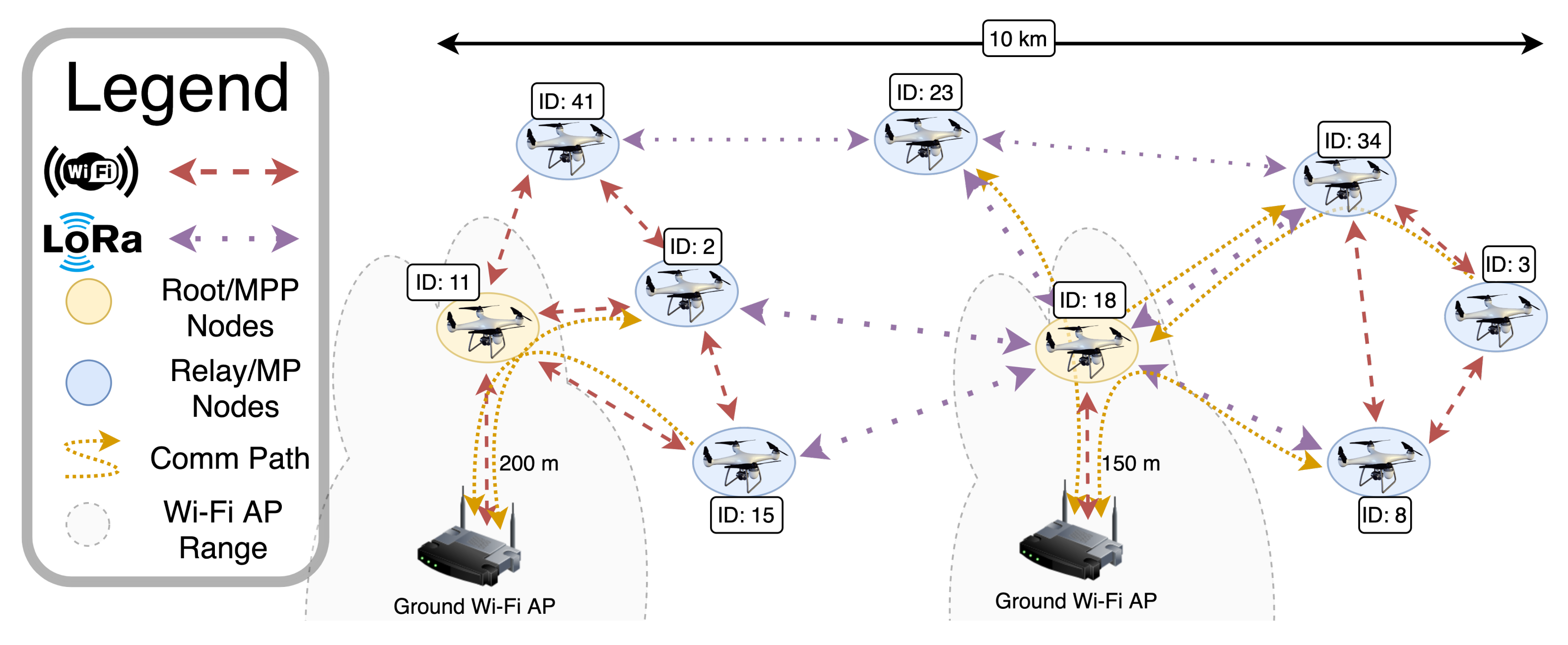
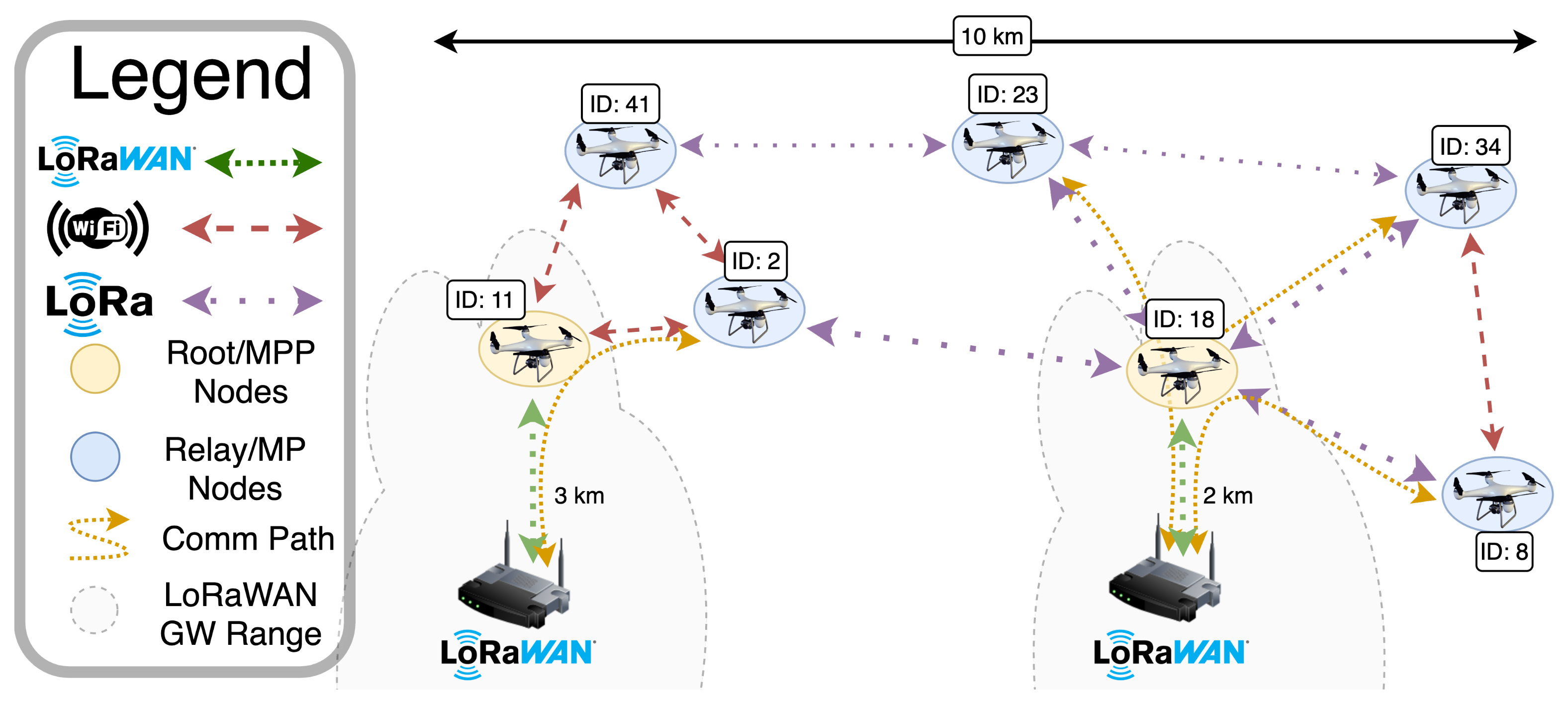
- one (or more) root nodes at and connected to the Internet (e.g., through a terrestrial Wi-Fi AP, a LoRaWAN network interface, or a UAV with an on-board LTE cellular network connection);
- one (or more) intermediate nodes connected to an upper-layer node (e.g., at , an upper layer is one of the available root nodes located at ) and, in turn, providing connectivity to lower-layer intermediate nodes, also denoted as “leaf” nodes;
- one (or more) leaf nodes, exploiting the network connectivity offered by upper-layer intermediate nodes and not acting as relays for any other UAV.
3.2. LoRa and LoRaWAN Protocols
3.2.1. LoRa Protocol
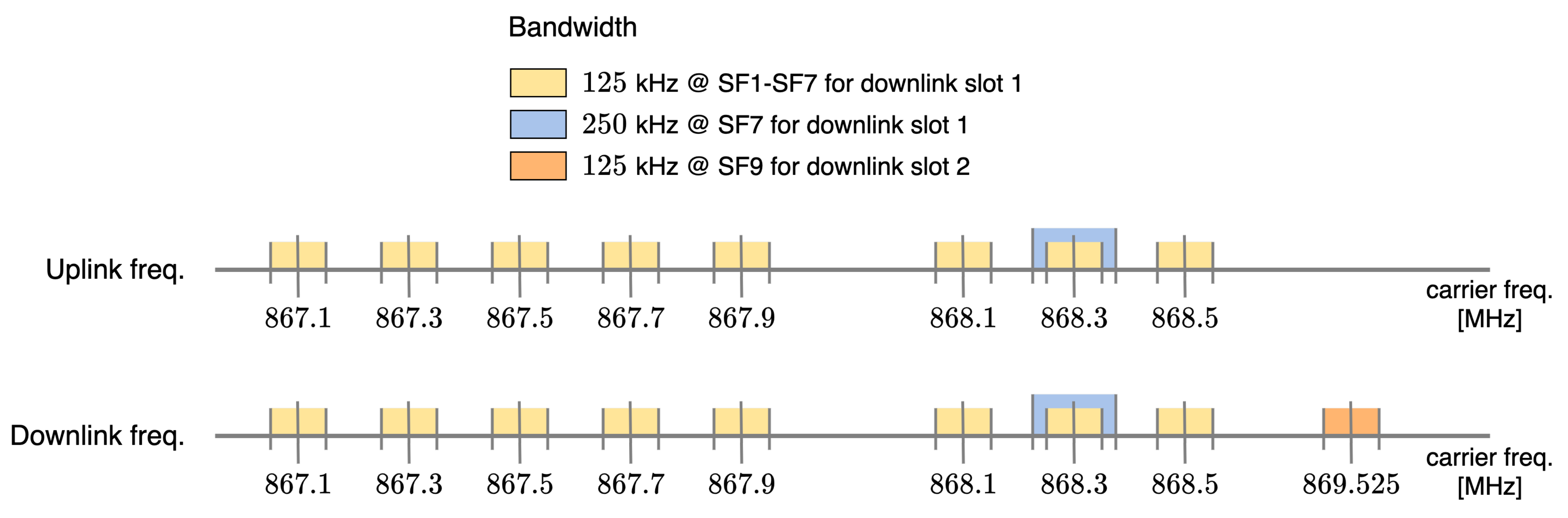
- Carrier Frequency (CF), used for both transmission and listening operations and depending on the operational region: in Europe, the LoRa operational CF is the EU 863–870 MHz ISM band, while in US, the 902–928 MHz ISM band is used.
- Bandwidth (BW), representing the width of the power spectrum density of LoRa RF signal. It is typically set to 125 kHz, but can be increased up to 250 kHz or even 500 kHz in some regions by setting specific modulations parameters.
- Coding Rate (CR), defining the Forward Error Correction (FEC) rate of the channel code used at the PHY layer in order to limit the detrimental impact of RF interference. In particular, it affects the symbol airtime: decreasing the CR increases the symbol overhead (the control redundancy increases) and extends the transmission airtime. The default value of the CR is equal to 4/5.
- Spreading Factor (SF), representing the chirp spreading parameter and defining how many chirps are sent per second. It ranges from SF7 and SF12. In detail, a large SF increases the symbol airtime and the energy consumption, thus improving the communication range but reducing the available data rate and the messages’ payload size [47].
- Transmission Power (TP), identifying the energy irradiated by the LoRa node’s antenna. It can range from −4 dBm to +20 dBm, but different regions could have different power limits (for example, in Europe, the upper bound is +14 dBm).
- Chirp Polarity (IQ), defining the polarity of the transmitted chirps. In detail, the polarity is often defined by the specific protocol implementation (e.g., LoRaWAN GWs transmit packets to end nodes using an inverted polarity modulation, so that these messages are discarded by neighbor GWs, while end devices transmit packets using non-inverted polarity in order to be received by multiple GWs).
- Sync Word, a 1-byte value parameter defined by the last two up-chirps of the LoRa’s Preamble and used to differentiate LoRa networks using the same frequency bands [48]. Therefore, any device configured with a given Sync Word will discard any incoming transmission if the Sync Word does not match its own. More precisely, default values assumed by the Sync Word byte value for private LoRa networks are 0x12 for Semtech SX127x devices and 0x1424 for SX126x devices; instead, public LoRa networks (such as LoRaWAN or The Things Network, TTN [7]) will be represented by values equal to 0x34 for Semtech SX127x devices and to 0x3444 for SX126x devices [49].
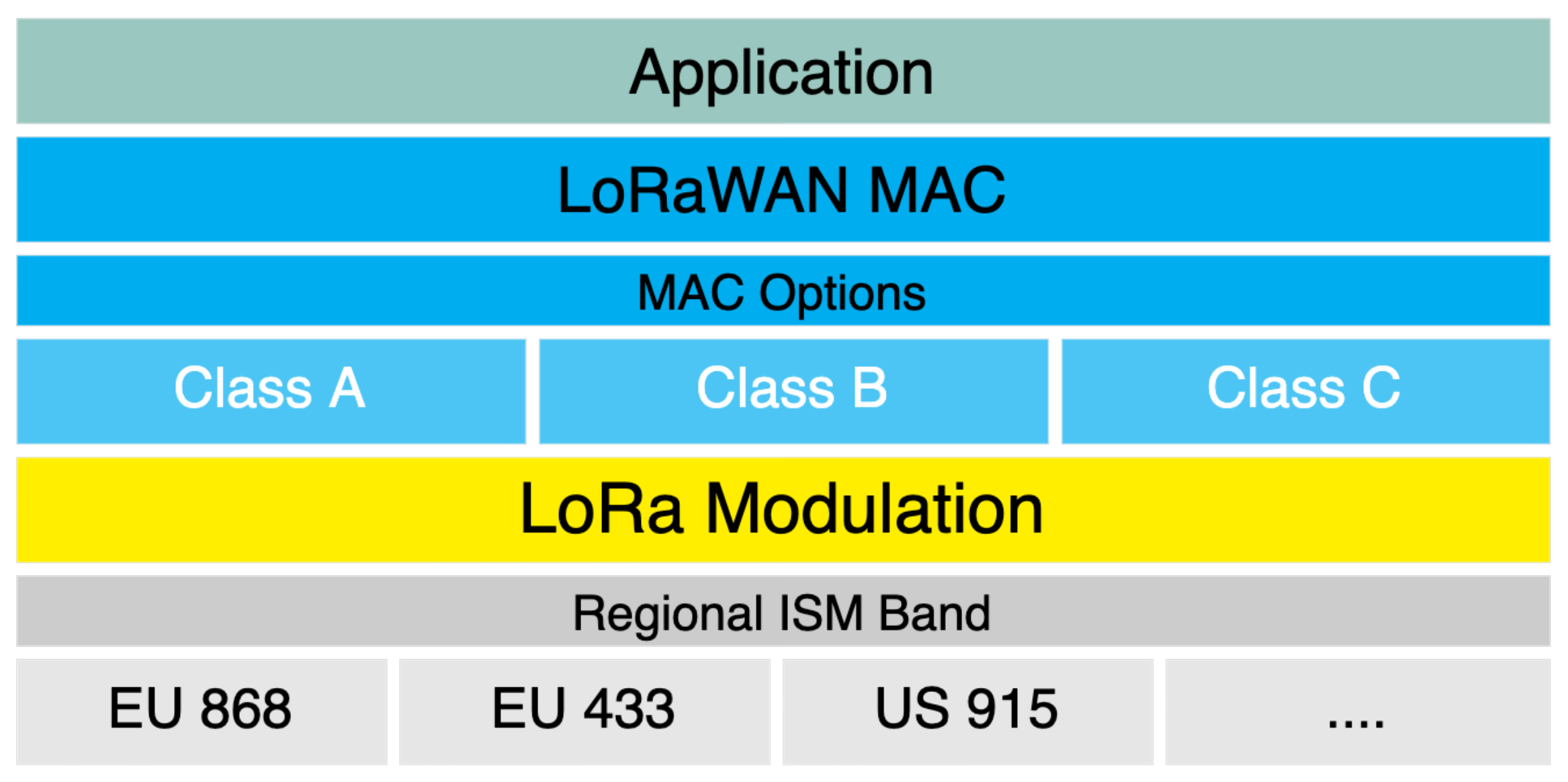
3.2.2. LoRaWAN Protocol
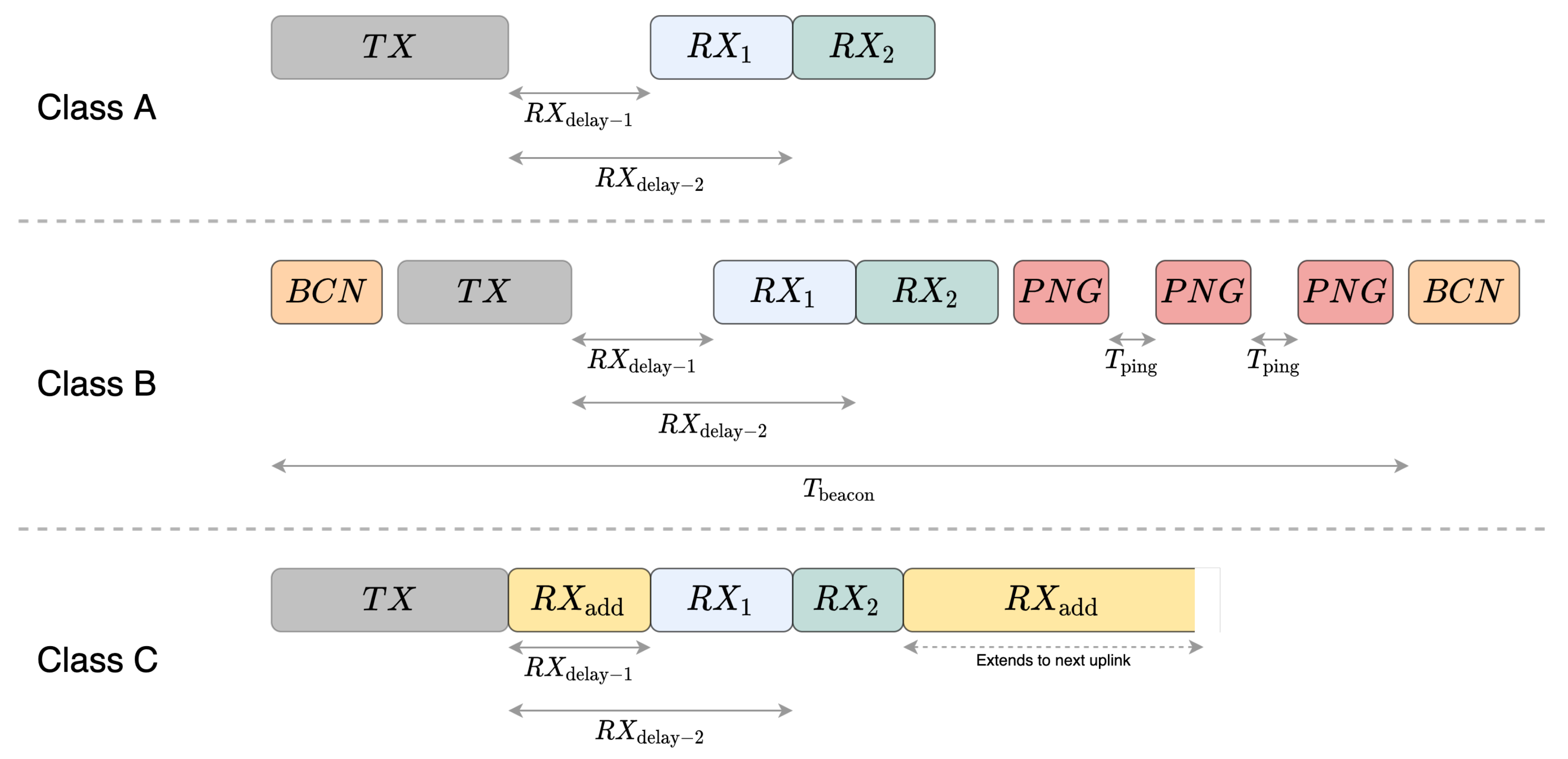
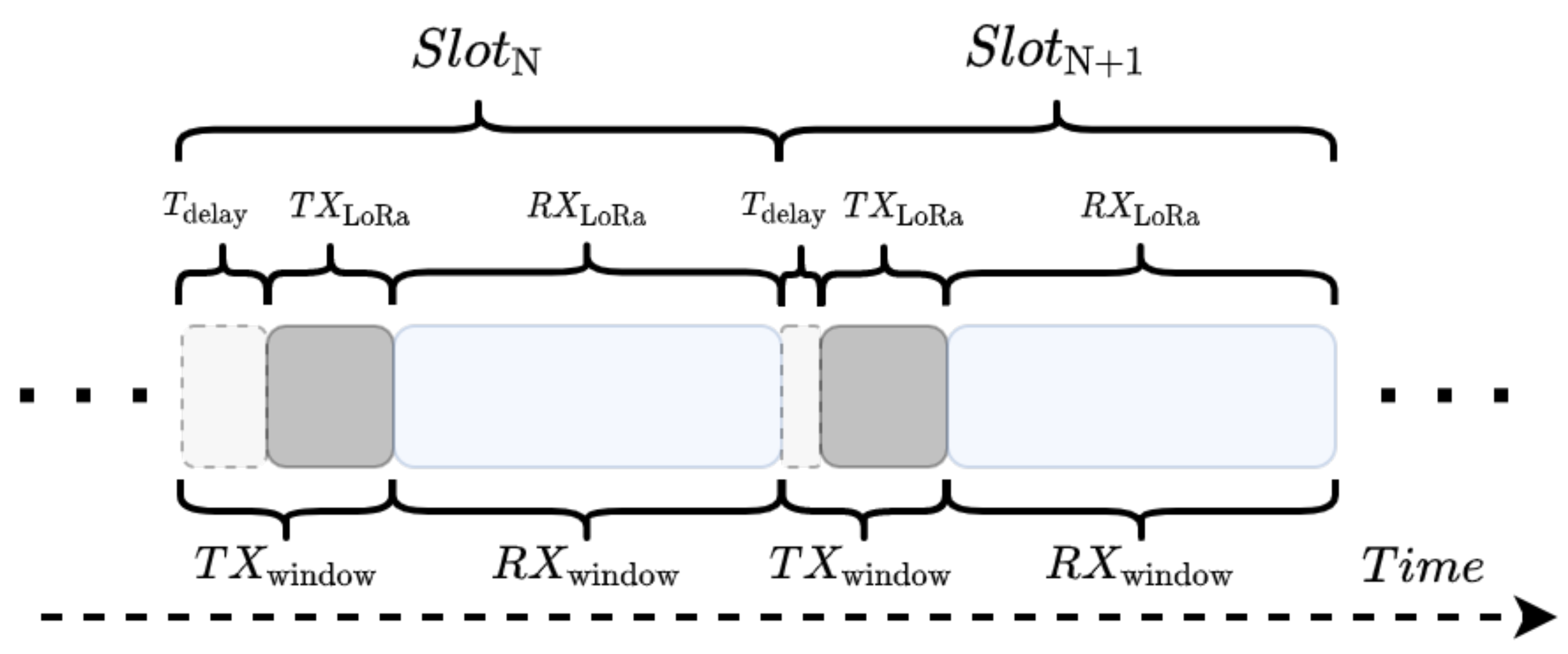
- Class A devices should support bidirectional communication but with a specific limitation: uplink (transmit) messages can be sent at any time by the end device, while downlink (receive) messages can be received only during two specific reception windows at specific time instants (just after an uplink transmission) before going back to sleep, as shown at the top of Figure 4. More in detail, after a first time interval after the end of the uplink transmission interval , a Class A device will open a short receive window listening to the same frequency band used to transmit (uplink) the previous message. Then, if no downlink message is received during this interval, the end device opens a second receive window () after a second fixed time interval (calculated from the end of ) on a specific frequency band known by the end devices and gateways [51]. However, it is noteworthy to highlight that, despite and being generally set to 1 s and 2 s, respectively, they may assume region-specific values and can be configured by the LoRaWAN network operator [52]. Class A end devices guarantee the lowest energy consumption.
- Class B devices are suitable for more downlink-demanding activities, since additional regularly scheduled, fixed-time receive windows are defined in the LoRaWAN network in addition to those of Class A, as shown in the middle of Figure 4. More in detail, a time-synchronized beacon is broadcast periodically by the network via the LoRaWAN GWs, and Class B end devices must periodically receive one of these s in order to align their internal clock with the LoRaWAN NS—beacons are transmitted by LoRaWAN GWs every s, with this beaconing period representing a tradeoff between GW transmit duty cycle’s minimization and end device’s power consumption [53]. Therefore, on the basis of the beacon timing reference, Class B devices can periodically open additional receive windows defined as ping slots (s), any of which may be used by the LoRaWAN NS to initiate a downlink communication and with a ping slot periodicity s.
- Class C devices are appropriate for downlink-intensive scenarios, keeping their reception windows open unless they are transmitting—this strongly increases their power consumption but offers the lowest latency for communication between LoRaWAN NS and end devices. As a side effect, the use of portable batteries for Class C devices is typically unfeasible. We remark that a LoRaWAN end device cannot simultaneously belong to Class B and Class C [54]. More in detail, Class C end devices perform as Class A ones—implementing the same receive windows and —keeping, however, their window open until their next uplink window: this allows Class C devices to receive downlink messages during their window at almost any time. Finally, between the end of and the beginning of , an additional short receive window (at the frequency and data rate) is also opened.
- any LoRaWAN-enabled device has a daily maximum cumulative airtime of 30 s for uplink messages;
- any LoRaWAN-enabled device has a maximum of 10 daily downlink messages (including also acknowledgment (ACK) messages).
4. Proposed Hybrid Mesh Network
4.1. IEEE 802.11s Mesh Network Layer Implementation
4.2. Proposed LoRa-Based Access and Mesh Networking
- SF7 allows us to maximize the payload size: 222 bytes for LoRaWAN and 240 bytes for LoRa communications.
- SF7 guarantees the highest bitrate and the shortest symbol airtime, thus minimizing effective channel utilization rate and packet collisions and maximizing the number of operating devices and, therefore, exchanged messages.
- SF7 is particularly suited for mobile devices equipped with LoRa-enabled radio transceivers, such as flying UAVs (typically flying in a speed range between 20 km/h and 70 km/h, and is less affected by the Doppler shift effect [59]). Oppositely, higher SFs (e.g., SF12) are more affected by the Doppler shift effect, in particular at speeds higher than 40 km/h, where the higher packet loss makes the communication unreliable.
- SF7 represents the best choice even considering that the duty cycle policy defined for the EU 863–870 MHz band [57] requires that each transmission act is followed by an off-period without any new transmission. Given that this off-period heavily depends on the transmission airtime, then the chosen SF has an important role: SF7 has the lowest off-period between consecutive messages, given the lower symbol time.
4.2.1. LoRa-Based UAV-to-UAV Mesh Communication
- Broadcast the UAV’s position data (GNSS) and ground connection status (if any): these data are needed to create a robust mesh network (both with IEEE 802.11s and LoRa) and to evaluate the position of nearby moving UAVs and their ground connections (if available) in order to establish which will be the next node in the case of link failure or out-of-range position.
- Transmit content data and LoRa mesh configuration data: the first are data sent from a UAV toward another UAV in the swarm—thus an addressing mechanism is needed inside the swarm—or to the ground control center, while the second are essential data for mesh configuration (e.g., nearby nodes for each UAV, paths, etc.) that should be updated upon a change in the surrounding environment (given the mobile nature of the system).
- : a 1-byte unique identifier of the UAV, able to identify up to 256 entities. In our proposed solution, only 254 identifiers can be used, since values 0 and 255 are reserved for specific uses.
- : a 1-byte identifier indicating the ground connection of the node, if available. In detail, it can assume the following values:
- -
- 0 (default value), if the node is not connected to the ground;
- -
- 1, if the node is connected to the ground through an IEEE 802.11s AP;
- -
- 2, if the node is connected to the ground through a LoRaWAN link; and
- -
- 3, if the node is connected to the ground through an intermediate IEEE 802.11s AP on-board a nearby UAV.
- : a 10-byte field, in detail containing the latitude (, 4 bytes), the longitude (, 4 bytes), and the auxiliary altitude (, 2 bytes), encoded as float and short int.
- : similarly to the field, it is a 1-byte unique identifier representing a preliminary field needed for data transmissions between flying UAVs (both unicast and broadcast) and to the ground center and able to assume only 254 values (0 refers to the ground control center, while 255 refers to a broadcast communication between all flying UAVs).
- : a variable-size field ( bytes) containing different information, such as (i) the number of hops crossed by the messages, (ii) the last hop identifier, and (iii) other parameters needed to update the created LoRa mesh network.
- : a variable-size field ( bytes, given the LoRaWAN constraints at SF7) representing the actual data payload that a UAV needs to transmit to other UAVs.
4.2.2. UAV-to-Ground Communications through LoRaWAN
4.2.3. LoRa and LoRaWAN Communications Deployment
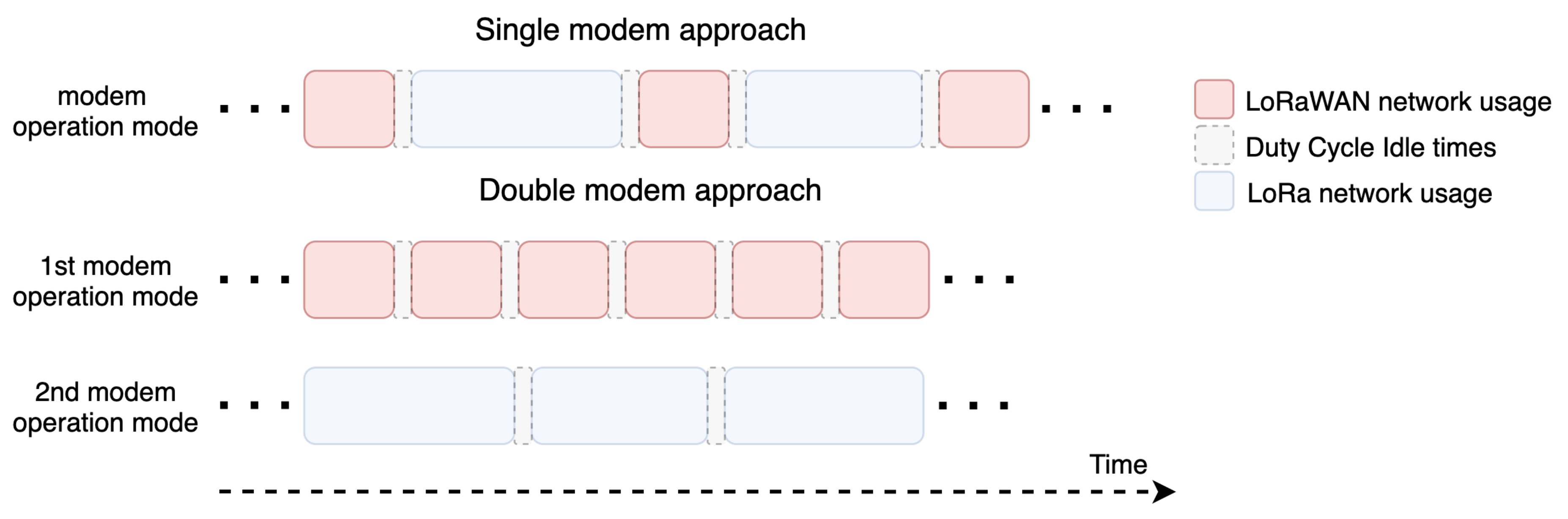
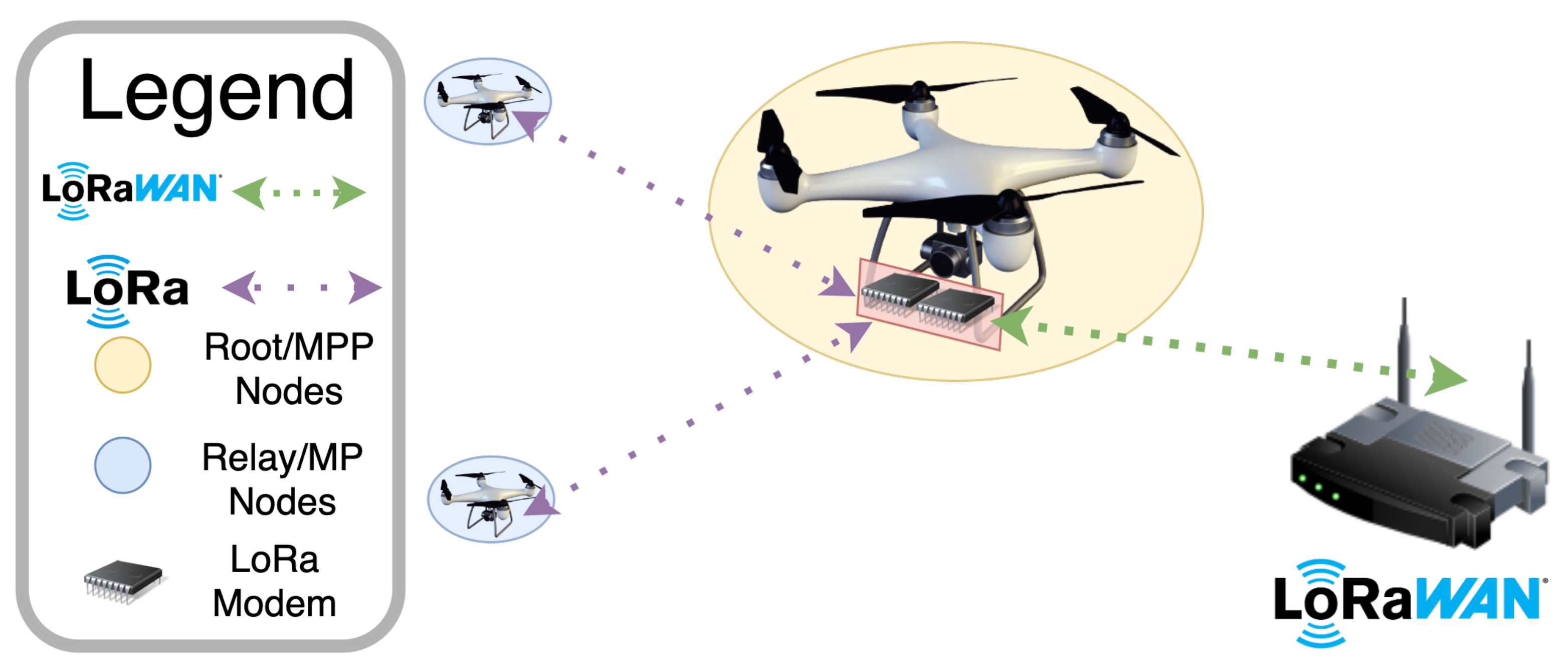
- (i) use of a single COTS board, equipped with two distinct LoRa modems, or (ii) the adoption of two distinct boards, each one equipped with a single LoRa modem, in order to reserve one modem for UAV-to-UAV raw LoRa-based broadcasting and the other modem for UAV-to-ground communications via LoRaWAN;
- use of a single COTS board with a single LoRa modem, used, according to a time division strategy, by switching between LoRa-based broadcasting (UAV-to-UAV) and LoRaWAN (UAV-to-Ground).
5. Combined Opportunistic Mesh Networking
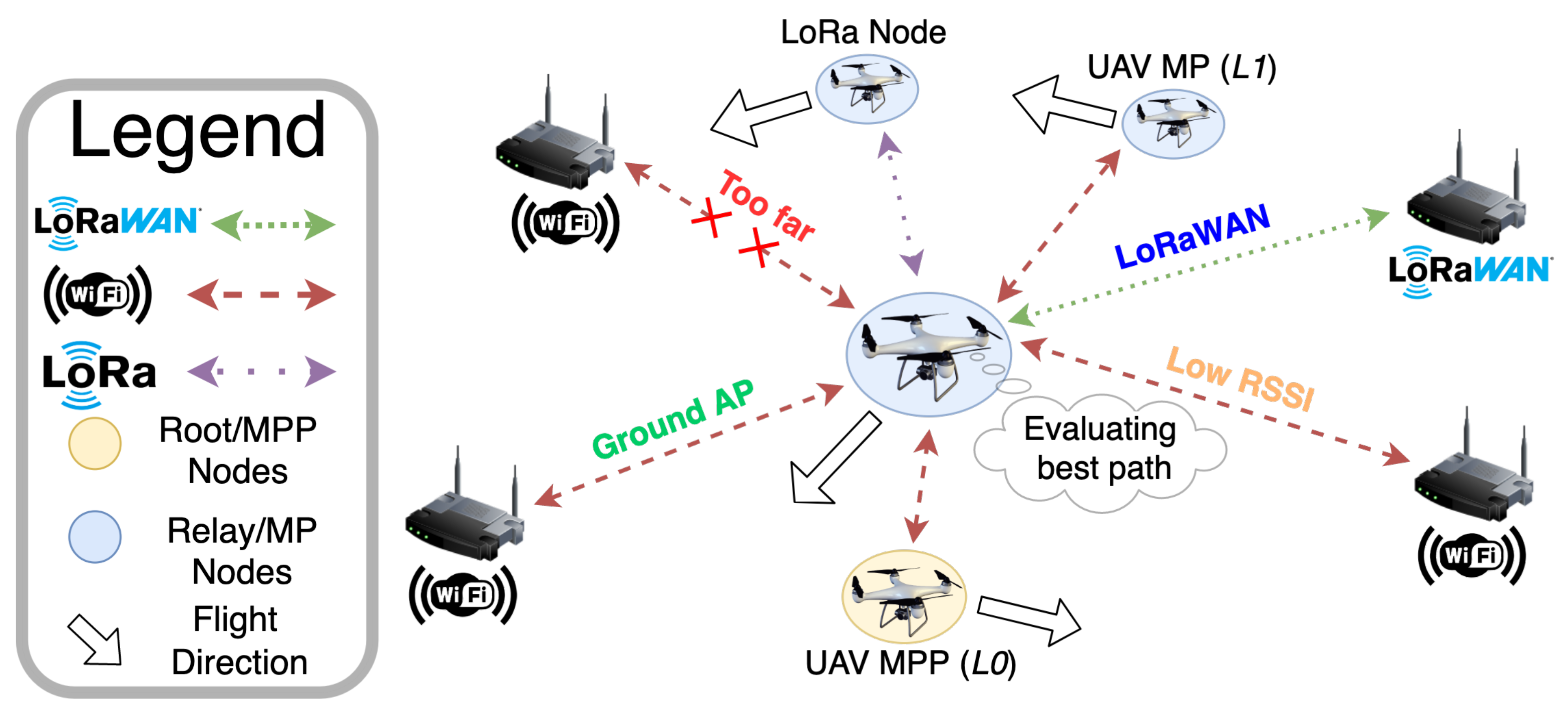
5.1. Network Selection Mechanism
5.1.1. Network Communication Interface Type
5.1.2. GNSS Position of the APs
5.1.3. RSSI of Nearby Nodes
5.1.4. Network’s Hierarchical Value of Nearby Nodes
5.1.5. Amount and Type of Data to Be Transmitted
5.1.6. Summary
5.2. UAV-to-UAV Communications
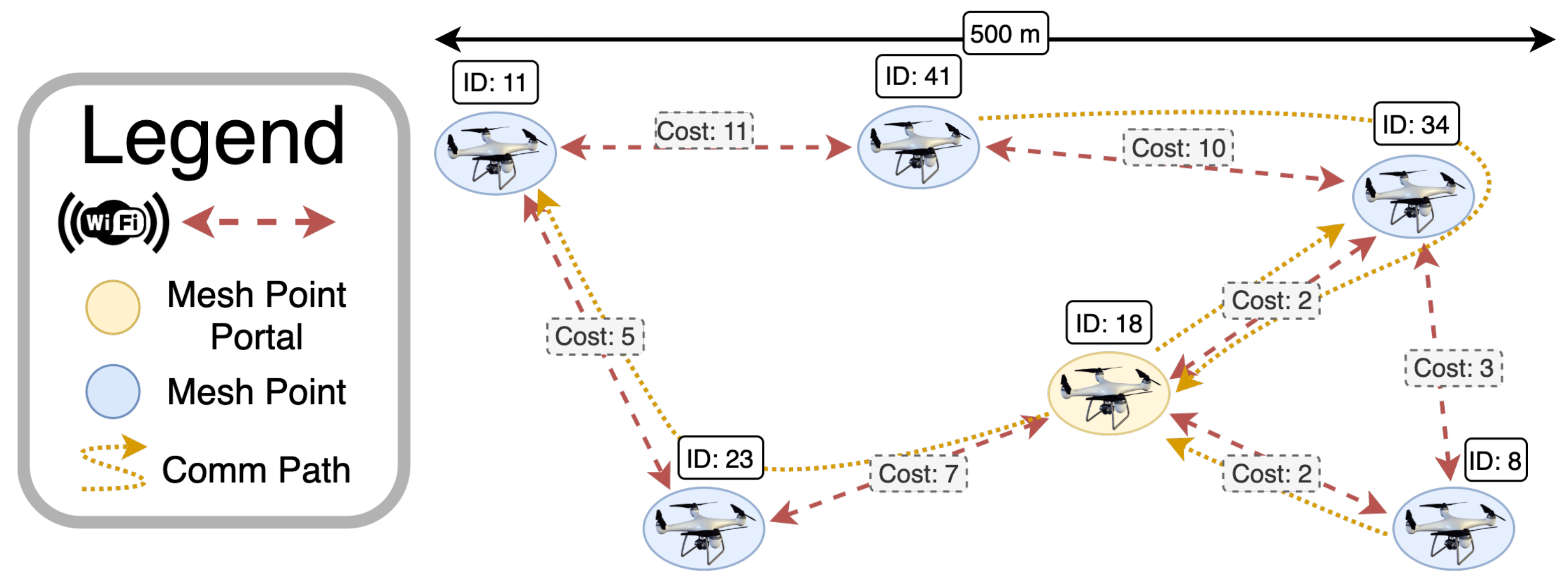
5.2.1. IEEE 802.11s-Enabled UAV-to-UAV Communications
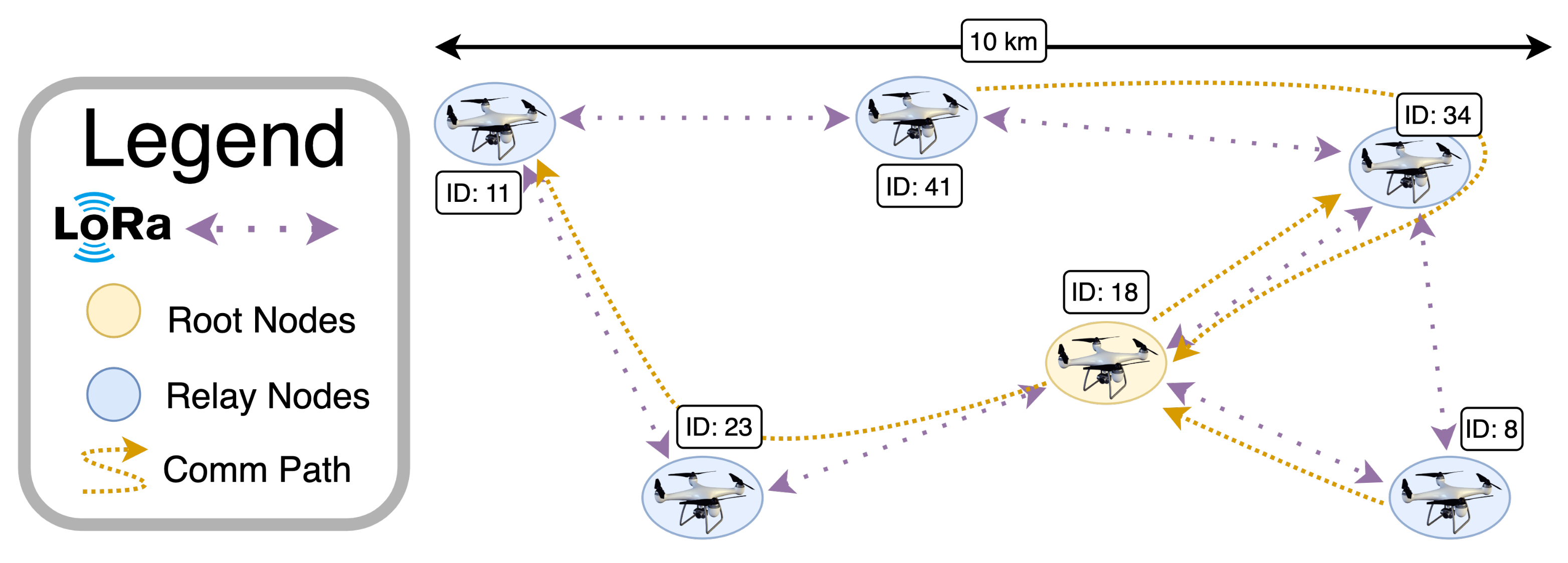
5.2.2. LoRa-Enabled UAV-to-UAV Communications
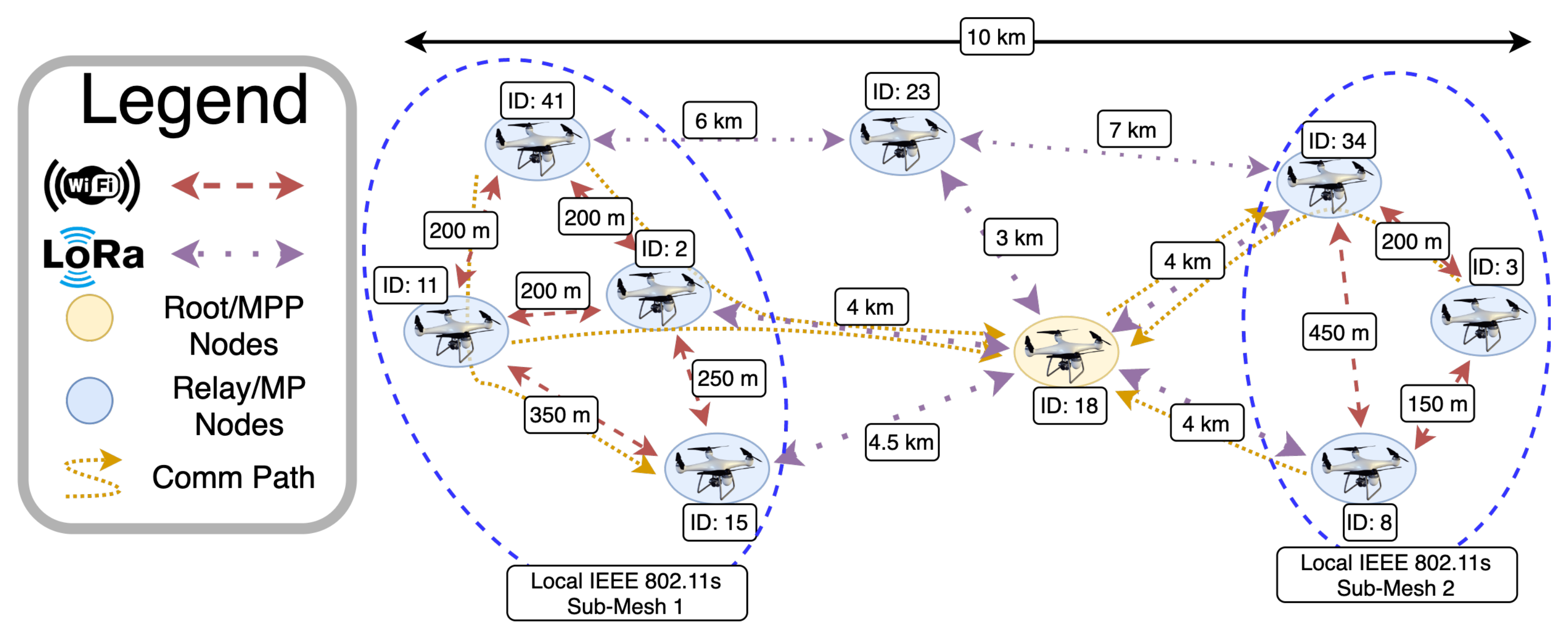
5.2.3. Hybrid Configuration-enabled UAV-to-UAV Communications
5.3. UAV-to-Ground Communications
5.3.1. IEEE 802.11s-Enabled Ground-Connected UAV Swarms
5.3.2. LoRaWAN-Enabled Ground-Connected UAV Swarm
6. Theoretical and Experimental Performance Evaluation
6.1. Theoretical Performance Analysis
6.1.1. LoRa Communication Operating Range Estimation
6.1.2. IEEE 802.11s-Based Communication Operating Range
6.2. Experimental Performance Analysis: LoRaWAN UAV-to-Ground Operating Range Evaluation
7. Use Cases
7.1. Border Surveillance
7.2. Smart Agriculture
7.3. BVLOS Instrumental Flight Backup Telemetry
7.4. Long-Range UAV Swarms Coordination and Communications
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABP | Activation-By-Personalization |
| AGL | Above Ground Level |
| AODV | Ad hoc On-Demand Distance Vector Routing Protocol |
| AI | Artificial Intelligence |
| AP | Access Point |
| AS | Application Server |
| BLE | Bluetooth Low Energy |
| BTS | Base Transceiver Station |
| BVLOS | Beyond Visual Line-of-Sight |
| BW | Bandwidth |
| B.A.T.M.A.N. | Better Approach To Mobile Ad Hoc Network |
| CF | Carrier Frequency |
| COTS | Commercial-Off-The-Shelf |
| CR | Coding Rate |
| CSS | Chirp Spread Spectrum |
| DSS | Decision Support System |
| DTN | Delay Tolerant Networking |
| EASA | European Union Aviation Safety Agency |
| ETSI | European Telecommunications Standards Institute |
| FAA | Federal Aviation Administration |
| FANET | Flying Ad Hoc Network |
| FEC | Forward Error Correction |
| FPV | First Point of View |
| FSK | Frequency-Shift Keying |
| FSPL | Free-Space Path Loss |
| GNSS | Global Navigation Satellite System |
| GPS | Global Position System |
| GW | Gateway |
| HDOP | Horizontal Dilution Of Precision |
| HQ | High Quality |
| HWMP | Hybrid Wireless Mesh Protocol |
| IQ | Chirp Polarity |
| ISM | Industrial, Scientific, and Medical |
| LAN | Local Area Network |
| LBT | Listen-Before-Talk |
| LoRa | Long Range |
| LoRaWAN | Long-Range Wide Area Network |
| LOS | Line-of-Sight |
| LPWAN | Low Power Wide Area Network |
| LTE | Long-Term Evolution |
| MAC | Medium Access Control |
| MAP | Mesh Access Point |
| MBSS | Mesh Basic Service Set |
| MMT | Mission Management Tool |
| MPM | Mesh Peer (Link) Management |
| MPP | Mesh Portal Point |
| MTOW | Maximum TakeOff Weight |
| NLOS | Non-LOS |
| NS | Network Server |
| OLSR | Optimized Link State Routing Protocol |
| OTAA | Over-The-Air-Activation |
| PHY | Physical layer |
| RC | Radio Controller |
| RF | Radio Frequency |
| RPi | Raspberry Pi |
| RSSI | Received Signal Strength Index |
| RTF | Ready-to-Fly |
| RX | Reception |
| SF | Spreading Factor |
| SFD | Start-Frame-Delimiter |
| SoC | System-on-Chip |
| STA | Station |
| TDMA | Time Division Multiple Access |
| TP | Transmission Power |
| TS-SDN | TempoSpatial-Software Defined Networking |
| TTN | The Things Network |
| TX | Transmission |
| UAV | Unmanned Aerial Vehicle |
| VLOS | Visual Line of Sight |
| WMN | Wireless Mesh Network |
References
- DJI Official Website. 2020. Available online: https://www.dji.com/ (accessed on 15 December 2020).
- DJI Phantom 3 Professional. 2015. Available online: https://www.dji.com/phantom-3-pro (accessed on 29 December 2020).
- DJI Mini 2. 2020. Available online: https://www.dji.com/mini-2 (accessed on 29 December 2020).
- Pressman, A. Drone Industry Flies Higher as COVID-19 Fuels Demand for Remote Services. 2020. Available online: https://fortune.com/2020/07/13/coronavirus-drones-dji-wing-flytrex-covid-19-pandemic/ (accessed on 29 December 2020).
- Seller, O.B.A.; Sornin, N. Low Power Long Range Transmitter. European Patent EP2763321A1, 5 February 2013. [Google Scholar]
- Institute of Electrical and Electronics Engineers (IEEE). IEEE Standard for Information Technology–Telecommunications and information exchange between systems—Local and metropolitan area networks–Specific requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) specifications Amendment 10: Mesh Networking. In IEEE Standard 802.11s-2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–372. [Google Scholar] [CrossRef]
- The Things Network (TTN). 2020. Available online: https://www.thethingsnetwork.org/ (accessed on 29 December 2020).
- Callebaut, G.; Leenders, G.; Buyle, C.; Crul, S.; Van der Perre, L. LoRa Physical Layer Evaluation for Point-to-Point Links and Coverage Measurements in Diverse Environments. In Proceedings of the IEEE European Conference on Networks and Communications (EuCNC), Valencia, Spain, 18–21 June 2019. [Google Scholar]
- Petäjäjärvi, J.; Mikhaylov, K.; Roivainen, A.; Hänninen, T.; Pettissalo, M. On the Coverage of LPWANs: Range Evaluation and Channel Attenuation Model for LoRa Technology. In Proceedings of the 14th International Conference on ITS Telecommunications (ITST), Copenhagen, Denmark, 2–4 December 2015. [Google Scholar] [CrossRef]
- Institute of Electrical and Electronics Engineers (IEEE). IEEE). IEEE Standard for Information technology–Telecommunications and information exchange between systems Local and metropolitan area networks–Specific requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. In IEEE Standard 802.11-2016 (Revision of IEEE Std 802.11-2012); IEEE: Piscataway, NJ, USA, 2016; pp. 1–3534. [Google Scholar] [CrossRef]
- European Union Aviation Safety Agency (EASA). Available online: https://www.easa.europa.eu/ (accessed on 1 April 2021).
- Federal Aviation Administration (FAA). Available online: https://www.faa.gov/ (accessed on 1 April 2021).
- What Is DJI OcuSync and How Does It Work? 2019. Available online: https://store.dji.bg/en/blog/what-is-dji-ocusync-and-how-does-it-work (accessed on 29 December 2020).
- DJI LightBridge 2. 2018. Available online: https://www.dji.com/it/lightbridge-2/info (accessed on 29 December 2020).
- The Beginners Guide to RC Protocols. 2014. Available online: https://www.rcgroups.com/forums/showthread.php?2301242-The-Beginners-Guide-to-RC-Protocols (accessed on 29 December 2020).
- Specification for Spektrum Remote Receiver Interfacing. 2020. Available online: https://www.spektrumrc.com/ProdInfo/Files/Remote%20Receiver%20Interfacing%20Rev%20A.pdf (accessed on 28 December 2020).
- FRSky Advanced Communication Control Elevated Spread Spectrum (ACCSS). 2020. Available online: https://www.frsky-rc.com/frsky-advanced-communication-control-elevated-spread-spectrum-access-protocol-release/ (accessed on 28 December 2020).
- Futaba FASSTest. 2020. Available online: https://futabausa.com/protocols/ (accessed on 28 December 2020).
- Stellin, M.; Sabino, S.; Grilo, A. LoRaWAN Networking in Mobile Scenarios Using a WiFi Mesh of UAV Gateways. Electronics 2020, 9, 573. [Google Scholar] [CrossRef]
- Sharma, V.; You, I.; Pau, G.; Colotta, M.; Lim, J.D.; Kim, J.N. LoRaWAN-Based Energy-Efficient Surveillance by Drones for Intelligent Transportation Systems. Energies 2018, 11, 630. [Google Scholar] [CrossRef]
- Saraereh, O.A.; Alsaraira, A.; Khan, I.; Uthansakul, P. Performance Evaluation of UAV-Enabled LoRa Networks for Disaster Management Applications. Sensors 2020, 20, 2396. [Google Scholar] [CrossRef] [PubMed]
- Radhmadhani, A.; Richard, I.R.; Giovani, A.; Syah, R.A. LoRaWAN as Secondary Telemetry Communication System for Drone Delivery. In Proceedings of the 2018 IEEE International Conference on Internet of Things and Intelligence System (IOTAIS), Bali, Indonesia, 1–3 November 2018. [Google Scholar] [CrossRef]
- Martinez-Caro, J.-M.; Cano, M.-D. IoT System Integrating Unmanned Aerial Vehicles and LoRa Technology: A Performance Evaluation Study. Wirel. Commun. Mob. Comput. 2019, 2019. [Google Scholar] [CrossRef]
- Morgenthaler, S.; Braun, T.; Zhao, Z.; Staub, T.; Anwander, M. UAVNet: A Mobile Wireless Mesh Network Using Unmanned Aerial Vehicles. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1603–1608. [Google Scholar] [CrossRef]
- Bautista, O.; Akkaya, K.; Selcuk Uluagac, A. Customized Novel Routing Metrics for Wireless Mesh-based Swarm-of-Drones Applications. Internet Things 2020, 11, 100265. [Google Scholar] [CrossRef]
- Esrafilian, O.; Gangula, R.; Gesbert, D. Autonomous UAV-aided Mesh Wireless Networks. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 634–640. [Google Scholar] [CrossRef]
- Dela Cruz, J.A.; Libatique, N.J.; Tangonan, G. Design of a Disaster Information System using Mobile Cloud Wireless Mesh with Delay Tolerant Network. In Proceedings of the 2019 IEEE Global Humanitarian Technology Conference (GHTC), Seattle, WA, USA, 17–20 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Panda, K.G.; Das, S.; Sen, D.; Arif, W. Design and Deployment of UAV-Aided Post-Disaster Emergency Network. IEEE Access 2019, 7, 102985–102999. [Google Scholar] [CrossRef]
- Mukherjee, A.; Misra, S.; Sukrutha, A.; Raghuwanshi, N.S. Distributed Aerial Processing for IoT-based Edge UAV Swarms in Smart Farming. Comput. Netw. 2020, 167, 107038. [Google Scholar] [CrossRef]
- Cai, E.A.; Furukawa, D.K.; Leighton, D.C.; Velazquez, G.A.; Zhang, H.; Callegaro, D.; Levorato, M. Dynamic Mesh Network for Telemetry Propagation and Communications in Coordinated Drone Swarms. 2019. Available online: http://projects.eng.uci.edu/projects/2019-2020/dynamic-mesh-network-telemetry-propagation-and-communications-coordinated-drone (accessed on 18 December 2020).
- Neumann, A.; Aichele, C.; Lindner, M.; Wunderlich, S. Better Approach To Mobile Ad-hoc Networking (B.A.T.M.A.N.). Internet-Draft Draft-Wunderlich-Openmesh-Manet-Routing, Internet Engineering Task Force (IETF). 2008. Available online: https://tools.ietf.org/html/draft-wunderlich-openmesh-manet-routing (accessed on 16 January 2021).
- Shrit, O.; Martin, S.; Alagha, K.; Pujolle, G. A New Approach to Realize Drone Swarm Using Ad-Hoc Network. In Proceedings of the 2017 16th Annual Mediterranean Ad Hoc Networking Workshop (Med-Hoc-Net), Budva, Montenegro, 28–30 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Barritt, B.; Kichkaylo, T.; Mandke, K.; Zalcman, A.; Lin, V. Operating a UAV Mesh & Internet Backhaul Network using Temporospatial SDN. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Hiertz, G.R.; Denteneer, D.; Max, S.; Taori, R.; Cardona, J.; Berlemann, L.; Walke, B. IEEE 802.11s: The WLAN Mesh Standard. IEEE Wirel. Commun. 2010, 17, 104–111. [Google Scholar] [CrossRef]
- Cilfone, A.; Davoli, L.; Belli, L.; Ferrari, G. Wireless Mesh Networking: An IoT-Oriented Perspective Survey on Relevant Technologies. Future Internet 2019, 11, 99. [Google Scholar] [CrossRef]
- Bari, S.M.S.; Anwar, F.; Masud, M.H. Performance study of hybrid Wireless Mesh Protocol (HWMP) for IEEE 802.11s WLAN mesh networks. In Proceedings of the 2012 International Conference on Computer and Communication Engineering (ICCCE), Kuala Lumpur, Malaysia, 3–5 July 2012; pp. 712–716. [Google Scholar] [CrossRef]
- Perkins, C.; Belding-Royer, E.; Das, S. Ad hoc On-Demand Distance Vector (AODV) Routing. RFC 3561, Internet Engineering Task Force (IETF). 2003. Available online: https://tools.ietf.org/html/rfc3561 (accessed on 19 January 2021).
- Clausen, T.; Jacquet, P. Optimized Link State Routing Protocol (OLSR). RFC 3626, Internet Engineering Task Force (IETF). 2003. Available online: https://tools.ietf.org/html/rfc3626 (accessed on 19 January 2021).
- Chroboczek, J. The Babel Routing Protocol. RFC 6126, Internet Engineering Task Force (IETF). 2011. Available online: https://tools.ietf.org/html/rfc6126 (accessed on 19 January 2021).
- Chroboczek, J. Extension Mechanism for the Babel Routing Protocol. RFC 7557, Internet Engineering Task Force (IETF). 2015. Available online: https://tools.ietf.org/html/rfc7557 (accessed on 19 January 2021).
- Friis, H.T. A Note on a Simple Transmission Formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Islam, S.K.; Haider, M.R. Sensors and Low Power Signal Processing; Springer: New York, NY, USA, 2010. [Google Scholar] [CrossRef]
- A Technical Overview of LoRa and LoRaWAN. Available online: https://www.loraalliance.org/sites/default/files/2018-04/what-is-lorawan.pdf (accessed on 29 December 2020).
- Decoding Lora. 2020. Available online: https://revspace.nl/DecodingLora (accessed on 19 December 2020).
- Understanding I/Q Signals and Quadrature Modulation. 2020. Available online: https://www.allaboutcircuits.com/textbook/radio-frequency-analysis-design/radio-frequency-demodulation/understanding-i-q-signals-and-quadrature-modulation/ (accessed on 19 December 2020).
- LoRa Alliance. RP002-1.0.0 LoRaWAN Regional Parameters. Available online: https://lora-alliance.org/sites/default/files/2019-11/rp_2-1.0.0_final_release.pdf (accessed on 28 December 2020).
- The Things Conference. How Spreading Factor Affects LoRaWAN Device Battery Life. 2019. Available online: https://www.thethingsnetwork.org/article/how-spreading-factor-affects-lorawan-device-battery-life (accessed on 27 December 2020).
- Aloys, A.; Yi, J.; Clausen, T.; Townsley, W.M. A Study of LoRa: Long Range & Low Power Networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar] [CrossRef]
- LoRaWAN 1.0.2 Regional Parameters. 2017. Available online: https://lora-alliance.org/wp-content/uploads/2020/11/lorawan_regional_parameters_v1.0.2_final_1944_1.pdf (accessed on 30 December 2020).
- Polonelli, T.; Brunelli, D.; Marzocchi, A.; Benini, L. Slotted ALOHA on LoRaWAN-Design, Analysis, and Deployment. Sensors 2019, 19, 838. [Google Scholar] [CrossRef]
- An In-Depth Look at LoRaWAN Class A Devices. Available online: https://lora-developers.semtech.com/library/tech-papers-and-guides/lorawan-class-a-devices (accessed on 14 December 2020).
- LoRaWAN 1.1 Regional Parameters. 2017. Available online: https://lora-alliance.org/wp-content/uploads/2020/11/lorawan-regional-parameters-v1.1ra.pdf (accessed on 9 January 2021).
- An In-depth Look at LoRaWAN Class B Devices. Available online: https://lora-developers.semtech.com/library/tech-papers-and-guides/lorawan-class-b-devices (accessed on 14 December 2020).
- An In-Depth Look at LoRaWAN Class C Devices. Available online: https://lora-developers.semtech.com/library/tech-papers-and-guides/lorawan-class-c-devices (accessed on 14 December 2020).
- LoRaWAN Specification. 2015. Available online: https://lora-alliance.org/wp-content/uploads/2020/11/2015_-_lorawan_specification_1r0_611_1.pdf (accessed on 29 December 2020).
- Semtech. LoRaWAN Airtime Calculator. Available online: https://tinyurl.com/loracalc (accessed on 29 December 2020).
- Network, T.T. Limitations: Data Rate, Packet Size, 30 s Uplink and 10 Messages Downlink Per Day Fair Access Policy. 2016. Available online: https://bit.ly/36AVwbd (accessed on 29 December 2020).
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]
- Petajajarvi, J.; Mikhaylov Konstantin, J.J.; Iinatti, J.; Pettissalo, M. Performance of a low-power wide-area network based on lora technology: Doppler robustness, scalability, and coverage. Int. J. Distrib. Sens. Netw. 2017. [Google Scholar] [CrossRef]
- European Telecommunications Standards Institute (ETSI). Short Range Devices (SRD) Operating in the Frequency Range 25 MHz to 1000 MHz; Part 2: Harmonised Standard for Access to Radio Spectrum for Non Specific Radio Equipment. 2018. Available online: https://www.etsi.org/deliver/etsi_en/300200_300299/30022002/03.02.01_60/en_30022002v030201p.pdf (accessed on 11 January 2021).
- Almeida, N.C.; Rolle, R.P.; Godoy, E.P.; Ferrari, P.; Sisinni, E. Proposal of a Hybrid LoRa Mesh / LoRaWAN Network. In Proceedings of the IEEE International Workshop on Metrology for Industry 4.0 & IoT, Roma, Italy, 3–5 June 2020. [Google Scholar] [CrossRef]
- Lee, H.C.; Ke, K.H. Monitoring of Large-Area IoT Sensors Using a LoRa Wireless Mesh Network System: Design and Evaluation. IEEE Trans. Instrum. Meas. 2018, 67, 2177–2187. [Google Scholar] [CrossRef]
- Huh, H.; Kim, J.Y. LoRa-based Mesh Network for IoT Applications. In Proceedings of the IEEE 5th World Forum on Internet of Things (WF-IoT), Limerick, Ireland, 15–18 April 2019. [Google Scholar] [CrossRef]
- Conner, W.S.; Kruys, J.; Kim, K.J.; Zuniga, J.C. IEEE 802.11s Tutorial Overview of the Amendment for Wireless Local Area Mesh Networking. 2006. Available online: https://www.ieee802.org/802_tutorials/06-November/802.11s_Tutorial_r5.pdf (accessed on 27 December 2020).
- LoRa Line Of Sight Range Test. 2018. Available online: https://www.mesh-net.co.uk/lora-line-sight-range-test/. (accessed on 5 January 2021).
- TTN Mapper: A LoRaWAN Coverage Mapping Tool. 2020. Available online: https://ttnmapper.org/ (accessed on 5 January 2021).
- LoRa World Record Broken: 832 km/517 mi Using 25 mW. 2018. Available online: https://www.thethingsnetwork.org/article/lorawan-world-record-broken-twice-in-single-experiment-1 (accessed on 28 December 2020).
- Guillen-Perez, A.; Sanchez-Iborra, R.; Cano, M.; Sanchez-Aarnoutse, J.C.; Garcia-Haro, J. WiFi Networks on Drones. In Proceedings of the 2016 ITU Kaleidoscope: ICTs for a Sustainable World (ITU WT), Bangkok, Thailand, 14–16 November 2016; pp. 1–8. [Google Scholar] [CrossRef]
- DJI Phantom 4 Professional. 2017. Available online: https://www.dji.com/phantom-4-pro/info (accessed on 7 January 2021).
- TTGO T-Beam Specifications. 2018. Available online: http://www.lilygo.cn/prod_view.aspx?TypeId=50033&Id=1163 (accessed on 8 January 2021).
- Semtech SX1276 LoRa Modem Specifications. 2016. Available online: https://www.semtech.com/products/wireless-rf/lora-transceivers/sx1276. (accessed on 5 January 2021).
- U-blox. NEO-6 u-blox 6 GPS Modules. 2017. Available online: https://www.u-blox.com/sites/default/files/products/documents/NEO-6_DataSheet_(GPS.G6-HW-09005).pdf (accessed on 8 January 2021).
- Espressif. ESP32: A Feature-Rich MCU with Integrated Wi-Fi and Bluetooth Connectivity for a Wide-Range of Applications. 2017. Available online: https://www.espressif.com/en/products/socs/esp32/resources (accessed on 7 January 2021).
- Stolfi, D.H.; Brust, M.R.; Danoy, G.; Bouvry, P. UAV-UGV-UMV Multi-Swarms for Cooperative Surveillance. Front. Robot. AI 2021, 8, 5. [Google Scholar] [CrossRef]
- Belli, L.; Cilfone, A.; Davoli, L.; Ferrari, G.; Adorni, P.; Di Nocera, F.; Dall’Olio, A.; Pellegrini, C.; Mordacci, M.; Bertolotti, E. IoT-Enabled Smart Sustainable Cities: Challenges and Approaches. Smart Cities 2020, 3, 52. [Google Scholar] [CrossRef]
- Granelli, F.; Sacchi, C.; Bassoli, R.; Cohen, R.; Ashkenazi, I. A Dynamic and Flexible Architecture Based on UAVS for Border Security and Safety. In Advanced Technologies for Security Applications; Palestini, C., Ed.; Springer: Dordrecht, The Netherlands, 2020; pp. 295–306. [Google Scholar] [CrossRef]
- Hong, L.; Guo, H.; Liu, J.; Zhang, Y. Toward Swarm Coordination: Topology-Aware Inter-UAV Routing Optimization. IEEE Trans. Veh. Technol. 2020, 69, 10177–10187. [Google Scholar] [CrossRef]
- Laouira, M.L.; Abdelli, A.; Othman, J.B.; Kim, H. An Efficient WSN Based Solution for Border Surveillance. IEEE Trans. Sustain. Comput. 2021, 6, 54–65. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-Based IoT Platform: A Crowd Surveillance Use Case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef]
- Codeluppi, G.; Cilfone, A.; Davoli, L.; Ferrari, G. LoRaFarM: A LoRaWAN-Based Smart Farming Modular IoT Architecture. Sensors 2020, 20, 2028. [Google Scholar] [CrossRef]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned Aerial Vehicles in Smart Agriculture: Applications, Requirements, and Challenges. IEEE Sens. J. 2021. [Google Scholar] [CrossRef]
- Manickam, S. A Drone-based IoT Approach to Agriculture Automation and Increase Farm Yield. SSRN Electron. J. 2020. [Google Scholar] [CrossRef]
- Codeluppi, G.; Cilfone, A.; Davoli, L.; Ferrari, G. VegIoT Garden: A modular IoT Management Platform for Urban Vegetable Gardens. In Proceedings of the 2019 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Portici, Italy, 24–26 October 2019; pp. 121–126. [Google Scholar] [CrossRef]
- Ameri E., A.; Cürüklü, B.; Miloradović, B.; Ektröm, M. Planning and Supervising Autonomous Underwater Vehicles through the Mission Management Tool. In Proceedings of the 2020 Global OCEANS: Singapore–U.S. Gulf Coast, Online, 5–30 October 2020; IEEE: Piscataway, NJ, USA, 2020; p. 1. [Google Scholar]
- Zhai, Z.; Martínez, J.F.; Beltran, V.; Martínez, N.L. Decision Support Systems for Agriculture 4.0: Survey and Challenges. Comput. Electron. Agric. 2020, 170, 105256. [Google Scholar] [CrossRef]
- Belli, L.; Cirani, S.; Davoli, L.; Melegari, L.; Mónton, M.; Picone, M. An Open-Source Cloud Architecture for Big Stream IoT Applications. In Interoperability and Open-Source Solutions for the Internet of Things: International Workshop, FP7 OpenIoT Project, Held in Conjunction with SoftCOM 2014, Split, Croatia, September 18, 2014, Invited Papers; Podnar Žarko, I., Pripužić, K., Serrano, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 73–88. [Google Scholar] [CrossRef]
- Fang, S.X.; O’Young, S.; Rolland, L. Development of Small UAS Beyond-Visual-Line-of-Sight (BVLOS) Flight Operations: System Requirements and Procedures. Drones 2018, 2, 13. [Google Scholar] [CrossRef]
- Ivancic, W.D.; Kerczewski, R.J.; Murawski, R.W.; Matheou, K.; Downey, A.N. Flying Drones Beyond Visual Line of Sight Using 4G LTE: Issues and Concerns. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019. [Google Scholar] [CrossRef]
- Nguyen, H.C.; Amorim, R.; Wigard, J.; Kovacs, I.Z.; Mogensen, P. Using LTE Networks for UAV Command and Control Link: A Rural-Area Coverage Analysis. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017. [Google Scholar] [CrossRef]
- Zhong, C.; Zhao, Z.; Luo, C.; Cenk Gursoy, M.; Qiu, Q.; Caicedo, C.; Basti, F.; Solomon, A. A Cost-Benefit Analysis to Achieve Command and Control (C2) Link Connectivity for Beyond Visual Line of Sight (BVLOS) Operations. In Proceedings of the 2020 Integrated Communications Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 8–10 September 2020. [Google Scholar] [CrossRef]
- IEEE Communications Society—Aerial Communications Emerging Technology Initiative. 3GPP UAV Communication Requirement. 2020. Available online: https://aceti.committees.comsoc.org/2020/05/20/3gpp-uav-communication-requirement/ (accessed on 1 April 2021).
- Third Generation Partnership Project (3GPP). Enhanced LTE Support for Aerial Vehicles. TR 36.777, Third Generation Partnership Project (3GPP). 2018. Available online: https://www.3gpp.org/ftp//Specs/archive/36_series/36.777/ (accessed on 1 April 2021).
- Tortonesi, M.; Stefanelli, C.; Benvegnu, E.; Ford, K.; Suri, N.; Linderman, M. Multiple-UAV coordination and communications in tactical edge networks. IEEE Commun. Mag. 2012, 50, 48–55. [Google Scholar] [CrossRef]
- Olivieri de Souza, B.J.; Endler, M. Evaluating Flight Coordination Approaches of UAV Squads for WSN Data Collection Enhancing the Internet Range on WSN Data Collection. J. Internet Serv. Appl. 2020, 11. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spreading Factor [SF] | Data Rate [DR] [55] | Bitrate [Bit/Sec] | Range [km] | RX Sensitivity [dBm] | Max Payload [Bytes] |
|---|---|---|---|---|---|
| 12 | 0 | 290 | 12+ | −136 | 51 |
| 11 | 1 | 440 | 10 | −133 | 51 |
| 10 | 2 | 980 | 8 | −132 | 51 |
| 9 | 3 | 1760 | 6 | −129 | 115 |
| 8 | 4 | 3125 | 4 | −126 | 222 |
| 7 | 5 | 5470 | 2 | −123 | 222 |
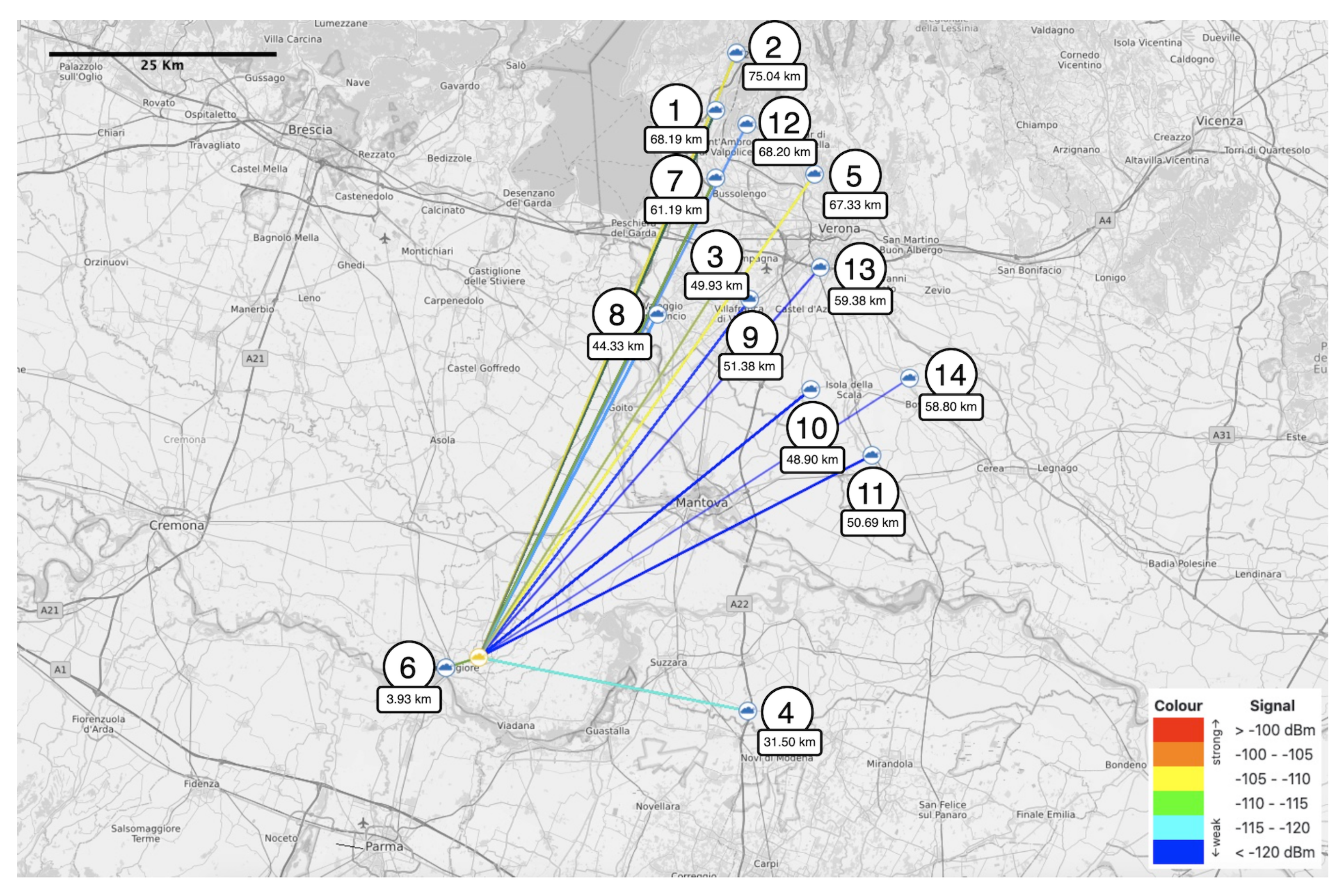
| GW Number (#) | GW Distance (km) | Average RSSI (dBm) | Received Packets (with Respect to Sent Packets) | Received Packets (%) |
|---|---|---|---|---|
| 1 | 68.199 | −113.72 | 69 of 72 | 95.83 |
| 2 | 75.040 | −110.16 | 69 of 72 | 95.83 |
| 3 | 49.936 | −110.05 | 61 of 72 | 84.72 |
| 4 | 31.505 | −113.13 | 60 of 72 | 83.33 |
| 5 | 67.339 | −107.98 | 57 of 72 | 79.17 |
| 6 | 3.933 | −107.09 | 56 of 72 | 77.78 |
| 7 | 61.193 | −113.73 | 49 of 72 | 68.06 |
| 8 | 44.330 | −116.53 | 40 of 72 | 55.56 |
| 9 | 51.385 | −118.86 | 35 of 72 | 48.61 |
| 10 | 48.904 | −117.10 | 30 of 72 | 41.67 |
| 11 | 50.691 | −118.25 | 12 of 72 | 16.67 |
| 12 | 68.206 | −116.20 | 5 of 72 | 6.94 |
| 13 | 59.384 | −114.75 | 4 of 72 | 5.56 |
| 14 | 58.800 | −118.67 | 3 of 72 | 4.17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Davoli, L.; Pagliari, E.; Ferrari, G. Hybrid LoRa-IEEE 802.11s Opportunistic Mesh Networking for Flexible UAV Swarming. Drones 2021, 5, 26. https://doi.org/10.3390/drones5020026
Davoli L, Pagliari E, Ferrari G. Hybrid LoRa-IEEE 802.11s Opportunistic Mesh Networking for Flexible UAV Swarming. Drones. 2021; 5(2):26. https://doi.org/10.3390/drones5020026
Chicago/Turabian StyleDavoli, Luca, Emanuele Pagliari, and Gianluigi Ferrari. 2021. "Hybrid LoRa-IEEE 802.11s Opportunistic Mesh Networking for Flexible UAV Swarming" Drones 5, no. 2: 26. https://doi.org/10.3390/drones5020026
APA StyleDavoli, L., Pagliari, E., & Ferrari, G. (2021). Hybrid LoRa-IEEE 802.11s Opportunistic Mesh Networking for Flexible UAV Swarming. Drones, 5(2), 26. https://doi.org/10.3390/drones5020026