
Modeling Streamflow and Sediment Loads with a Photogrammetrically Derived UAS Digital Terrain Model: Empirical Evaluation from a Fluvial Aggregate Excavation Operation


Abstract
1. Introduction
2. Materials and Methods
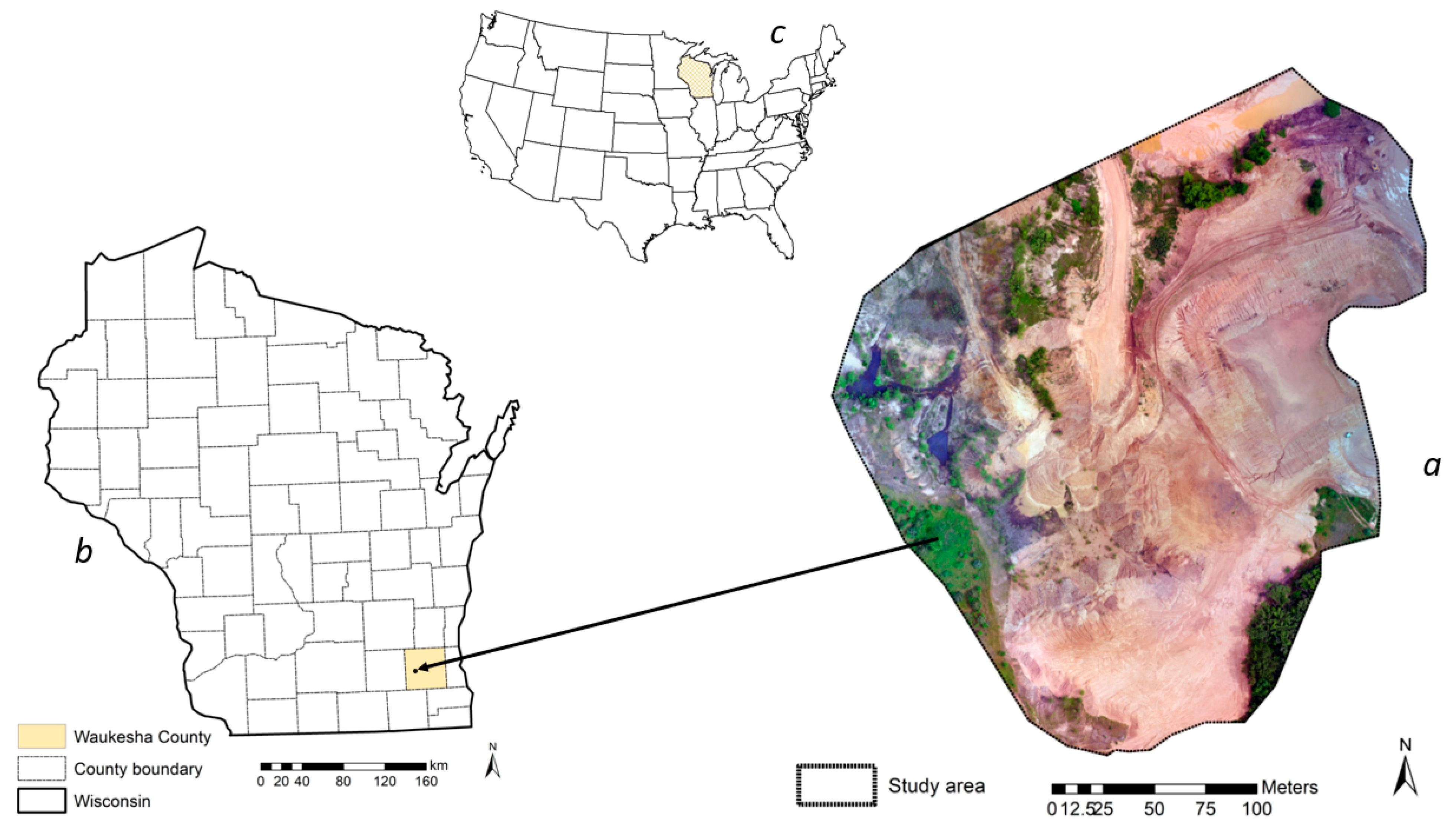
2.1. Study Area
2.2. UAS Data Collection and Processing
2.3. Flow and Sediment Model Construction
3. Results and Discussion
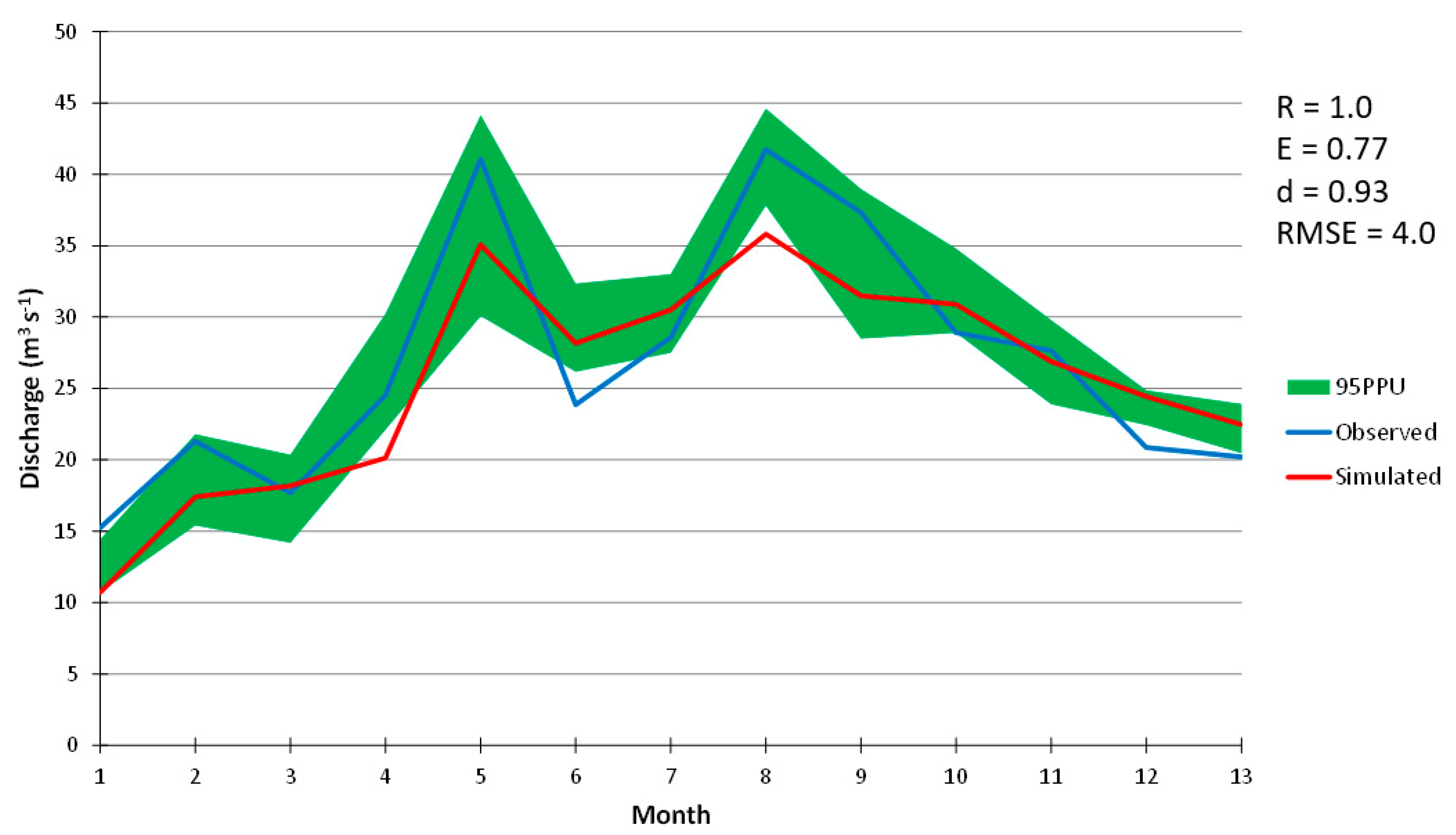
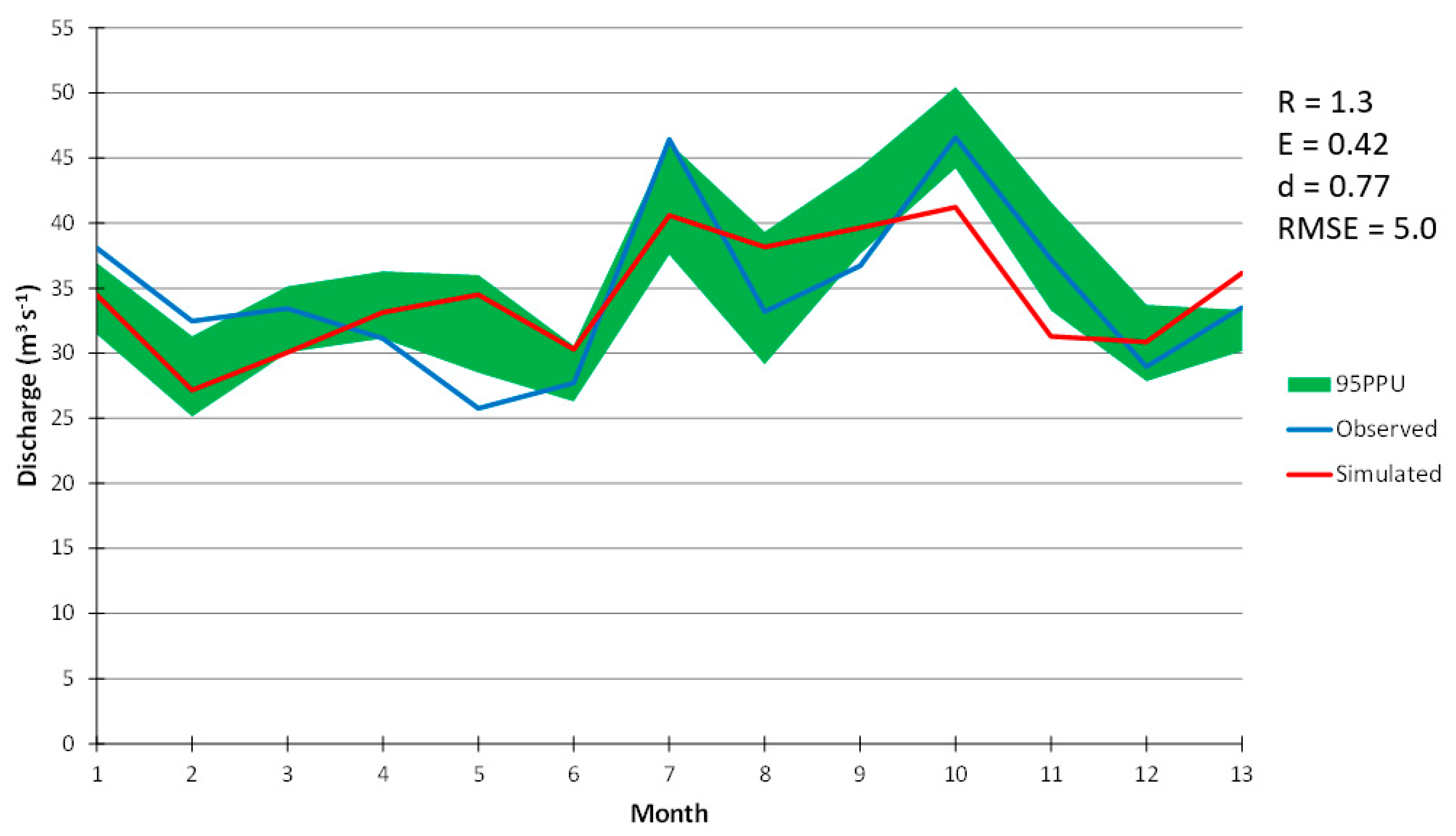
3.1. Model Calibration and Validation at the Larger Spatial Extent
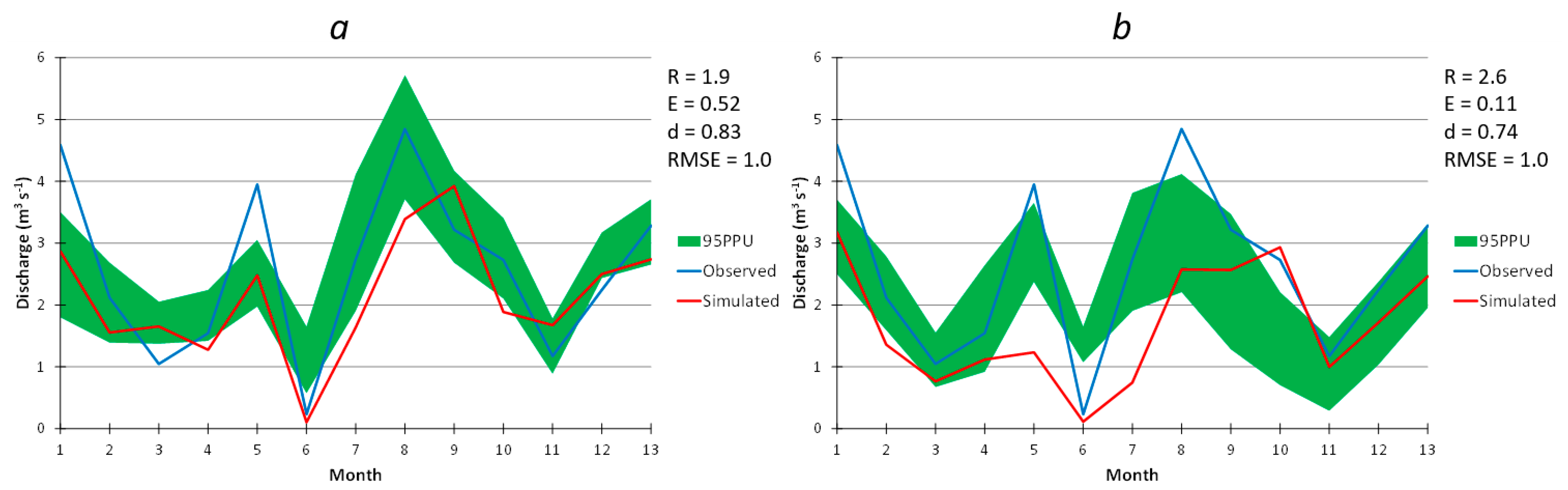
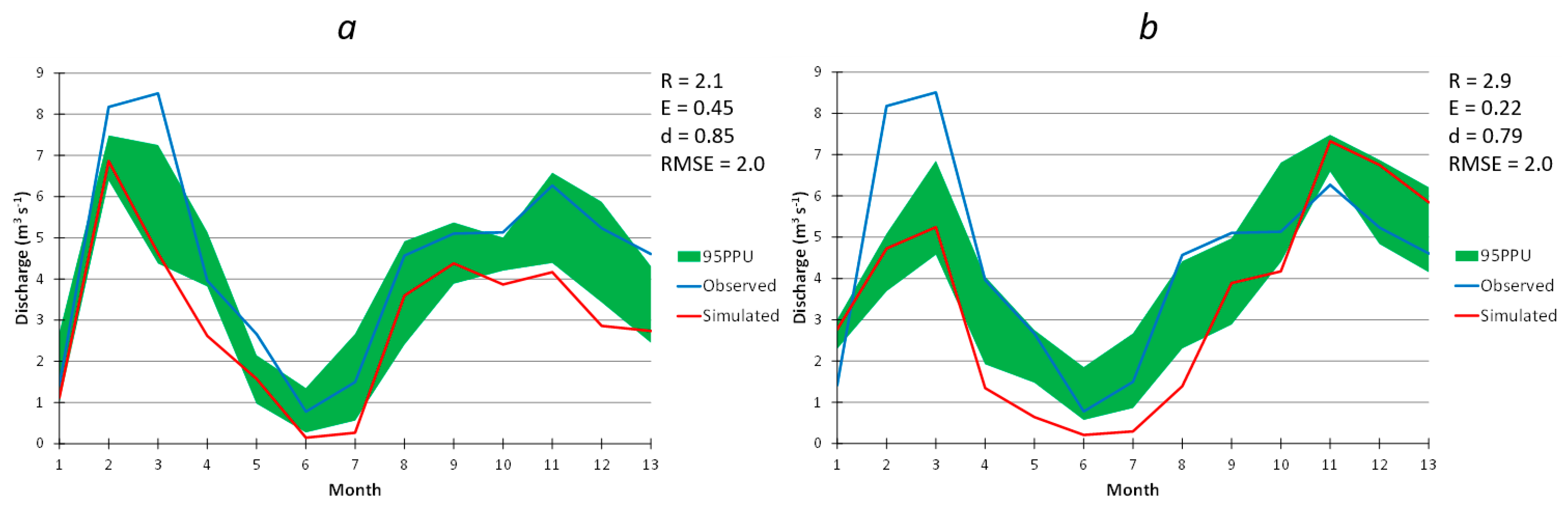
3.2. Model Calibration and Validation at the UAS Spatial Scale
3.3. Assessment of Sediment Erosion at the UAS Spatial Scale
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, S.; Tang, L.; Hupy, J.P.; Wang, Y.; Shao, G. A Commentary Review on the Use of Normalized Difference Vegetation Index (NDVI) in the Era of Popular Remote Sensing. J. For. Res. 2021, 32, 1–6. [Google Scholar] [CrossRef]
- Demario, A.; Lopez, P.; Plewka, E.; Wix, R.; Xia, H.; Zamora, E.; Gessler, D.; Yalin, A.P. Water Plume Temperature Measurements by an Unmanned Aerial System (UAS). Sensors 2017, 17, 306. [Google Scholar] [CrossRef] [PubMed]
- Bellvert, J.; Zarco-Tejada, P.J.; Girona, J.; Fereres, E. Mapping Crop Water Stress Index in a ‘Pinot-Noir’ Vineyard: Comparing Ground Measurements with Thermal Remote Sensing Imagery from an Unmanned Aerial Vehicle. Precis. Agric. 2014, 15, 361–376. [Google Scholar] [CrossRef]
- Lelong, C.C.D.; Burger, P.; Jubelin, G.; Roux, B.; Labbe, S.; Baret, F. Assessment of Unmanned Aerial Vehicles Imagery for Quantitative Monitoring of Wheat Crop in Small Pots. Sensors 2008, 8, 3557–3585. [Google Scholar] [CrossRef] [PubMed]
- Singh, K.K.; Frazier, A.E. A Meta-Analysis and Review of Unmanned Aircraft System (UAS) Imagery for Terrestrial Applications. Int. J. Remote. Sens. 2018, 39, 5078–5098. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone Remote Sensing for Forestry Research and Practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben-Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote. Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Zhang, H.; Aldana-Jague, E.; Clapuyt, F.; Wilken, F.; Vanacker, V.; Van Oost, K. Evaluating the Potential of Post-processing Kinematic (PPK) Georeferencing for UAV-Based Structure-from-Motion (SfM) Photogrammetry and Surface Change Detection. Earth Surf. Dyn. 2019, 7, 807–827. [Google Scholar] [CrossRef]
- Westoby, M.J.; Lim, M.; Hogg, M.; Pound, M.J.; Dunlop, L.; Woodward, J. Cost-Effective Erosion Monitoring of Coastal Cliffs. Coast. Eng. 2018, 138, 152–164. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-Based Earth Topography Based on Structure-from-Motion Algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Lowe, D. Object Recognition from Local Scale-Invariant Features. In Proceedings of the IEEE Transactions on Pattern Analysis and Machine Intelligence, Kerkyra, Greece, 20–27 September 1999. [Google Scholar]
- Snavely, N. Scene Reconstruction and Visualization from Internet Photo Collections: A Survey. IPSJ Trans. Comput. Vis. Appl. 2011, 3, 44–66. [Google Scholar] [CrossRef]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the World from Internet Photo Collections. Int. J. Comput. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic Structure from Motion: A New Development in Photogrammetric Measurement. Earth Surf. Process. Landforms 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Miller, P.; Kunz, M.; Mills, J.; King, M.; Murray, T.; James, T.; Marsh, S. Assessment of Glacier Volume Change Using ASTER-Based Surface Matching of Historical Photography. IEEE Trans. Geosci. Remote. Sens. 2009, 47, 1971–1979. [Google Scholar] [CrossRef]
- Resop, J.P.; Lehmann, L.; Hession, W.C. Drone Laser Scanning for Modeling Riverscape Topography and Vegetation: Comparison with Traditional Aerial Lidar. Drones 2019, 3, 35. [Google Scholar] [CrossRef]
- Leitão, J.P.; De Vitry, M.M.; Scheidegger, A.; Rieckermann, J. Assessing the Quality of Digital Elevation Models Obtained from Mini Unmanned Aerial Vehicles for Overland Flow Modelling in Urban Areas. Hydrol. Earth Syst. Sci. 2016, 20, 1637–1653. [Google Scholar] [CrossRef]
- Tauro, F.; Porfiri, M.; Grimaldi, S. Surface Flow Measurements from Drones. J. Hydrol. 2016, 540, 240–245. [Google Scholar] [CrossRef]
- Padró, J.-C.; Carabassa, V.; Balagué, J.; Brotons, L.; Alcañiz, J.M.; Pons, X. Monitoring Opencast Mine Restorations Using Unmanned Aerial System (UAS) Imagery. Sci. Total. Environ. 2019, 657, 1602–1614. [Google Scholar] [CrossRef] [PubMed]
- Park, S.; Choi, Y. Applications of Unmanned Aerial Vehicles in Mining from Exploration to Reclamation: A Review. Minerals 2020, 10, 663. [Google Scholar] [CrossRef]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A Review of UAV Monitoring in Mining Areas: Current Status and Future Perspectives. Int. J. Coal Sci. Technol. 2019, 6, 1–14. [Google Scholar] [CrossRef]
- Baltsavias, E.P. A Comparison between Photogrammetry and Laser Scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Rocha, J.; Duarte, A.; Silva, M.; Fabres, S.; Vasques, J.; Revilla-Romero, B.; Quintela, A. The Importance of High Resolution Digital Elevation Models for Improved Hydrological Simulations of a Mediterranean Forested Catchment. Remote. Sens. 2020, 12, 3287. [Google Scholar] [CrossRef]
- Ballatore, P. Extracting Digital Elevation Models from SAR Data through Independent Component Analysis. Int. J. Remote. Sens. 2011, 32, 3807–3817. [Google Scholar] [CrossRef]
- Ghuffar, S. DEM Generation from Multi Satellite PlanetScope Imagery. Remote. Sens. 2018, 10, 1462. [Google Scholar] [CrossRef]
- Husson, E.; Ecke, F.; Reese, H. Comparison of Manual Mapping and Automated Object-Based Image Analysis of Non-Submerged Aquatic Vegetation from Very-High-Resolution UAS Images. Remote. Sens. 2016, 8, 724. [Google Scholar] [CrossRef]
- Hamshaw, S.D.; Engel, T.; Rizzo, D.M.; O’Neil-Dunne, J.; Dewoolkar, M.M. Application of Unmanned Aircraft System (UAS) for Monitoring Bank Erosion along River Corridors. Geomatics, Nat. Hazards Risk 2019, 10, 1285–1305. [Google Scholar] [CrossRef]
- Kang, B.; Kim, J.G.; Kim, D.; Kang, D.H. Flow Estimation using Drone Optical Imagery with Non-uniform Flow Modeling in a Controlled Experimental Channel. KSCE J. Civ. Eng. 2019, 23, 1891–1898. [Google Scholar] [CrossRef]
- Petrasova, A.; Mitasova, H.; Petras, V.; Jeziorska, J. Fusion of High-Resolution DEMs for Water Flow Modeling. Open Geospat. Data Softw. Stand. 2017, 2, 205. [Google Scholar] [CrossRef]
- Jeziorska, J.; Mitasova, H.; Petrasova, A.; Petras, V.; Divakaran, D.; Zajkowski, T. Overland Flow Analysis Using Time Series of sUAS Derived Data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III, 159–166. [Google Scholar] [CrossRef]
- Tang, Q.; Schilling, O.S.; Kurtz, W.; Brunner, P.; Vereecken, H.; Franssen, H.-J.H. Simulating Flood-Induced Riverbed Transience Using Unmanned Aerial Vehicles, Physically Based Hydrological Modeling, and the Ensemble Kalman Filter. Water Resour. Res. 2018, 54, 9342–9363. [Google Scholar] [CrossRef]
- Tamminga, A.D.; Hugenholtz, C.H.; Eaton, B.C.; Lapointe, M. Hyperspatial Remote Sensing of Channel Reach Morphology and Hydraulic Fish Habitat Using an Unmanned Aerial Vehicle (UAV): A First Assessment in the Context of River Research and Management. River Res. Appl. 2015, 31, 379–391. [Google Scholar] [CrossRef]
- Meinen, B.U.; Robinson, D.T. Streambank Topography: An Accuracy Assessment of UAV-Based and Traditional 3D Reconstructions. Int. J. Remote. Sens. 2019, 41, 1–18. [Google Scholar] [CrossRef]
- Stocker, C.; Eltner, A.; Karrasch, P. Measuring Gullies by Synergetic Application of UAV and Close Range Photogram-Metry–A Case Study from Andalusia, Spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Gudino-Elizondo, N.; Biggs, T.W.; Castillo, C.; Bingner, R.L.; Langendoen, E.J.; Taniguchi, K.T.; Kretzschmar, T.; Yuan, Y.; Liden, D. Measuring Ephemeral Gully Erosion Rates and Topographical Thresholds in an Urban Watershed Using Unmanned Aerial Systems and Structure from Motion Photogrammetric Techniques. Land Degrad. Dev. 2018, 29, 1896–1905. [Google Scholar] [CrossRef]
- Van der Velde, Y.; Rozemeijer, J.C.; De Rooij, G.H.; Van Geer, F.C.; Torfs, P.J.J.F. Improving Catchment Discharge Predic-Tions by Inferring Flow Route Contributions from a Nested-Scale Monitoring and Model Setup. Hydrol. Earth Syst. Sci. 2011, 15, 913–930. [Google Scholar] [CrossRef]
- Zeiger, S.; Hubbart, J.A. Quantifying Suspended Sediment Flux in a Mixed-Land-Use Urbanizing Watershed Using a Nest-Ed-Scale Study Design. Sci. Total Environ. 2016, 542, 315–323. [Google Scholar] [CrossRef] [PubMed]
- Didszun, J.; Uhlenbrook, S. Scaling of Dominant Runoff Generation Processes: Nested Catchments Approach Using Multiple Tracers. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- USDA (United States Department of Agriculture). 2019 National Agriculture Imagery Program. Available online: http://nrcs.usda.gov (accessed on 14 June 2019).
- James, M.R.; Chandler, J.H.; Eltner, A.; Fraser, C.; Miller, P.E.; Mills, J.P.; Noble, T.; Robson, S.; Lane, S.N. Guidelines on the Use of Structure-from-Motion Photogrammetry in Geomorphic Research. Earth Surf. Process. Landforms 2019, 44, 2081–2084. [Google Scholar] [CrossRef]
- Axelsson, P. DEM Generation from Laser Scanner Data Using Adaptive Tin Models. In The International Archives of the Photogrammetry and Remote Sensing; 2000; Volume 33, pp. 110–117. Available online: https://www.isprs.org/proceedings/XXXIII/congress/part4/111_XXXIII-part4.pdf (accessed on 1 February 2021).
- Serifoglu, C.; Gungor, O.; Yilmaz, V. Performance Evaluation of Different Filtering Algorithms for UAV-Based Point Clouds. The International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2016, 41. [Google Scholar] [CrossRef]
- Waukesha County. Elevation/Imagery Data Download Application, Waukesha County. 2020. Available online: http://data-waukeshacounty.opendata.arcgis.com/datasets/12b0cdf25d5a458ca74b97cd23ad8135 (accessed on 6 July 2019).
- Blaschke, T. Object Based Image Analysis for Remote Sensing. ISPRS J. Photogramm. Remote. Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J. An Assessment of the Effectiveness of a Random Forest Classifier for Land-Cover Classification. ISPRS J. Photogramm. Remote. Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Drǎguţ, L.; Tiede, D.; Levick, S.R. ESP: A Tool to Estimate Scale Parameter for Multiresolution Image Segmentation of Remotely Sensed Data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Wilson, C.O.; Liang, B.; Rose, S.J. Projecting Future Land Use/Land Cover by Integrating Drivers and Plan Prescriptions: The Case for Watershed Applications. GIScience Remote. Sens. 2018, 56, 511–535. [Google Scholar] [CrossRef]
- Kahya, O.; Bayram, B.; Reis, S. Land Cover Classification with an Expert System Approach Using Landsat ETM Imagery: A Case Study of Trabzon. Environ. Monit. Assess. 2008, 160, 431–438. [Google Scholar] [CrossRef] [PubMed]
- Congalton, R.G. A Review of Assessing the Accuracy of Classifications of Remotely Sensed Data. Remote. Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Arnold, J.G.; Allen, P.M.; Bernhardt, G. A Comprehensive Surface-Ground Flow Model. J. Hydrol. 1993, 142, 47–69. [Google Scholar] [CrossRef]
- Arnold, J.G.; Srinivasan, R.; Muttiah, R.S.; Williams, J.R. Large Area Hydrologic Modeling and Assessment Part I: Model Development. JAWRA J. Am. Water Resour. Assoc. 1998, 34, 73–89. [Google Scholar] [CrossRef]
- Soil Survey Staff, Natural Resources Conservation Service, United States Department of Agriculture. Soil Survey Geographic (SSURGO) Database for Waukesha and Washington Counties, Wisconsin. Available online: https://data.nal.usda.gov/dataset/soil-survey-geographic-database-ssurgo (accessed on 6 June 2020).
- Abbaspour, K.C. User Manual for SWAT-CUP 2012. SWAT Calibration and Uncertainty Programs. (105 pp.) Dubendorf, Switzerland: Ewag: Swiss Fed. Inst. Of Aquat. Sci. and Technol. 2018. Available online: http://www.eawag.ch/forschung/siam/software/swat/index (accessed on 5 June 2018).
- Wilson, C.O. Land Use/Land Cover Water Quality Nexus: Quantifying Anthropogenic Influences on Surface Water Quality. Environ. Monit. Assess. 2015, 187, 1–23. [Google Scholar] [CrossRef]
- Abbaspour, K.C.; Vaghefi, S.A.; Srinivasan, R. A Guideline for Successful Calibration and Uncertainty Analysis for Soil and Water Assessment: A Review of Papers from the 2016 International SWAT Conference. Water 2017, 10, 6. [Google Scholar] [CrossRef]
- Rouholahnejad, E.; Abbaspour, K.; Vejdani, M.; Srinivasan, R.; Schulin, R.; Lehmann, A. A Parallelization Framework for Calibration of Hydrological Models. Environ. Model. Softw. 2012, 31, 28–36. [Google Scholar] [CrossRef]
- Wilson, C.; Weng, Q. Assessing Surface Water Quality and Its Relation with Urban Land Cover Changes in the Lake Calumet Area, Greater Chicago. Environ. Manag. 2010, 45, 1096–1111. [Google Scholar] [CrossRef] [PubMed]
- Nash, J.E.; Sutcliffe, J.V. River Flow Forecasting through Conceptual Models: Part 1—A Discussion of Principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Willmott, C.J. On the Validation of Models. Phys. Geogr. 1981, 2, 184–194. [Google Scholar] [CrossRef]
- Ritter, A.; Munoz, C. Performance Evaluation of Hydrological Models: Statistical Significance for Reducing Subjectivity in Goodness-of-Fit Assessments. J. Hydrol. 2013, 480, 33–45. [Google Scholar] [CrossRef]
- Krysanova, V.; Müller-Wohlfeil, D.-I.; Becker, A. Development and Test of a Spatially Distributed Hydrological/Water Quality Model for Mesoscale Watersheds. Ecol. Model. 1998, 106, 261–289. [Google Scholar] [CrossRef]
- Eckhardt, K.; Arnold, J. Automatic Calibration of a Distributed Catchment Model. J. Hydrol. 2001, 251, 103–109. [Google Scholar] [CrossRef]
- Krause, P.; Boyle, D.P.; Bäse, F. Comparison of Different Efficiency Criteria for Hydrological Model Assessment. Adv. Geosci. 2005, 5, 89–97. [Google Scholar] [CrossRef]
- Bárdossy, A. Calibration of Hydrological Model Parameters for Ungauged Catchments. Hydrol. Earth Syst. Sci. 2007, 11, 703–710. [Google Scholar] [CrossRef]
- Pei, T.; Qin, C.-Z.; Zhu, A.-X.; Yang, L.; Luo, M.; Li, B.; Zhou, C. Mapping Soil Organic Matter Using the Topographic Wetness Index: A Comparative Study Based on Different Flow-Direction Algorithms and Kriging Methods. Ecol. Indic. 2010, 10, 610–619. [Google Scholar] [CrossRef]
- Wilson, J.P.; Lam, C.S.; Deng, Y. Comparison of the Performance of Flow-Routing Algorithms Used in GIS-Based Hydrologic Analysis. Hydrol. Process. 2007, 21, 1026–1044. [Google Scholar] [CrossRef]
- Graham, A.; Coops, N.C.; Wilcox, M.; Plowright, A. Evaluation of Ground Surface Models Derived from Unmanned Aerial Systems with Digital Aerial Photogrammetry in a Disturbed Conifer Forest. Remote. Sens. 2019, 11, 84. [Google Scholar] [CrossRef]
- Lizuka, K.; Itoh, M.; Shiodera, S.; Matsubara, T.; Dohar, M.; Watanabe, K. Advantages of Unmanned Aerial Vehicle (UAV) Photogrammetry for Landscape Analysis Compared with Satellite Data: A Case Study of Postmining Sites in Indonesia. Cogent Geosci. 2018, 4, 1–15. [Google Scholar]
- Jensen, J.L.R.; Mathews, A.J. Assessment of Image-Based Point Cloud Products to Generate a Bare Earth Surface and Estimate Canopy Heights in a Woodland Ecosystem. Remote. Sens. 2016, 8, 50. [Google Scholar] [CrossRef]
- Almeida, D.; Broadbent, E.; Zambrano, A.; Wilkinson, B.; Ferreira, M.; Chazdon, R.; Meli, P.; Gorgens, E.; Silva, C.; Stark, S.; et al. Monitoring the Structure of Forest Restoration Plantations with a Drone-Lidar System. Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 192–198. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Collection Date | 6 June 2015 |
|---|---|
| UAS platform | DJI Matrice 600 Pro w/RTK |
| UAS mission planning application | Pix4D Capture |
| Flight path overlap | 80% lateral and frontal |
| Area covered | 12.23 hectares |
| Number of images acquired | 125 |
| Sensor/platform altitude | 80 m |
| Ground sampling distance | 2.07 cm |
| Camera model | Zenmuse X5 |
| Camera focal length | 15 mm |
| Camera resolution | 16 megapixels |
| Image coordinate system | WGS84 (egm96) |
| GNSS integrated survey system | Trimble R2 |
| Ground control point (GCP) coordinate system | WGS84/UTMzone 16N (egm96) |
| Number of GCPs | 6 |
| Number of check shots per GCP | 6 |
| Check points/shot tolerance | 0.01 m horizontal/0.02 m vertical |
| SfM Processing Software | Pix4D (Version 3.1.23) |
|---|---|
| Number of calibrated images | 125/125 (100%) |
| Median keypoints per image | 35,170 |
| Matches per calibrated image | 13,384 |
| GCP mean RMS error | X(m) 0.002254 Y(m) − 0.013442 Z(m) 0.064130 |
| Overall GCP mean RMS error | 0.058 |
| Absolute camera position uncertainties | Mean X(m) 0.028 Mean Y(m) 0.024 |
| Number of 2D keypoint observations for bundle block adjustment | 1,600,420 |
| Number of 3D keypoint observations for bundle block adjustment | 575,499 |
| Mean reprojection error (pixels) | 0.162 |
| Point cloud density | Optimal |
| Parameter | Description | Minimum Value | Maximum Value | Fitted Value |
|---|---|---|---|---|
| CN2 | Curve number for soil moisture 2 | 34.0 | 98.0 | 69.30 |
| ALPHA_BF | Baseflow alpha factor (1/days) | 0 | 0.1 | 0.62 |
| GW_DELAY | Ground water delay time (days) | 20.0 | 450 | 153.70 |
| GWQMN | Threshold dept of water in shallow aquifer (mm H2O) | 0.0 | 300.0 | 153.90 |
| ESCO | Soil evaporation compensation factor | 0.0 | 1.0 | 0.91 |
| SURLAG | Surface runoff lag coefficient | 1.0 | 24.0 | 11.60 |
| CH_K2 | Effective hydraulic conductivity in main channel | 6.0 | 25.0 | 18.56 |
| CH_N2 | Manning’s “n” value for the main channel | −0.01 | 0.3 | 0.02 |
| SHALLST | Initial depth of water in the shallow aquifer (mm H2O) | 0.0 | 1000 | 239 |
| GWHT | Initial groundwater height (m) | 0.0 | 25.0 | 21.7 |
| RCHRG_DP | Deep aquifer percolation fraction | 0.0 | 1.0 | 0.29 |
| TIMP | Snowpack temperature lag factor | 0.0 | 1.0 | 0.09 |
| SMFMX | Maximum melt rate for snow during year (mm H2O/°C-day) | 0.0 | 10.0 | 0.53 |
| SMFMN | Minimum melt rate for snow during year (mm H2O/°C-day) | 0.0 | 10.0 | 7.7 |
| SMTMP | Snowmelt base temperature (°C) | −5.5 | 5.0 | −3.75 |
| SOL_AWC | Available water capacity for the soil layer (mm H2O/mm soil) | 0.0 | 1.0 | 0.27 |
| PRF | Sediment routing factor in main channel | 0.0 | 2.0 | 1.80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hupy, J.P.; Wilson, C.O. Modeling Streamflow and Sediment Loads with a Photogrammetrically Derived UAS Digital Terrain Model: Empirical Evaluation from a Fluvial Aggregate Excavation Operation. Drones 2021, 5, 20. https://doi.org/10.3390/drones5010020
Hupy JP, Wilson CO. Modeling Streamflow and Sediment Loads with a Photogrammetrically Derived UAS Digital Terrain Model: Empirical Evaluation from a Fluvial Aggregate Excavation Operation. Drones. 2021; 5(1):20. https://doi.org/10.3390/drones5010020
Chicago/Turabian StyleHupy, Joseph P., and Cyril O. Wilson. 2021. "Modeling Streamflow and Sediment Loads with a Photogrammetrically Derived UAS Digital Terrain Model: Empirical Evaluation from a Fluvial Aggregate Excavation Operation" Drones 5, no. 1: 20. https://doi.org/10.3390/drones5010020
APA StyleHupy, J. P., & Wilson, C. O. (2021). Modeling Streamflow and Sediment Loads with a Photogrammetrically Derived UAS Digital Terrain Model: Empirical Evaluation from a Fluvial Aggregate Excavation Operation. Drones, 5(1), 20. https://doi.org/10.3390/drones5010020