Safety Enhancement of UAVs from the Signal Processing’s Perspectives: A Bird’s Eye View


Abstract
1. Introduction
- We provide a bird’s eye view of the importance of signal processing algorithms in enhancing the safety of UAVs.
- In each area, we highlight some recent advances in the literature.
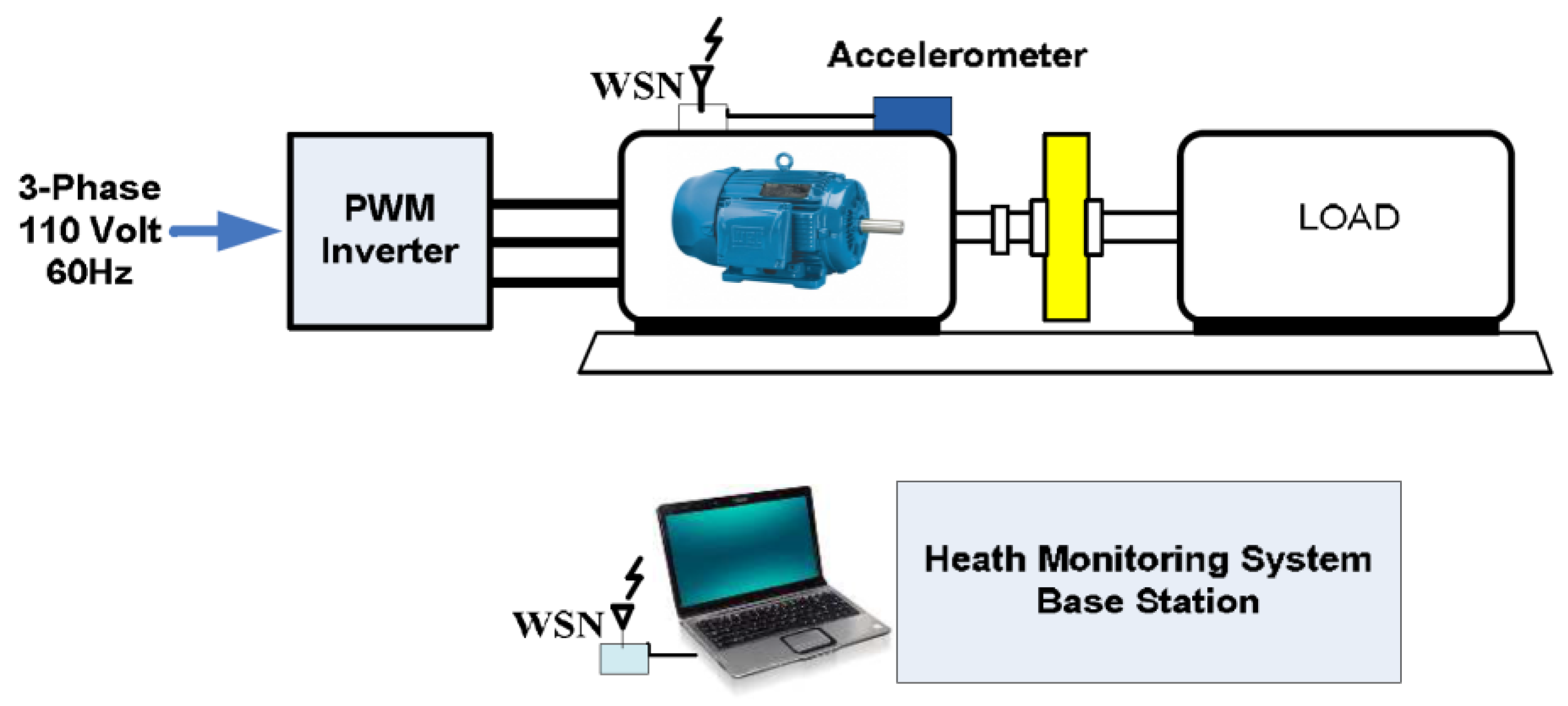
2. Condition Based Maintenance (CBM)
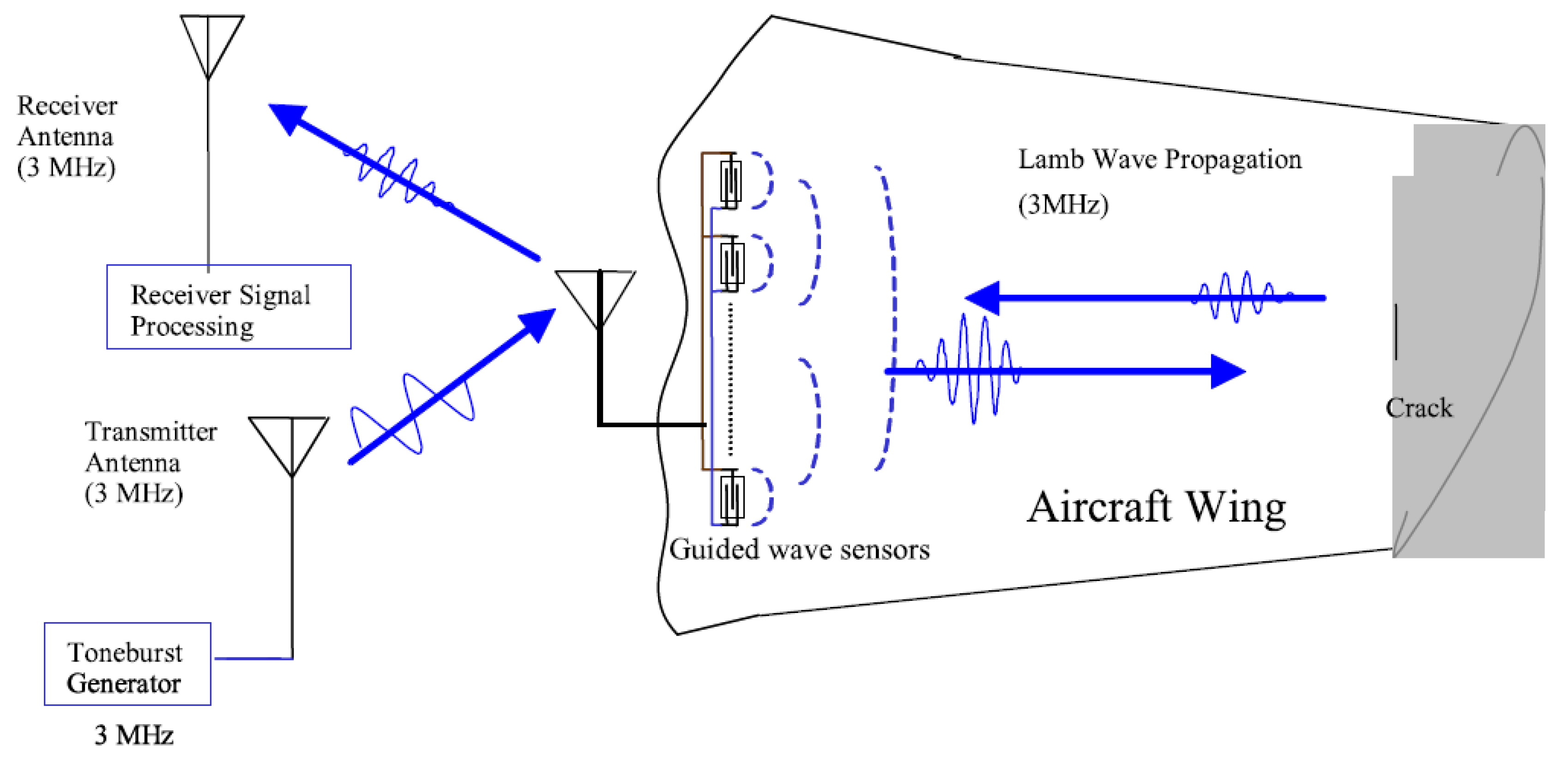
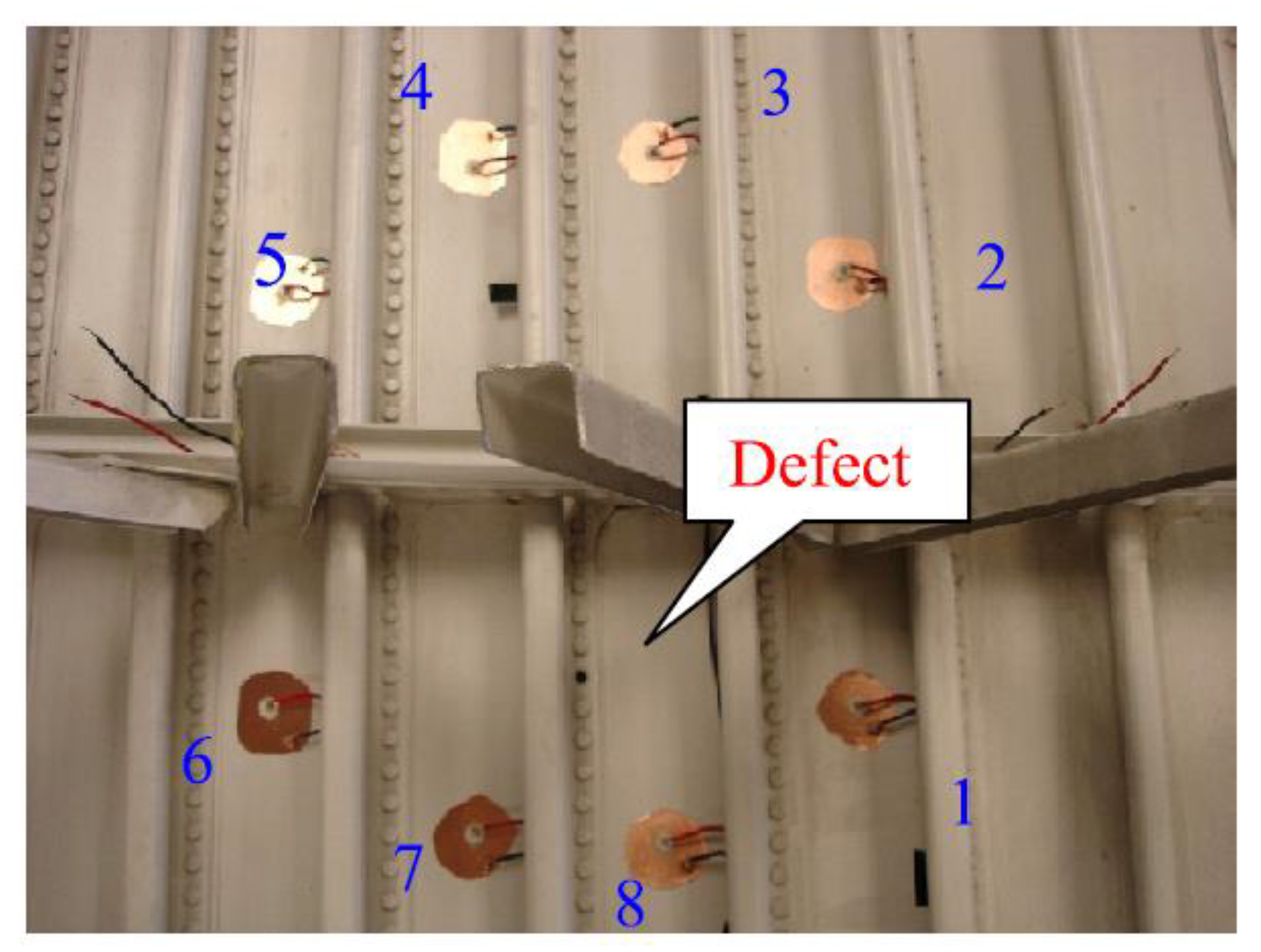
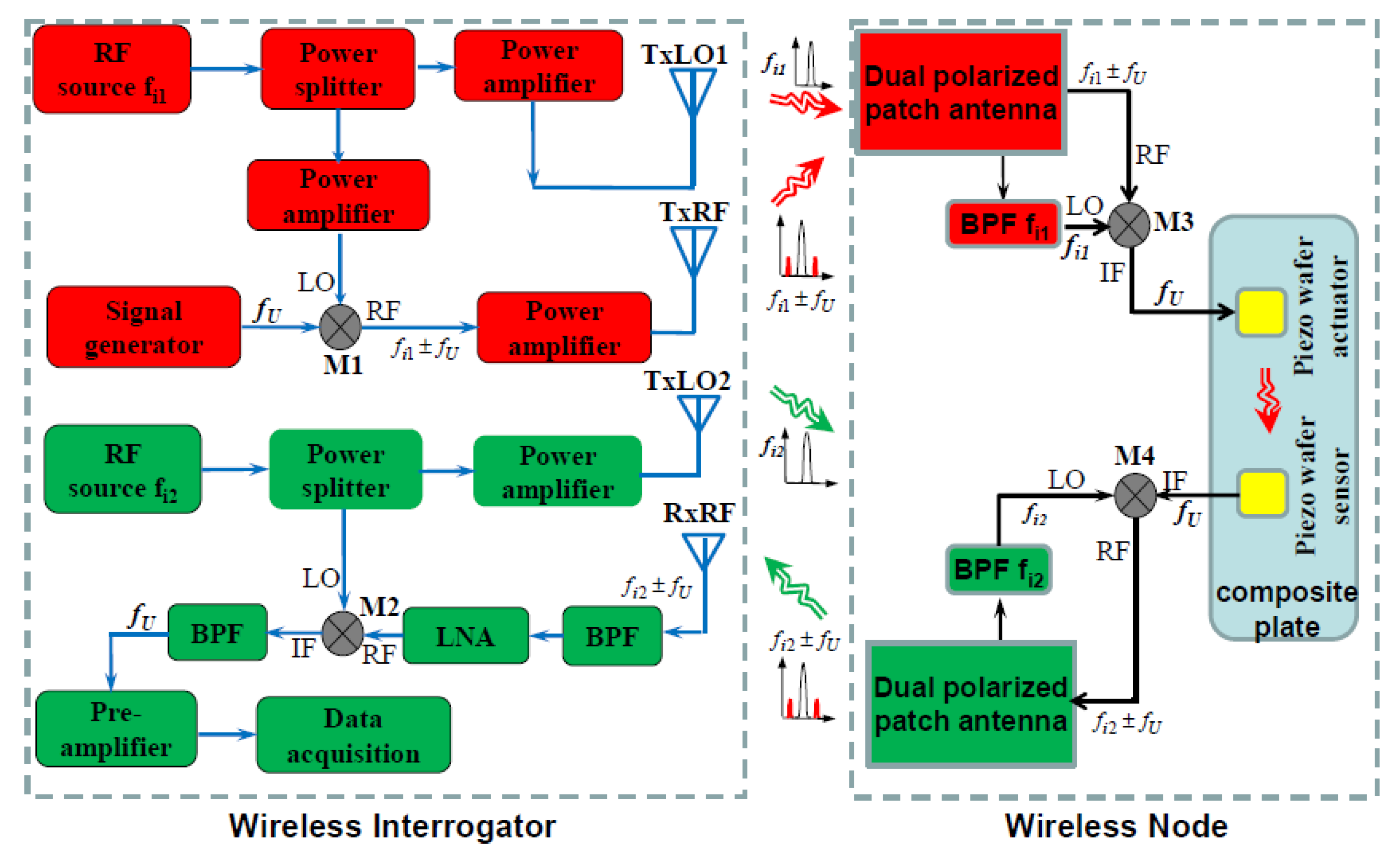
3. Structural Health Monitoring (SHM)
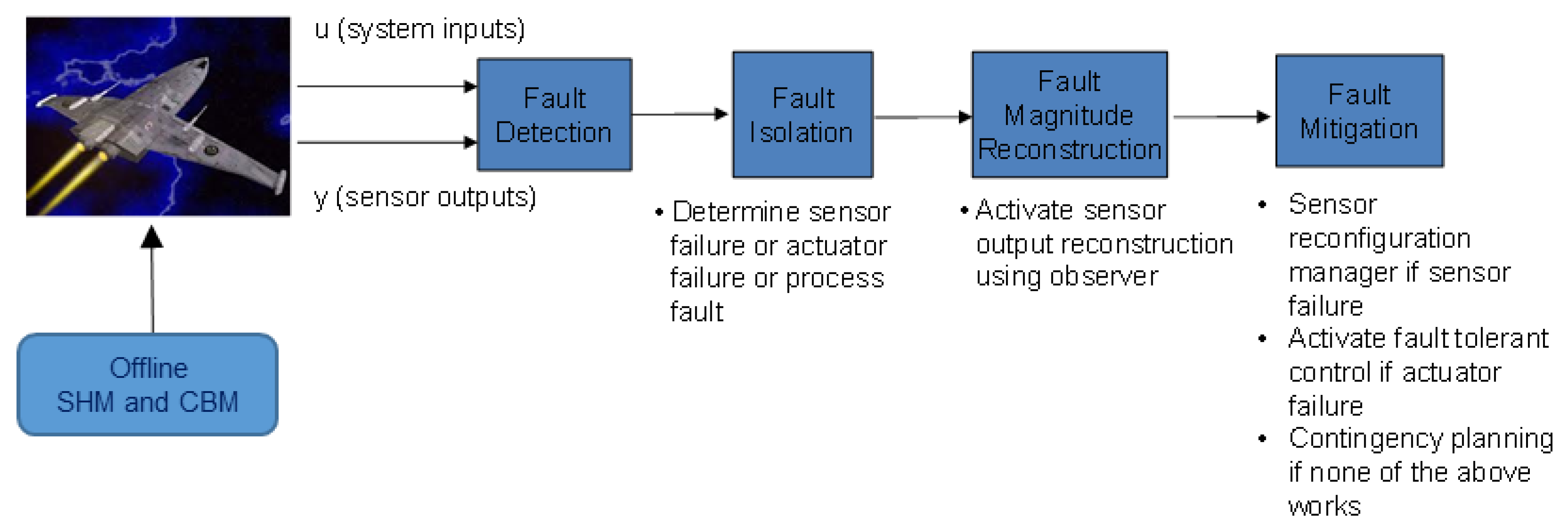
4. Sensor and Actuator Fault Diagnostic Algorithms
5. Sensor Magnitude Reconstruction
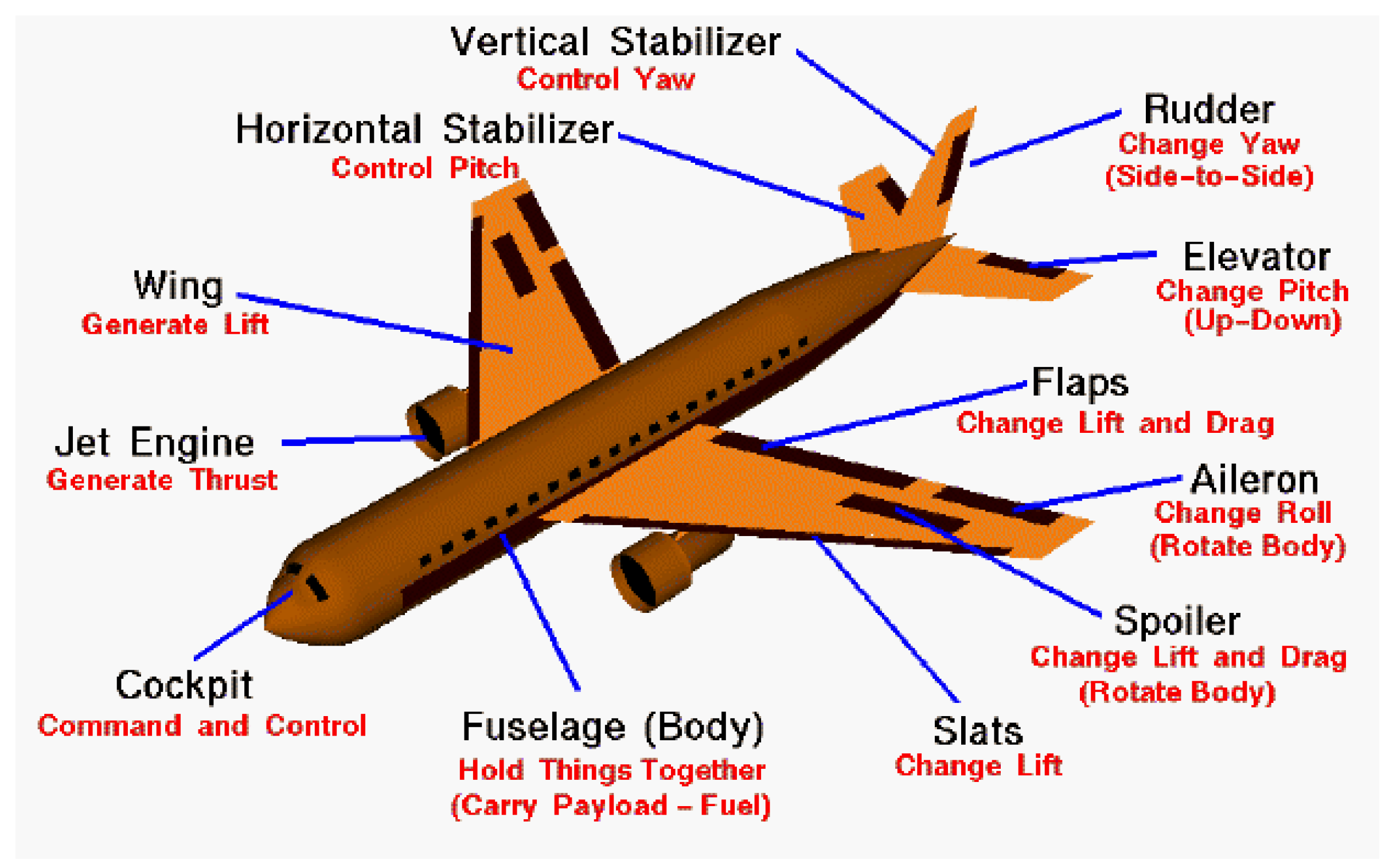
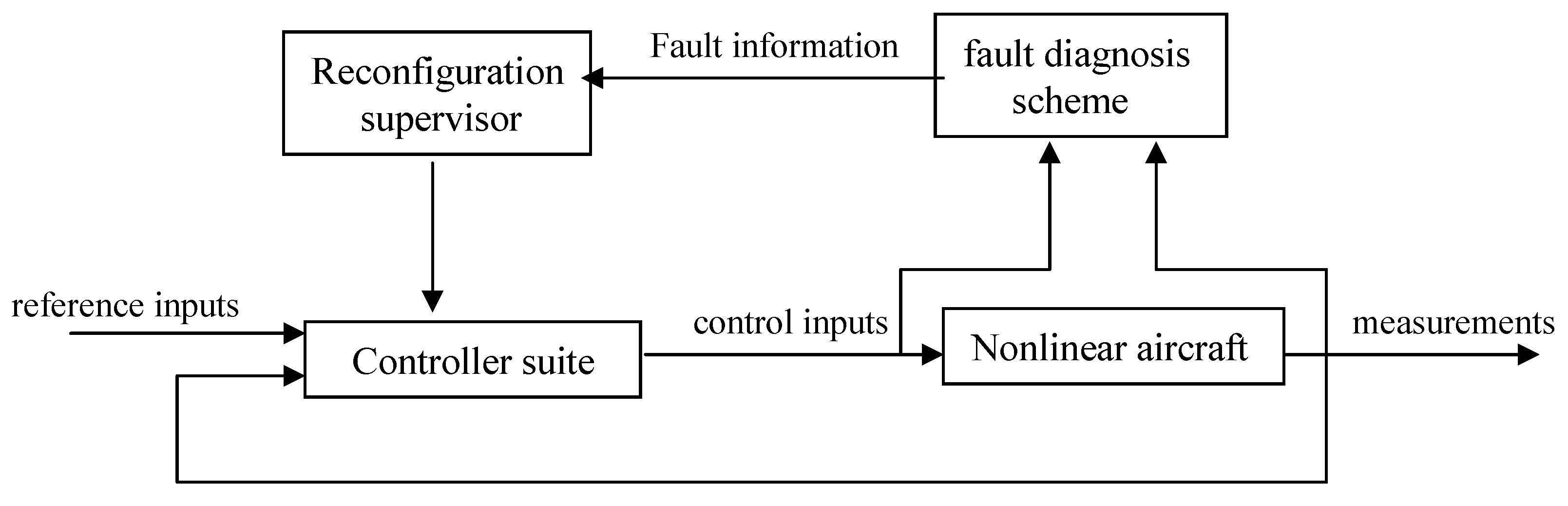
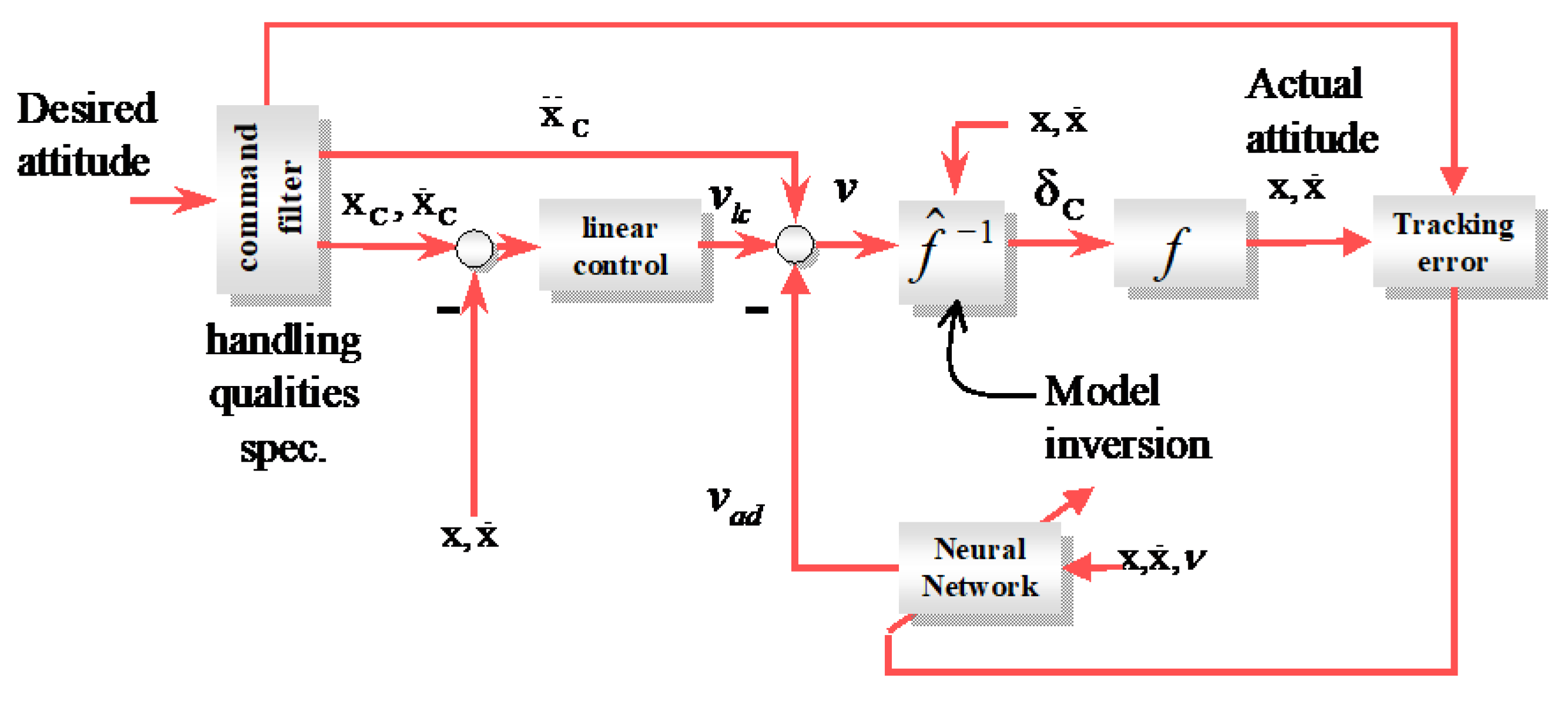
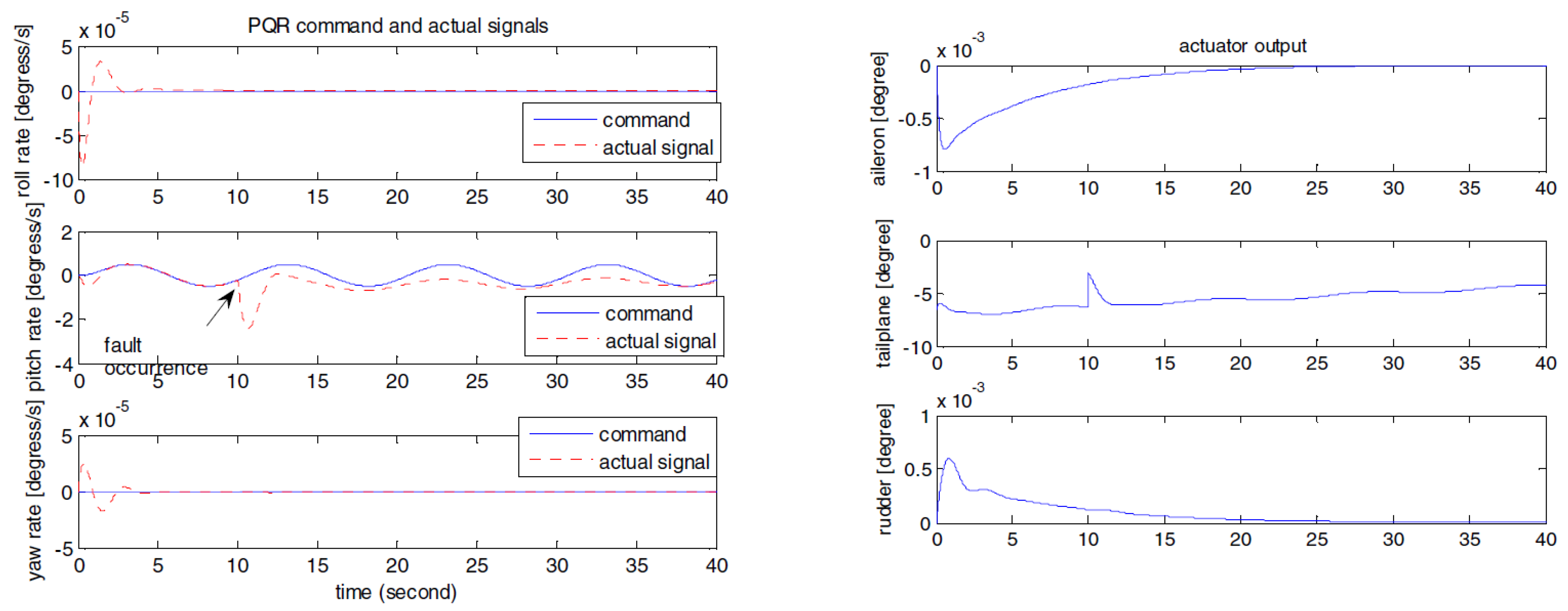
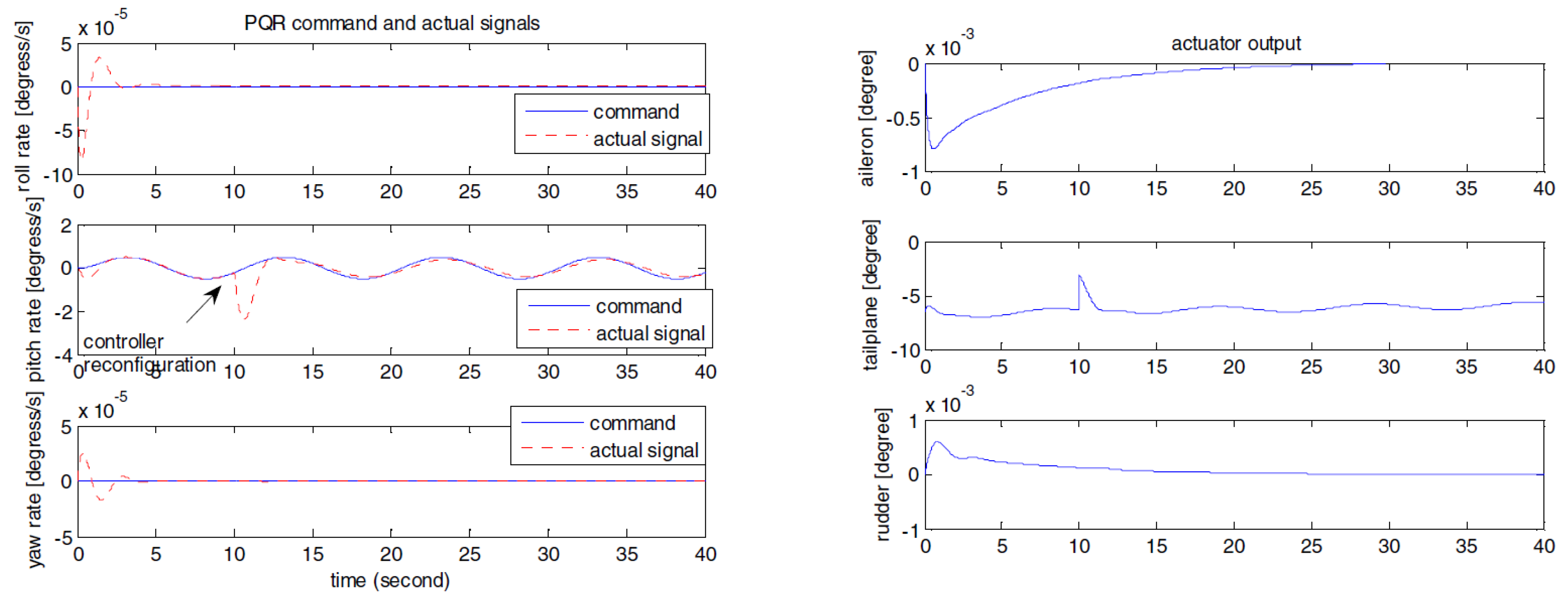
6. Robust and Fault-Tolerant Control
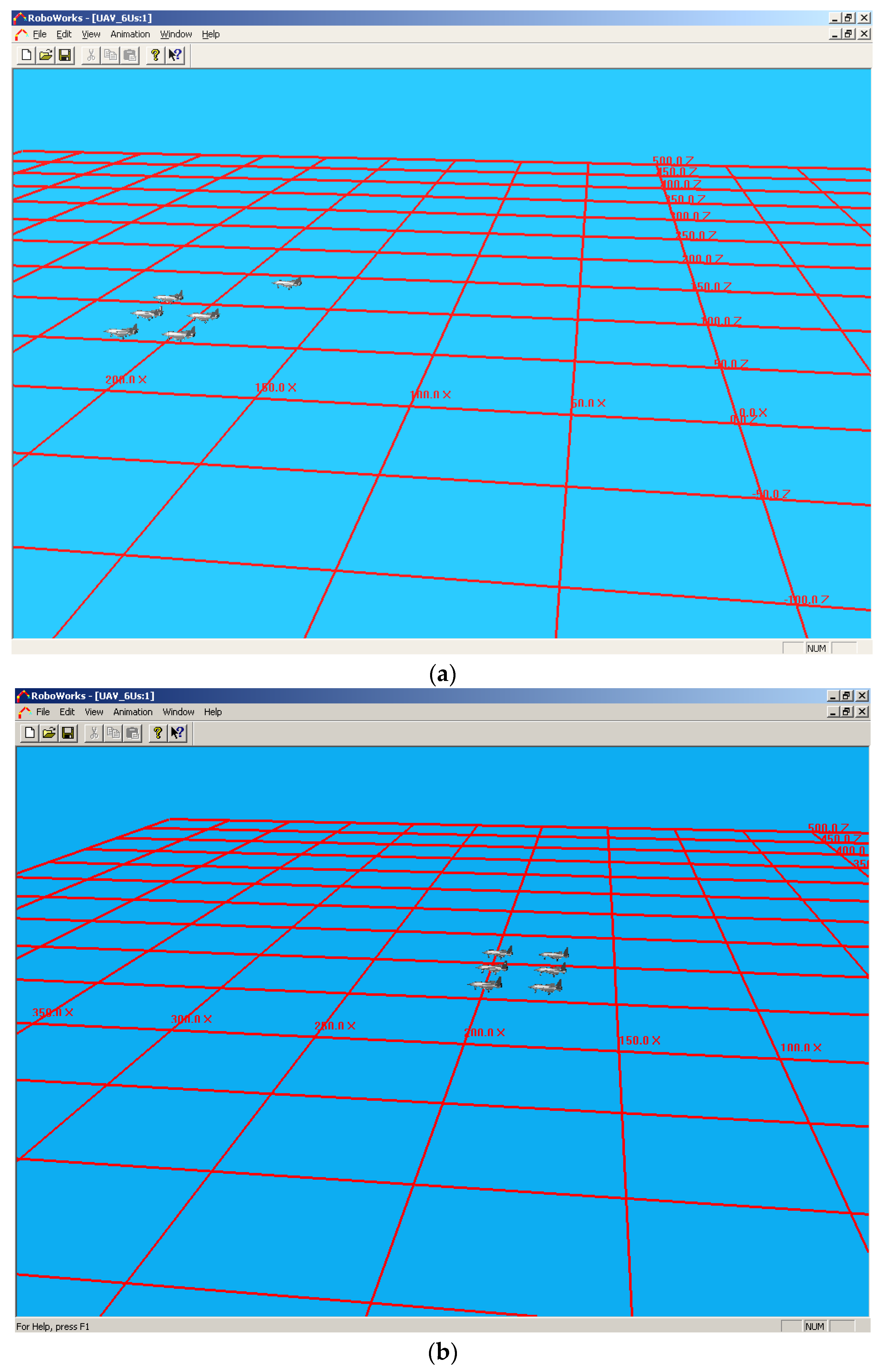
7. Contingency Planning
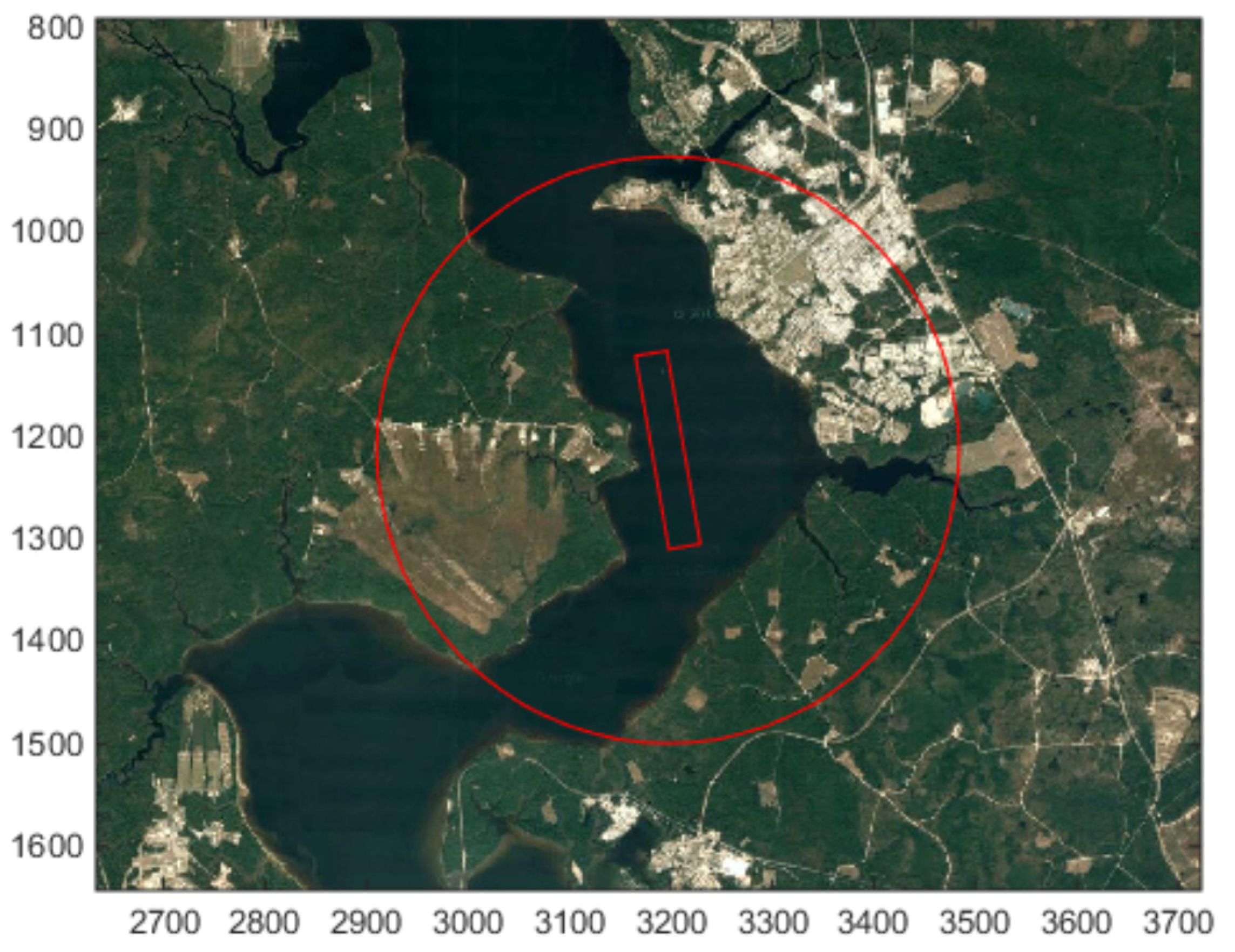
7.1. Preprocessing
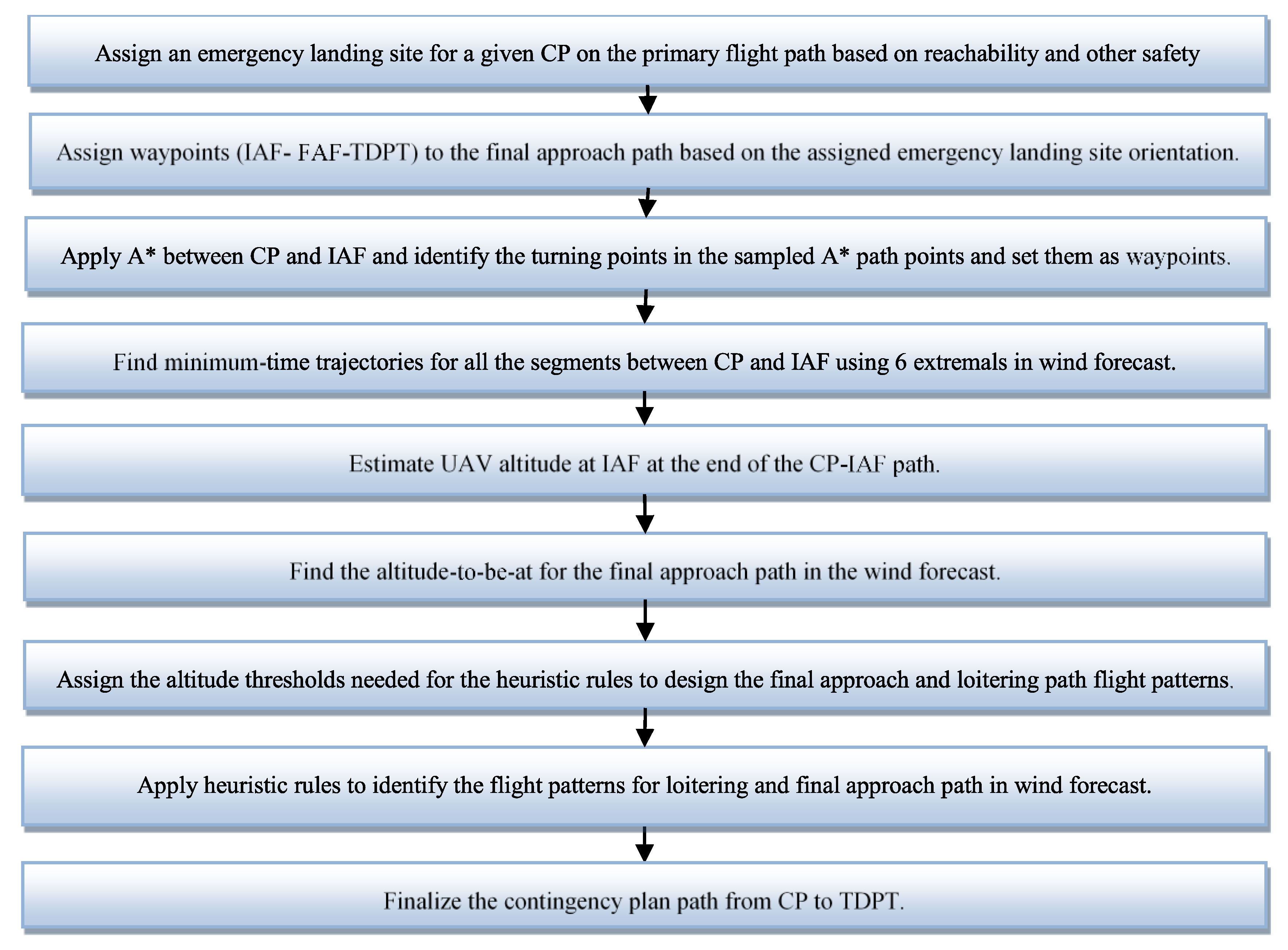
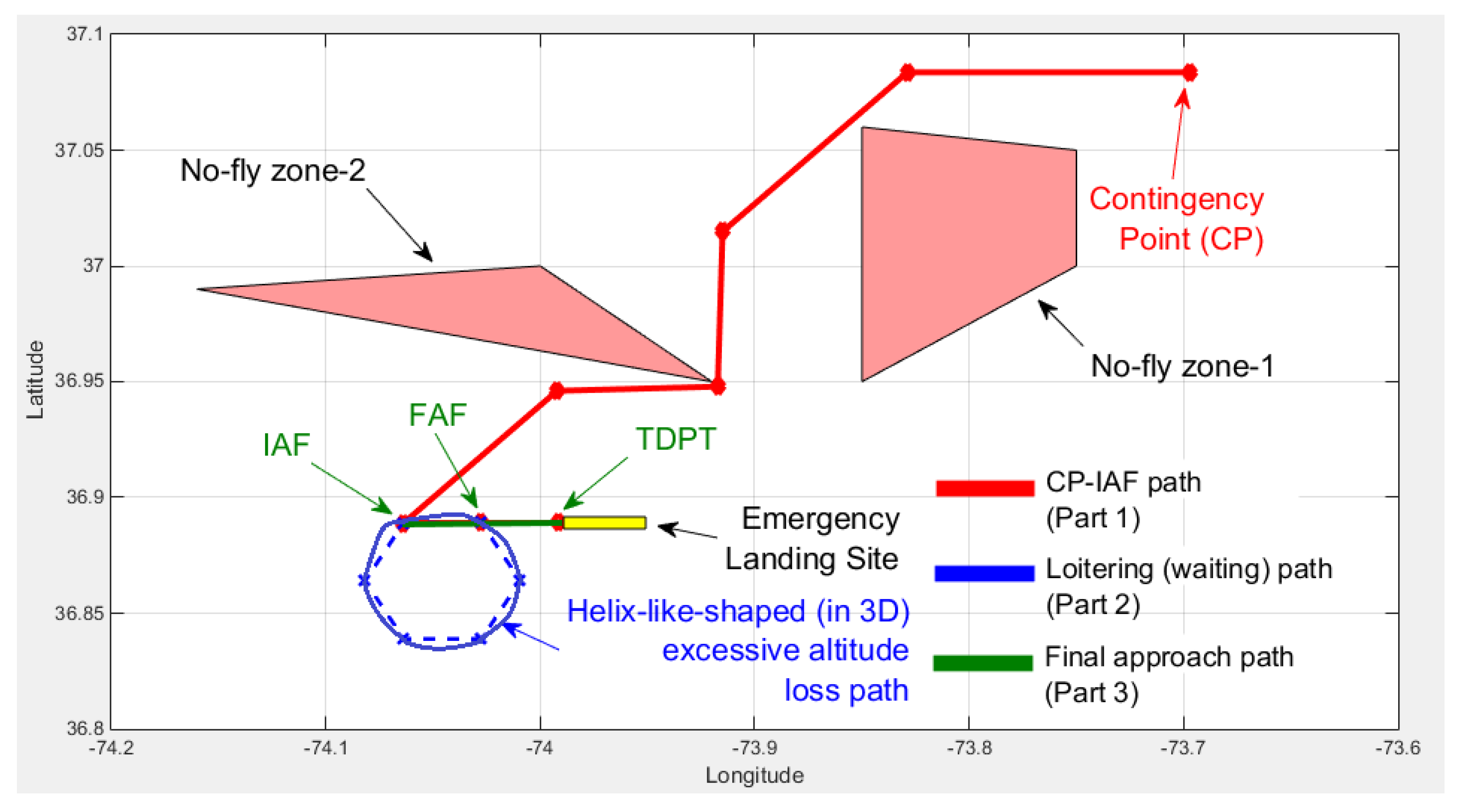
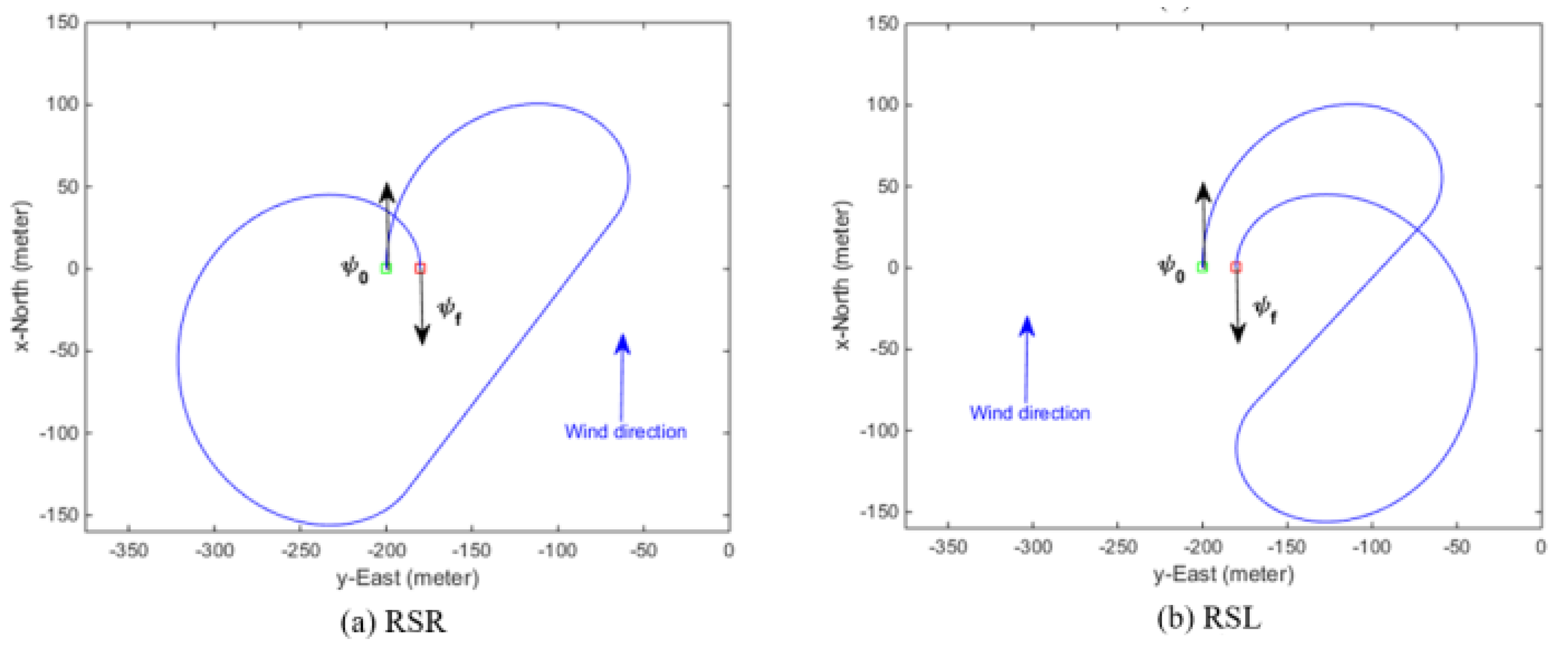
7.2. Contingency Plan Generation
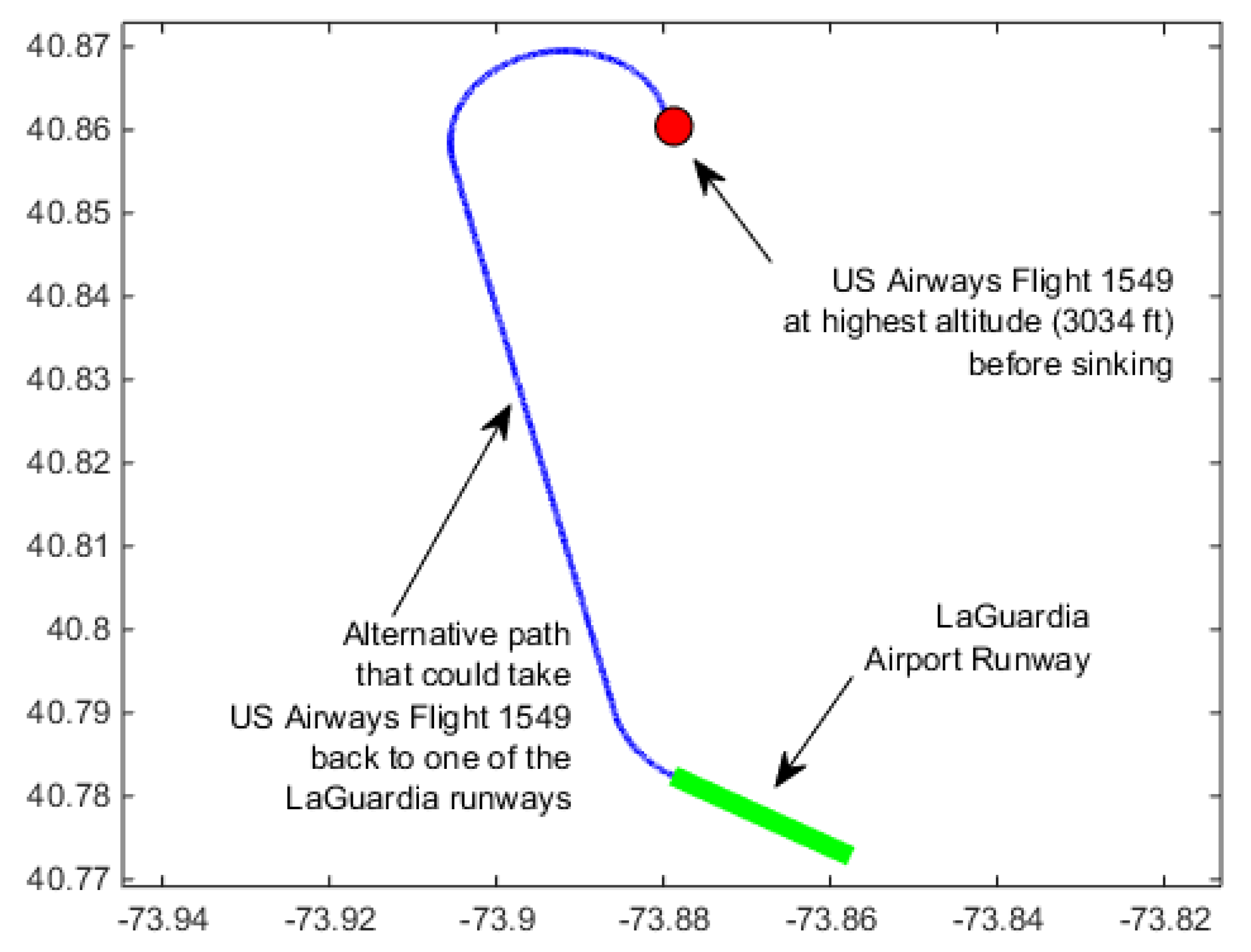
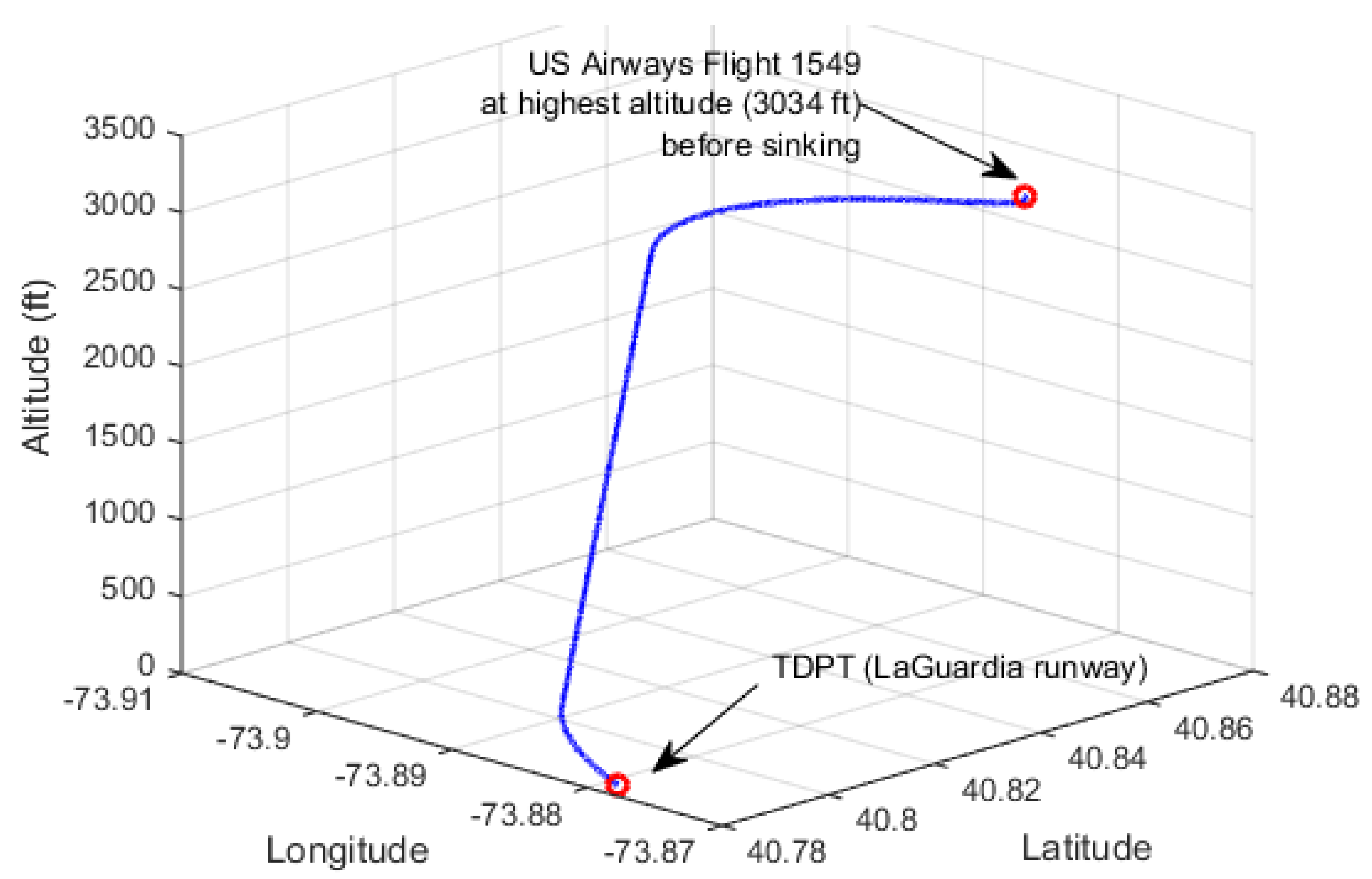
7.3. Emergency Landing in Hudson River
8. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Tvaryanas, A.P.; Thompson, B.T.; Constable, S.H. US military unmanned aerial vehicle mishaps: Assessment of the role of human factors using HFACS. In USAF 311th Performance Enhancement Directorate; Technical Report; HSW-PE-BR-TR-2005-0001; Brooks City-Base: San Antonio, TX, USA, 2005. [Google Scholar]
- Programs, Partnerships and Opportunities. US Department of Transportation, Federal Aviation Administration. Available online: https://www.faa.gov/uas/programs_partnerships (accessed on 23 February 2018).
- Kwan, C.; Ayhan, B. Enhancing Safety of UAVs in National Airspace. In Proceedings of the IEEE 9th Annual Computing and Communication Workshop and Conference, Las Vegas, NV, USA, 7–9 January 2019. [Google Scholar]
- Choi, C.; Lee, W. Design and evaluation of voltage measurement-based sectoral diagnosis method for inverter open switch faults of permanent magnet synchronous motor drives. IET Electr. Power Appl. 2012, 6, 526–532. [Google Scholar] [CrossRef]
- Kiani, M.; Lee, W.; Kenarangui, R.; Fahimi, B. Detection of Rotor Faults in Synchronous Generators. In Proceedings of the IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives, Cracow, Poland, 6–8 September 2007; pp. 266–271. [Google Scholar]
- Zhang, G.; Kwan, C.; Xu, R.; Vichare, N.; Pecht, M. An Enhanced Prognostic Model for Intermittent Failures in Digital Electronics. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; pp. 1–8. [Google Scholar]
- Zhao, X.; Qian, T.; Mei, G.; Kwan, C.; Zane, R.; Walsh, C.; Paing, T.; Popovic, Z. Active health monitoring of an aircraft wing with an embedded piezoelectric sensor/actuator network: II. Wireless approaches. J. Smart Mater. Struct. 2007, 16, 1218–1225. [Google Scholar] [CrossRef]
- Zhao, X.; Gao, H.; Zhang, G.; Ayhan, B.; Yan, F.; Kwan, C.; Rose, J.L. Active health monitoring of an aircraft wing with embedded piezoelectric sensor/actuator network: I. Defect detection, localization and growth monitoring. J. Smart Mater. Struct. 2007, 16, 1208–1217. [Google Scholar] [CrossRef]
- Kwan, C.; Xu, R. A note on simultaneous isolation of sensor and actuator faults. IEEE Trans. Control Syst. Technol. 2004, 12, 183–192. [Google Scholar] [CrossRef]
- Xu, R.; Kwan, C. Robust Isolation of Sensor Failures. Asian J. Control 2008, 5, 12–23. [Google Scholar] [CrossRef]
- Qin, S.J.; Li, W. Detection, identification, and reconstruction of faulty sensors with maximized sensitivity. AIChE J. 1999, 45, 1963–1976. [Google Scholar] [CrossRef]
- Dunia, R.; Qin, S.J. Joint diagnosis of process and sensor faults using principal component analysis. Control Eng. Pract. 1998, 6, 457–469. [Google Scholar] [CrossRef]
- Li, W.; Yue, H.; Valle-Cervantes, S.; Qin, S. Recursive PCA for adaptive process monitoring. J. Process Control 2000, 10, 471–486. [Google Scholar] [CrossRef]
- Lee, J.-M.; Qin, S.J.; Lee, I.-B. Fault detection and diagnosis based on modified independent component analysis. AIChE J. 2006, 52, 3501–3514. [Google Scholar] [CrossRef]
- Qin, S.J. Survey on data-driven industrial process monitoring and diagnosis. Annu. Rev. Control 2012, 36, 220–234. [Google Scholar] [CrossRef]
- Gertler, J.; Singer, D. Augmented Models for Statistical Fault Isolation in Complex Dynamic Systems. In Proceedings of the American Control Conference, Boston, MA, USA, 19–21 June 1985; pp. 317–322. [Google Scholar]
- Gertler, J.J. A numerical-structural approach to failure detection and isolation in complex plants. In Proceedings of the 1986 25th IEEE Conference on Decision and Control, Athens, Greece, 2 April 2007; pp. 1576–1580. [Google Scholar]
- Zhang, X.; Liu, Y.; Rysdyk, R.; Kwan, C.; Xu, R. An Intelligent Hierarchical Approach to Actuator Fault Diagnosis and Accommodation. In Proceedings of the 2006 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2006. [Google Scholar]
- Kuljaca, O.; Swamy, N.; Lewis, F.; Kwan, C. Design and implementation of industrial neural network controller using backstepping. IEEE Trans. Ind. Electron. 2003, 50, 193–201. [Google Scholar] [CrossRef]
- Tao, G.; Kokotovic, P. Adaptive Control of Systems with Actuator and Sensor Nonlinearities; John Wiley & Sons: Hoboken, NJ, USA, 1996. [Google Scholar]
- Yeung, K.S.; Cheng, C.C.; Kwan, C. A Unifying Design of Classical and Sliding Controllers. IEEE Trans. Autom. Control 1993, 38, 1422–1426. [Google Scholar] [CrossRef]
- Ioannou, P.; Sun, J. Robust Adaptive Control; Dover Publications: Mineola, NY, USA, 2012. [Google Scholar]
- Kwan, C.; Xu, H.; Lewis, F.L. Robust Spacecraft Attitude Control Using Adaptive Fuzzy Logic. Int. J. Syst. Sci. 2000, 31, 1217–1225. [Google Scholar] [CrossRef]
- Ciuryla, M.; Liu, Y.; Farnsworth, J.; Kwan, C.; Amitay, M. Flight Control Using Synthetic Jets on a Cessna 182 Model. J. Aircr. 2007, 44, 642–653. [Google Scholar] [CrossRef]
- Zhao, D.; Polycarpou, M.M. Distributed Fault Accommodation for a Class of Interconnected Nonlinear Systems with Event-Triggered Inter-Communications. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020. [Google Scholar]
- Zhang, K.; Jiang, B.; Yan, X.; Mao, Z.; Polycarpou, M.M. Fault-Tolerant Control for Systems with Unmatched Actuator Faults and Disturbances. In IEEE Transactions on Automatic Control; Early Access; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Khalili, M.; Zhang, X.; Cao, Y.; Polycarpou, M.M.; Parisini, T. Distributed Fault-Tolerant Control of Multiagent Systems: An Adaptive Learning Approach. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 420–432. [Google Scholar] [CrossRef]
- Keliris, C.; Polycarpou, M.M.; Parisini, T. An Adaptive Approach to Sensor Bias Fault Diagnosis and Accommodation for a Class of Input-Output Nonlinear Systems. In Proceedings of the IEEE Conference on Decision and Control (CDC), Miami Beach, FL, USA, 17–19 December 2018. [Google Scholar]
- Khalili, M.; Zhang, X.; Cao, Y.; Polycarpou, M.M.; Parisini, T. Distributed adaptive fault-tolerant leader-following formation control of nonlinear uncertain second-order multi-agent systems. Int. J. Robust Nonlinear Control 2018, 28, 4287–4308. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, R.; Kwan, C.; Haynes, L.; Yang, Y.; Polycarpou, M. Fault tolerant formation flight control of UAVs. Int. J. Veh. Auton. Syst. 2004, 2, 217. [Google Scholar] [CrossRef]
- Polycarpou, M.; Zhang, X.; Xu, R.; Yang, Y.; Kwan, C. A Neural Network Based Approach to Adaptive Fault Tolerant Flight Control. In Proceedings of the 2004 IEEE International Symposium on Intelligent Control, Taipei, Taiwan, 4 September 2004; pp. 61–66. [Google Scholar]
- Coombes, M.; Chen, W.H.; Render, P. Reachability Analysis of Landing Sites for Forced Landing of a UAS in Wind Using Trochoidal Turn Paths. In Proceedings of the International Conference on Unmanned Aircraft Systems, Piscataway, NJ, USA, 9–12 June 2015; pp. 62–71. [Google Scholar]
- Wongsaichua, W.; Lee, W.; Oraintara, S.; Kwan, C.; Zhang, F. Integrated high speed intelligent utility tie unit for disbursed/renewable generation facilities. IEEE Trans. Ind. Appl. 2005, 41, 507–513. [Google Scholar] [CrossRef]
- Jain, H.; Korkua, S.; Lee, W.J.; Kwan, C. Detection and Severity Classification of Rotor Imbalance Faults in Induction Machines. In Proceedings of the IEEE-IAS Annual Conference, Houston, TX, USA, 3–7 October 2010. [Google Scholar]
- Higgs, P.A.; Parkin, R.; Jackson, M.; Al-Habaibeh, A.; Zorriassatine, F.; Coy, J. A Survey on Condition Monitoring Systems in Industry. In Proceedings of the ASME 7th Biennial Conference on Engineering Systems Design and Analysis, Manchester, UK, 19–22 July 2004; Volume 3, pp. 163–178. [Google Scholar]
- Mohammed, A.; Norman, E.S.; Abouel, N.; Adel, A.S.; Husam, K. Overview of predictive condition based maintenance research using bibliometric indicators. J. King Saud Univ. Eng. Sci. 2019, 31, 355–367. [Google Scholar]
- Korkua, S.K.; Lee, W.-J.; Kwan, C. Design and Implementation of Zigbee based Vibration Monitoring and Analysis for Electrical Machines. In Proceedings of the International Conference on Wireless Networks—ICWN’11, Las Vegas, NV, USA, 18–21 July 2011. [Google Scholar]
- Korkua, S.; Jain, H.; Lee, W.-J.; Kwan, C. Wireless Health Monitoring System for Vibration Detection of Induction Motors. In Proceedings of the IEEE-IAS, ICPS Annual Conference, Tallahassee, FL, USA, 9–13 May 2010. [Google Scholar]
- Lai, C.T.A.; Jiang, W.; Jackson, P.R. Internet of Things enabling condition-based maintenance in elevators service. J. Qual. Maint. Eng. 2019, 25, 563–588. [Google Scholar] [CrossRef]
- Kwan, C.; Huang, H.; Islam, M.M.; Ayhan, B. Unpowered Wireless Ultrasound Generation and Sensing for Structural Health Monitoring of Composites. In Proceedings of the IEEE International Conference on Prognostics and Health Management, Seattle, WA, USA, 11–13 June 2018. [Google Scholar]
- Xu, R.; Zhang, G.; Zhang, X.; Kwan, C.; Semega, K. Sensor Validation Using Nonlinear Minor Component Analysis. In Proceedings of the Third International Symposium on Neural Networks, Lecture Notes in Computer Science, Chengdu, China, 28 May–1 June 2006. [Google Scholar]
- Zhang, X.; Polycarpou, M.M.; Xu, R.; Kwan, C. Actuator Fault Diagnosis and Accommodation for Improved Flight Safety. In Proceedings of the IEEE International Symposium on Intelligent Control and Mediterranean Conference on Control and Automation Conference, Limassol, Cyprus, 27–29 June 2005; pp. 640–645. [Google Scholar]
- Dunia, R.; Qin, J.; Edgar, T.F.; McAvoy, T.J. Identification of faulty sensors using principal component analysis. AIChE J. 1996, 42, 2797–2812. [Google Scholar] [CrossRef]
- Deluca, A.; Mattone, R. Actuator Failure Detection and Isolation Using Generalized Momenta. In Proceedings of the IEEE Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 634–639. [Google Scholar]
- Frank, P. Fault diagnosis in dynamic systems using analytical and knowledge-based redundancy: A survey and some new results. Automatica 1990, 26, 459–474. [Google Scholar] [CrossRef]
- Yi, J.; Huang, D.; He, H.; Zhou, W.; Han, Q.; Li, T. A Novel Framework for Fault Diagnosis Using Kernel Partial Least Squares Based on an Optimal Preference Matrix. IEEE Trans. Ind. Electron. 2017, 64, 4315–4324. [Google Scholar] [CrossRef]
- Yi, J.; Wu, L.; Zhou, W.; He, H.; Yao, L. A Sparse Dimensionality Reduction Approach Based on False Nearest Neighbors for Nonlinear Fault Detection. IEEE Trans. Syst. Man Cybern. Syst. 2019, 1–13. [Google Scholar] [CrossRef]
- Li, W.; Kwan, C. A Novel Approach to Sensor and Actuator Integrity Monitoring. In Proceedings of the IEEE Conference on Decision and Control, Las Vegas, NV, USA, 12–14 December 2016; pp. 2140–2145. [Google Scholar]
- Ando, T.; Kugimiya, W.; Hashimoto, T.; Momiyama, F.; Aoki, K.; Nakano, K. Lateral Control in Precision Docking Using RTK-GNSS/INS and LiDAR for Localization. IEEE Trans. Intell. Veh. 2020. [Google Scholar] [CrossRef]
- ADS-B. Available online: https://www.faa.gov/nextgen/programs/adsb/faq/ (accessed on 13 February 2021).
- Ergöçmen, B.; Yavrucuk, İ. Active Hybrid Fault Tolerant Flight Control of an UAV under Control Surface Damage. In Proceedings of the American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 4169–4174. [Google Scholar]
- Zhu, Z.; Cao, S. Back-stepping sliding mode control method for quadrotor UAV with actuator failure. J. Eng. 2019, 2019, 8374–8377. [Google Scholar] [CrossRef]
- Zheng, F.; Zhen, Z.; Gong, H. Observer-based backstepping longitudinal control for carrier-based UAV with actuator faults. J. Syst. Eng. Electron. 2017, 28, 322–337. [Google Scholar]
- Al-Madani, B.; Svirskis, M.; Narvydas, G.; Maskeliūnas, R.; Damaševičius, R. Design of Fully Automatic Drone Parachute System with Temperature Compensation Mechanism for Civilian and Military Applications. J. Adv. Transp. 2018, 2018, 1–11. [Google Scholar] [CrossRef]
- Global Hawk. Available online: https://www.reuters.com/article/us-mideast-iran-usa-factbox/factbox-the-global-hawk-drone-shot-down-by-iran-idUSKCN1TL29K (accessed on 13 February 2021).
- Ayhan, B.; Kwan, C.; Budavari, B.; Larkin, J.; Gribben, D. A Preflight Contingency Planning Approach for Fixed Wing UAVs in Full Loss of Thrust Using Wind Forecast. Sensors 2018, 19, 227. [Google Scholar] [CrossRef]
- Ayhan, B.; Kwan, C. Time-Constrained Extremal Trajectory Design for Fixed-Wing Unmanned Aerial Vehicles in Steady Wind. J. Guid. Control Dyn. 2018, 41, 1569–1576. [Google Scholar] [CrossRef]
- Ayhan, B.; Kwan, C.; Um, Y.-B.; Budavari, B.; Larkin, J. Semi-Automated Emergency Landing Site Selection Approach for UAVs. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1892–1906. [Google Scholar] [CrossRef]
- Ayhan, B.; Kwan, C.; Budavari, B.; Larkin, J.; Gribben, D. Path Planning for UAVs with Engine Failure in the Presence of Winds. In Proceedings of the Industrial Electronics Society, IECON 2018-44th Annual Conference of the IEEE, Washington, DC, USA, 21–23 October 2018. [Google Scholar]
- Ayhan, B.; Kwan, C. A Comparative Study of Two Approaches for UAV Emergency Landing Site Surface Type Estimation. In Proceedings of the Industrial Electronics Society, IECON 2018-44th Annual Conference of the IEEE, Washington, DC, USA, 21–23 October 2018. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Primary Actuator | Secondary Actuator | Tertiary Actuator | |
|---|---|---|---|
| Roll Channel | Aileron | Rudder & Asymmetric Engine Thrust | N/A |
| Pitch Channel | Tailplane | Symmetric Aileron | Symmetric Engine Thrust |
| Yaw Channel | Rudder | Asymmetric Engine |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwan, C. Safety Enhancement of UAVs from the Signal Processing’s Perspectives: A Bird’s Eye View. Drones 2021, 5, 16. https://doi.org/10.3390/drones5010016
Kwan C. Safety Enhancement of UAVs from the Signal Processing’s Perspectives: A Bird’s Eye View. Drones. 2021; 5(1):16. https://doi.org/10.3390/drones5010016
Chicago/Turabian StyleKwan, Chiman. 2021. "Safety Enhancement of UAVs from the Signal Processing’s Perspectives: A Bird’s Eye View" Drones 5, no. 1: 16. https://doi.org/10.3390/drones5010016
APA StyleKwan, C. (2021). Safety Enhancement of UAVs from the Signal Processing’s Perspectives: A Bird’s Eye View. Drones, 5(1), 16. https://doi.org/10.3390/drones5010016