Inter-UAV Routing Scheme Testbeds


 ,
,  ,
, 
Abstract
1. Introduction
- Node mobility (in terms of Velocity/Acceleration/Jerk)
- Topology (FANETs may function in a 3D grid in addition to the more traditional single-layered swarm topology [3]; additionally, a UAV-comprised network shall alter its topology with a significantly higher frequency, due to its nature)
- Availability of energy (arguably the most significant constrain of autonomy in an ad hoc network)
- Real time monitoring and surveillance
- Search-and-rescue operations
- Agriculture
- Relaying of communication
- Constant Position Mobility Model (NS-3 specific mobility model)
- Constant Velocity Mobility Model (NS-3 specific mobility model)
- Constant Acceleration Mobility Model (NS-3 specific mobility model)
- Hierarchical Mobility Model (NS-3 specific mobility model; a combination of specified “parent” and “child” mobility models)
- 2D Random Direction Mobility Model [19]
- 2D Random Walk Mobility Model [20]
- Random Waypoint Mobility Model [21]
- Steady State Random Waypoint Mobility Model (NS-3 specific mobility model; uses stationary instead of random distribution for initial speed, pause and position)
- Waypoint Mobility Model (NS-3 specific mobility model)
- Engaging in FANET-specific routing protocol and mobility model analysis
- Proposing a universal routing scheme testbed
- Making said universal testbed completely open-source for other researchers to utilize and improve
2. Ad Hoc Routing
2.1. Testbed-Friendly Ad Hoc Routing Protocols
- OLSR (usually implemented via OLSRd)
- Ad-hoc On-demand Distance Vector Routing (AODV)
- Hybrid Wireless Mesh Protocol (HWMP)
- BATMAN
2.1.1. OLSR
2.1.2. AODV
2.1.3. HWMP
2.1.4. BATMAN
- Originator (i.e., source) address
- Destination address
- Link flag
- Time To Live (TTL)
2.2. Mobility Models
2.2.1. Gauss-Markov
2.2.2. Paparazzi
2.2.3. Semi Random Circular
2.2.4. Random Waypoint
3. FANET Testbeds
- Measurement of computational capacity required for routing and load balancing
- Measurement of environmental effects on communication and link quality
- Measurement of transmission-related node energy expenditure
- Measurement of mobility-stemming effects on overhead and computational demand
- Measurement of security methods’ and packet encryption/decryption (CPU-intensive tasks) effects on availability of processing power
3.1. Existing Routing Scheme Testbeds
3.2. Proposal of an Embedded Routing Scheme Testbed
- Meant for evaluation using stationary nodes
- Specifically designed for a type of UAV the developers saw fit
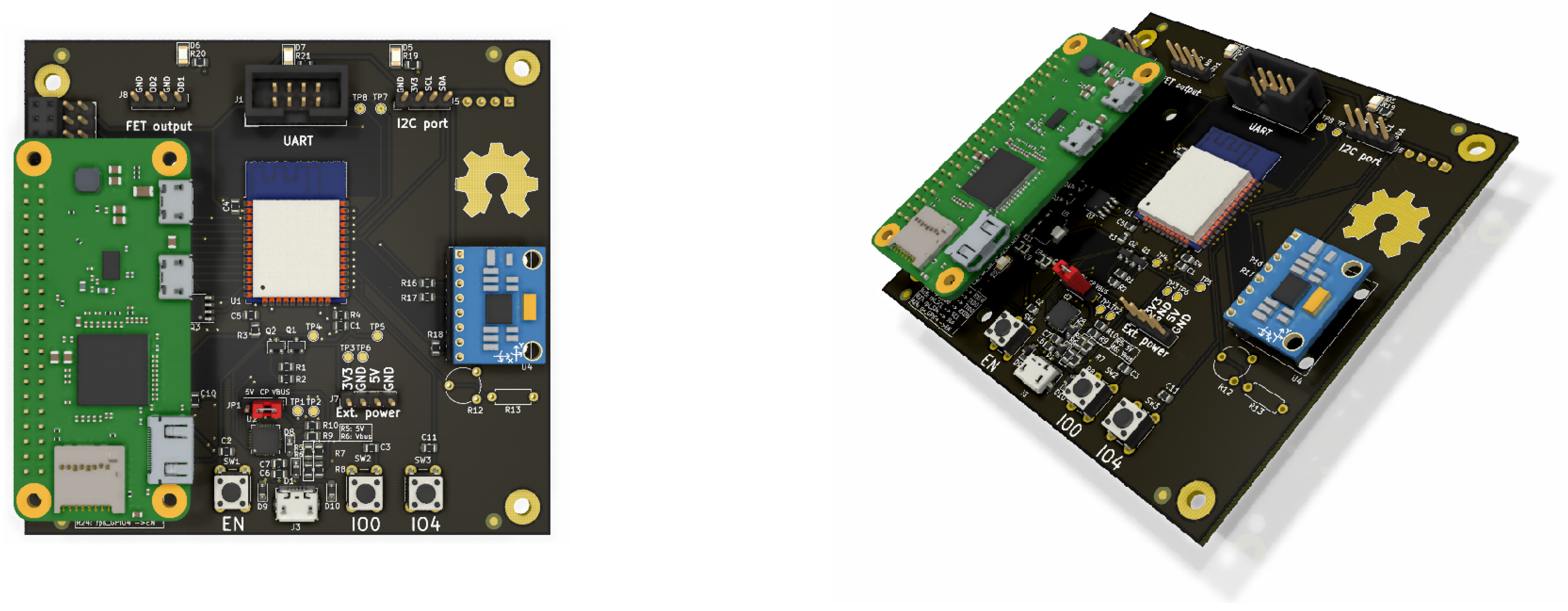
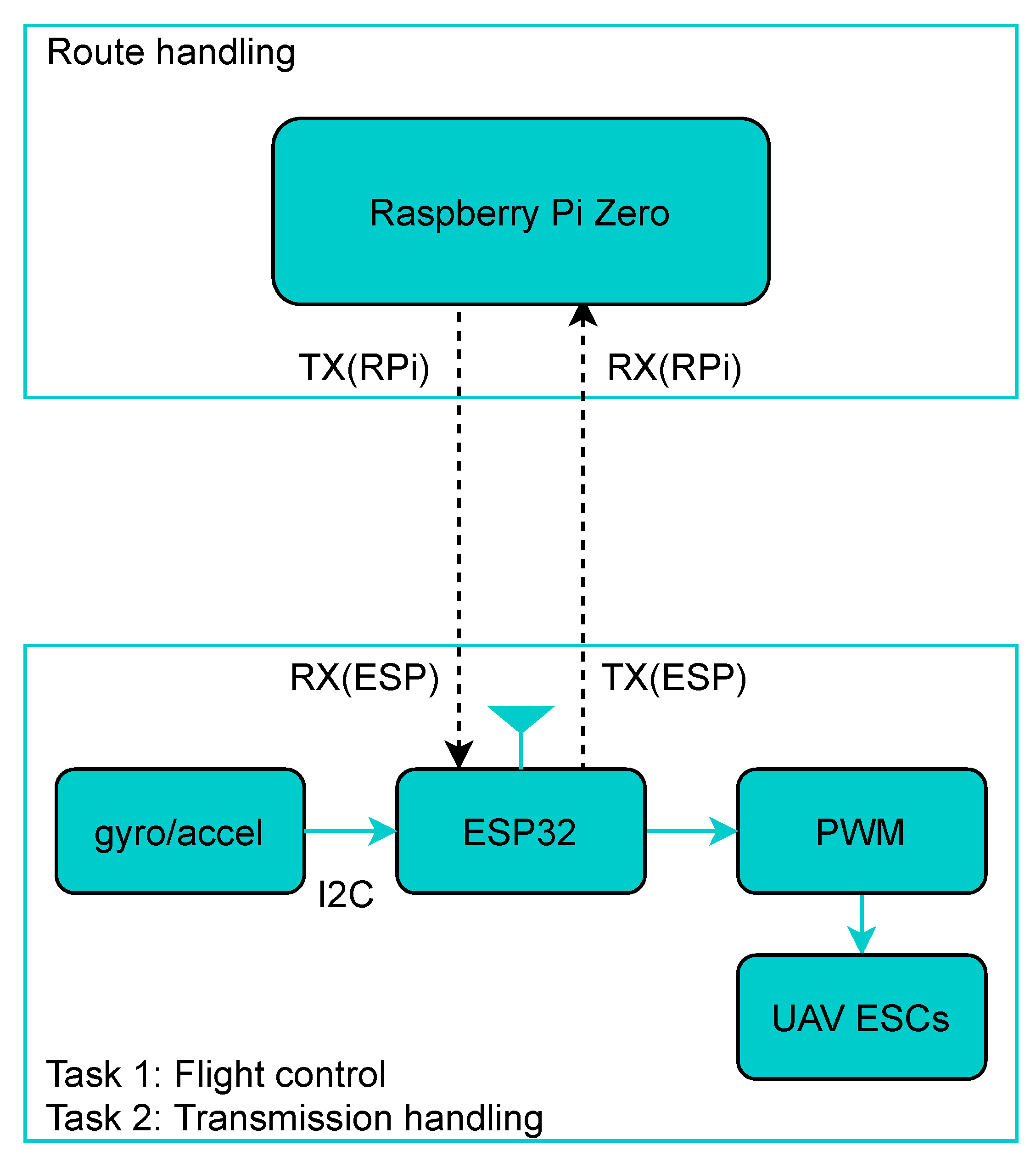
- A computing platform on which the desired routing protocol shall be installed
- A dedicated 802.11 WiFi antenna
- A gyroscope/accelerometer which shall enable the platform to function as a standalone flight controller
- A companion microcontroller implementing the flight control logic without burdening the main computing platform with unnecessary tasks
- esp_wifi_set_protocol (ifx, WIFI_PROTOCOL_LR);
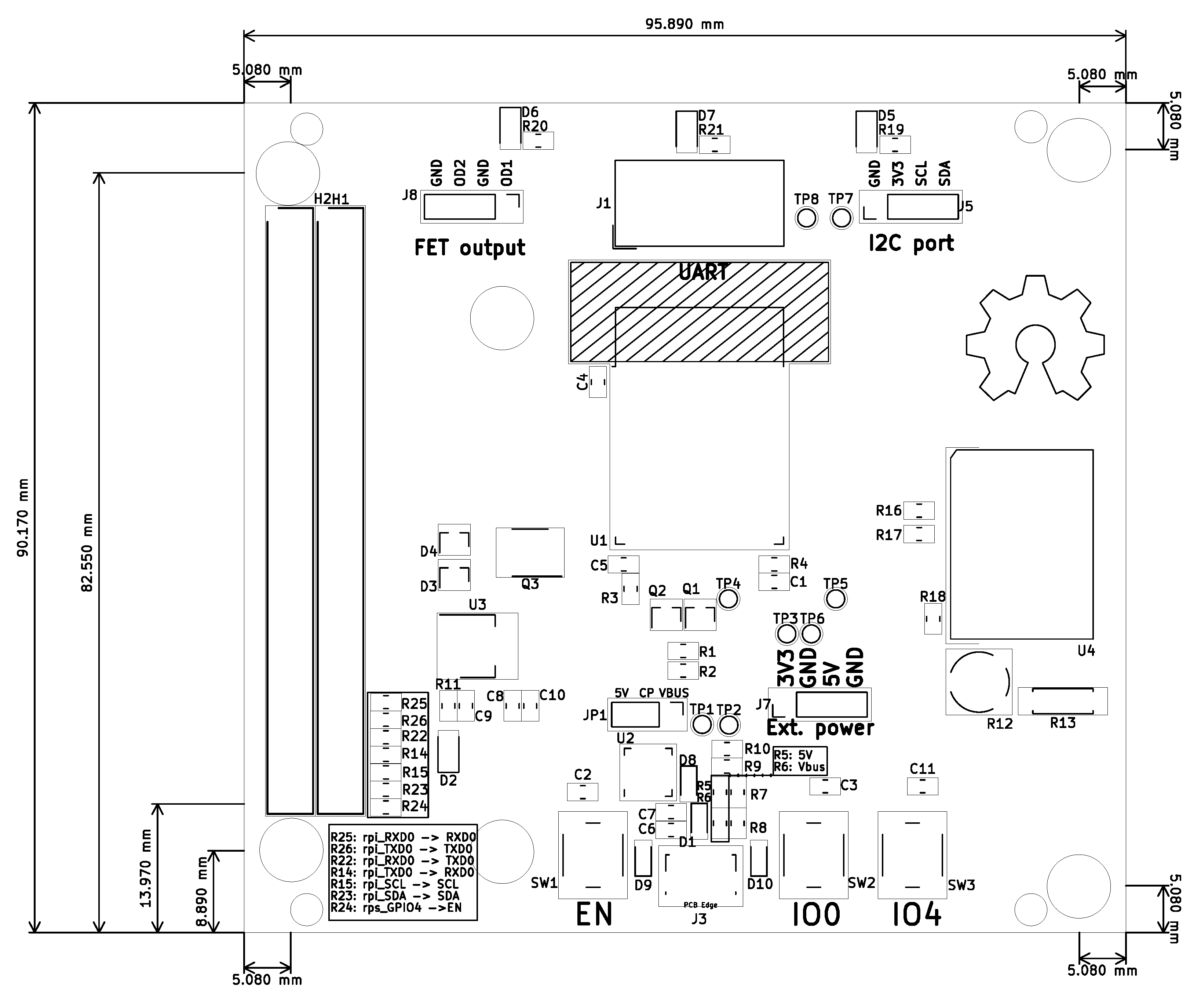
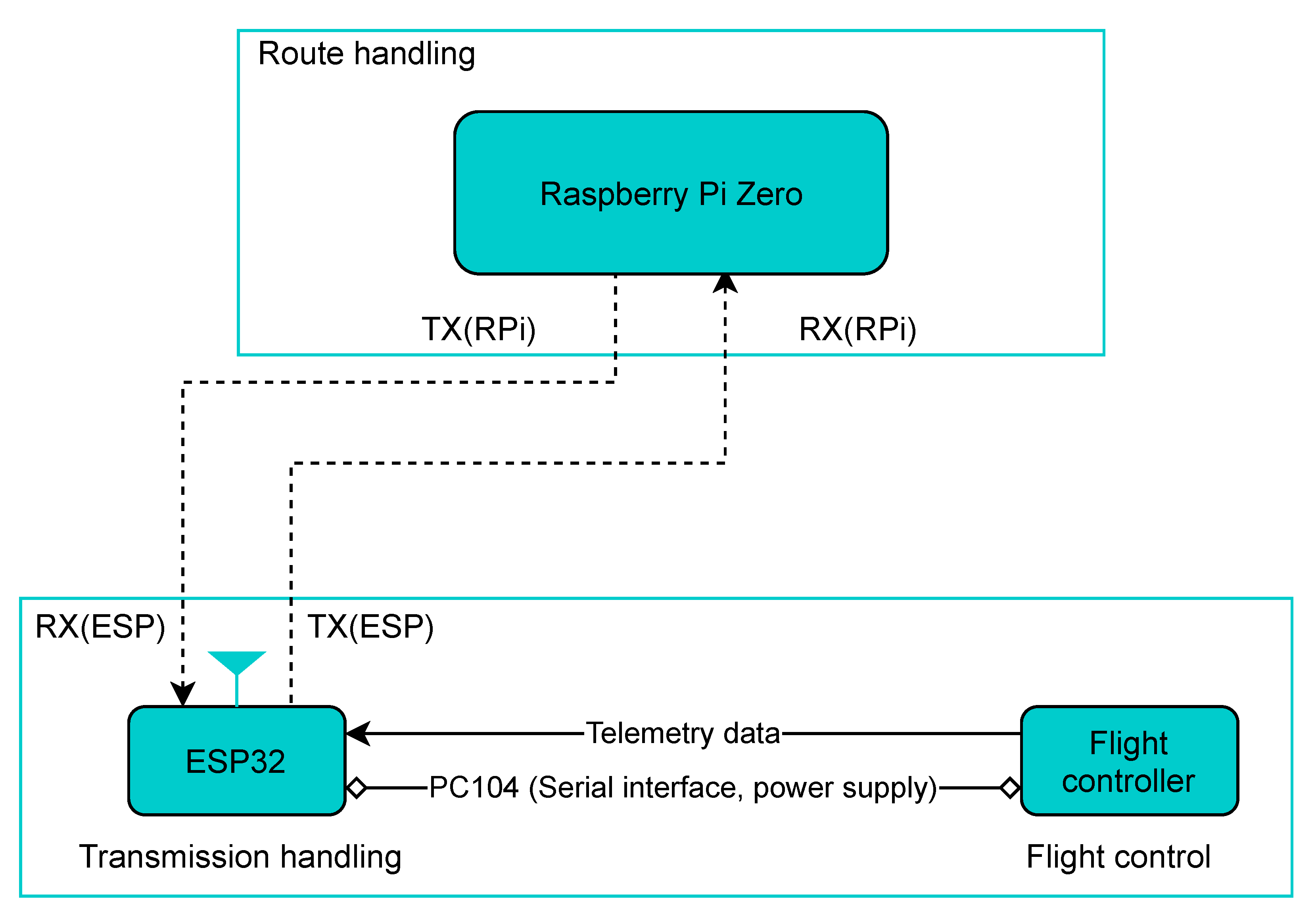
- Usage of a (traditionally 104-pin) connector
- Strictly defined PCB dimensions (90 × 96 mm) with 13 mm optional extra space for additional connectors
- Four mounting holes in predefined positions
4. Findings and Discussion
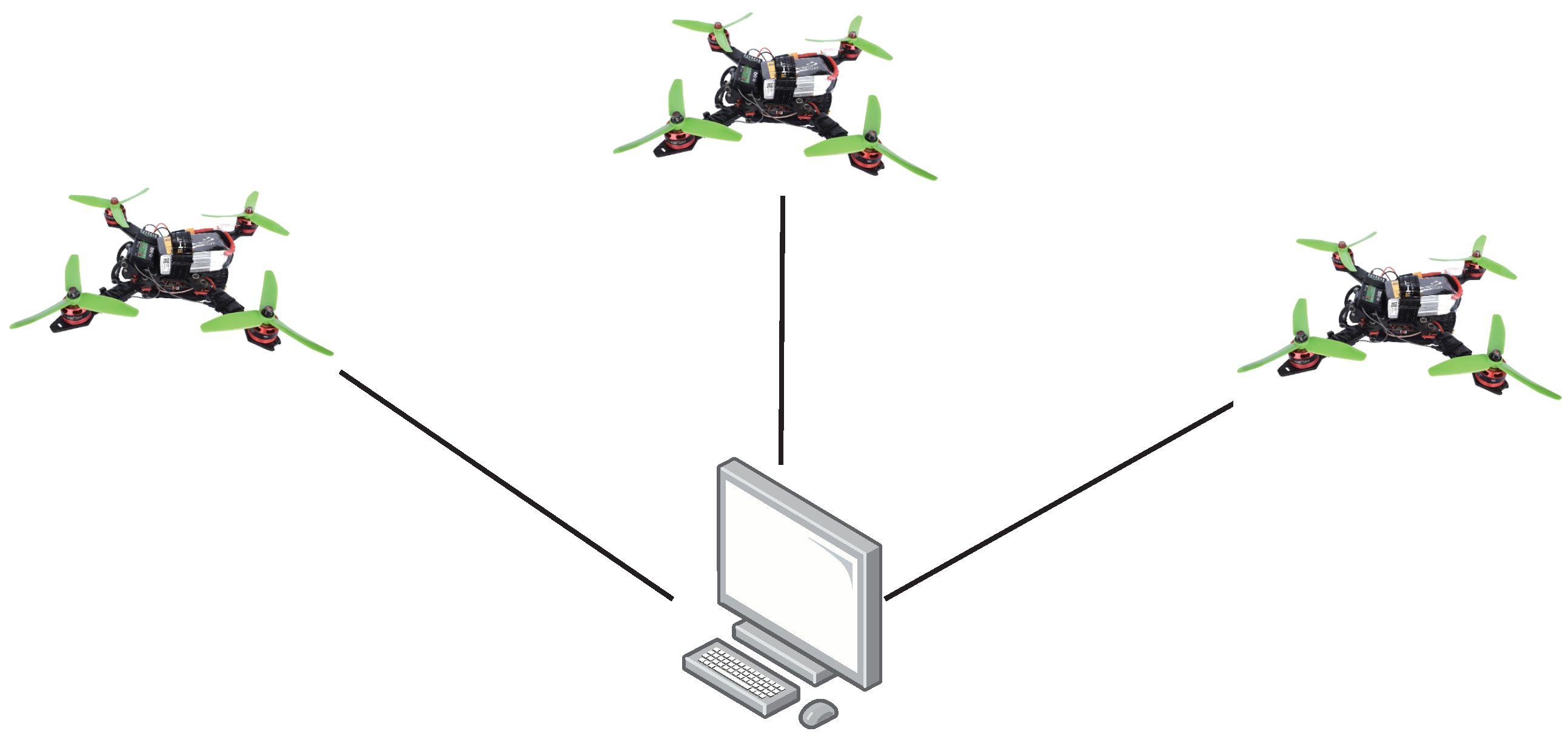
4.1. Standalone Aerial Mode
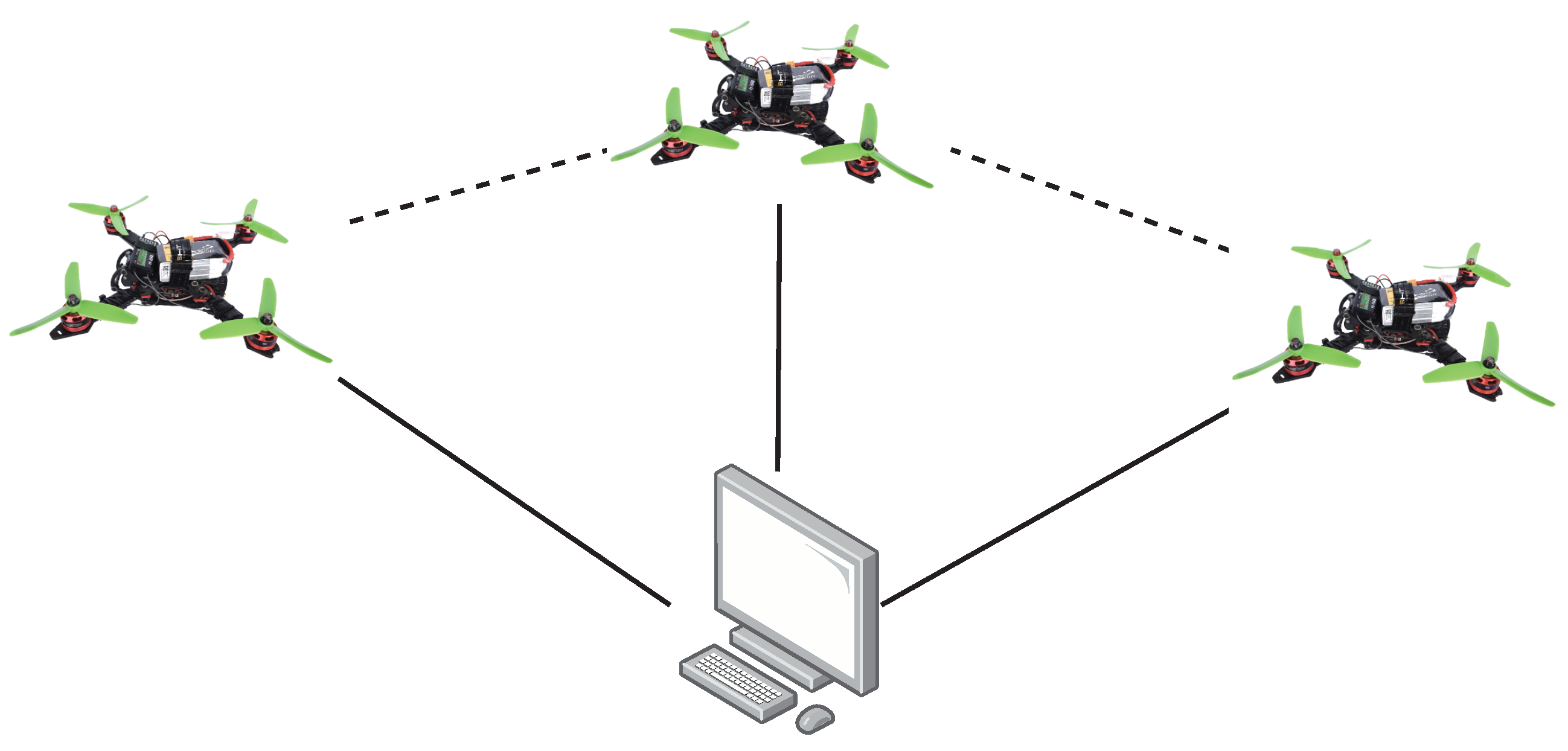
4.2. Supplementary Aerial Mode
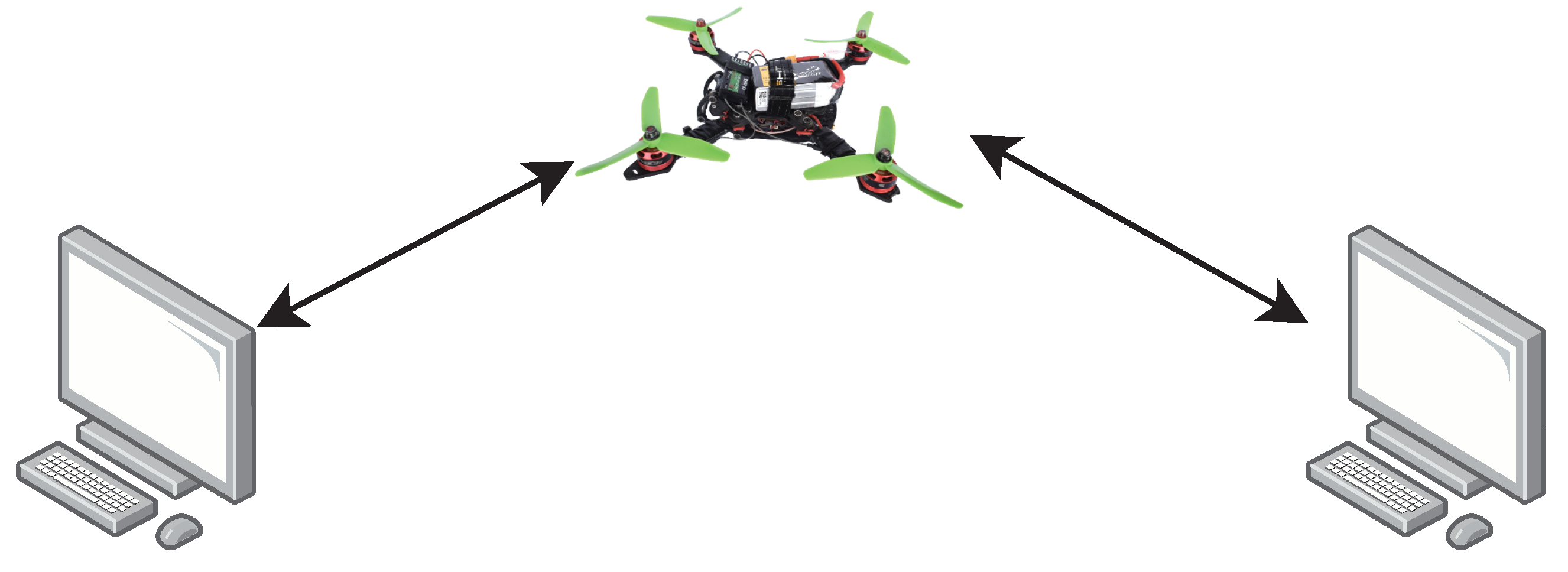
4.3. Stationary/VANET Mode
5. Conclusions and Future Work
- A standardized hardware prototype capable of supporting all routing protocols currently implemented in the Linux kernel
- Component interface modes as a function of desired evaluation framework
- Link establishment between two modules
- Formation of ESP-Now packets using dummy data harvested from the MPU6050 gyroscope/accelerometer
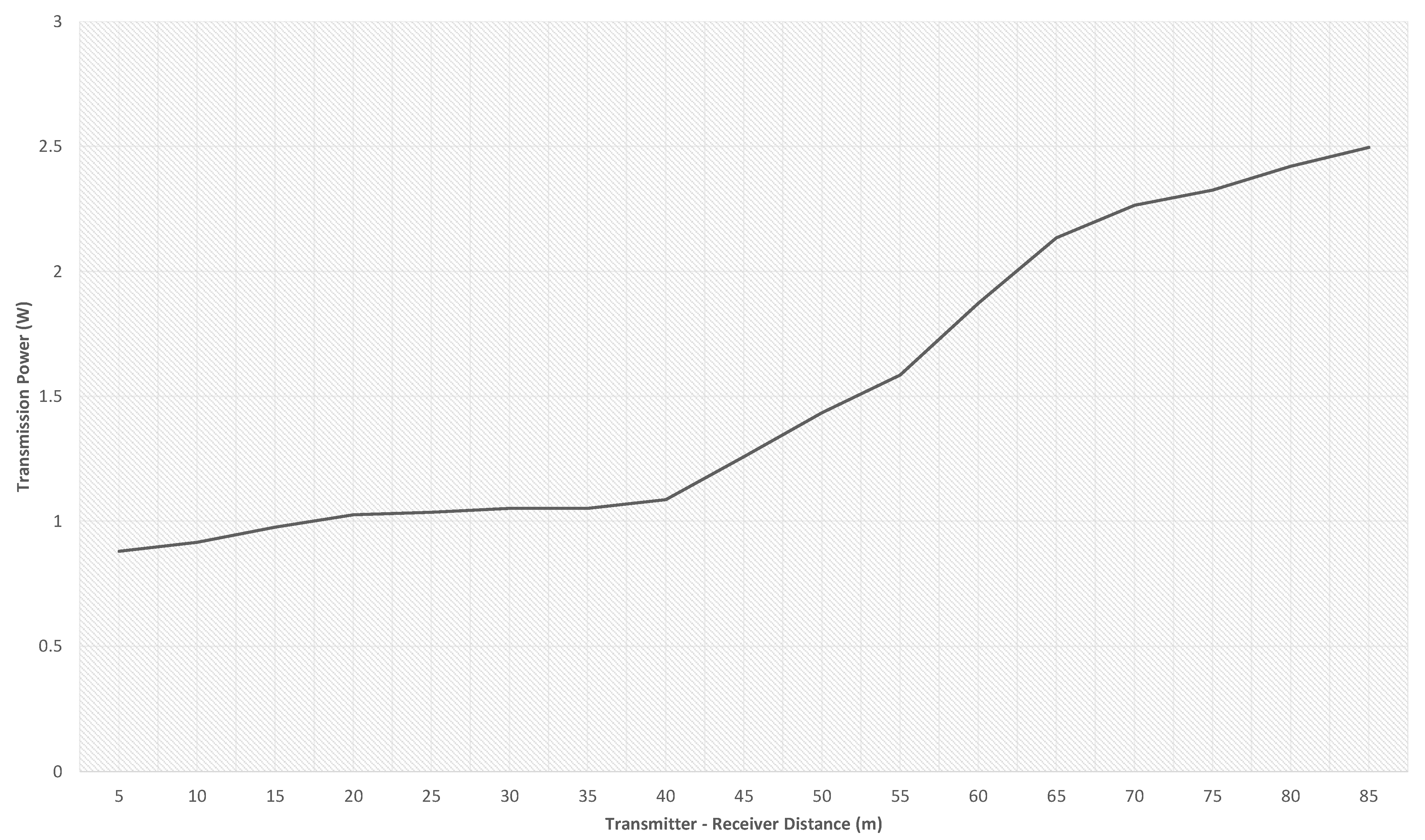
- Communication between a constantly increasing distance (5 m–85 m)
- Measurement of the transmitting module’s power consumption at 5-m intervals
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Oubbati, O.S.; Atiquzzaman, M.; Lorenz, P.; Tareque, M.H.; Hossain, M.S. Routing in flying Ad Hoc networks: Survey, constraints, and future challenge perspectives. IEEE Access 2019, 7, 81057–81105. [Google Scholar] [CrossRef]
- Khan, M.F.; Yau, K.L.A.; Noor, R.M.; Imran, M.A. Routing schemes in FANETs: A survey. Sensors 2020, 20, 38. [Google Scholar] [CrossRef]
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV Communication Networks Issues: A Review. Arch. Comput. Methods Eng. 2020, 1–21. [Google Scholar] [CrossRef]
- Di Felice, M.; Trotta, A.; Bedogni, L.; Chowdhury, K.R.; Bononi, L. Self-organizing aerial mesh networks for emergency communication. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, PIMRC, Washington, DC, USA, 2–5 September 2014; pp. 1631–1636. [Google Scholar] [CrossRef]
- Maza, I.; Caballero, F.; Capitán, J.; Martínez-De-Dios, J.R.; Ollero, A. Experimental results in multi-UAV coordination for disaster management and civil security applications. J. Intell. Robot. Syst. Theory Appl. 2011, 61, 563–585. [Google Scholar] [CrossRef]
- Nikitas, A.; Michalakopoulou, K.; Njoya, E.T.; Karampatzakis, D. Artificial intelligence, transport and the smart city: Definitions and dimensions of a new mobility era. Sustainability 2020, 12, 2789. [Google Scholar] [CrossRef]
- Cameron, S.; Hailes, S.; Julier, S.; McClean, S.; Parr, G.; Trigoni, N.; Ahmed, M.; McPhillips, G.; de Nardi, R.; Nie, J.; et al. SUAAVE: Combining aerial robots and wireless networking. In Proceedings of the 25th Bristol International UAV Systems Conference, Department of Aerospace Engineering, University of Bristol, 1-9 Old Park Hill, Bristol, Avon, UK, 12–14 April 2010; pp. 1–14. [Google Scholar]
- Ollero, A.; Kondak, K.; Previnaire, E.; Maza, I.; Caballero, F.; Bernard, M.; Martinez, J.R.; Marrón, P.; Herrmann, K.; Van Hoesel, L.; et al. Integration of aerial robots and wireless sensor and actuator networks. The AWARE project. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 1104–1105. [Google Scholar] [CrossRef]
- Lagkas, T.; Argyriou, V.; Bibi, S.; Sarigiannidis, P. UAV IoT framework views and challenges: Towards protecting drones as “things”. Sensors 2018, 18, 4015. [Google Scholar] [CrossRef] [PubMed]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Kakamoukas, G.; Sariciannidis, P.; Livanos, G.; Zervakis, M.; Ramnalis, D.; Polychronos, V.; Karamitsou, T.; Folinas, A.; Tsitsiokas, N. A Multi-collective, IoT-enabled, Adaptive Smart Farming Architecture. In Proceedings of the IST 2019—IEEE International Conference on Imaging Systems and Techniques, Abu Dhabi, UAE, 9–10 December 2019. [Google Scholar] [CrossRef]
- Triantafyllou, A.; Sarigiannidis, P.; Bibi, S. Precision agriculture: A remote sensing monitoring system architecture. Information 2019, 10, 348. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Egarguin, N.J.; Jackson, D.R.; Onofrei, D.; Leclerc, J.; Becker, A. Adaptive beamforming using scattering from a drone swarm. In Proceedings of the 2020 IEEE Texas Symposium on Wireless and Microwave Circuits and Systems: Making Waves in Texas, WMCS 2020, Waco, TX, USA, 26–28 May 2020. [Google Scholar] [CrossRef]
- Mann, S.; Pierce, C.; Hernandez, J.; Li, Q.; Zheng, B.C.; Xin Xiang, Y. Drone Swarms for Sensing-of-Sensing. Proc. IEEE Sens. 2019, 2019, 23–26. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Networking models in flying Ad-hoc networks (FANETs): Concepts and challenges. J. Intell. Robot. Syst. Theory Appl. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Guo, Y.; Li, X.; Yousefi’zadeh, H.; Jafarkhani, H. UAV-aided cross-layer routing for MANETs. In Proceedings of the IEEE Wireless Communications and Networking Conference, WCNC, Paris, France, 1–4 April 2012; pp. 2928–2933. [Google Scholar] [CrossRef]
- Kuiper, E.; Nadjm-Tehrani, S. Mobility models for UAV group reconnaissance applications. In Proceedings of the 2006 International Conference on Wireless and Mobile Communications (ICWMC’06), Bucharest, Romania, 29–31 July 2006; pp. 2–8. [Google Scholar] [CrossRef]
- Camp, T.; Boleng, J.; Davies, V. A survey of mobility models for ad hoc network research. Wirel. Commun. Mob. Comput. 2002, 2, 483–502. [Google Scholar] [CrossRef]
- Guillen-Perez, A.; Cano, M.D. Flying ad hoc networks: A new domain for network communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef] [PubMed]
- Broch, J.; Maltz, D.A.; Johnson, D.B.; Hu, Y.C.; Jetcheva, J. A performance comparison of multi-hop wireless ad hoc network routing protocols. In Proceedings of the 4th Annual ACM/IEEE International Conference on Mobile Computing and Networking, New York, NY, USA, 25 October 2001; pp. 85–97. [Google Scholar] [CrossRef]
- Reed, J.M.; Abdallah, A.S.; Thompson, M.S.; MacKenzie, A.B.; DaSilva, L.A. The FINS Framework: Design and Implementation of the Flexible Internetwork Stack (FINS) Framework. IEEE Trans. Mob. Comput. 2016, 15, 489–502. [Google Scholar] [CrossRef]
- Thompson, M.; Abdallah, A.; Reed, J.; MacKenzie, A.; Dasilva, L. The FINS framework: An open source userspace networking subsystem for linux. IEEE Netw. 2014, 28, 32–37. [Google Scholar] [CrossRef]
- Abdallah, A.S.; Horvath, M.D.; Thompson, M.S.; MacKenzie, A.B.; Dasilva, L.A. Facilitating experimental networking research with the FINS framework. In Proceedings of the Annual International Conference on Mobile Computing and Networking, MOBICOM, New York, NY, USA, 19 September 2011; pp. 103–104. [Google Scholar] [CrossRef]
- Miya, T.; Ohshima, K.; Kitaguchi, Y.; Yamaoka, K. Experimental Analysis of Communication Relaying Delay in Low-Energy Ad-hoc Networks. arXiv 2020, arXiv:2010.15572, 1–6. [Google Scholar]
- Kaysina, I.A.; Vasiliev, D.S.; Abilov, A.; Meitis, D.S.; Kaysin, A.E. Performance evaluation testbed for emerging relaying and coding algorithms in Flying Ad Hoc Networks. In Proceedings of the Moscow Workshop on Electronic and Networking Technologies, MWENT, Moscow, Russia, 14–16 March 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Kim, G.H.; Nam, J.C.; Mahmud, I.; Cho, Y.Z. Multi-drone control and network self-recovery for flying Ad Hoc Networks. In Proceedings of the International Conference on Ubiquitous and Future Networks, ICUFN, Vienna, Austria, 5–8 July 2016; pp. 148–150. [Google Scholar] [CrossRef]
- Shan, F.; Luo, J.; Xiong, R.; Wu, W.; Li, J. Looking before Crossing: An Optimal Algorithm to Minimize UAV Energy by Speed Scheduling with a Practical Flight Energy Model. In Proceedings of the IEEE INFOCOM, Toronto, ON, Canada, 6–9 July 2020; pp. 1758–1767. [Google Scholar] [CrossRef]
- Hamdaoui, B.; Sinky, H. Optimized link state routing for quality-of-service provisioning: Implementation, measurement, and performance evaluation. Wirel. Commun. Mob. Comput. 2015, 14, 421–430. [Google Scholar] [CrossRef]
- Brown, T.; Doshi, S.; Jadhav, S.; Henkel, D.; Thekkekunnel, R. A full scale wireless ad hoc network test bed. Access 2005, 7, 51–60. [Google Scholar]
- Rosati, S.; Kruzelecki, K.; Heitz, G.; Floreano, D.; Rimoldi, B. Dynamic Routing for Flying Ad Hoc Networks. IEEE Trans. Veh. Technol. 2016, 65, 1690–1700. [Google Scholar] [CrossRef]
- Karp, B.; Kung, H.T. Greedy Perimeter Stateless Routing for Wireless Networks(GPSR ). In Proceedings of the Annual International Conference on Mobile Computing and Networking, MOBICOM, Boston, MA, USA, 1 August 2000. [Google Scholar] [CrossRef]
- Medina, D.; Hoffmann, F.; Rossetto, F.; Rokitansky, C.H. North atlantic inflight internet connectivity via airborne mesh networking. In Proceedings of the IEEE Vehicular Technology Conference, San Francisco, CA, USA, 5–8 September 2011. [Google Scholar] [CrossRef]
- Lin, L.; Sun, Q.; Wang, S.; Yang, F. A geographic mobility prediction routing protocol for Ad Hoc UAV Network. In Proceedings of the 2012 IEEE Globecom Workshops, GC Wkshps 2012, Anaheim, CA, USA, 3–7 December 2012; pp. 1597–1602. [Google Scholar] [CrossRef]
- Alshabtat, A.I.; Dong, L. Low latency routing algorithm for unmanned aerial vehicles ad-hoc networks. World Acad. Sci. Eng. Technol. 2011, 80, 705–711. [Google Scholar]
- Aguilar, T.; Ghedira, M.C.; Syue, S.J.; Gauthier, V.; Afifi, H.; Wang, C.L. A Cross-Layer Design Based on Geographic Information for Cooperative Wireless Networks. In Proceedings of the 2010 IEEE 71st Vehicular Technology Conference, Taipei, Taiwan, 16–19 May 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Rosati, S.; Kruzelecki, K.; Traynard, L.; Rimoldi, B. Speed-aware routing for UAV ad-hoc networks. In Proceedings of the 2013 IEEE Globecom Workshops, GC Wkshps 2013, Atlanta, GA, USA, 9–13 December 2013; pp. 1367–1373. [Google Scholar] [CrossRef]
- Liu, J.; Ji, X.; Huang, C.; Tan, X. A novel OLSR protocol with mobility prediction. In Proceedings of the Third International Conference on Cyberspace Technology (CCT 2015), Beijing, China, 17–18 October 2015. [Google Scholar] [CrossRef]
- José, D.A.M.; Bulcão-Neto, R.F.; Patto, V.S.; Sene Júnior, I.G. OLSR fuzzy cost (OLSR-FC): An extension to olsr protocol based on fuzzy logic and applied to avoid selfish nodes. Rev. Inform. Teórica Apl. 2019, 26, 60–77. [Google Scholar] [CrossRef]
- Fan, X.; Lin, J.; Zhang, C.; Zhang, S. A cross-layer anti-jamming routing protocol for FANETS. In Proceedings of the 2018 IEEE 4th International Conference on Computer and Communications, ICCC 2018, Chengdu, China, 7–10 December 2018; pp. 301–305. [Google Scholar] [CrossRef]
- Jain, R.; Kashyap, I. An QoS Aware Link Defined OLSR (LD-OLSR) Routing Protocol for MANETS. Wirel. Pers. Commun. 2019, 108, 1745–1758. [Google Scholar] [CrossRef]
- Lavén, A.; Hjärtquist, P. Multimetric OLSR and ETT Case Study Final Report Multimetric OLSR and ETT 1 Introduction; Karlstad University: Karlstad, Sweden, 2014. [Google Scholar]
- Perkins, C.E.; Royer, E.M. Ad-hoc on-demand distance vector routing. In Proceedings of the WMCSA’99: 2nd IEEE Workshop on Mobile Computing Systems and Applications, New Orleans, LA, USA, 25–26 February 1999; pp. 90–100. [Google Scholar] [CrossRef]
- Perkins, C.E.; Watson, T.; Bhagwat, P. Highly Dynamic Destination-Sequenced Distance-Vector Routing (DSDV) for Mobile Computers. ACM SIGCOMM Comput. Commun. Rev. 1994, 24, 234–244. [Google Scholar] [CrossRef]
- Purnomo, A.; Widyawan; Najib, W.; Hartono, R.; Hartatik. Performance Comparison of Modified AODV-ETX with AODV and AODV-ETX Routing Protocol in an MANET. IOP Conf. Ser. Mater. Sci. Eng. 2019, 578, 012082. [Google Scholar] [CrossRef]
- Hou, S.; Wu, M.; Liao, W.; Wang, D. Performance comparison of AODV and DSR in MANET test-bed based on Internet of Things. In Proceedings of the 2015 IEEE 82nd Vehicular Technology Conference, VTC Fall 2015, Boston, MA, USA, 6–9 September 2015; pp. 3–7. [Google Scholar] [CrossRef]
- Jung, S.; Kim, B.; Kim, K.; Roh, B.; Ham, J. Implementation of AODV-UU on Linux 4.15 Kernel. In Proceedings of the 2019 IEEE 16th International Conference on Mobile Ad Hoc and Smart Systems Workshops, MASSW 2019, Monterey, CA, USA, 4–7 November 2019; pp. 160–161. [Google Scholar] [CrossRef]
- Nayyar, A. Flying Adhoc Network (FANETs): Simulation Based Performance Comparison of Routing Protocols: AODV, DSDV, DSR, OLSR, AOMDV and HWMP. In Proceedings of the 2018 International Conference on Advances in Big Data, Computing and Data Communication Systems, icABCD 2018, Durban, South Africa, 6–7 August 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Chissungo, E.; Blake, E.; Le, H. Performance Comparison of B.A.T.M.A.Nd and B.A.T.M.A.N-adv. In Proceedings of the Southern Africa Telecommunication Networks and Applications Conference, East London, South Africa, 3–7 September 2011; pp. 6–7. [Google Scholar]
- Lagkas, T.; Imeri, A.; Eleftherakis, G. A Pragmatic Evaluation of Distance Vector Proactive Routing in MANETs via Open Space Real-World Experiments; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Chissungo, E.; Blake, E.; Le, H. Investigation into Batmand-0.3.2 protocol performance in an indoor Mesh Potato testbed. In Proceedings of the 26th IEEE International Conference on Advanced Information Networking and Applications Workshops, WAINA 2012, Fukuoka, Japan, 26–29 March 2012; pp. 526–532. [Google Scholar] [CrossRef]
- Wang, W.; Guan, X.; Wang, B.; Wang, Y. A novel mobility model based on semi-random circular movement in mobile ad hoc networks. Inf. Sci. 2010, 180, 399–413. [Google Scholar] [CrossRef]
- Meghanathan, N. Impact of the Gauss-Markov mobility model on network connectivity, lifetime and hop count of routes for mobile Ad hoc networks. J. Netw. 2010, 5, 509–516. [Google Scholar] [CrossRef]
- Bouachir, O.; Abrassart, A.; Garcia, F.; Larrieu, N. A mobility model for UAV ad hoc network. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems, ICUAS 2014, Orlando, FL, USA, 27–30 May 2014; pp. 383–388. [Google Scholar] [CrossRef]
- Barolli, A.; Oda, T.; Barolli, L.; Takizawa, M. Experimental results of a raspberry Pi and OLSR based wireless content centric network testbed considering OpenWRT OS. In Proceedings of the International Conference on Advanced Information Networking and Applications, AINA, Crans-Montana, Switzerland, 23–25 March 2016; pp. 95–100. [Google Scholar] [CrossRef]
- Chao, H.; Cao, Y.; Chen, Y. Autopilots for Small Fixed-Wing Unmanned Air Vehicles: A Survey. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007. Technical Report. [Google Scholar]
- Amponis, G. Mesh Module GitHub Repository. 2020. Available online: https://github.com/g-ampo/mesh_module (accessed on 27 December 2020).
- LibreCube. LibreCube PC/104 Template. 2019. Available online: https://gitlab.com/librecube/support/templates/librecube-board (accessed on 27 December 2020).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Related Work | FANET-Specific | Routing Protocols | Mobility Models | Testbed | Open-Source |
|---|---|---|---|---|---|
| Miya et al. [25] | ✕ | ✓ | ✕ | ✓ | ✕ |
| Kaysina et al. [26] | ✓ | ✓ | ✕ | ✓ | ✕ |
| Hamdaoui et al. [29] | ✕ | ✓ | ✕ | ✓ | ✕ |
| Brown et al. [30] | ✓ | ✕ | ✕ | ✓ | ✕ |
| Kim et al. [27] | ✓ | ✕ | ✕ | ✓ | ✕ |
| Rosati et al. [31] | ✓ | ✓ | ✕ | ✓ | ✕ |
| Our approach | ✓ | ✓ | ✓ | ✓ | ✓ |
| Routing Protocol | Proactive | Reactive | Open-Source | Kernel Implementation |
|---|---|---|---|---|
| OLSR | ✓ | ✕ | ✓ | OLSRd |
| AODV | ✕ | ✓ | ✓ | AODV-UU |
| HWMP | ✓ | ✓ | ✓ | HWMP |
| BATMAN | ✓ | ✕ | ✓ | BATMAN-adv |
| Raspberry Pi Zero W | ESP32 | |
|---|---|---|
| CPU | ARM1176JZF-S (1 GHz, single-core) | Xtensa LX6 (240 MHz, dual-core) |
| Memory | RAM 512 MB (LPDDR2) | 520 KB (SRAM) 4 MB (flash) |
| Raspberry Pi Zero W | ESP32 | ||
|---|---|---|---|
| Serial Tx | Serial Rx | Serial Tx | Serial Rx |
| Packet to be transmitted | Received packet | Received packet | Packet to be transmitted |
| Gyroscope/accelerometer (processed data) | Gyroscope/accelerometer (processed data) | ||
| RSSI | RSSI | ||
| GNSS data | GNSS data | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amponis, G.; Lagkas, T.; Sarigiannidis, P.; Vitsas, V.; Fouliras, P. Inter-UAV Routing Scheme Testbeds. Drones 2021, 5, 2. https://doi.org/10.3390/drones5010002
Amponis G, Lagkas T, Sarigiannidis P, Vitsas V, Fouliras P. Inter-UAV Routing Scheme Testbeds. Drones. 2021; 5(1):2. https://doi.org/10.3390/drones5010002
Chicago/Turabian StyleAmponis, Georgios, Thomas Lagkas, Panagiotis Sarigiannidis, Vasileios Vitsas, and Panagiotis Fouliras. 2021. "Inter-UAV Routing Scheme Testbeds" Drones 5, no. 1: 2. https://doi.org/10.3390/drones5010002
APA StyleAmponis, G., Lagkas, T., Sarigiannidis, P., Vitsas, V., & Fouliras, P. (2021). Inter-UAV Routing Scheme Testbeds. Drones, 5(1), 2. https://doi.org/10.3390/drones5010002