TomoSim: A Tomographic Simulator for Differential Optical Absorption Spectroscopy




Abstract
1. Introduction
1.1. Background and Motivation
- A custom-equipped drone should be able to measure trace gas column density in a carefully programmed sequence;
- One can then organise these measurements into an array.
1.2. Differential Optical Absorption Spectroscopy (DOAS)
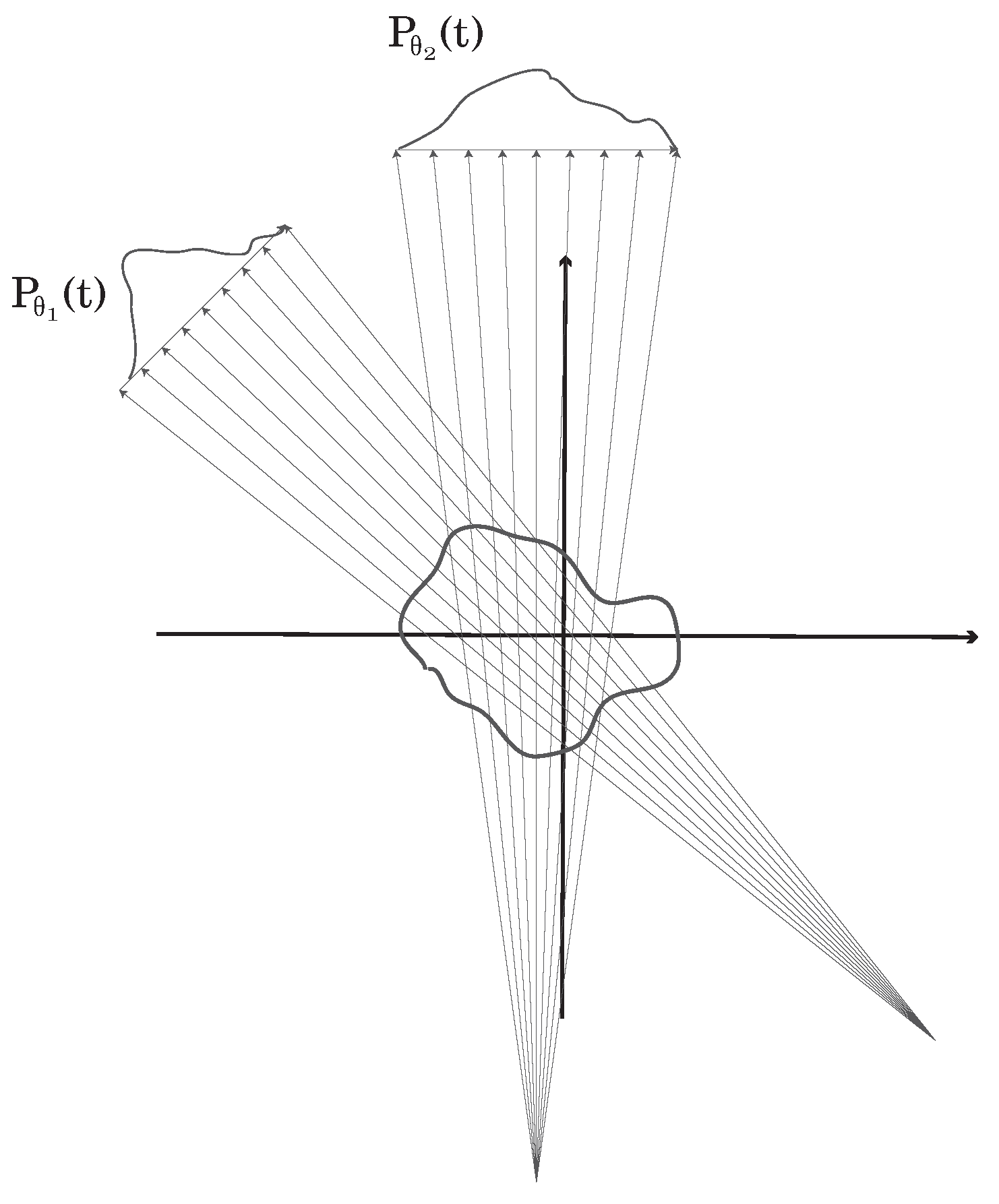
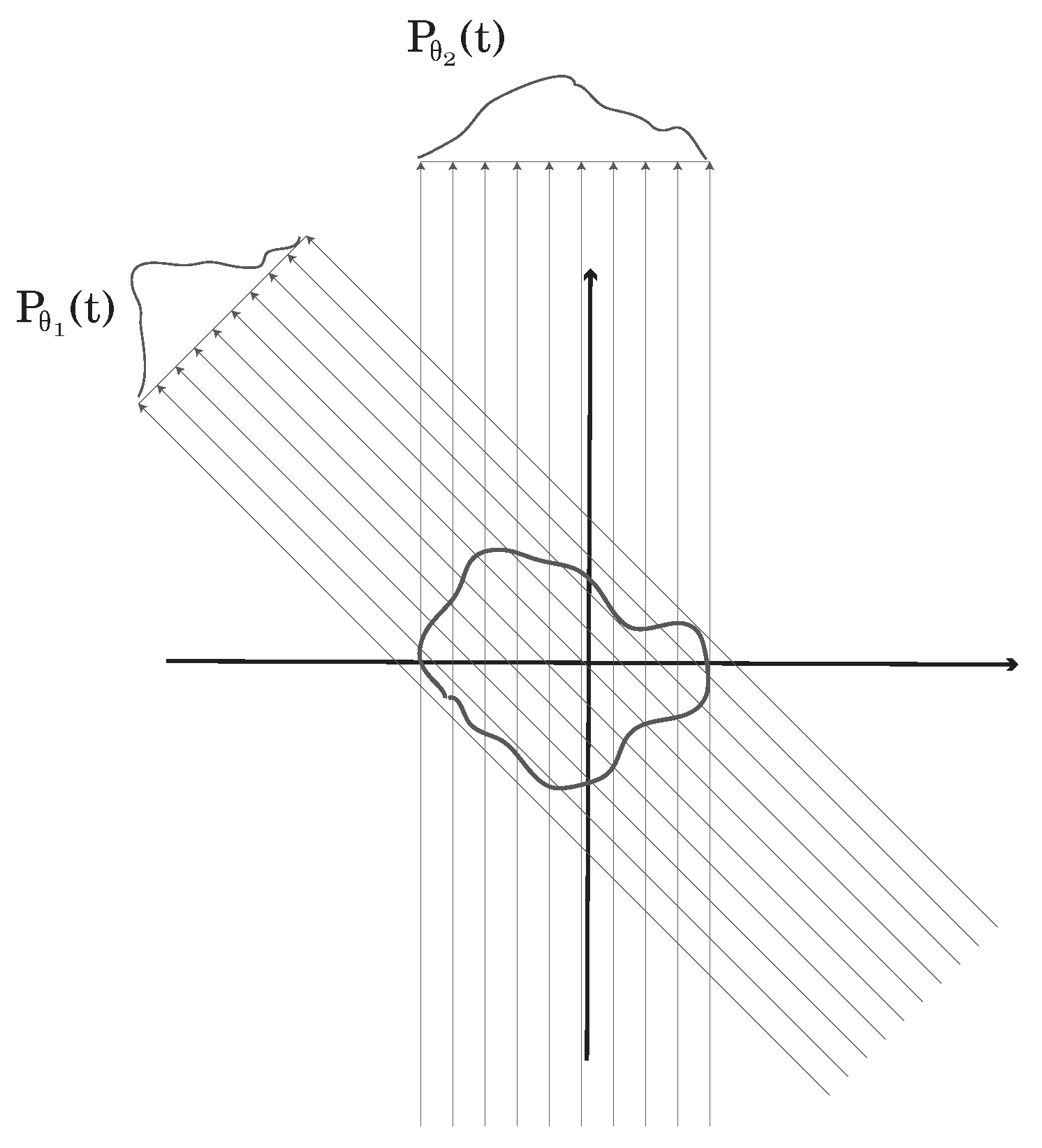
1.3. The Tomography Problem
1.3.1. Introduction
1.3.2. Discretisation
| Algorithm 1: Siddon’s algorithm’s procedural steps. After running this algorithm, one is able to represent any continuous ray through the analysis field as a sum of discrete lengths |
| Result: Discretised Region of Interest(ROI). calculate range of parametric values; calculate range of pixel indices; calculate parametric sets; merge sets; calculate pixel(or voxel) lengths; calculate pixel indices; |
1.3.3. Geometry
1.3.4. Reconstruction
1.4. DOAS Tomography
2. Materials and Methods
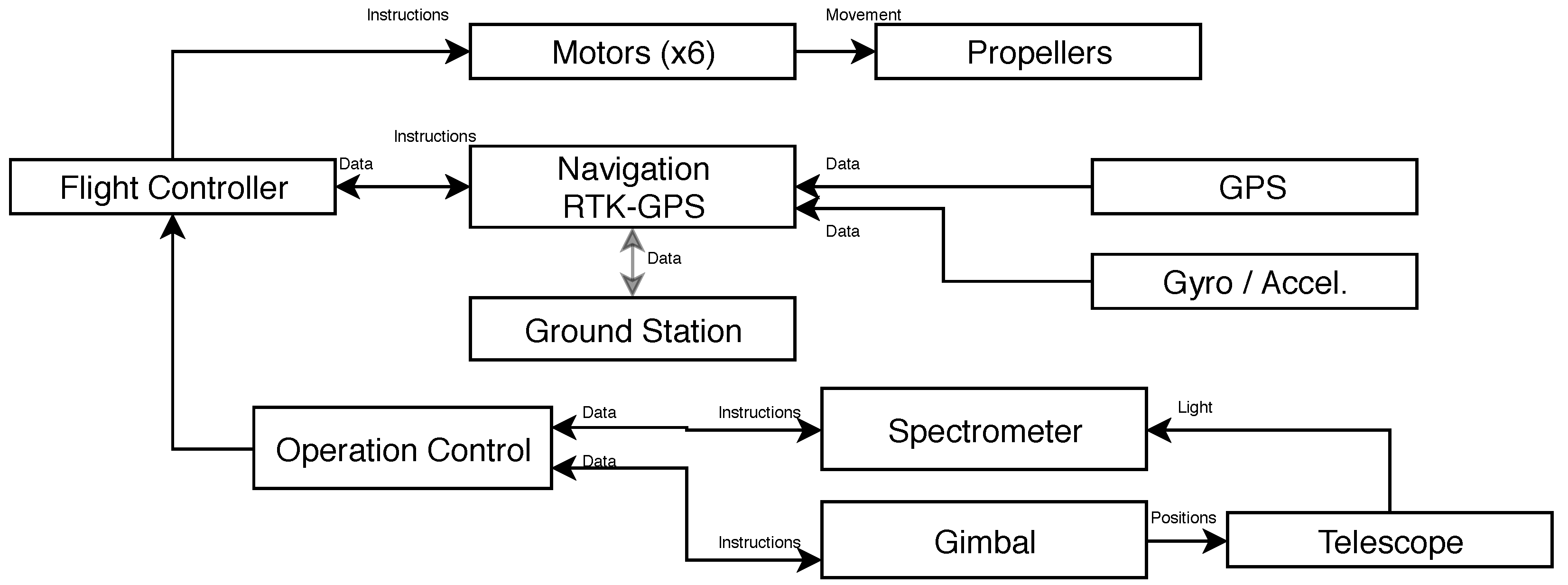
2.1. Device Description
2.2. Data Acquisition
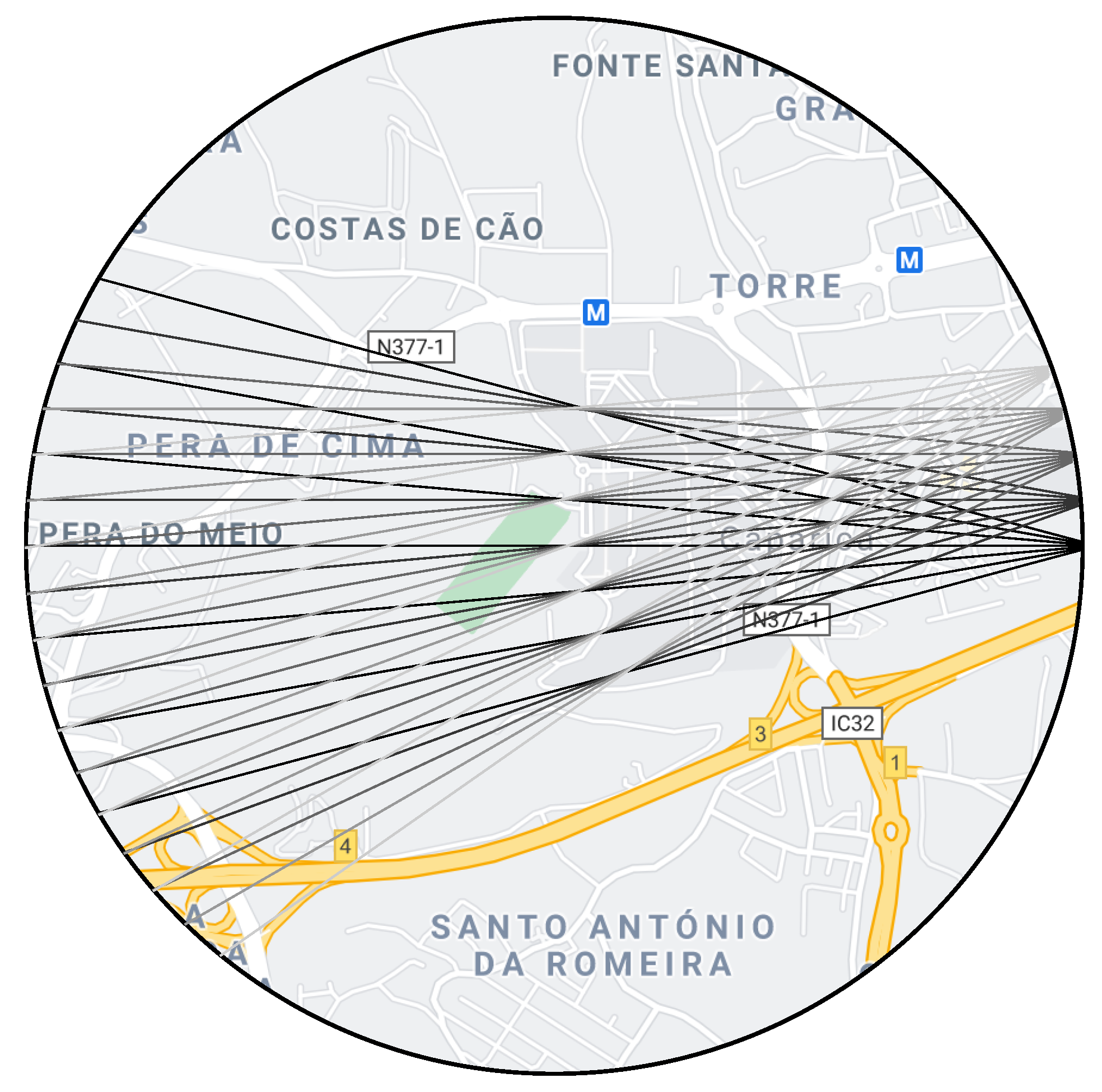
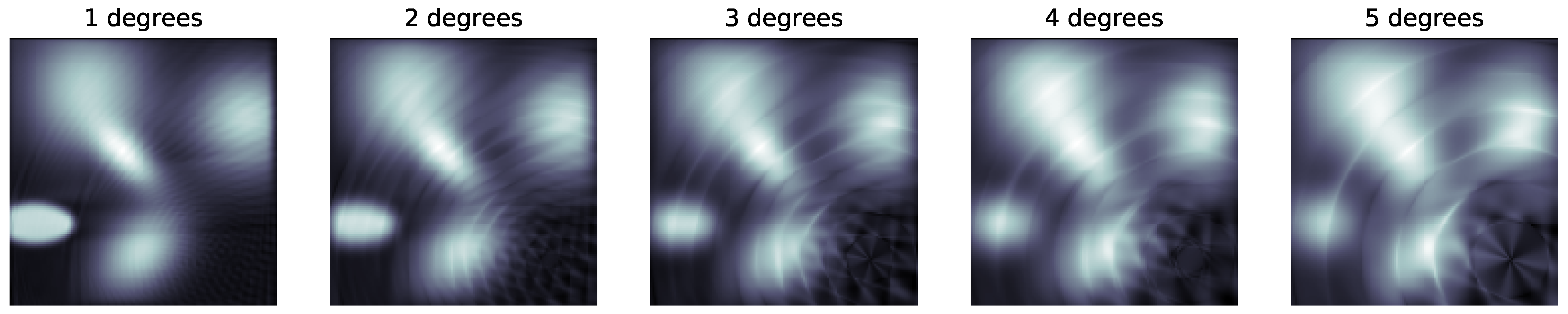
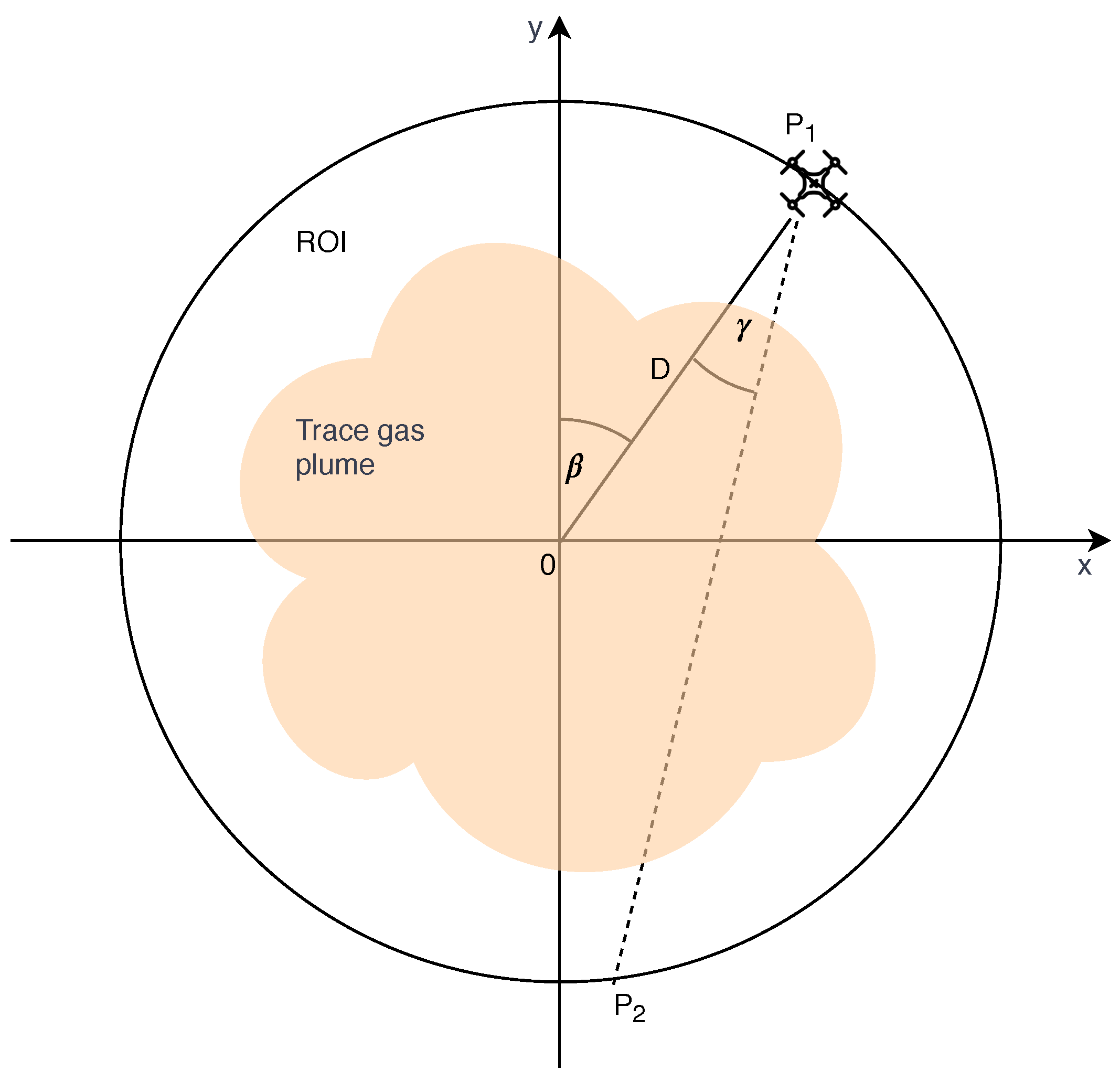
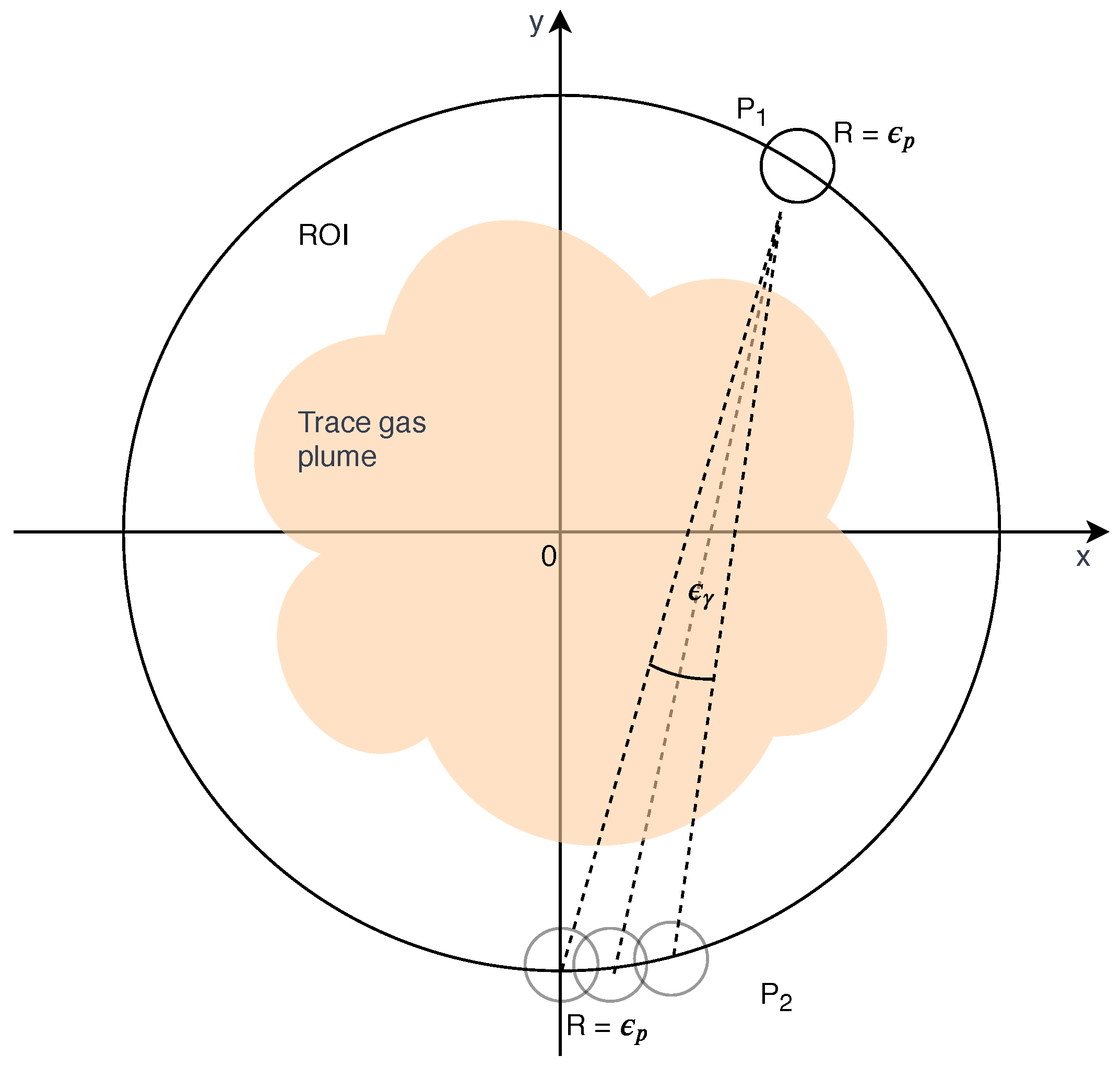
- First moment While flying in this circle, the device stops in a series of positions at a given fixed angular interval () from each other. The number of stops is defined by and by fan beam information requirements (see Reference [9]) At each one of these stops, the gimbal turns towards the trajectory’s interior and points in a series of angular directions that describe an arc. For procedural simplicity, the angle between these directions is also . At each one of these angles, the device’s operational controller instructs the spectrometer to acquire a given number of spectra, which depends on configuration and conditions. Besides spectral data, the system algebraically calculates and stores the point in which the light will exit the ROI (see Appendix A).
- Second moment The device positions itself in each of the points in which light has exited the ROI in the first moment and the gimbal is pointed towards the entrance point, effectively aiming in the opposite direction to which a spectral measurement took place in the 1st moment. Light that comes from the sun is scattered somewhere in the atmosphere and enters the ROI (at a given angle) in point A. It then traverses the distance AB and leaves the ROI in point B. At these distances and with this kind of geometry, light scattering can be considered negligible [22,29,30] and therefore light extinction will primarily be due to absorption by components between A and B [5]. It should then be possible to apply Lambert-Beer’s law to extract trace gases concentrations in the ROI, by considering light at point A as the source intensity ( in Equation (1)) and light at B the final intensity (I in Equation (1)). When the 2nd moment is complete, the system has a set of fan beam distributed spectra, which can be equated to projections in a tomography problem.
2.3. Phantoms
2.4. Reconstruction
2.5. Error Estimation
3. Results
3.1. Projection Calculations
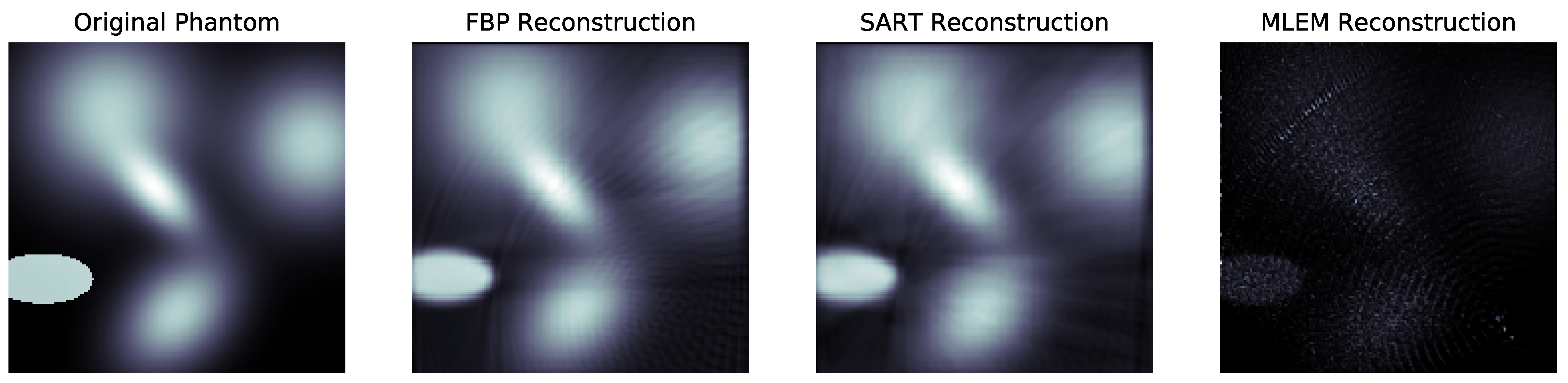
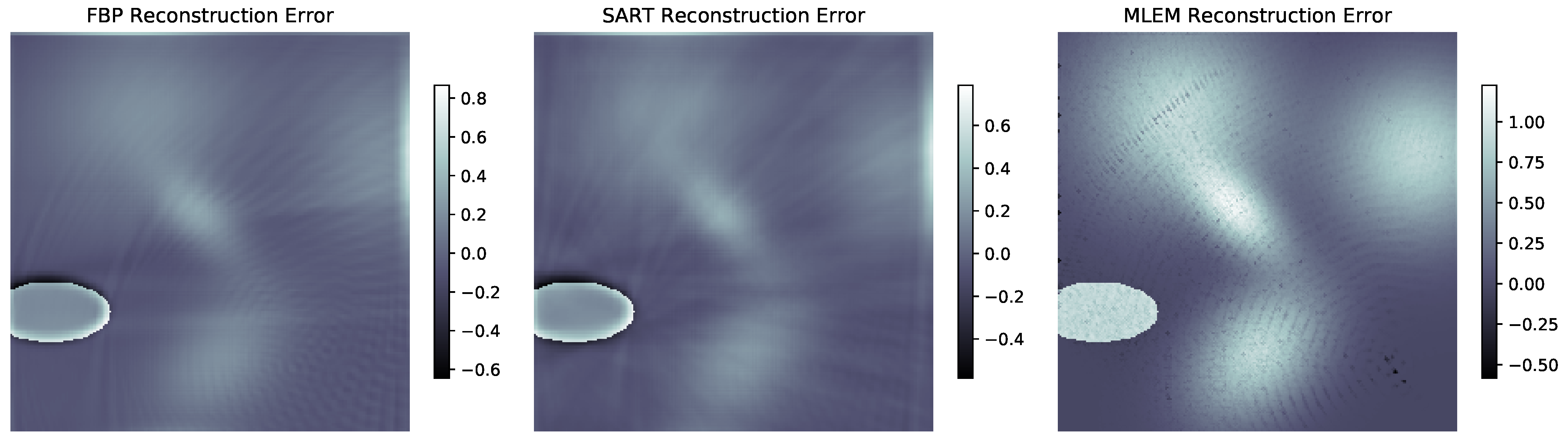
3.2. Reconstruction Results
4. Discussion
5. Conclusions
- Other phantoms: Presently, TomoSim only includes tomographic reconstruction for two different phantoms. While this is sufficient for simulation, it would be desirable to have some more phantoms, which could mimic other concentration distributions of interest.
- Paradigm shift: This simulation software was developed under the passive DOAS analysis model. Active measurements are much more versatile and accurate, and it would be interesting to develop this same technique using an artificial light source. Of course this would require many adaptations, namely regarding equipment and trajectory (probably even algorithms and interpolations).
- Threedimensional reconstruction: TomoSim was developed to produce the reconstruction of a two dimensional image corresponding to the spatial distribution of an array of target trace gases. It would be much more interesting to have a three dimensional equivalent. As far as simulation goes, this is one of the most immediate developments for this project. On a more tangible level, the additional dimensional would make the problem much more complex, mainly because of trajectory and battery logistics.
Author Contributions
Funding
Conflicts of Interest
Appendix A. Geometric Calculations
Appendix A.1. Light ROI Exit Point (P2) Determination

Appendix A.2. Geometric Error Determination

Appendix B. Simulation Data Characterization

References
- Perez, F.; Granger, B.E. IPython: A System for Interactive Scientific Computing. Comput. Sci. Eng. 2007, 9, 21–29. [Google Scholar] [CrossRef]
- Oliphant, T.E. Python for Scientific Computing. Comput. Sci. Eng. 2007, 9, 10–20. [Google Scholar] [CrossRef]
- APS. August 15, 1758: Death of Pierre Bouguer. Am. Phys. Soc. News 2011, 20, 2. [Google Scholar]
- Struve, W.S. Fundamentals of Molecular Spectroscopy; Wiler-Interscience: Hoboken, NJ, USA, 1989. [Google Scholar]
- Platt, U.; Stutz, J. Differential Optical Absorption Spectroscopy—Principles and Applications; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Merlaud, A. Development and Use of Compact Instruments for Tropospheric Investigations Based on Optical Spectroscopy from Mobile Platforms. Ph.D. Thesis, Faculté des Sciences—Université Catholique de Louvain, Louvain, Belgium, 2013. [Google Scholar]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes: The Art of Scientific Computing, 3rd ed.; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Gunderman, R. Essential Radiology: Clinical Presentation, Pathophysiology, Imaging, 2nd ed.; Thieme: New York, NY, USA, 2006. [Google Scholar]
- Kak, A.; Slaney, M. Principles of Computerized Tomographic Imaging; Society of Industrial and Applied Mathematics: Philadelphia, PA, USA, 2001. [Google Scholar]
- Bruyant, P.P. Analytic and iterative reconstruction algorithms in SPECT. J. Nucl. Med. Off. Publ. Soc. Nucl. Med. 2002, 43, 1343–1358. [Google Scholar]
- Herman, G.T. Image Reconstruction From Projections. Real-Time Imaging 1995, 1, 3–18. [Google Scholar] [CrossRef]
- Siddon, R.L. Fast calculation of the exact radiological path for a three-dimensional CT array. Med. Phys. 1985, 12, 252–255. [Google Scholar] [CrossRef] [PubMed]
- Gao, H. Fast parallel algorithms for the x-ray transform and its adjoint. Med. Phys. 2012, 39, 7110–7120. [Google Scholar] [CrossRef]
- Herman, G.T. Fundamentals of Computerized Tomography; Advances in Pattern Recognition; Springer: London, UK, 2009. [Google Scholar] [CrossRef]
- Defrise, M.; Kinahan, P.E.; Michel, C.J. Positron Emission Tomography; Springer: London, UK, 2005; pp. 63–91. [Google Scholar]
- Andersen, A. Simultaneous Algebraic Reconstruction Technique (SART): A superior implementation of the ART algorithm. Ultrason. Imaging 1984, 6, 81–94. [Google Scholar] [CrossRef]
- Shepp, L.A.; Vardi, Y. Maximum Likelihood Reconstruction for Emission Tomography. IEEE Trans. Med Imaging 1982, 1, 113–122. [Google Scholar] [CrossRef] [PubMed]
- Byer, R.L.; Shepp, L.A. Two-dimensional remote air-pollution monitoring via tomography. Opt. Lett. 1979, 4, 75. [Google Scholar] [CrossRef] [PubMed]
- Laepple, T.; Knab, V.; Mettendorf, K.U.; Pundt, I. Longpath DOAS tomography on a motorway exhaust gas plume: Numerical studies and application to data from the BAB II campaign. Atmos. Chem. Phys. Discuss. 2004, 4, 2435–2484. [Google Scholar] [CrossRef]
- Pundt, I.; Mettendorf, K.U.; Laepple, T.; Knab, V.; Xie, P.; Lösch, J.; Friedeburg, C.V.; Platt, U.; Wagner, T. Measurements of trace gas distributions using Long-path DOAS-Tomography during the motorway campaign BAB II: Experimental setup and results for NO 2. Atmos. Environ. 2005, 39, 967–975. [Google Scholar] [CrossRef]
- Stutz, J.; Hurlock, S.C.; Colosimo, S.F.; Tsai, C.; Cheung, R.; Festa, J.; Pikelnaya, O.; Alvarez, S.; Flynn, J.H.; Erickson, M.H.; et al. A novel dual-LED based long-path DOAS instrument for the measurement of aromatic hydrocarbons. Atmos. Environ. 2016, 147, 121–132. [Google Scholar] [CrossRef]
- Frins, E.; Bobrowski, N.; Platt, U.; Wagner, T. Tomographic multiaxis-differential optical absorption spectroscopy observations of Sun-illuminated targets: A technique providing well-defined absorption paths in the boundary layer. Appl. Opt. 2006, 45, 6227–6240. [Google Scholar] [CrossRef] [PubMed]
- DJI. DJI E1200 Pro Tuned Propulsion System. 2015. Available online: https://www.dji.com/pt/e1200 (accessed on 28 December 2020).
- Celera. UAV Gimbal. Available online: https://www.celeramotion.com/applications/satcom-uav/uav-gimbal/ (accessed on 28 December 2020).
- Omegon. MightyMak 60 Specifications. Available online: https://www.omegon.eu/telescopes/omegon-maksutov-telescope-mightymak-60/p,46442#tab_bar_1_select (accessed on 28 December 2020).
- Avantes. AvaSpec-Mini: Small and Powerful OEM Spectrometer. Available online: https://www.avantes.com/products/spectrometers/compactline/avantes-spectrometer-mini-2048cl/ (accessed on 28 December 2020).
- Triantafyllou, D.; Aspragathos, N.A. Intelligent Robotics and Applications—Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2011; Volume 7101, pp. 509–519. [Google Scholar] [CrossRef]
- Zimmermann, F.; Eling, C.; Klingbeil, L.; Kuhlmann, H. Precise Positioning of Uavs—Dealing with Challenging Rtk-Gps Measurement Conditions during Automated Uav Flights. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 95–102. [Google Scholar] [CrossRef]
- Casaballe, N.; Osorio, M.; Di Martino, M.; Frins, E. Comparison Between Regularized Optimization Algorithms for Tomographic Reconstruction of Plume Cross Sections in the Atmosphere. Earth Space Sci. 2017, 4, 723–736. [Google Scholar] [CrossRef]
- Kern, C.; Deutschmann, T.; Vogel, L.; Wöhrbach, M.; Wagner, T.; Platt, U. Radiative transfer corrections for accurate spectroscopic measurements of volcanic gas emissions. Bull. Volcanol. 2010, 72, 233–247. [Google Scholar] [CrossRef]
- Stachniss, C.; Plagemann, C.; Lilienthal, A.J. Learning gas distribution models using sparse Gaussian process mixtures. Auton. Robot. 2009, 26, 187–202. [Google Scholar] [CrossRef]
- Kazantsev, D.; Pickalov, V.; Nagella, S.; Pasca, E.; Withers, P.J. TomoPhantom, a software package to generate 2D–4D analytical phantoms for CT image reconstruction algorithm benchmarks. SoftwareX 2018, 7, 150–155. [Google Scholar] [CrossRef]
- Stutz, J.; Platt, U. Numerical analysis and estimation of the statistical error of differential optical absorption spectroscopy measurements with least-squares methods. Appl. Opt. 1996, 35, 6041. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | C0 | X0 | Y0 | a | b | Angle |
|---|---|---|---|---|---|---|
| Gaussian | 1 | −0.1 | −0.1 | 0.25 | 0.5 | −45 |
| Gaussian | 1 | 0.6 | 0 | 0.65 | 0.45 | −45 |
| Gaussian | 1 | −0.6 | −0.4 | 0.8 | 0.8 | 0 |
| Gaussian | 1 | −0.4 | 0.8 | 0.7 | 0.7 | 0 |
| Ellipse | 1 | 0.4 | −0.8 | 0.3 | 0.15 | 0 |
| Algorithm | Projection Intervals | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| FBP | 0.2365 | 0.2408 | 0.2609 | 0.2948 | 0.3465 |
| SART | 0.2225 | 0.2278 | 0.2771 | 0.3537 | 0.3302 |
| MLEM | 0.8705 | 0.9723 | 0.9986 | 0.9744 | 0.9890 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valente de Almeida, R.; Matela, N.; Vieira, P. TomoSim: A Tomographic Simulator for Differential Optical Absorption Spectroscopy. Drones 2021, 5, 3. https://doi.org/10.3390/drones5010003
Valente de Almeida R, Matela N, Vieira P. TomoSim: A Tomographic Simulator for Differential Optical Absorption Spectroscopy. Drones. 2021; 5(1):3. https://doi.org/10.3390/drones5010003
Chicago/Turabian StyleValente de Almeida, Rui, Nuno Matela, and Pedro Vieira. 2021. "TomoSim: A Tomographic Simulator for Differential Optical Absorption Spectroscopy" Drones 5, no. 1: 3. https://doi.org/10.3390/drones5010003
APA StyleValente de Almeida, R., Matela, N., & Vieira, P. (2021). TomoSim: A Tomographic Simulator for Differential Optical Absorption Spectroscopy. Drones, 5(1), 3. https://doi.org/10.3390/drones5010003