Towards Improved Hybrid Actuation Mechanisms for Flapping Wing Micro Air Vehicles: Analytical and Experimental Investigations †



Abstract
:1. Introduction
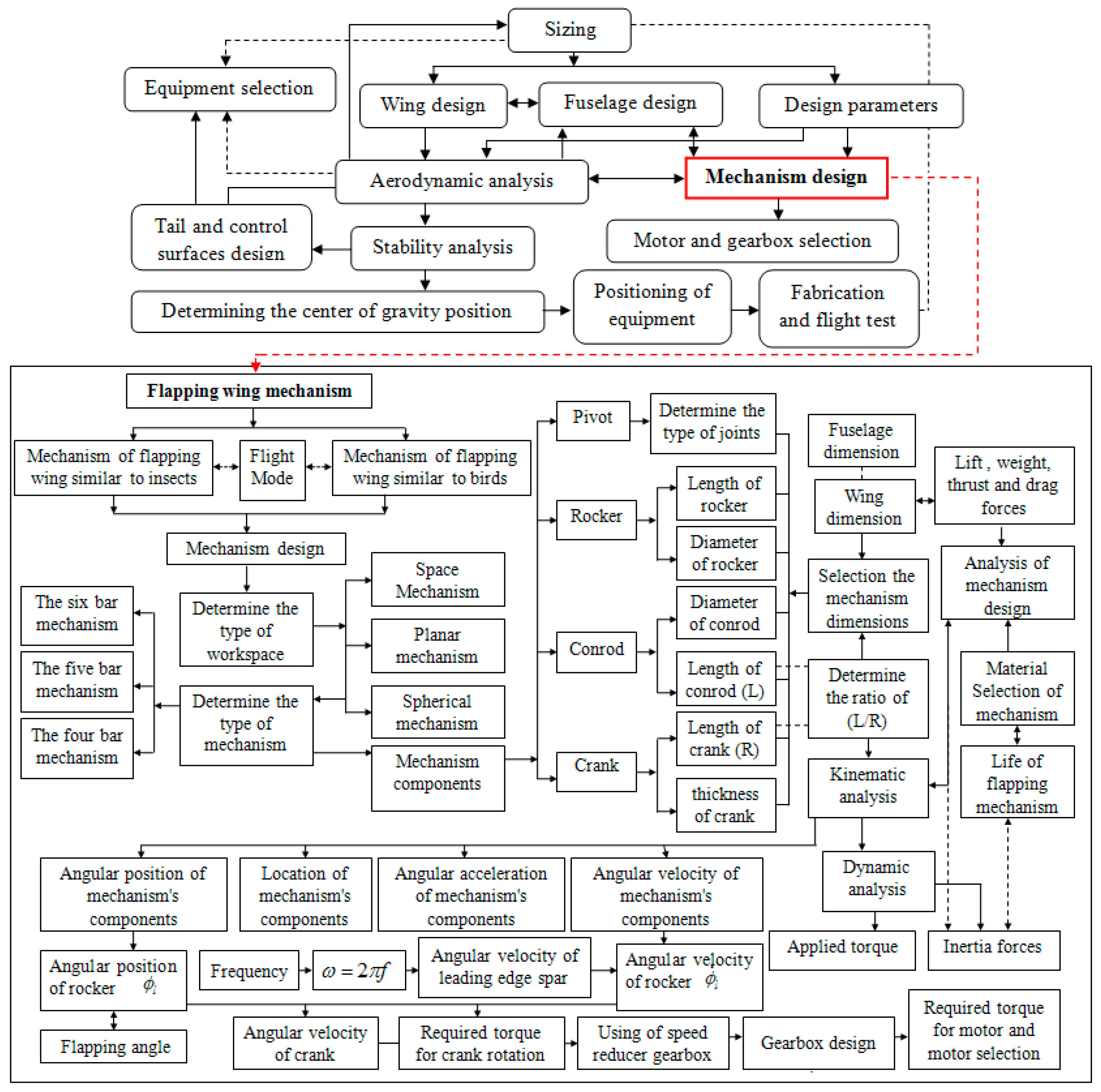
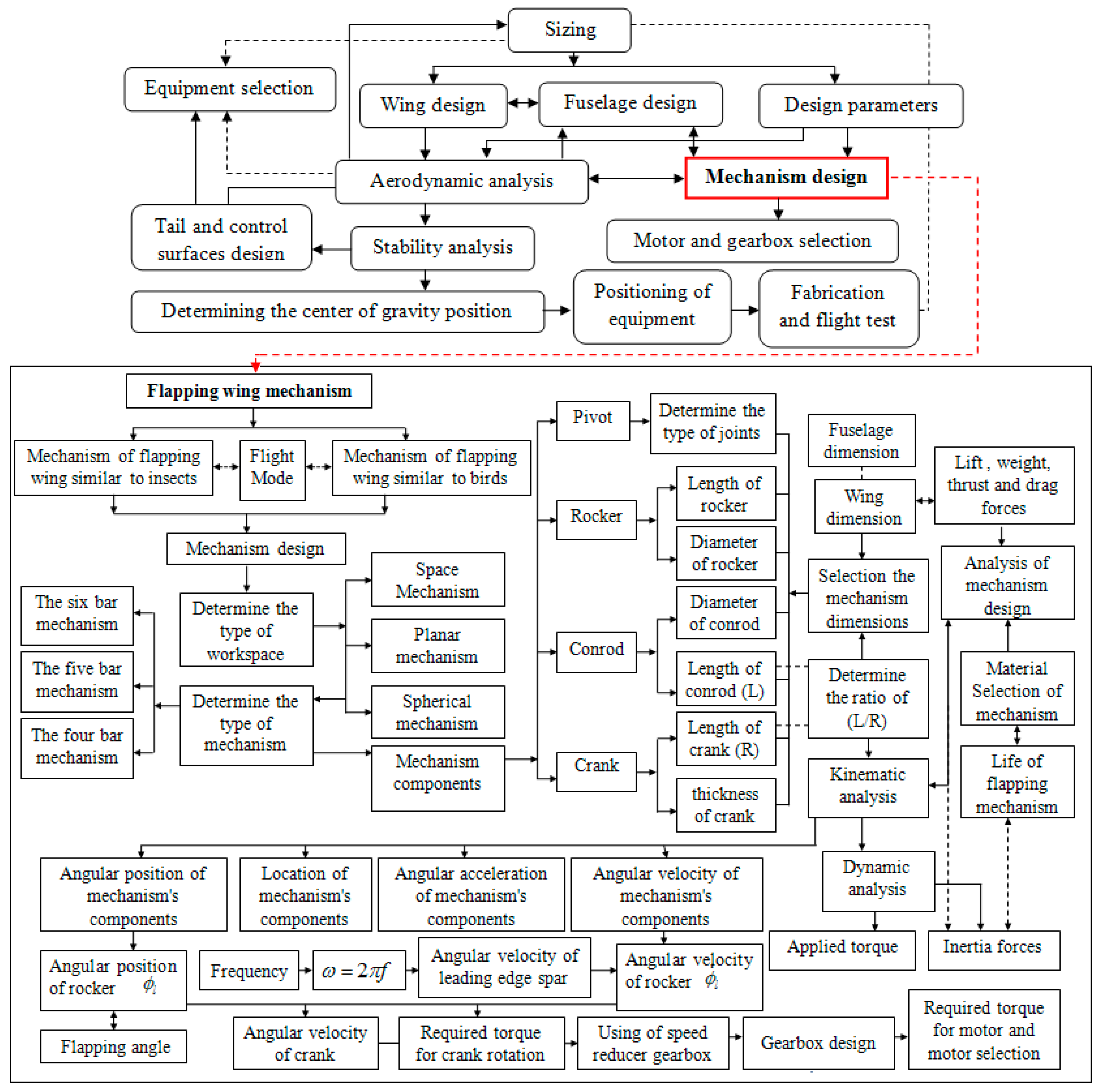
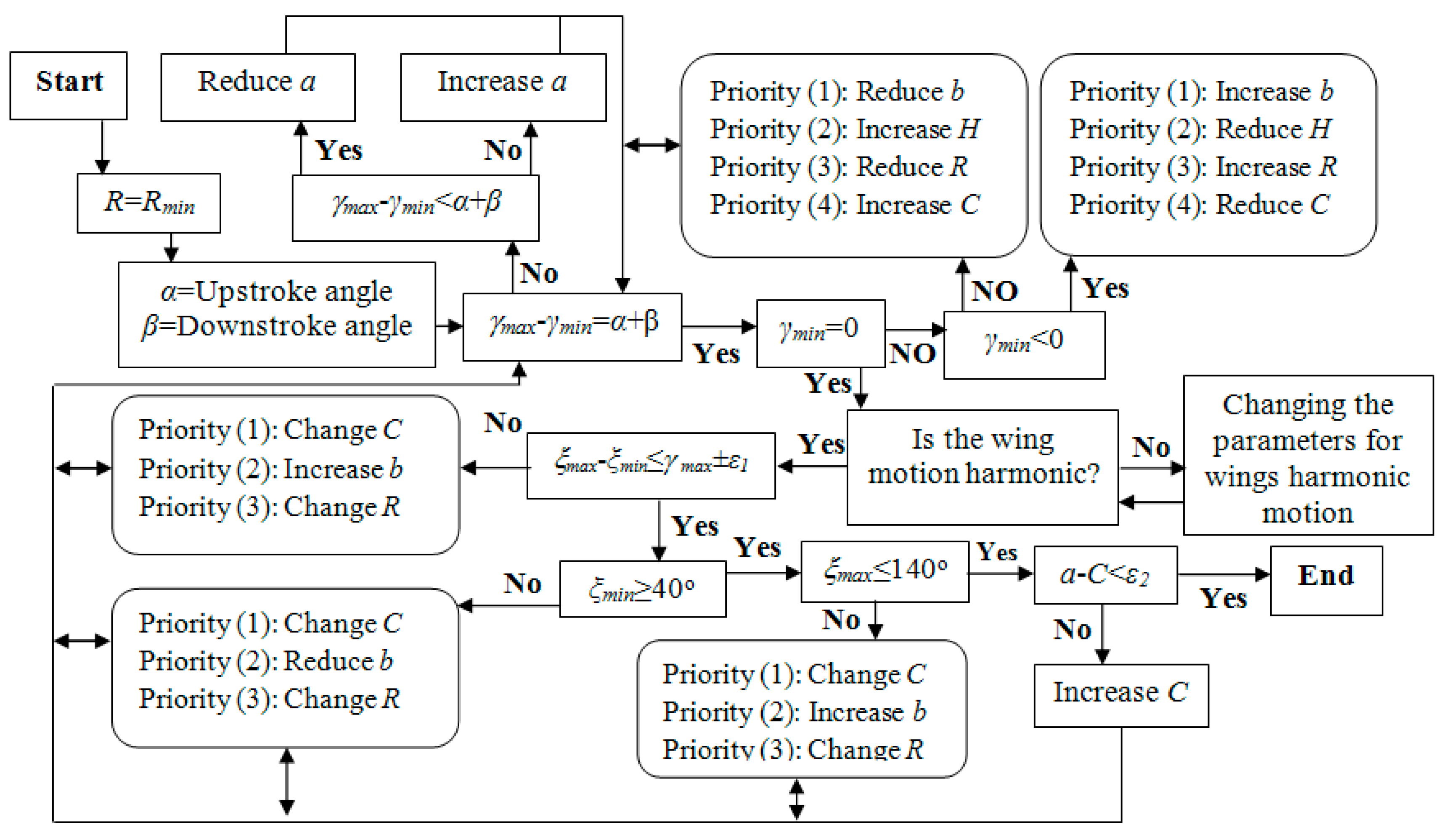
2. Flapping Wing Mechanism Design Process
3. Thunder I FWMAV Hybrid Mechanism Design
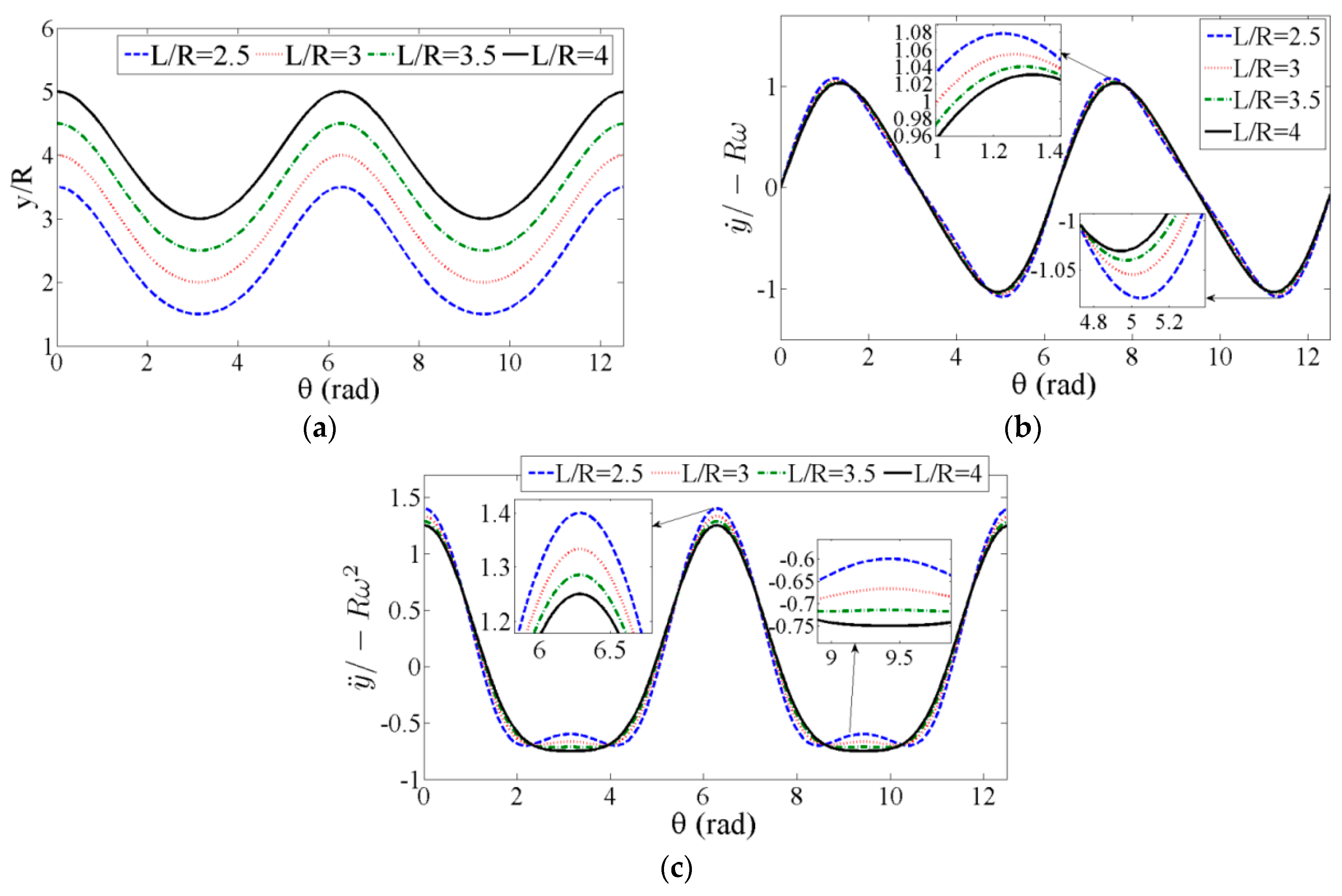
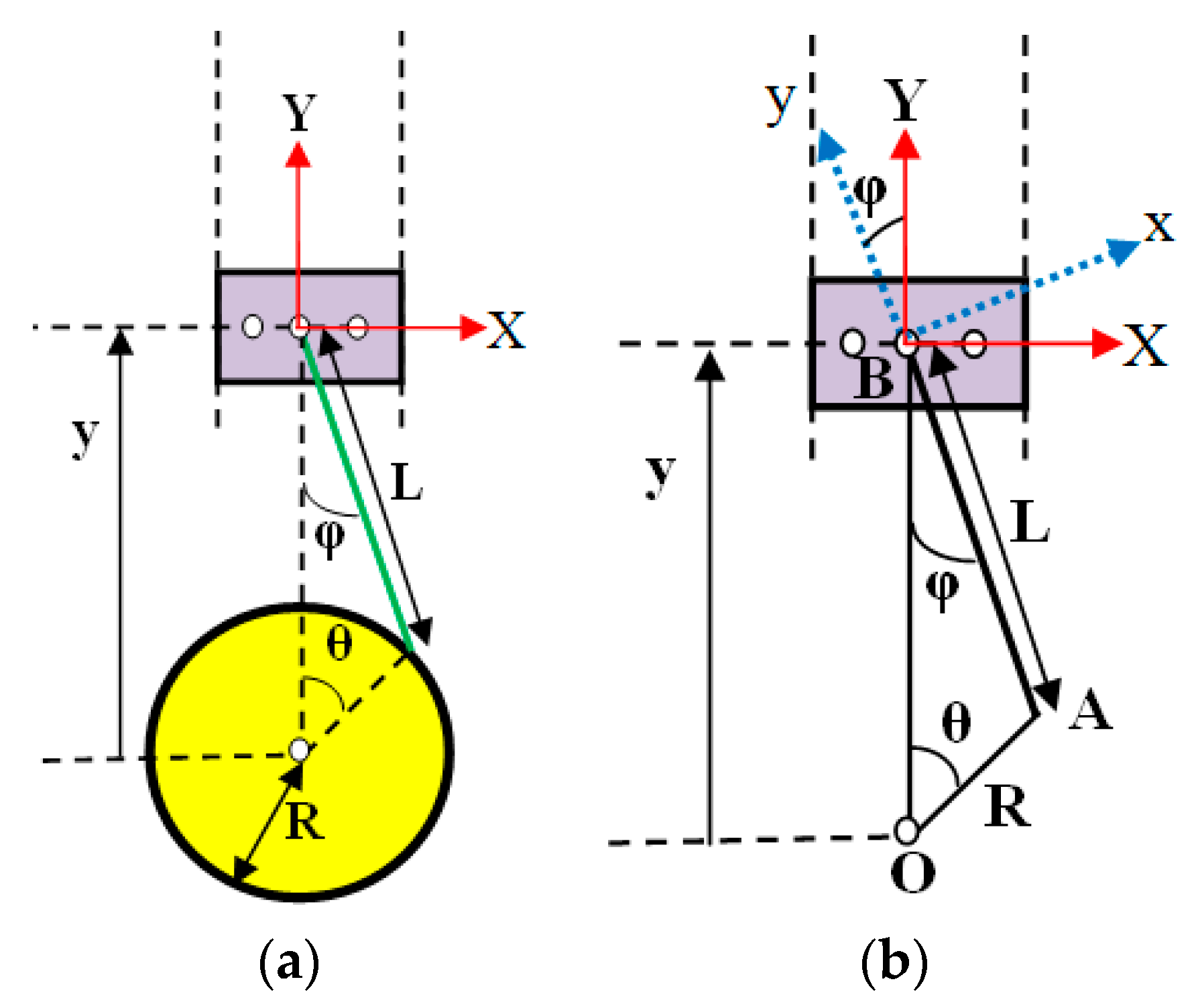
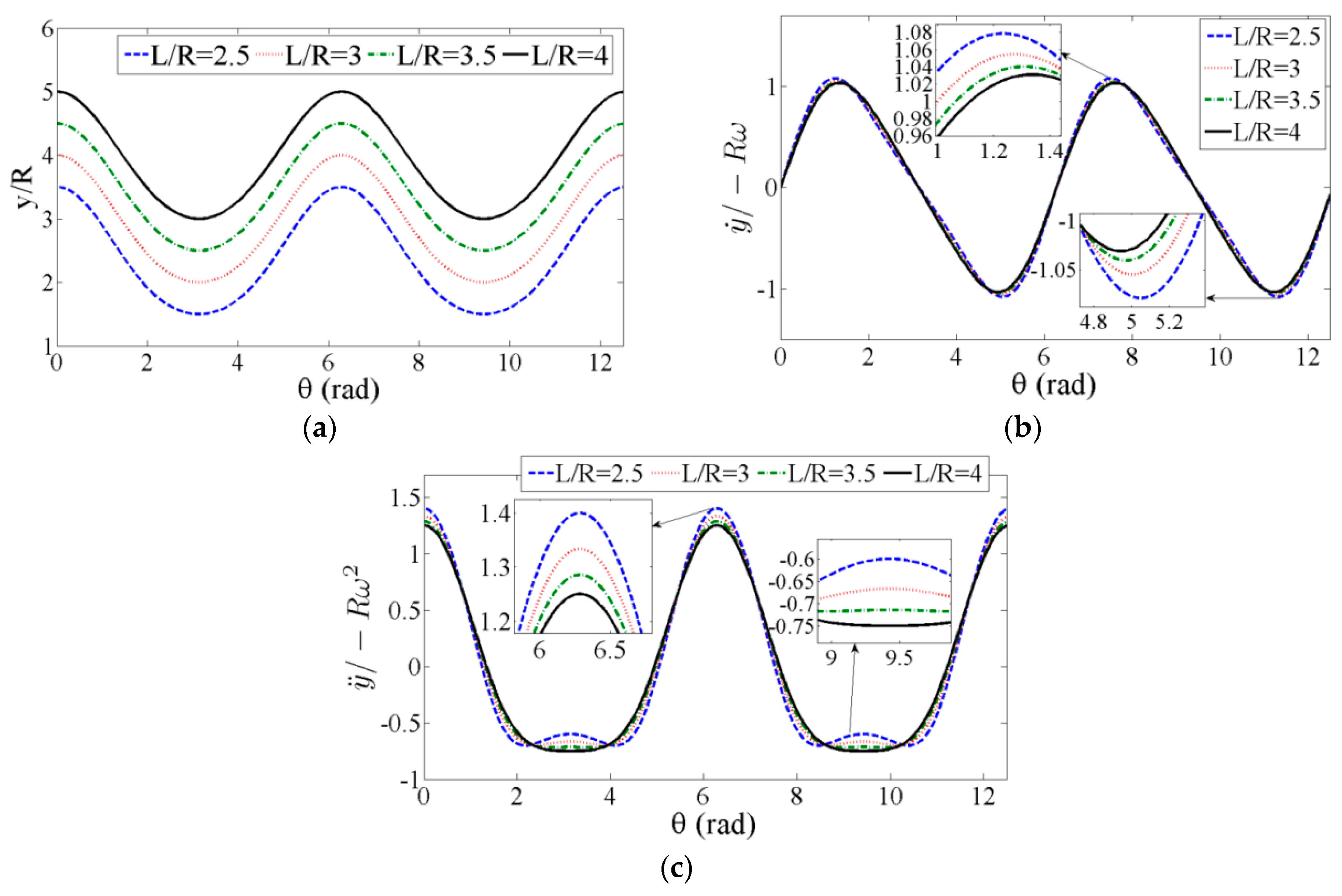
3.1. Determining the Minimum Ratio of L/R
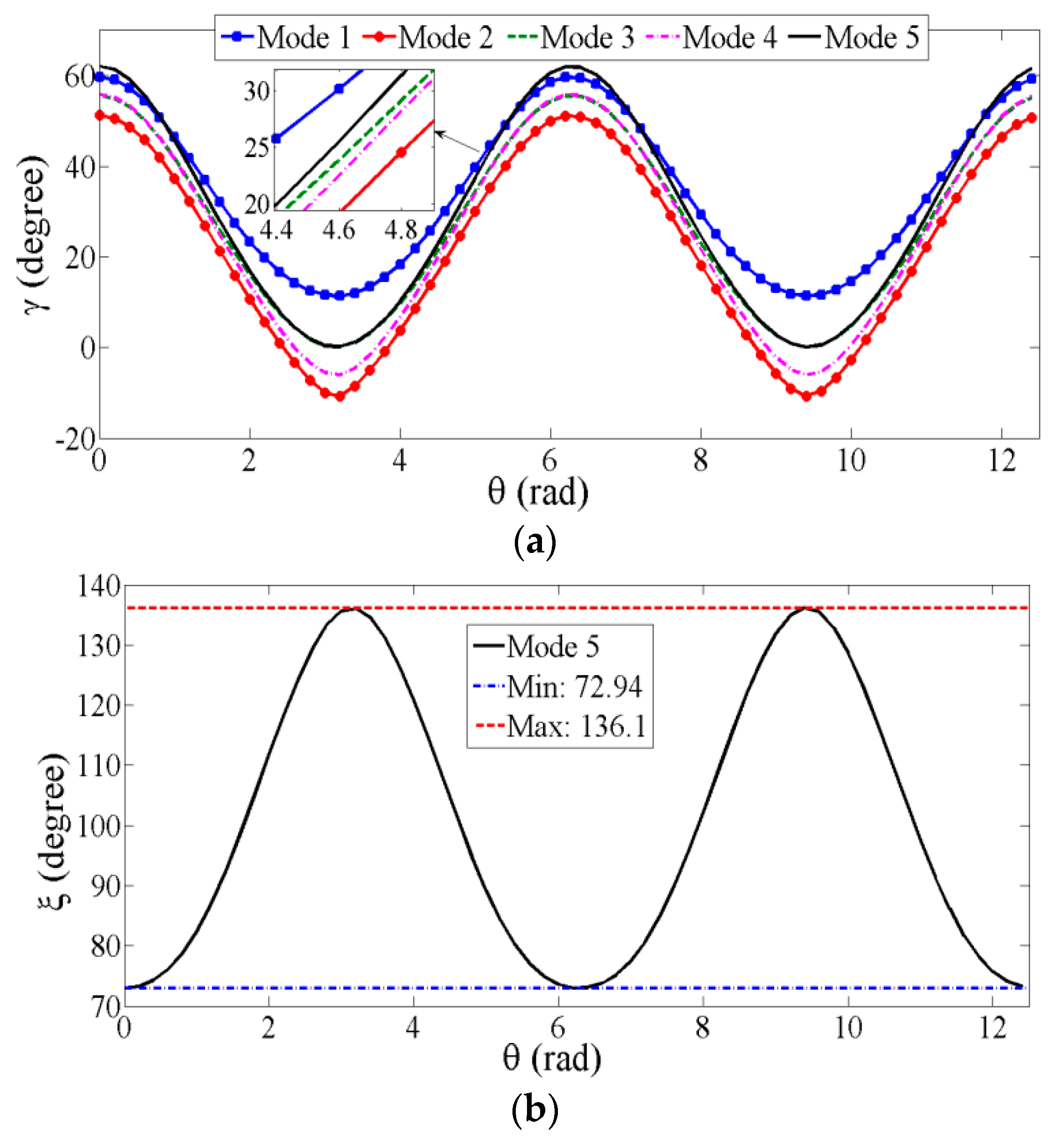
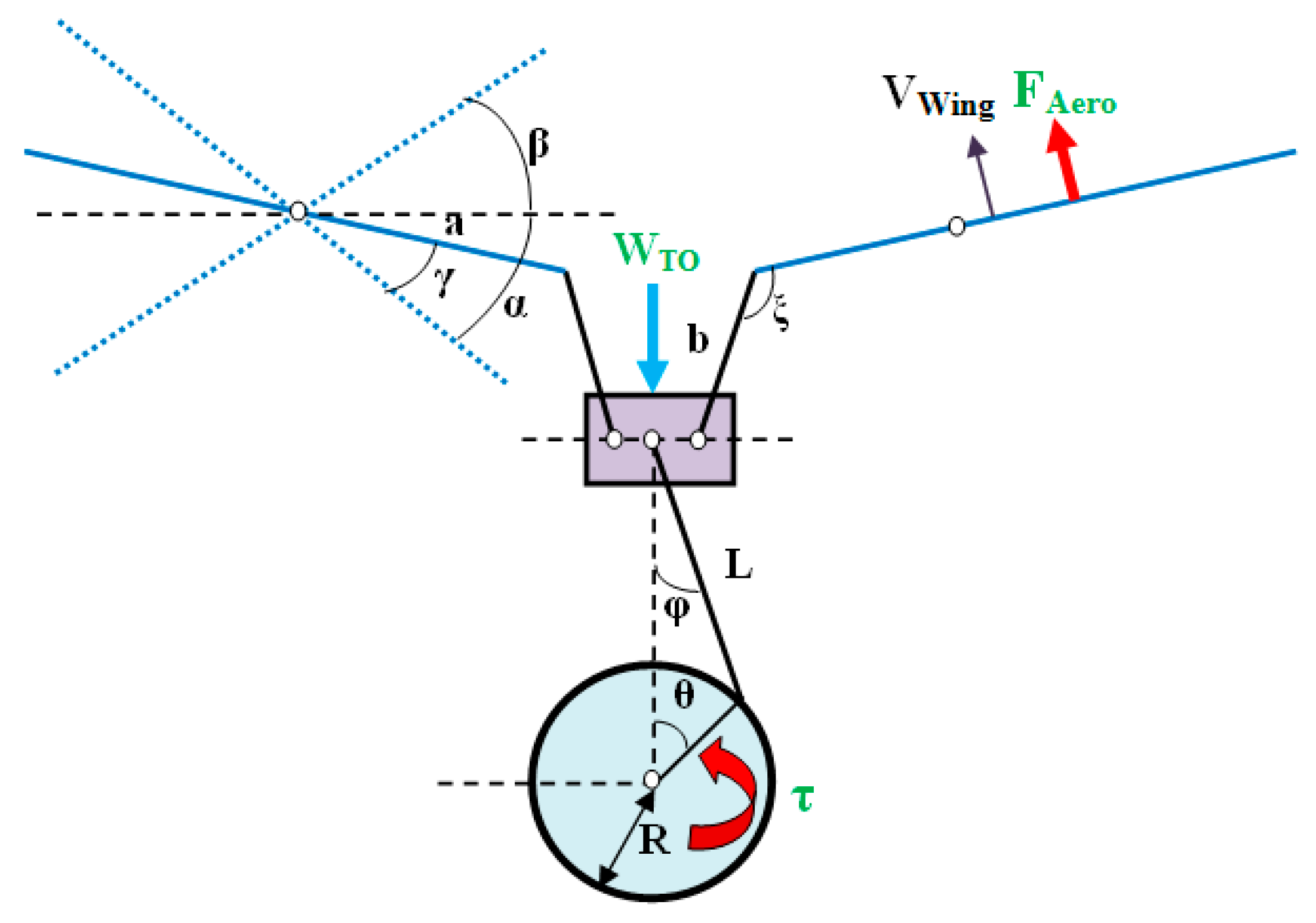
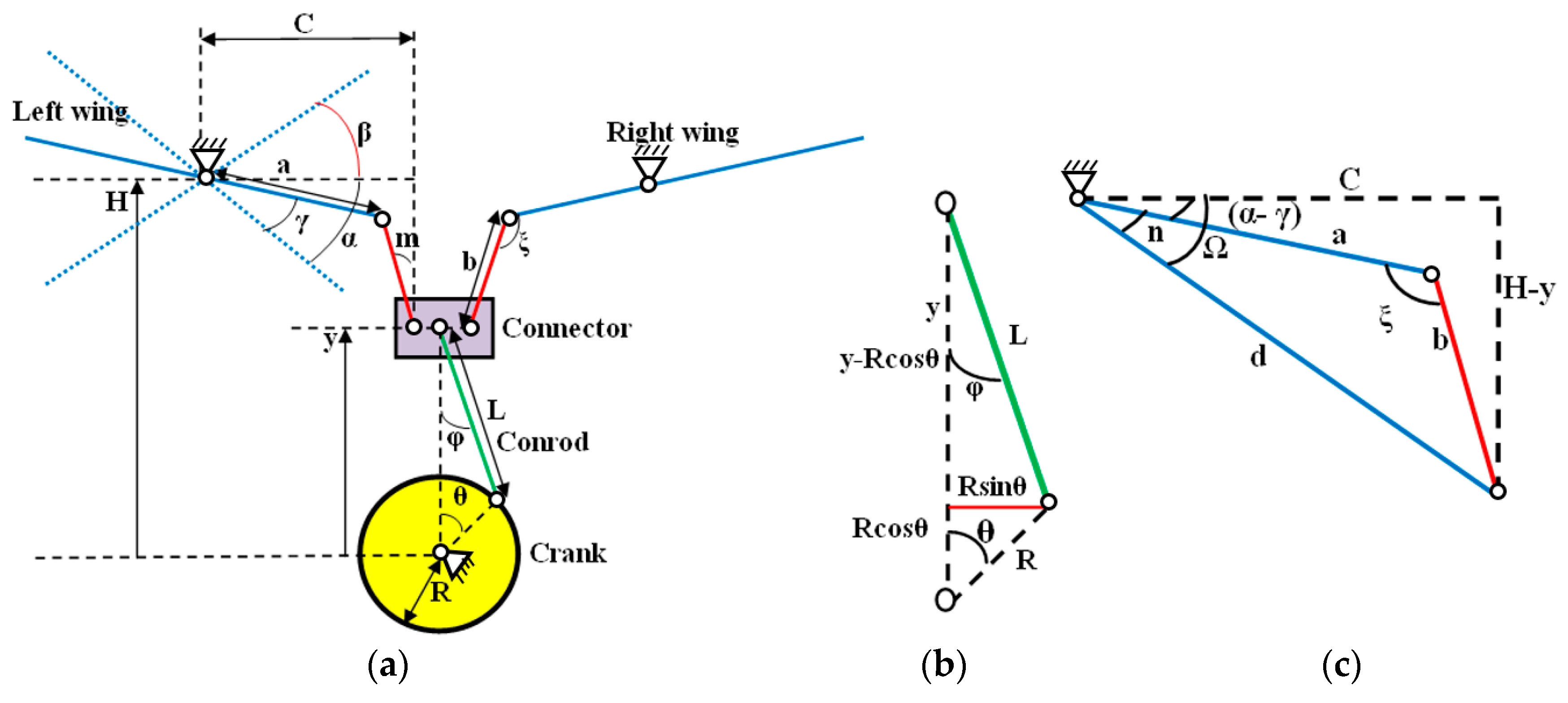
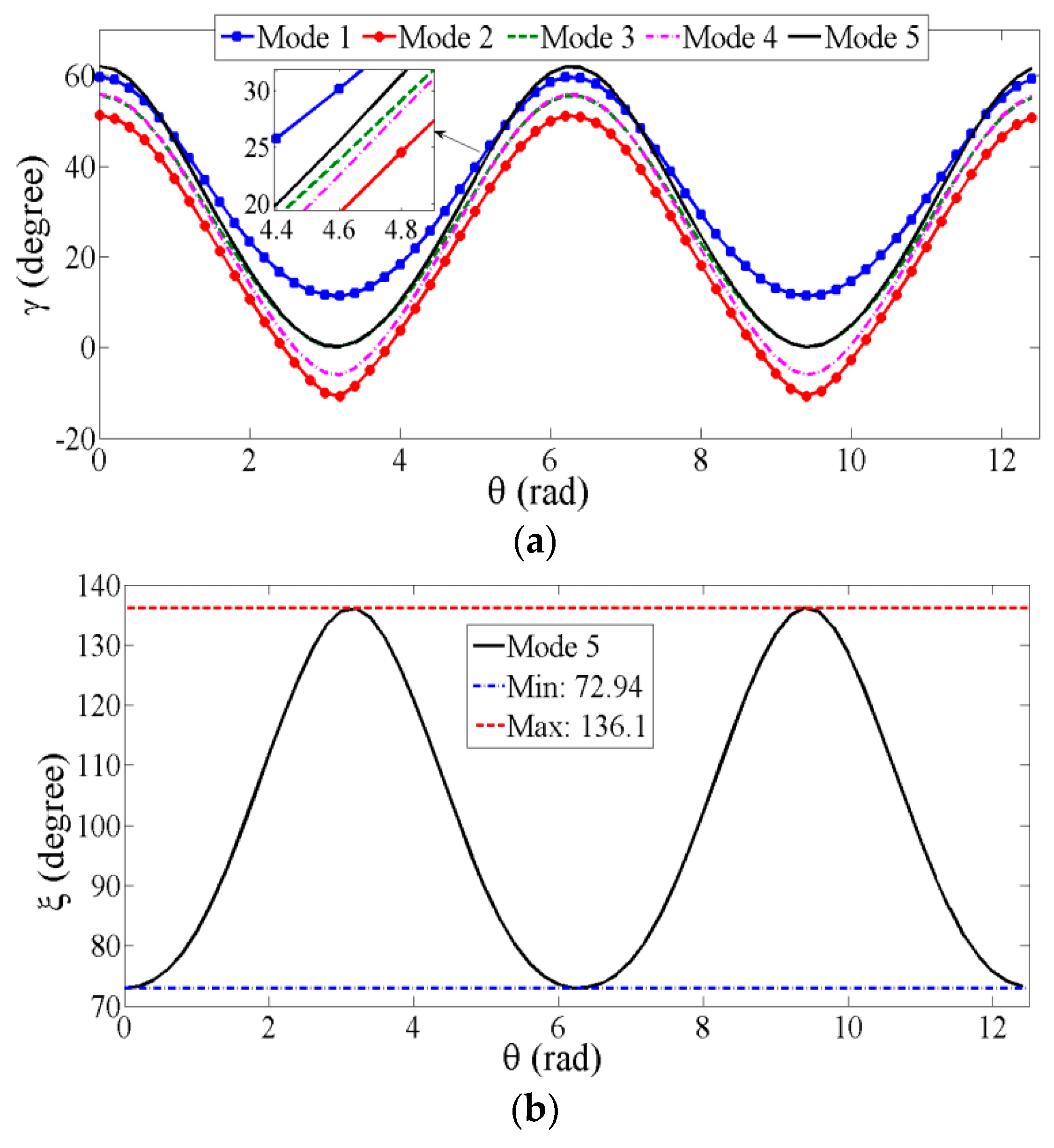
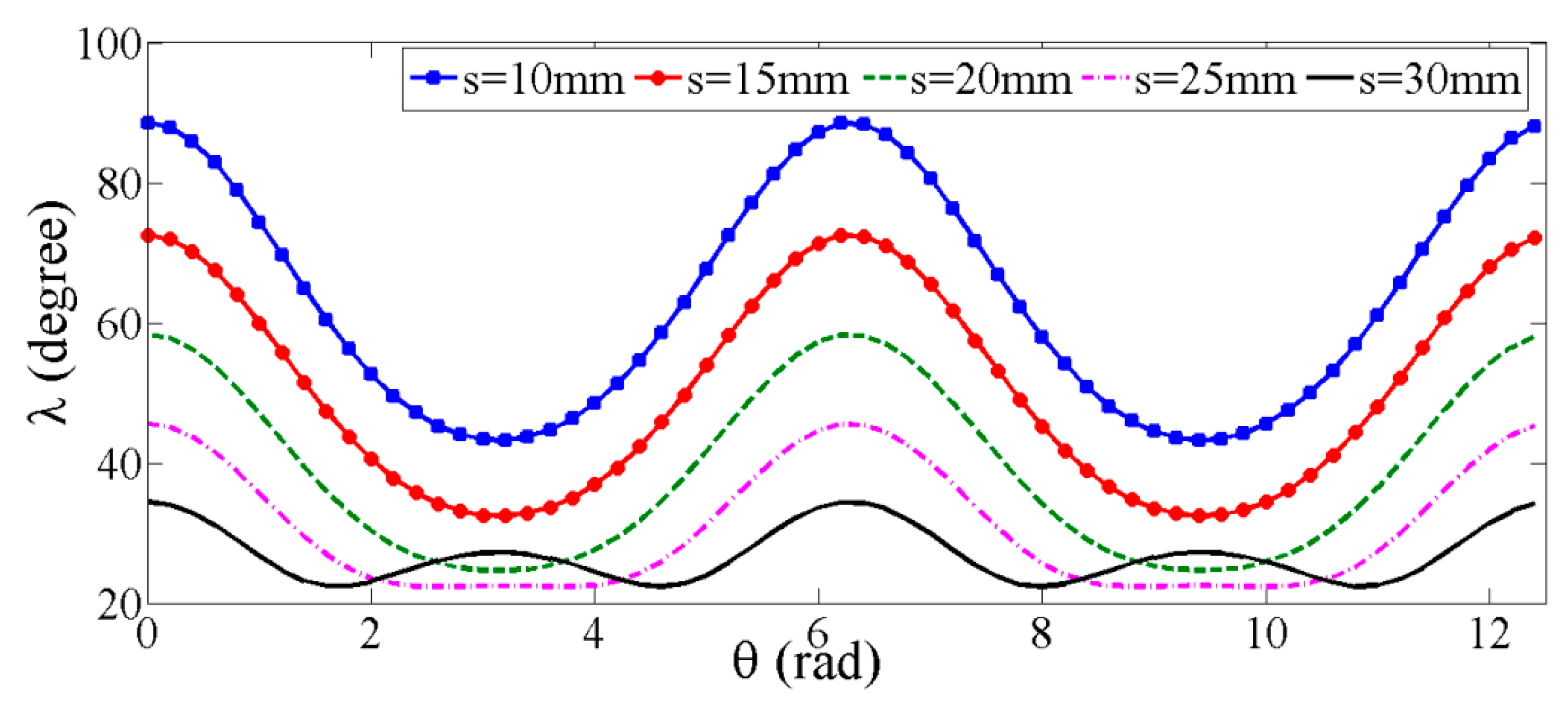
3.2. Determining of the Flapping Angle and the Optimal Angle of Transmission
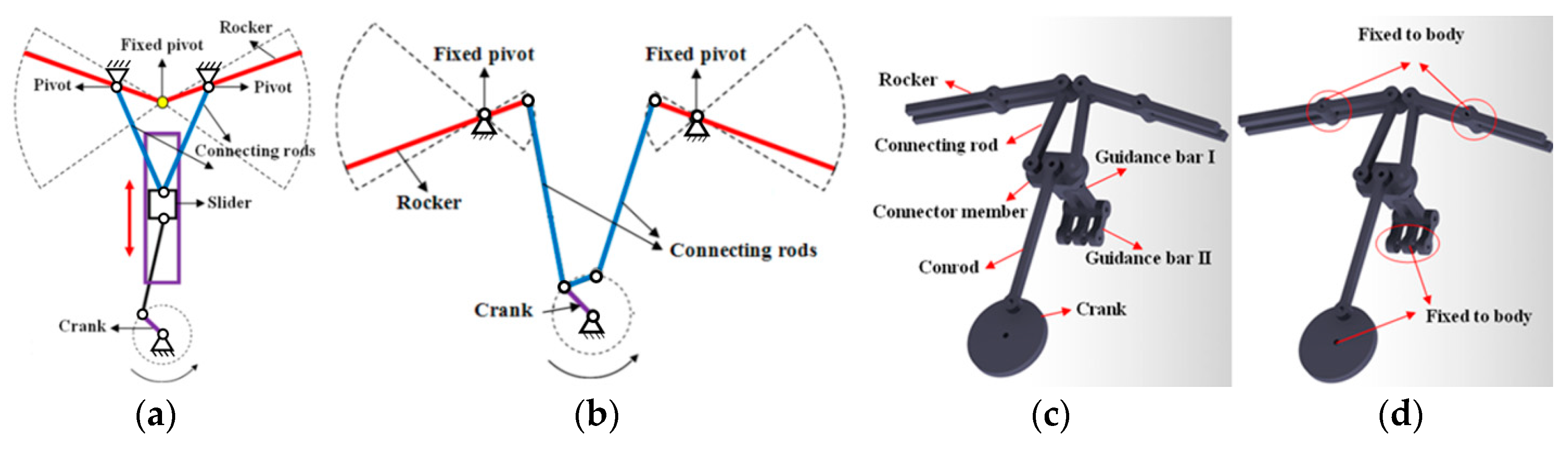
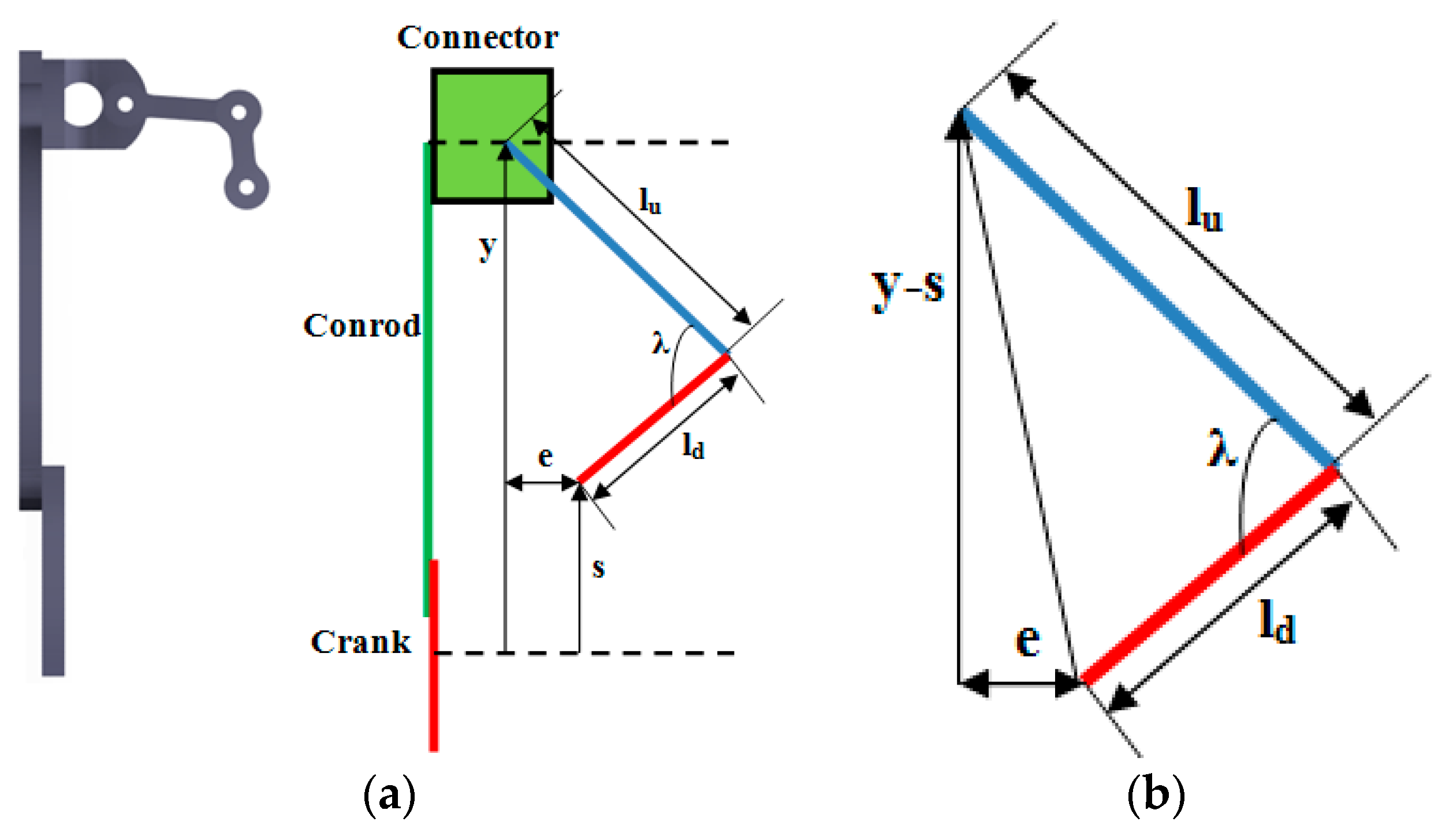
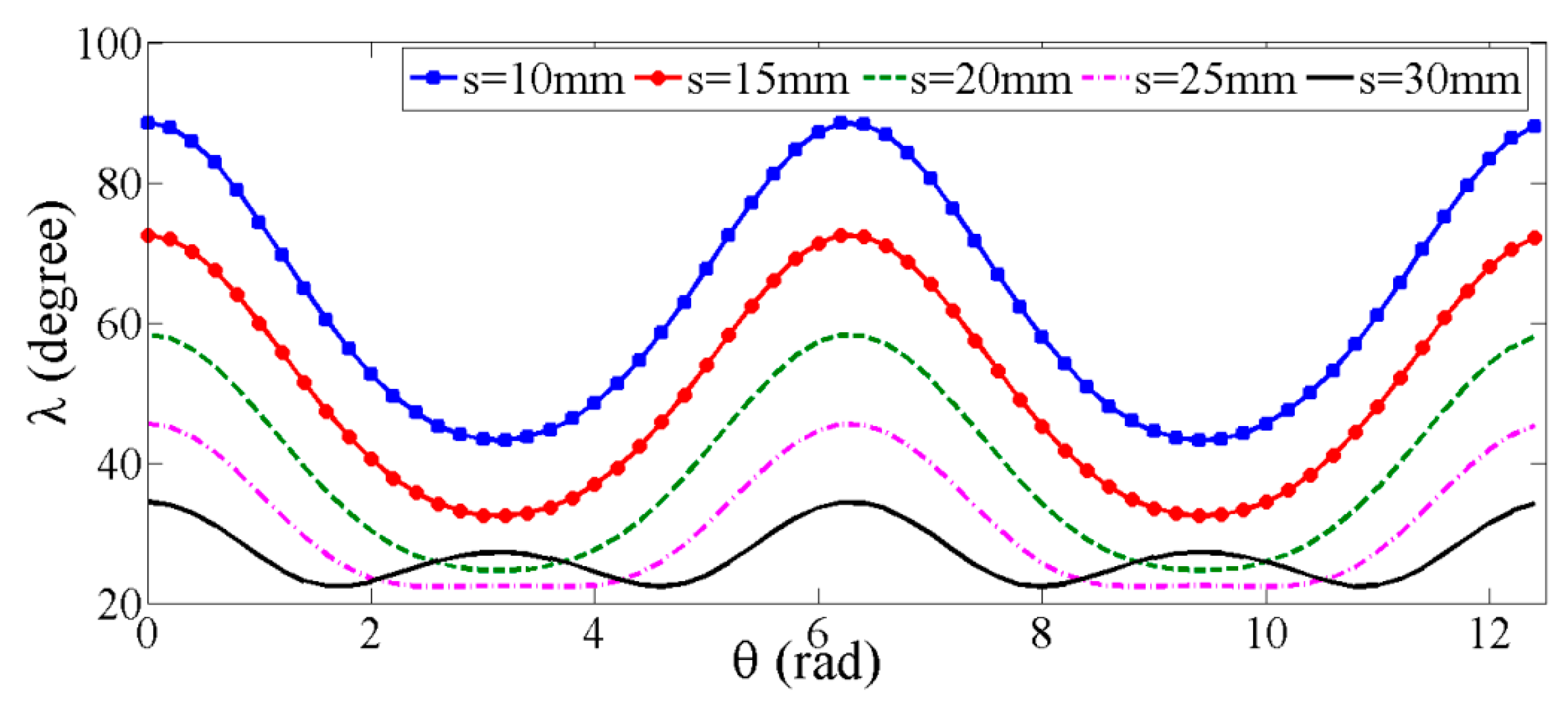
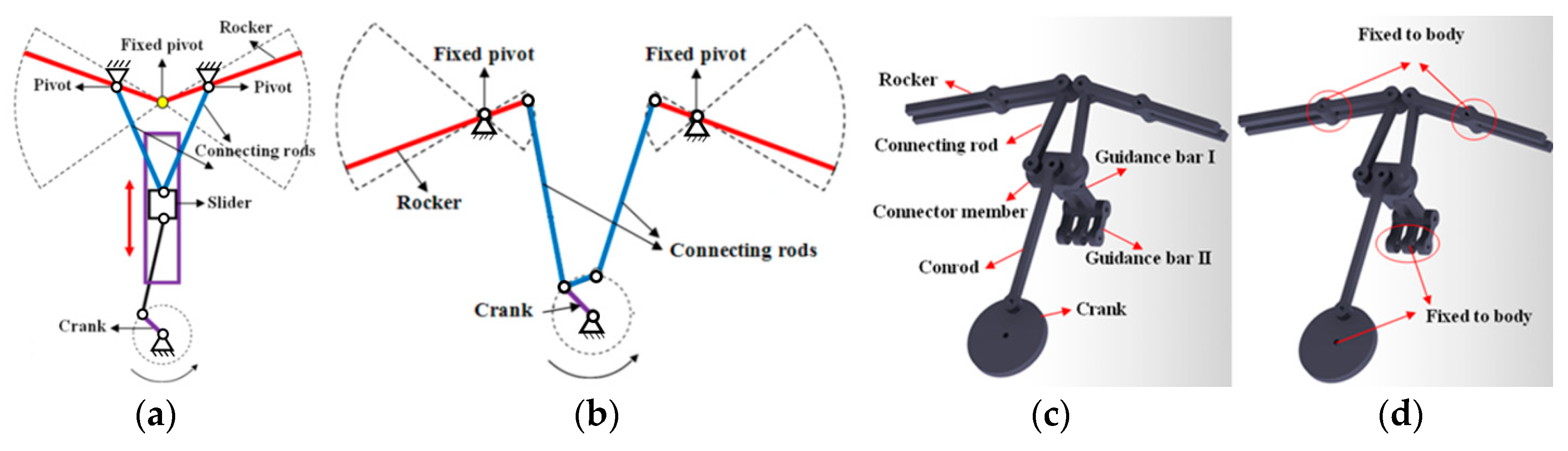
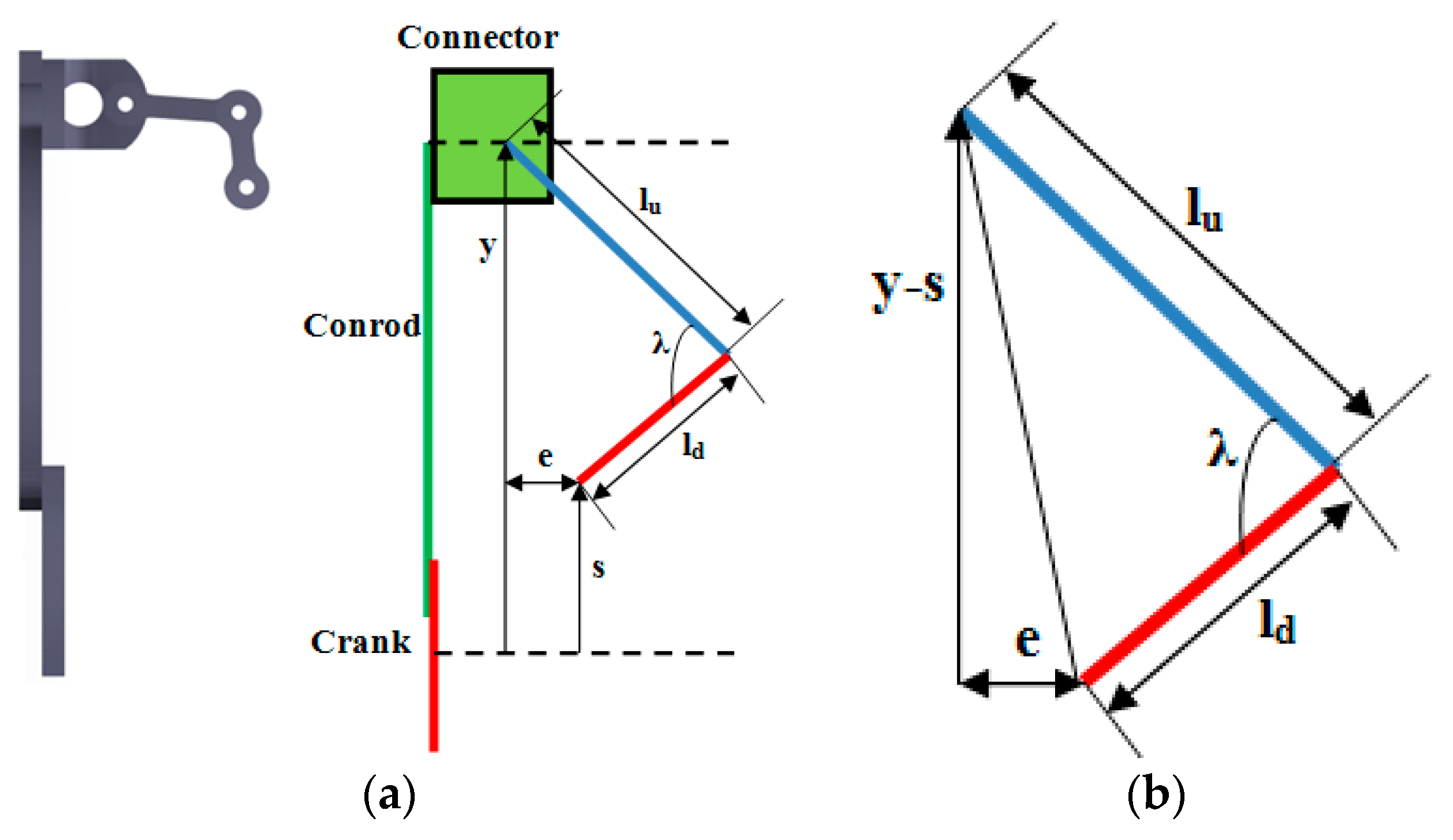
3.3. Designing of the Guidance Bars
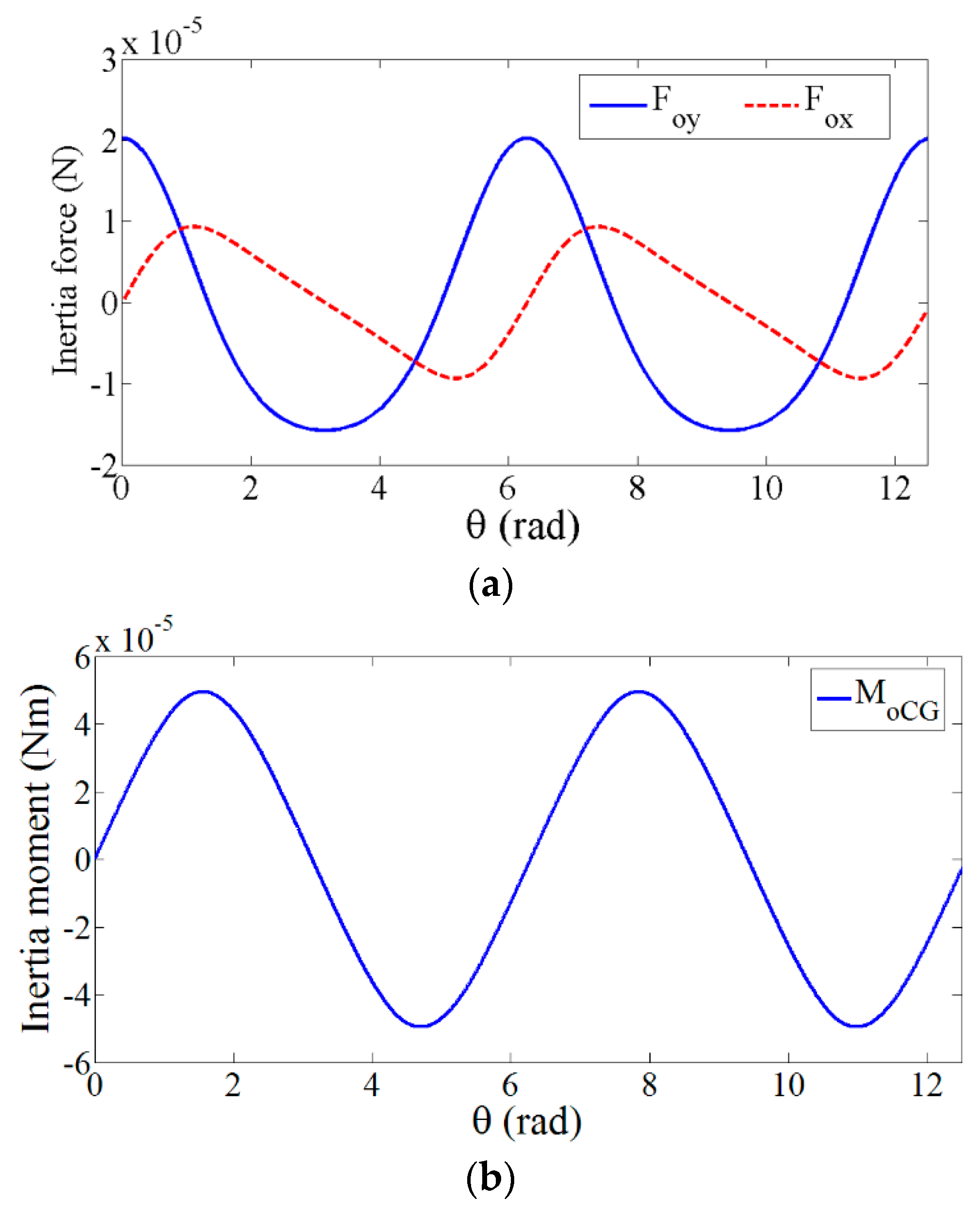
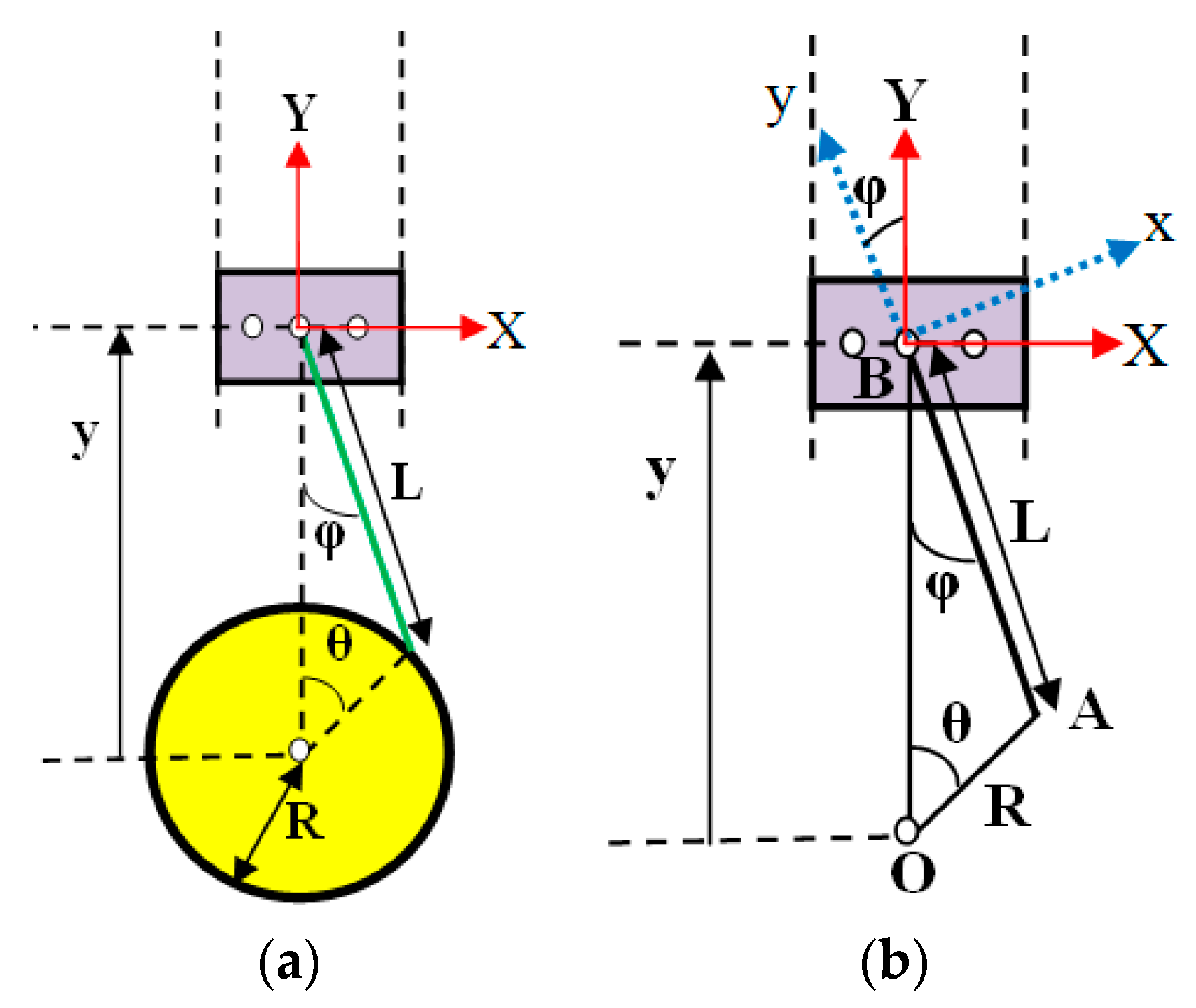
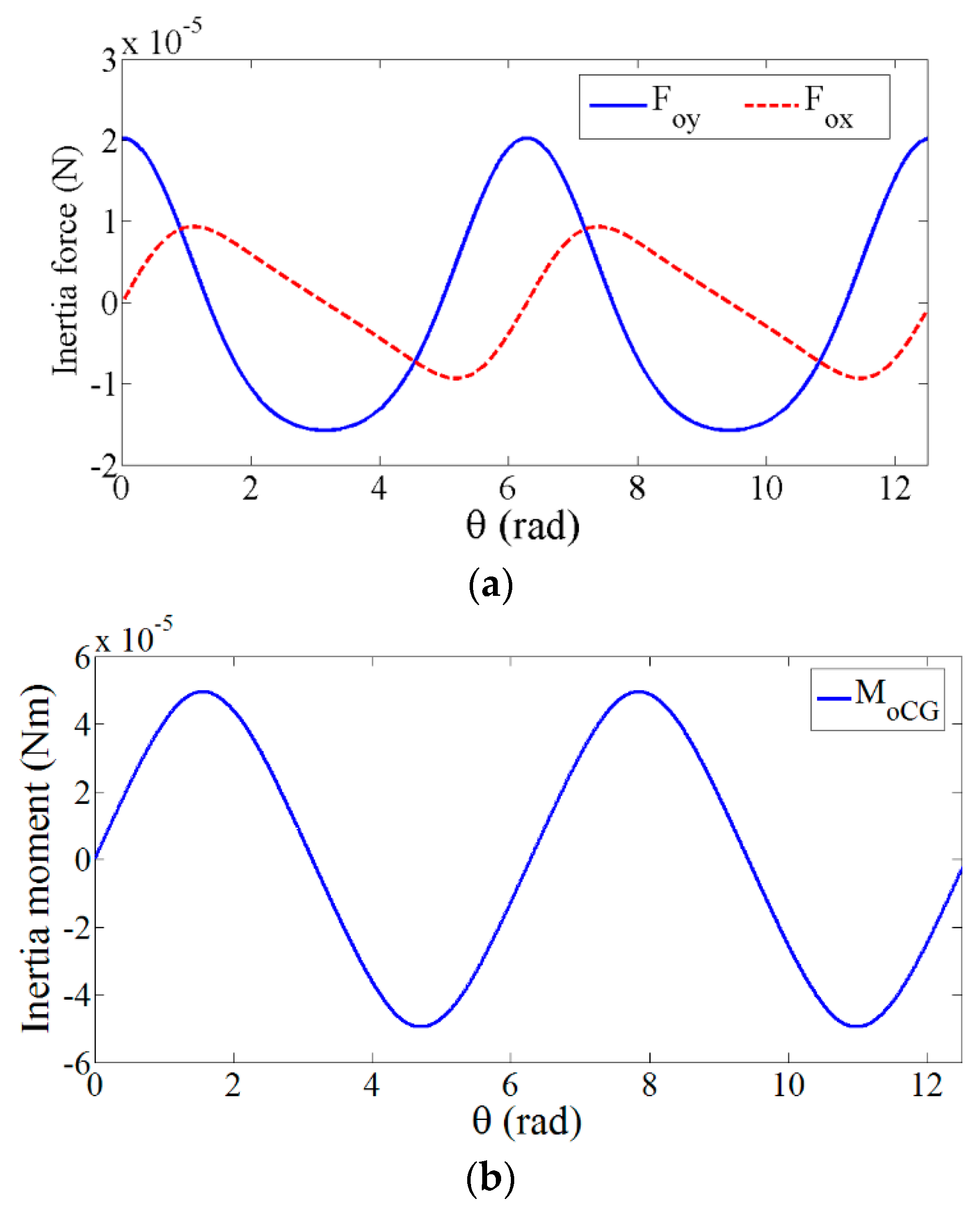
3.4. Dynamic Analysis of the Designed Actuation Mechanism
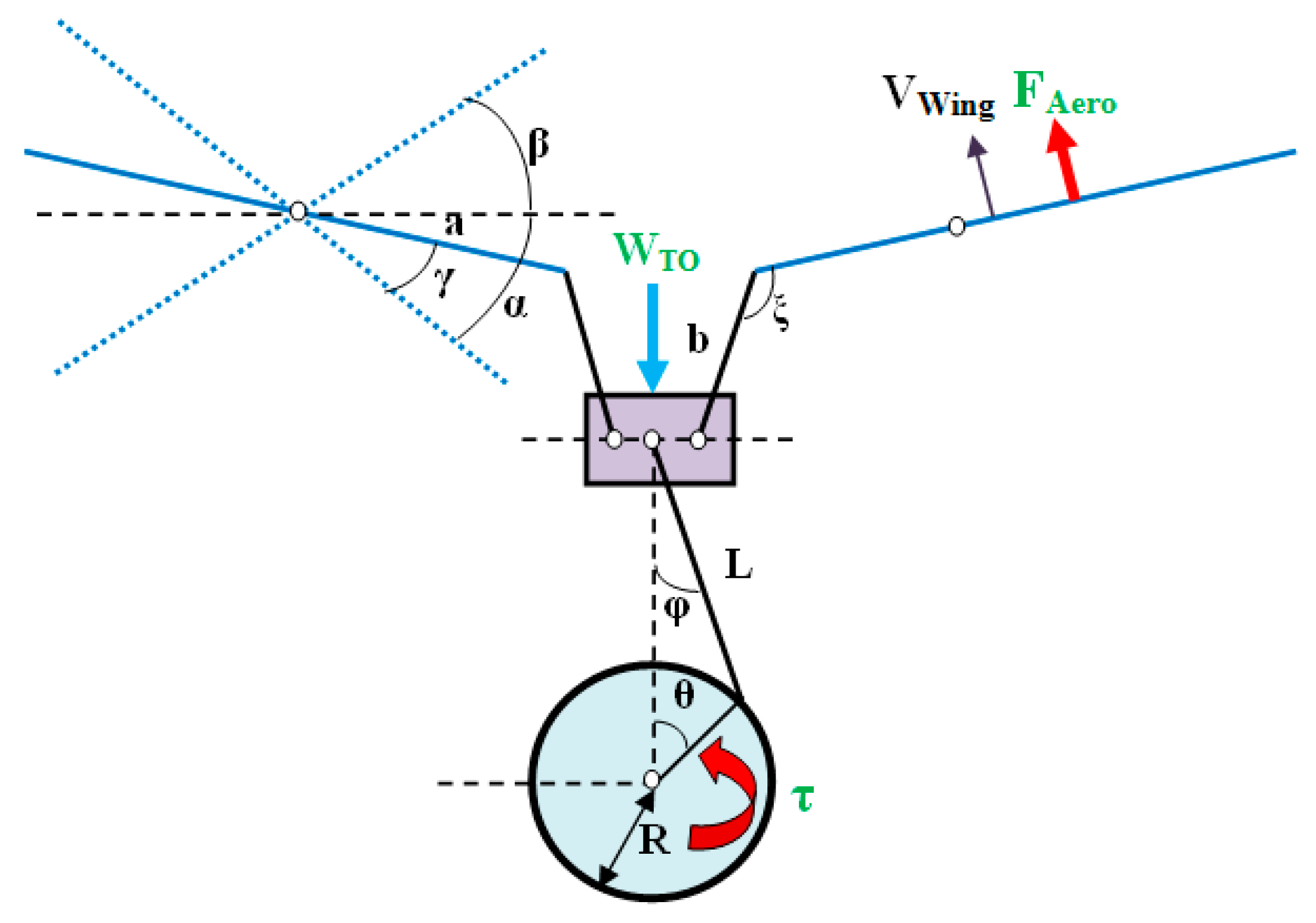
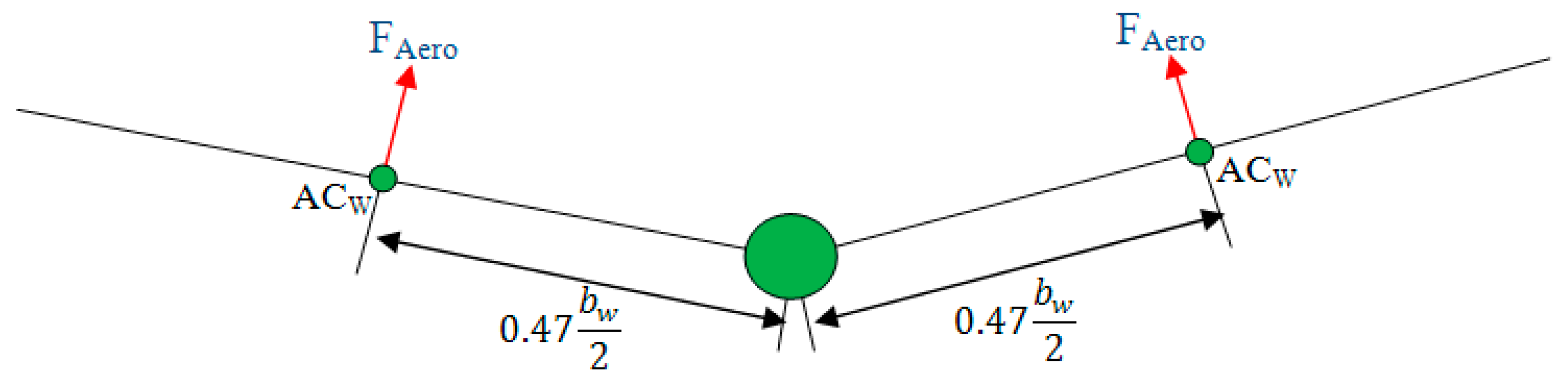
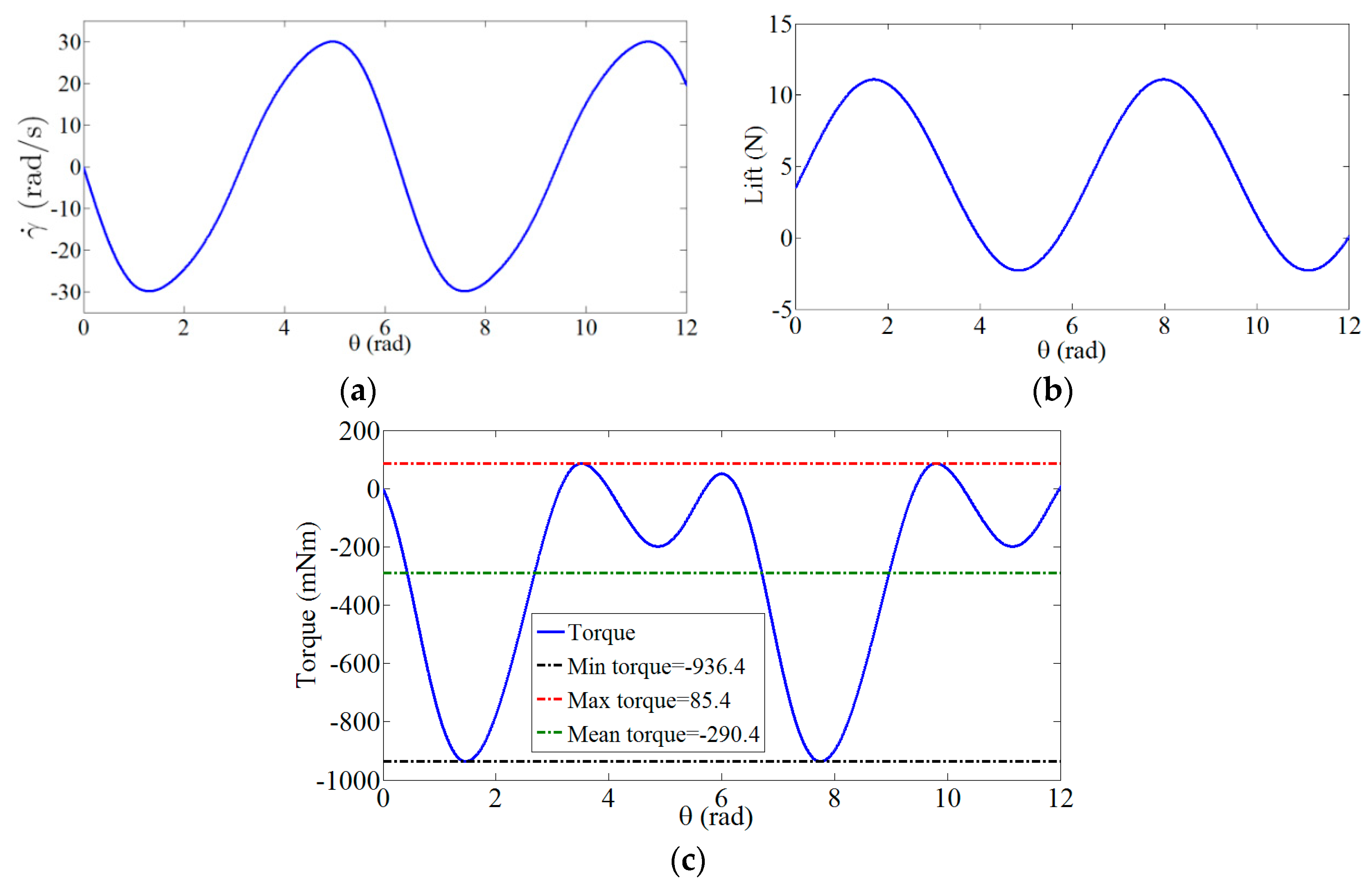
3.5. Required Torque and Power
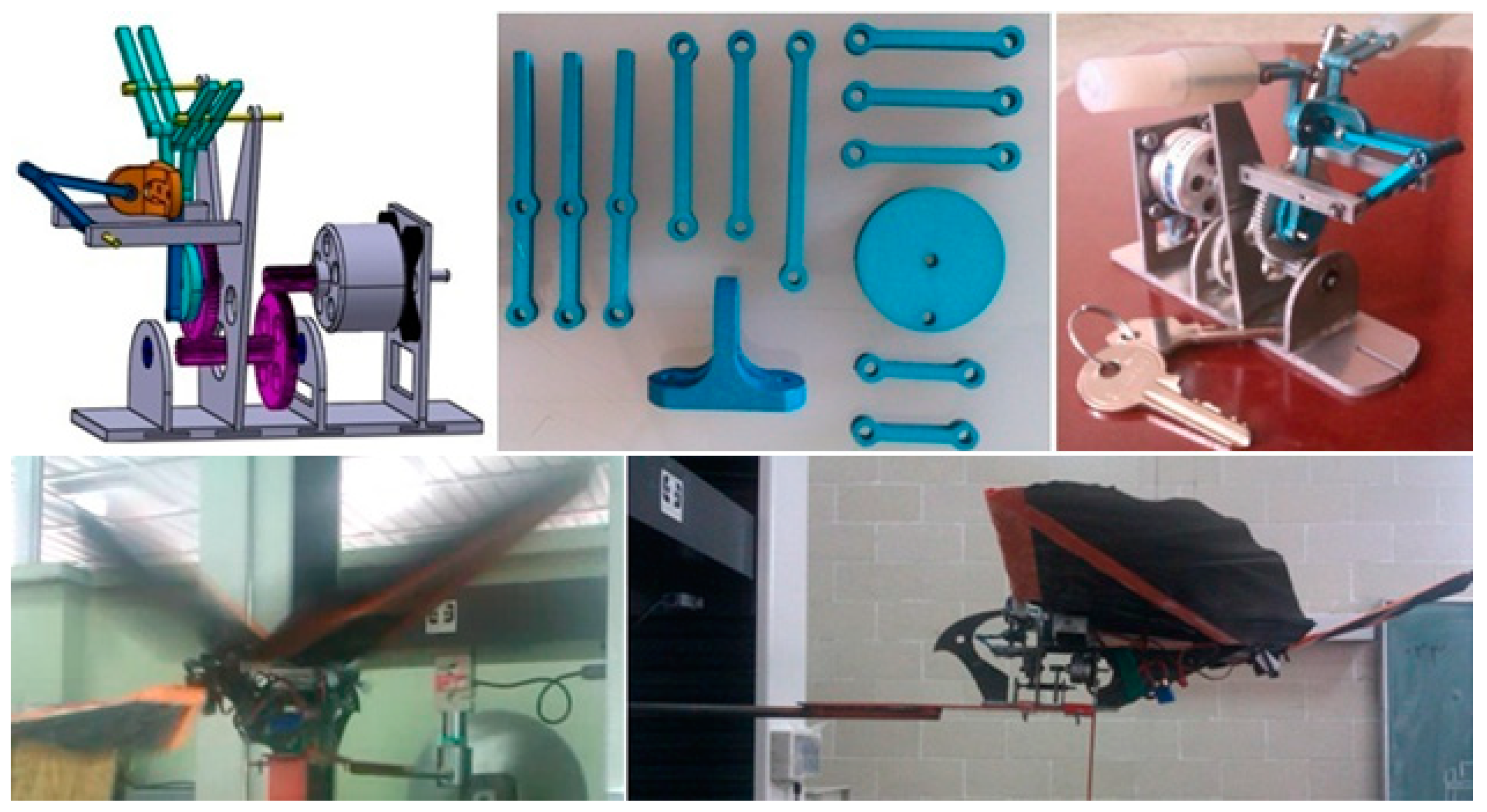
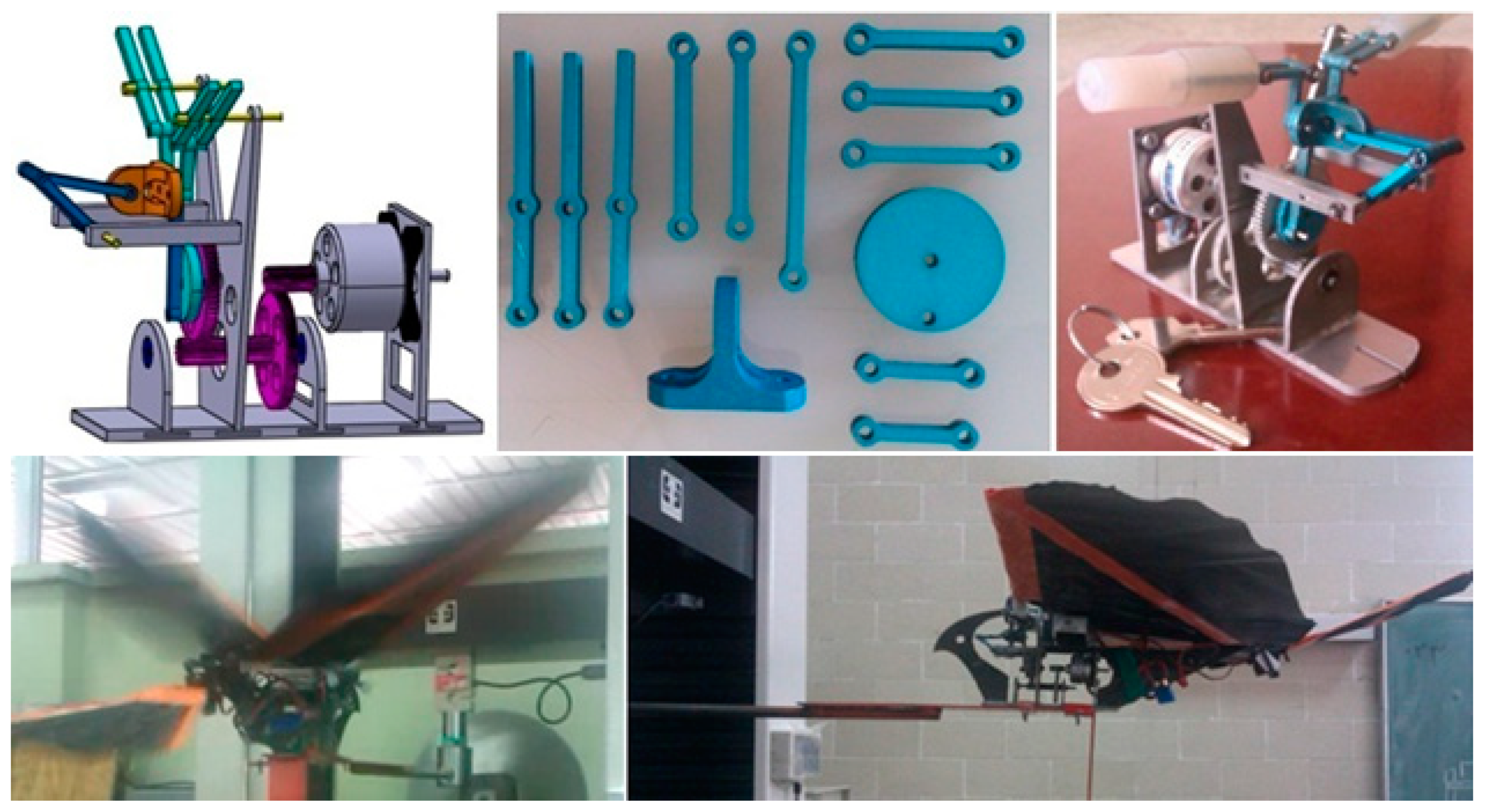
4. Fabrication and Experimental Testing of the Hybrid Actuation Mechanism
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wood, R.J.; Finio, B.; Karpelson, M.; Ma, K.; Pérez-Arancibia, N.O.; Sreetharan, P.S.; Tanaka, H.; Whitney, J.P. Progress on ‘pico’ air vehicles. Int. J. Robot. Res. 2012, 31, 1292–1302. [Google Scholar] [CrossRef]
- Hassanalian, M.; Throneberry, G.; Abdelkefi, A. Investigation on the planform and kinematic optimization of bio-inspired nano air vehicles for hovering applications. Meccanica 2018, 53, 2273–2286. [Google Scholar] [CrossRef]
- Lin, C.S.; Hwu, C.; Young, W.B. The thrust and lift of an ornithopter’s membrane wings with simple flapping motion. Aerosp. Sci. Technol. 2006, 10, 111–119. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A.; Wei, M.; Ziaei-Rad, S. A novel methodology for wing sizing of bio-inspired flapping wing micro air vehicles: Theory and prototype. Acta Mech. 2016. [Google Scholar] [CrossRef]
- Hassanalian, M.; Throneberry, G.; Abdelkefi, A. Wing shape and dynamic twist design of bio-inspired nano air vehicles for forward flight purposes. Aerosp. Sci. Technol. 2017, 68, 518–529. [Google Scholar] [CrossRef]
- Guo, S.; Li, D.; Wu, J. Theoretical and experimental study of a piezoelectric flapping wing rotor for micro aerial vehicle. Aerosp. Sci. Technol. 2012, 23, 429–438. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Tsai, B.J.; Fu, Y.C. Design and aerodynamic analysis of a flapping-wing micro aerial vehicle. Aerosp. Sci. Technol. 2009, 13, 383–392. [Google Scholar] [CrossRef]
- Abdullah, E.J.; Majid, D.L.; Romli, F.I.; Gaikwad, P.S.; Yuan, L.G.; Harun, N.F. Active control of strain in a composite plate using shape memory alloy actuators. Int. J. Mech. Mater. Des. 2015, 11, 25–39. [Google Scholar] [CrossRef]
- Mateti, K. Flapping Wing Mechanisms for Pico Air Vehicle Using Piezoelectric Actuators. Ph.D. Thesis, The Pennsylvania State University, State College, PA, USA, May 2012. [Google Scholar]
- Sabri, F.; Meguid, S.A. Flutter boundary prediction of an adaptive morphing wing for unmanned aerial vehicle. Int. J. Mech. Mater. Des. 2011, 7, 307. [Google Scholar] [CrossRef]
- Bruggerman, B. Improving Flight Performance of DelFly II in Hover by Improving Wing Design and Driving Mechanism. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2010. [Google Scholar]
- Chand, A.N.; Kawanishi, M.; Narikiyo, T. Design analysis, modeling and experimental validation of a bird-like flapping-wing flying robot. In Proceedings of the IMAV 2014 International Micro Air Vehicle Conference and Competition 2014, Delft, The Netherlands, 12–15 August 2014. [Google Scholar]
- Sean Kinkade Ornithopter. U.S. Patent 9,858,922, 17 May 2001.
- Tandon, A.; Vajpai, A.; Mishra, A.N. Design of an autonomous ornithopter with live video reception for military surveillance. Int. J. Res. Eng. Technol. 2013, 2, 489–493. [Google Scholar]
- Ghommem, M.; Hassanalian, M.; Al-Marzooqi, M.; Throneberry, G.; Abdelkefi, A. Sizing process, aerodynamic analysis, and experimental assessment of a biplane flapping wing nano air vehicle. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2009; 0954410019852570. [Google Scholar]
- Keennon, M.; Klingebiel, K.; Won, H.; Andriukov, A. Tailless Flapping Wing Propulsion and Control Development for the Nano Hummingbird Micro Air Vehicle. In Proceedings of the American Helicopter Society Future Vertical Lift Aircraft Design Conference, San Francisco, CA, USA, 18–20 January 2012. [Google Scholar]
- Keennon, M.T.; Klingebiel, K.R.; Won, H.; Andriukov, A. Development of the nano hummingbird: A tailless flapping wing micro air vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar]
- Nano Hummingbird. Available online: http://www.avinc.com/nano (accessed on 29 February 2012).
- Nguyen, Q.V.; Chan, W.L.; Debiasi, M. Hybrid design and performance tests of a hovering insect-inspired flapping-wing micro aerial vehicle. J. Bionic Eng. 2016, 13, 235–248. [Google Scholar] [CrossRef]
- Roshanbin, A.; Altartouri, H.; Karasek, M.; Preumont, A. COLIBRI: A hovering flapping twin-wing robot. Int. J. Micro Air Veh. 2017, 9, 270–282. [Google Scholar] [CrossRef]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled flight of a biologically inspired, insect-scale robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef]
- Leal, P.B.; Savi, M.A. Shape memory alloy-based mechanism for aeronautical application: Theory, optimization and experiment. Aerosp. Sci. Technol. 2018, 76, 155–163. [Google Scholar] [CrossRef]
- Fenelon, M.A.A.; Furukawa, T. Design of an active flapping wing mechanism and a micro aerial vehicle using a rotary actuator. Mech. Mach. Theory 2010, 45, 137–146. [Google Scholar] [CrossRef]
- Madangopal, R.; Khan, Z.A.; Agrawal, S.K. Biologically inspired design of small flapping wing air vehicles using four-bar mechanisms and quasi-steady aerodynamics. J. Mech. Des. 2005, 127, 809–816. [Google Scholar] [CrossRef]
- Cox, A.; Monopoli, D.; Cveticanin, D.; Goldfarb, M.; Garcia, E. The development of elastodynamic components for piezoelectrically actuated flapping micro-air vehicles. J. Intell. Mater. Syst. Struct. 2002, 13, 611–615. [Google Scholar] [CrossRef]
- Karpelson, M.; Wei, G.Y.; Wood, R.J. A review of actuation and power electronics options for flapping wing robotic insects. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008. [Google Scholar]
- Benedict, M.; Sudhakar, K.; Issac, K.K. Aeroelastic Design and Manufacture of an Efficient Ornithopter Wing; Department of Aerospace Engineering, Indian Institute of Technology: Mumbai, India, 2004. [Google Scholar]
- Zhao, J.S.; Yan, Z.F.; Ye, L. Design of planar four-bar linkage with n specified positions for a flapping wing robot. Mech. Mach. Theory 2014, 82, 33–55. [Google Scholar] [CrossRef]
- Salazar, R.; Hassanalian, M.; Abdelkefi, A. Defining a conceptual design for a tilt-rotor micro air vehicle for a well-defined mission. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Gerrard, C.; Ward, M. Final Year Honours Project Micro Air Vehicle; The University of Adelaide: Adelaide, Australia, 2007. [Google Scholar]
- Singh, S.M. Flapping wings, a theoretical approach. Int. J. Eng. Sci. Adv. Technol. 2014, 4, 220–225. [Google Scholar]
- Yusoff, H.; Abdullah, M.Z.; Mujeebu, M.A.; Ahmad, K.A. Development of Flexible Wings and Flapping Mechanism with Integrated Electronic Control System, for Micro Air Vehicle Research. Exp. Tech. 2013, 37, 25–37. [Google Scholar] [CrossRef]
- Liu, L.; Fang, Z.; He, Z. Optimization design of flapping mechanism and wings for flapping-wing MAVs. Intell. Robot. Appl. 2008, 5314, 245–255. [Google Scholar]
- Beasley, B. A Study of Planar and Nonplaner Membrane Wing Planforms for the Design of a Flapping Wing Micro Air Vehicle. Master’s Thesis, Department of Aerospace Engineering, University of Maryland, College Park, MD, USA, 2006. [Google Scholar]
- Ryan, M. Design Optimization and Classification of Compliant Mechanisms for Flapping Wing Micro Air Vehicles. Master’s Thesis, Department of Mechanical Engineering, The Ohio State University, Columbus, OH, USA, 2012. [Google Scholar]
- Srinath, A.; Wood, R.J.; Campolo, D.; Fearing, R.S. Dynamically tuned design of the MFI thorax. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 52–59. [Google Scholar]
- Srinath, A.; Wood, R.J.; Steltz, E.; Yan, J.; Fearing, R.S. Lift force improvements for the micromechanical flying insect. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 2, pp. 1350–1356. [Google Scholar]
- Bejgerowski, W.; Gerdes, J.W.; Gupta, S.K.; Bruck, H.A.; Wilkerson, S. Design and fabrication of a multi-material compliant flapping wing drive mechanism for miniature air vehicles. In Proceedings of the ASME 2010 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, American Society of Mechanical Engineers, Monteral, QC, Canada, 15–18 August 2012. [Google Scholar]
- Bejgerowski, W.; Ananthanarayanan, A.; Mueller, D.; Gupta, S.K. Integrated product and process design for a flapping wing drive mechanism. J. Mech. Des. 2009, 131, 061006. [Google Scholar] [CrossRef]
- Jeon, J.; Cho, H.; Kim, Y.; Lee, J.; Gong, D.; Shin, S.; Kim, C. Design and analysis of the link mechanism for the flapping wing MAV using flexible multi-body dynamic analysis. Int. J. Micro Air Veh. 2017, 9, 253–269. [Google Scholar] [CrossRef]
- Tantanawat, T.; Kota, S. Design of compliant mechanisms for minimizing input power in dynamic applications. J. Mech. Des. 2007, 129, 1064–1075. [Google Scholar] [CrossRef]
- Gerdes, J.W.; Gupta, S.K.; Wilkerson, S.A. A review of bird-inspired flapping wing miniature air vehicle designs. J. Mech. Robot. 2012, 4, 021003. [Google Scholar] [CrossRef]
- Zhang, C.; Rossi, C. A review of compliant transmission mechanisms for bio-inspired flapping-wing micro air vehicles. Bioinspiration Biomim. 2017, 12, 025005. [Google Scholar] [CrossRef]
- Zhang, C.; Rossi, C. Effects of elastic hinges on input torque requirements for a motorized indirect-driven flapping-wing compliant transmission mechanism. IEEE Access 2019, 7, 13068–13077. [Google Scholar] [CrossRef]
- Gerdes, J.W. Design, Analysis, and Testing of a Flapping Wing Miniature Air Vehicle. Master’s Thesis, Mechanical Engineering Dept., University of Maryland, College Park, MD, USA, 2010. [Google Scholar]
- Kurdi, M.; Beran, P.; Stanford, B.; Snyder, R. Optimal actuation of nonlinear resonant systems. Struct. Multidiscip. Optim. 2010, 41, 65–86. [Google Scholar] [CrossRef]
- Venkiteswaran, V.K.; Su, H.J. Optimization of mechanism design of flapping wing MAV. In Proceedings of the 55th AIAA/ASME/ASCE/AHS/SC Structures, Structural Dynamics, and Materials Conference, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar]
- Hassanalian, M.; Abdelkefi, A. Design, manufacturing, and flight testing of a fixed wing micro air vehicle with Zimmerman planform. Meccanica 2016, 1–18. [Google Scholar] [CrossRef]
- Meguid, S.A.; Su, Y.; Wang, Y. Complete morphing wing design using flexible-rib system. Int. J. Mech. Mater. Des. 2017, 13, 159–171. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Methodologies for weight estimation of fixed and flapping wing micro air vehicles. Meccanica 2017, 52, 2047–2068. [Google Scholar] [CrossRef]
- Zhang, T.; Zhou, C.; Wang, C.; Zhang, X. Flapping wing mechanism design based on mechanical creative design theory. In Proceedings of the International Conference on Mechatronic Science, Electric Engineering and Computer, Jilin, China, 19–22 August 2011. [Google Scholar]
- Mason, M.; Fairbanks, T.; King, J.; Stanfield, M. MAV Ornithopter; Department of Mechanical Engineering, University of Utah: Salt Lake City, UT, USA, 2008. [Google Scholar]
- Beng, T.W. Dynamics and Control of a Flapping Wing Aircraft. Master’s Thesis, Mechanical Engineering Dept., National University of Singapore, Singapore, 2003. [Google Scholar]
- Kimbrell, J.T. Kinematics Analysis and Synthesis; McGraw-Hill, Inc.: New York, NY, USA, 1991. [Google Scholar]
- Mabie, H.H.; Reinholtz, C.F. Mechanisms and Dynamics of Machinery; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1987. [Google Scholar]
- Available online:. Available online: http://ocw.metu.edu.tr/pluginfile.php/3957/mod_resource/content/0/ch7/7-1.htm (accessed on 12 August 2019).
- Phan, H.V.; Nguyen, Q.V.; Truong, Q.T.; Van Truong, T.; Park, H.C.; Goo, N.S.; Kim, M.J. Stable vertical takeoff of an insect-mimicking flapping-wing system without guide implementing inherent pitching stability. J. Bionic Eng. 2012, 9, 391–401. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
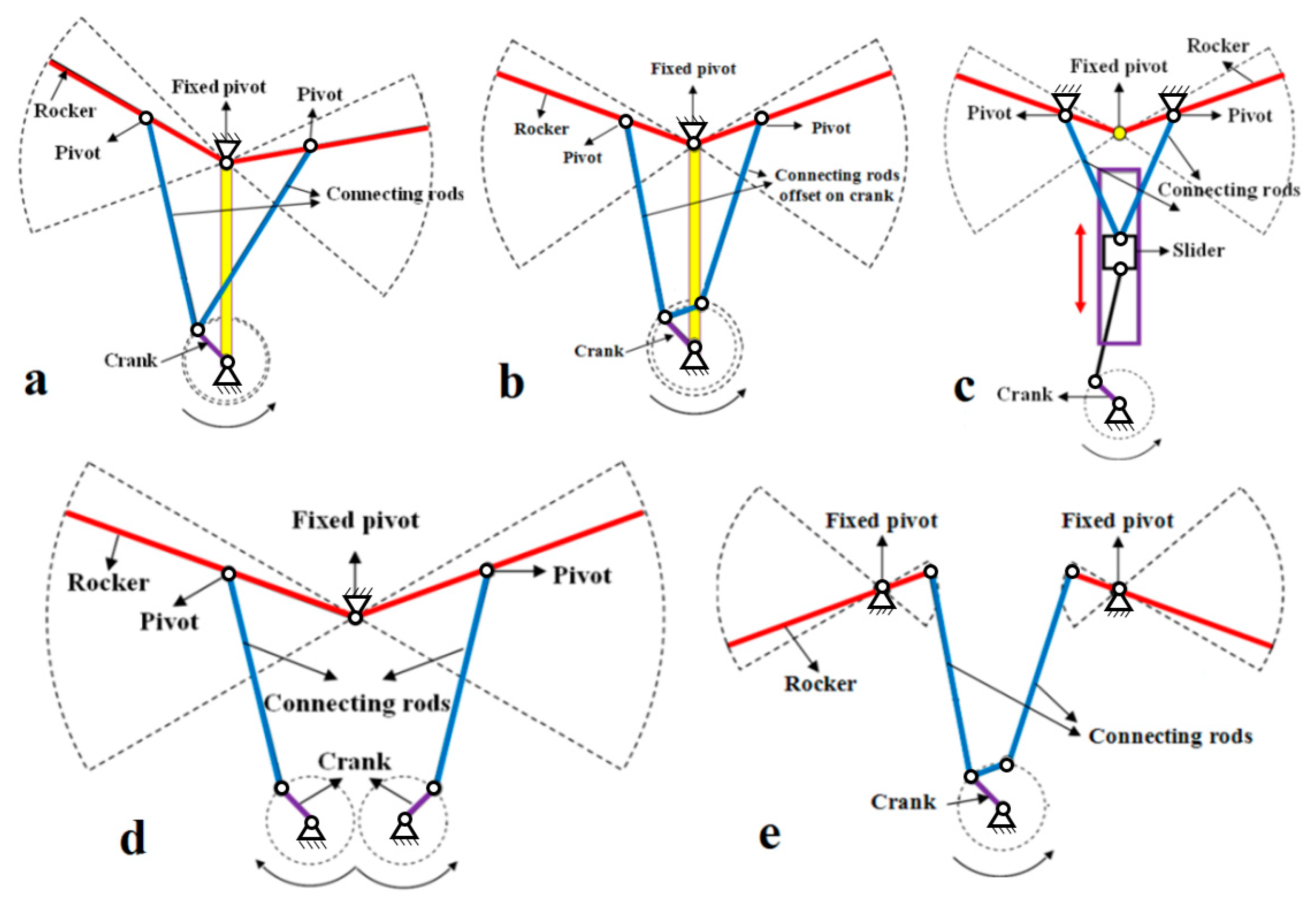
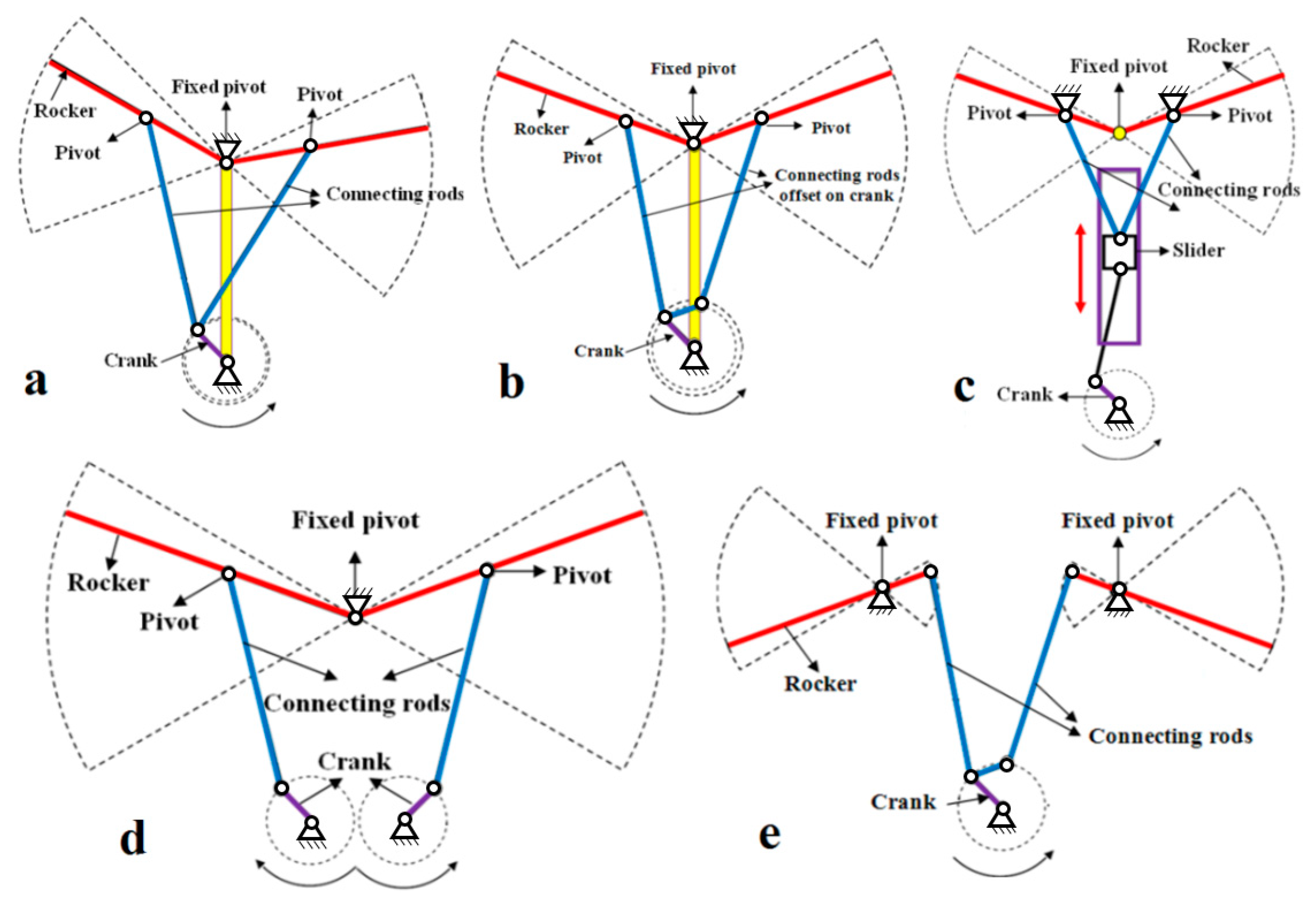
| Mechanism Type | Advantages | Drawbacks |
|---|---|---|
| Single crank | Simplest and lightest | Neither completely symmetrical nor harmonic flapping wing motion |
| Single crank with offset | Simple, light weight, symmetrical motion, and little phase difference between the flapping of the two half wings | Crossing each other of the rockers when they are in the same vertical plane |
| Slider crank | Symmetrical flapping motion | Frictional losses and difficulty in fabrication |
| Double crank | Symmetrical flapping motion | Complexity, high weight, and out of phase motion |
| Alternate configuration | Providing the same flapping motion | Cannot be used by biplane flapping wing, and non-symmetrical shape |
| Parameter | Mode (1) | Mode (2) | Mode (3) | Mode (4) | Mode (5) |
|---|---|---|---|---|---|
| R (mm) | 8 | 8 | 8 | 8 | 8 |
| a (mm) | 19.38 | 17.68 | 17.68 | 16.68 | 15.6 |
| b (mm) | 15 | 12 | 13.35 | 13.35 | 13.8 |
| H (mm) | 45.75 | 45.75 | 45.75 | 45.75 | 45.86 |
| C (mm) | 20 | 20 | 20 | 20 | 15.6 |
| L/R | 4 | 4 | 4 | 4 | 4 |
| γmax | 59.69 | 51.2 | 55.6 | 55.9 | 62 |
| γmin | 11.33 | −10.8 | 0 | −6.1 | 0 |
| γmax−γmin | 48.36 | 62 | 55.6 | 62 | 62 |
| ξmax | 117.9 | 169 | 144.1 | 159.3 | 136.1 |
| ξmin | 73.25 | 86.82 | 82.97 | 86.99 | 72.94 |
| ξmax − ξmin | 44.65 | 82.18 | 61.13 | 72.31 | 63.16 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| lu | 25 mm | e | 10 mm |
| ld | 20 mm | s | 15 mm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hassanalian, M.; Abdelkefi, A. Towards Improved Hybrid Actuation Mechanisms for Flapping Wing Micro Air Vehicles: Analytical and Experimental Investigations. Drones 2019, 3, 73. https://doi.org/10.3390/drones3030073
Hassanalian M, Abdelkefi A. Towards Improved Hybrid Actuation Mechanisms for Flapping Wing Micro Air Vehicles: Analytical and Experimental Investigations. Drones. 2019; 3(3):73. https://doi.org/10.3390/drones3030073
Chicago/Turabian StyleHassanalian, Mostafa, and Abdessattar Abdelkefi. 2019. "Towards Improved Hybrid Actuation Mechanisms for Flapping Wing Micro Air Vehicles: Analytical and Experimental Investigations" Drones 3, no. 3: 73. https://doi.org/10.3390/drones3030073
APA StyleHassanalian, M., & Abdelkefi, A. (2019). Towards Improved Hybrid Actuation Mechanisms for Flapping Wing Micro Air Vehicles: Analytical and Experimental Investigations. Drones, 3(3), 73. https://doi.org/10.3390/drones3030073