Enhancement of Ecological Field Experimental Research by Means of UAV Multispectral Sensing



Abstract

1. Introduction
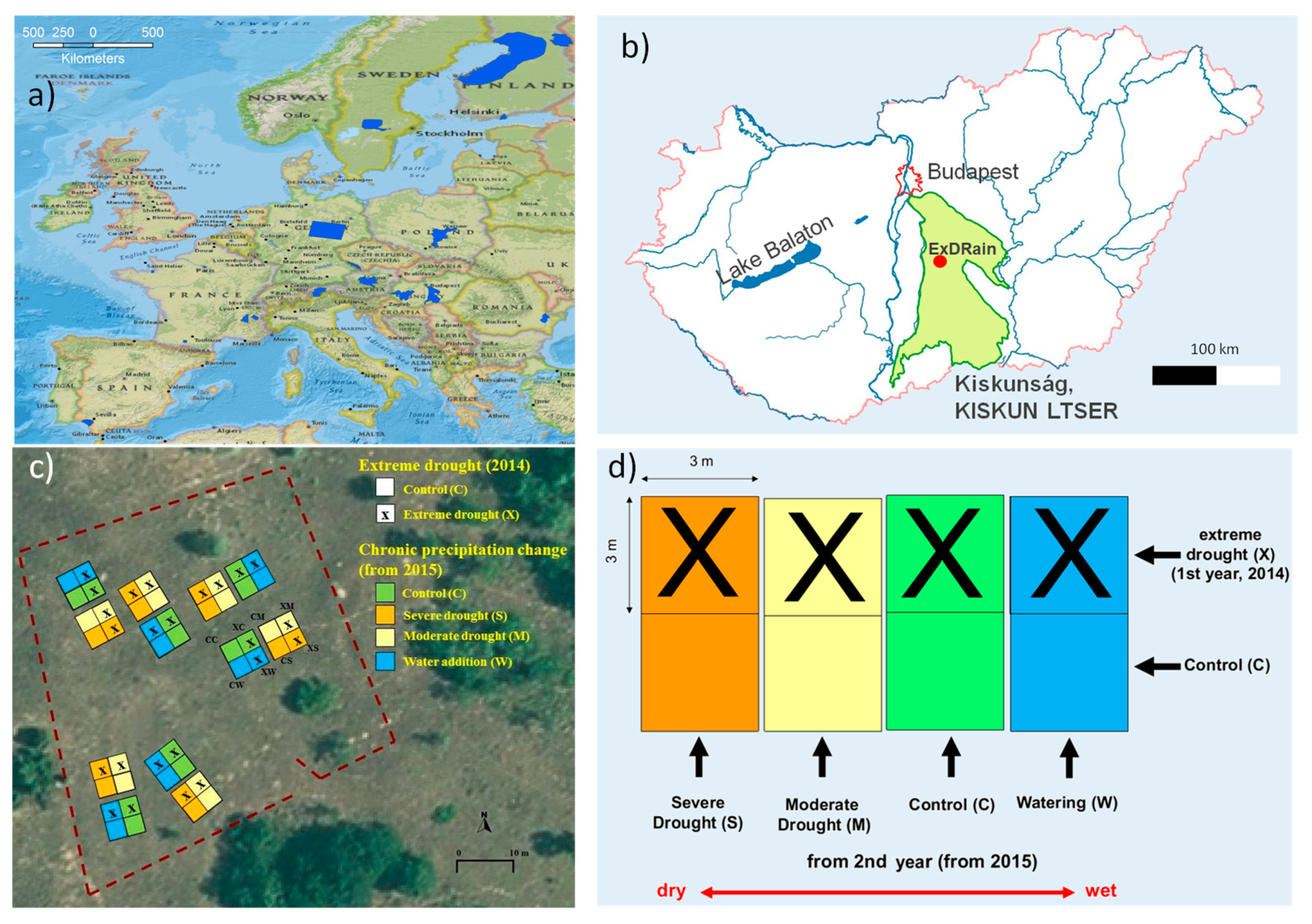
2. Study Site and Experimental Design
2.1. Kiskun LTER Site
2.2. ExDRain Experiment
3. Materials and Methods
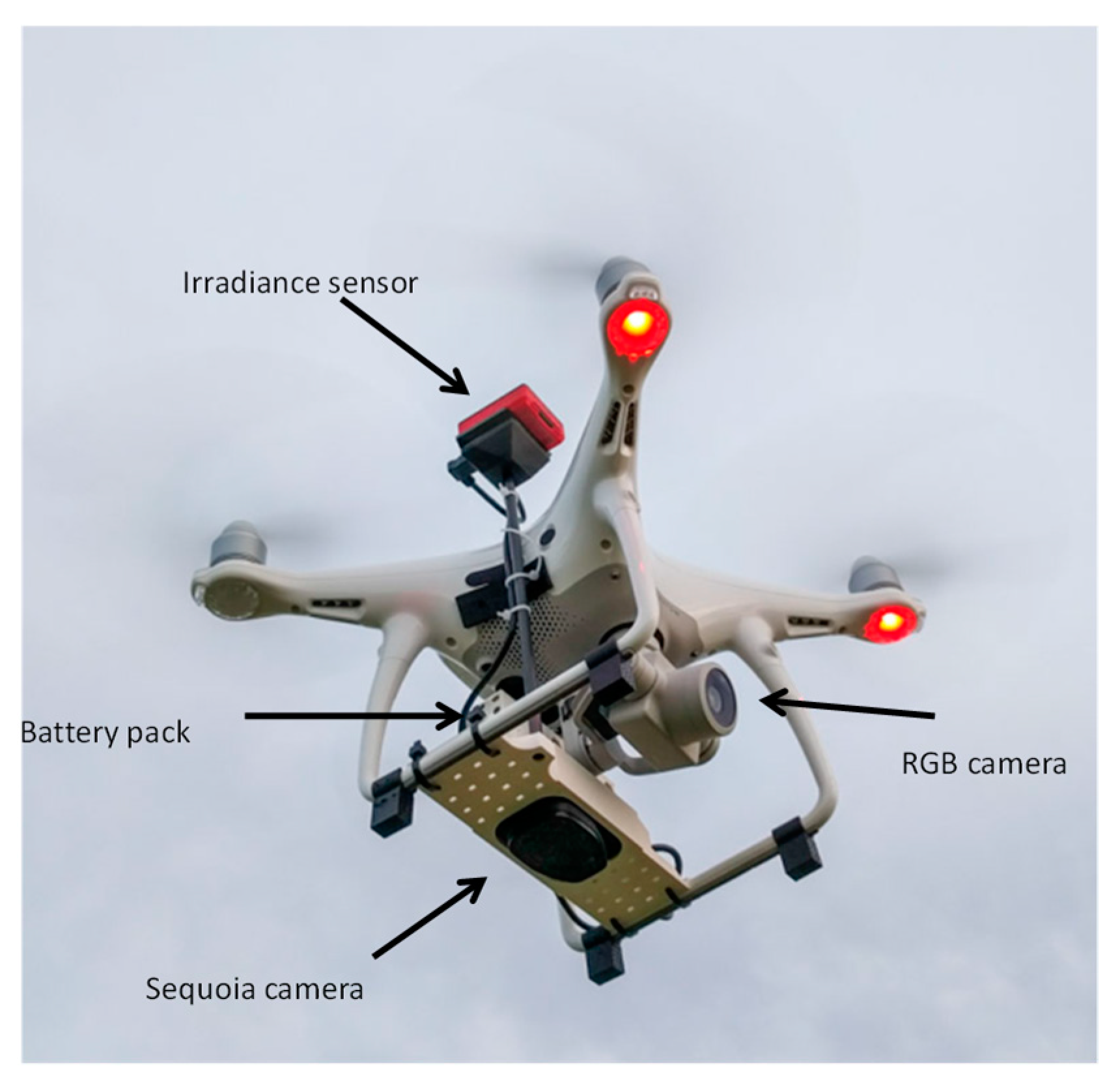
3.1. UAV and Equipment
3.2. Mission Planning and Geometric Processing
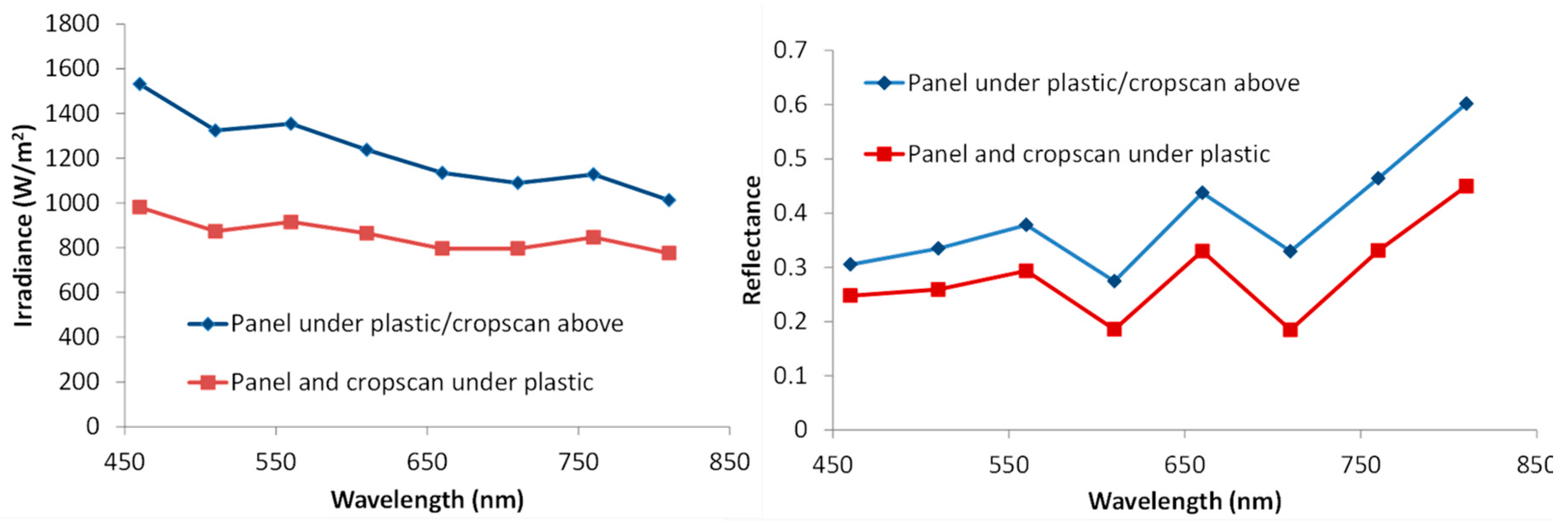
3.3. Ground-Truth Sampling and Assessment of Plastic Effect
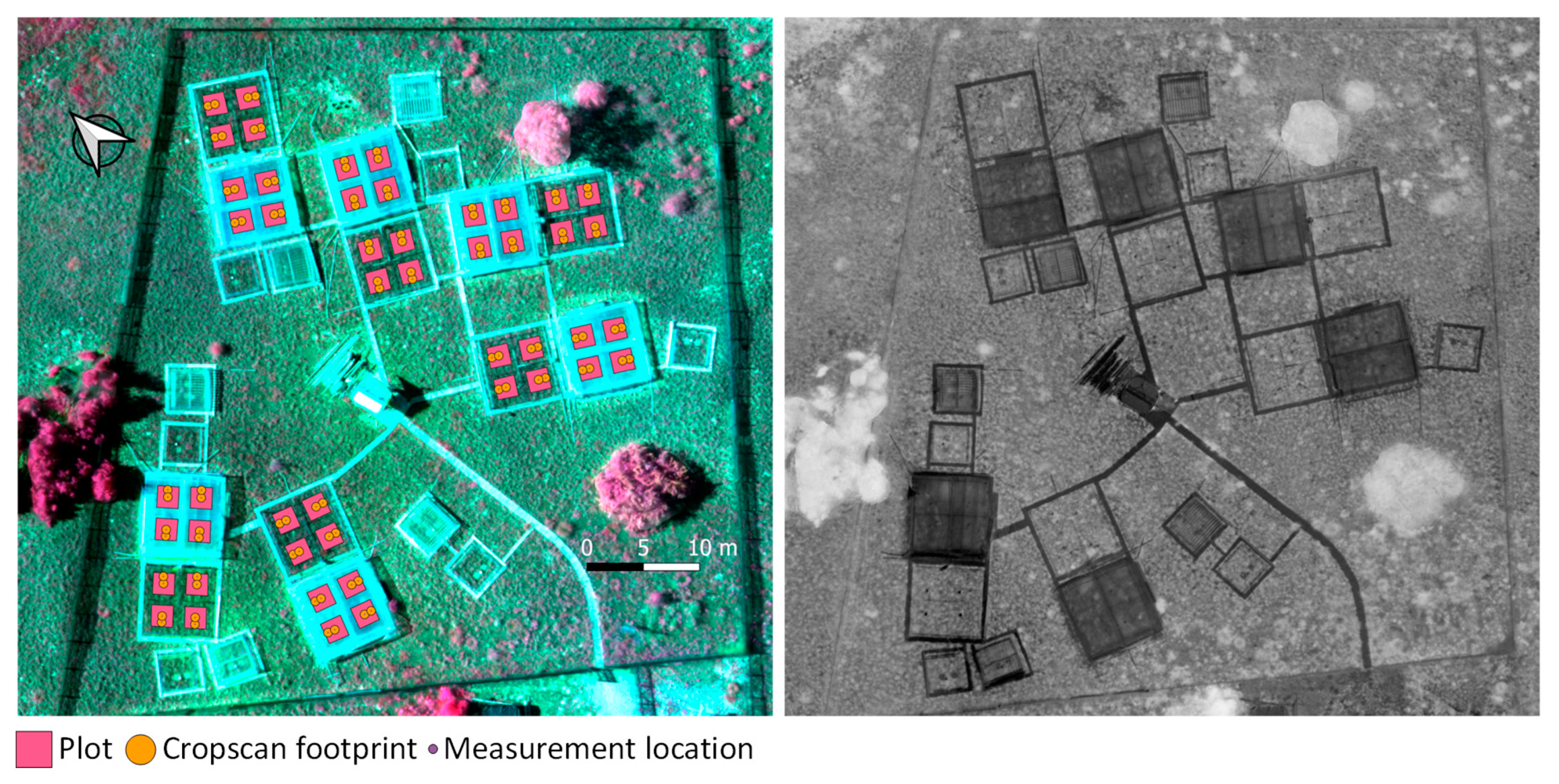
3.4. Multiscale Analysis and Spatial Variability
- Pixel value at the point scale (n = 96).
- Average value at the FOV scale (0.75 m diameter buffer around point measurements, n = 96).
- Average value at the plot scale (3 × 3 m, n = 48).
4. Results
4.1. Geometric Accuracy of UAV Multispectral and RGB Orthomosaics
4.2. Plastic Effect
4.3. Multiscale Comparison
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Haase, P.; Tonkin, J.D.; Stoll, S.; Burkhard, B.; Frenzel, M.; Geijzendorffer, I.R.; Häuser, C.; Klotz, S.; Kühn, I.; McDowell, W.H.; et al. The next generation of site-based long-term ecological monitoring: Linking essential biodiversity variables and ecosystem integrity. Sci. Total Environ. 2018, 613–614, 1376–1384. [Google Scholar] [CrossRef] [PubMed]
- Schimel, D.; Hargrove, W.; Hoffman, F.; MacMahon, J. NEON: A hierarchically designed national ecological network. Front. Ecol. Environ. 2007, 5, 59. [Google Scholar] [CrossRef]
- Peterson, T.; Daan, H.; Jones, P. Initial Selection of a GCOS Surface Network. Bull. Am. Meteorol. Soc. 1997, 78, 2145–2152. [Google Scholar] [CrossRef]
- Clobert, J.; Chanzy, A.; Le Galliard, J.-F.; Chabbi, A.; Greiveldinger, L.; Caquet, T.; Loreau, M.; Mougin, C.; Pichot, C.; Roy, J.; et al. How to Integrate Experimental Research Approaches in Ecological and Environmental Studies: AnaEE France as an Example. Front. Ecol. Evol. 2018, 6. [Google Scholar] [CrossRef]
- Knapp, A.K.; Avolio, M.L.; Beier, C.; Carroll, C.J.W.; Collins, S.L.; Dukes, J.S.; Fraser, L.H.; Griffin-Nolan, R.J.; Hoover, D.L.; Jentsch, A.; et al. Pushing precipitation to the extremes in distributed experiments: recommendations for simulating wet and dry years. Glob. Change Biol. 2017, 23, 1774–1782. [Google Scholar] [CrossRef] [PubMed]
- Ónodi, G.; Botta-Dukát, Z.; Kröel-Dulay, G.; Lellei-Kovács, E.; Kertész, M. Reduction in primary production followed by rapid recovery of plant biomass in response to repeated mid-season droughts in a semiarid shrubland. Plant Ecol. 2018, 219, 517–526. [Google Scholar] [CrossRef]
- Peterson, D.L.; Waring, R.H. Overview of the Oregon Transect Ecosystem Research Project. Ecol. Appl. 1994, 4, 211–225. [Google Scholar] [CrossRef]
- Li, X.; Liu, S.; Xiao, Q.; Ma, M.; Jin, R.; Che, T.; Wang, W.; Hu, X.; Xu, Z.; Wen, J.; et al. A multiscale dataset for understanding complex eco-hydrological processes in a heterogeneous oasis system. Sci. Data 2017, 4, 170083. [Google Scholar] [CrossRef] [PubMed]
- Gardner, R.H.; Kemp, W.M.; Kennedy, V.S.; Petersen, J.E. Scaling Relations in Experimental Ecology; Columbia University Press: New York, NY, USA, 2012; ISBN 978-0-231-52904-4. [Google Scholar]
- Díaz-Delgado, R.; Hurford, C.; Lucas, R. Introducing the Book “The Roles of Remote Sensing in Nature Conservation.”. In The Roles of Remote Sensing in Nature Conservation; Springer: Cham, Switzerland, 2017; pp. 3–10. ISBN 978-3-319-64330-4. [Google Scholar]
- Hufkens, K.; Bogaert, J.; Dong, Q.H.; Lu, L.; Huang, C.L.; Ma, M.G.; Che, T.; Li, X.; Veroustraete, F.; Ceulemans, R. Impacts and uncertainties of upscaling of remote-sensing data validation for a semi-arid woodland. J. Arid Environ. 2008, 72, 1490–1505. [Google Scholar] [CrossRef]
- Porcar-Castell, A.; Mac Arthur, A.; Rossini, M.; Eklundh, L.; Pacheco-Labrador, J.; Anderson, K.; Balzarolo, M.; Martín, M.P.; Jin, H.; Tomelleri, E.; et al. EUROSPEC: at the interface between remote-sensing and ecosystem CO2 flux measurements in Europe. Biogeosciences 2015, 12, 6103–6124. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Miller, J.R.; Noland, T.L.; Mohammed, G.H.; Sampson, P.H. Scaling-up and model inversion methods with narrowband optical indices for chlorophyll content estimation in closed forest canopies with hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1491–1507. [Google Scholar] [CrossRef]
- Lucas, R.; Díaz-Delgado, R.; Hurford, C. Expected Advances in a Rapidly Developing Work Area. In The Roles of Remote Sensing in Nature Conservation; Springer: Cham, Switzerland, 2017; pp. 309–318. ISBN 978-3-319-64330-4. [Google Scholar]
- Duan, T.; Chapman, S.C.; Guo, Y.; Zheng, B. Dynamic monitoring of NDVI in wheat agronomy and breeding trials using an unmanned aerial vehicle. Field Crops Res. 2017, 210, 71–80. [Google Scholar] [CrossRef]
- Su, J.; Liu, C.; Coombes, M.; Hu, X.; Wang, C.; Xu, X.; Li, Q.; Guo, L.; Chen, W.-H. Wheat yellow rust monitoring by learning from multispectral UAV aerial imagery. Comput. Electron. Agric. 2018, 155, 157–166. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: a review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.; Miller, P.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Sha, Z.; Wang, Y.; Bai, Y.; Zhao, Y.; Jin, H.; Na, Y.; Meng, X. Comparison of leaf area index inversion for grassland vegetation through remotely sensed spectra by unmanned aerial vehicle and field-based spectroradiometer. J. Plant Ecol. 2018. [Google Scholar] [CrossRef]
- Vanden Borre, J.; Paelinckx, D.; Mücher, C.A.; Kooistra, L.; Haest, B.; De Blust, G.; Schmidt, A.M. Integrating remote sensing in Natura 2000 habitat monitoring: Prospects on the way forward. J. Nat. Conserv. 2011, 19, 116–125. [Google Scholar] [CrossRef]
- Lloret, F.; de la Riva, E.G.; Pérez-Ramos, I.M.; Marañón, T.; Saura-Mas, S.; Díaz-Delgado, R.; Villar, R. Climatic events inducing die-off in Mediterranean shrublands: are species’ responses related to their functional traits? Oecologia 2016, 180, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Ciais, P.; Reichstein, M.; Viovy, N.; Granier, A.; Ogée, J.; Allard, V.; Aubinet, M.; Buchmann, N.; Bernhofer, C.; Carrara, A.; et al. Europe-wide reduction in primary productivity caused by the heat and drought in 2003. Nature 2005, 437, 529–533. [Google Scholar] [CrossRef]
- de la Riva, E.G.; Lloret, F.; Pérez-Ramos, I.M.; Marañón, T.; Saura-Mas, S.; Díaz-Delgado, R.; Villar, R. The importance of functional diversity on the stability of Mediterranean shrubland communities after the impact of extreme climatic events. J. Plant Ecol. 2017, 10, 281–293. [Google Scholar] [CrossRef]
- Kröel-Dulay, G.; Ransijn, J.; Schmidt, I.K.; Beier, C.; De Angelis, P.; de Dato, G.; Dukes, J.S.; Emmett, B.; Estiarte, M.; Garadnai, J.; et al. Increased sensitivity to climate change in disturbed ecosystems. Nat. Commun. 2015, 6, 6682. [Google Scholar] [CrossRef] [PubMed]
- Lellei-Kovács, E.; Kovács-Láng, E.; Kalapos, T.; Botta-Dukát, Z.; Barabás, S.; Beier, C. Experimental warming does not enhance soil respiration in a semiarid temperate forest-steppe ecosystem. Community Ecol. 2008, 9, 29–37. [Google Scholar] [CrossRef]
- Rouse, J.W. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; Texas A&M Univ.; Remote Sensing Center: College Station, TX, USA, 1974. [Google Scholar]
- Ónodi, G.; Kröel-Dulay, G.; Kovács-Láng, E.; Ódor, P.; Botta-Dukat, Z.; Lhotsky, B.; Barabás, S.; Garadnai, J.; Kertész, M. Comparing the accuracy of three non-destructive methods in estimating aboveground plant biomass. Community Ecol. 2017, 18, 56–62. [Google Scholar] [CrossRef]
- Molnár, Z.; Biró, M.; Bartha, S.; Fekete, G. Past Trends, Present State and Future Prospects of Hungarian Forest-Steppes. In Eurasian Steppes. Ecological Problems and Livelihoods in a Changing World; Werger, M.J.A., van Staalduinen, M.A., Eds.; Plant and Vegetation; Springer Netherlands: Dordrecht, The Netherlands, 2012; pp. 209–252. ISBN 978-94-007-3886-7. [Google Scholar]
- Kovács-Láng, E.; Kröel-Dulay, G.; Kertész, M.; Fekete, G.; Bartha, S.; Mika, J.; Dobi-Wantuch, I.; Rédei, T.; Rajkai, K.; Hahn, I. Changes in the composition of sand grasslands along a climatic gradient in Hungary and implications for climate change. Phytocoenologia 2000, 30, 385–407. [Google Scholar] [CrossRef]
- Bartholy, J.; Pongrácz, R. Regional analysis of extreme temperature and precipitation indices for the Carpathian Basin from 1946 to 2001. Glob. Planet. Change 2007, 57, 83–95. [Google Scholar] [CrossRef]
- Beier, C.; Emmett, B.; Gundersen, P.; Tietema, A.; Peñuelas, J.; Estiarte, M.; Gordon, C.; Gorissen, A.; Llorens, L.; Roda, F.; et al. Novel Approaches to Study Climate Change Effects on Terrestrial Ecosystems in the Field: Drought and Passive Nighttime Warming. Ecosystems 2004, 7, 583–597. [Google Scholar] [CrossRef]
- Peñuelas, J.; Prieto, P.; Beier, C.; Cesaraccio, C.; Angelis, P.D.; Dato, G.D.; Emmett, B.A.; Estiarte, M.; Garadnai, J.; Gorissen, A.; et al. Response of plant species richness and primary productivity in shrublands along a north–south gradient in Europe to seven years of experimental warming and drought: reductions in primary productivity in the heat and drought year of 2003. Glob. Change Biol. 2007, 13, 2563–2581. [Google Scholar] [CrossRef]
- Díaz-Delgado, R.; Lloret, F.; Pons, X.; Terradas, J. Satellite Evidence of Decreasing Resilience in Mediterranean Plant Communities After Recurrent Wildfires. Ecology 2002, 83, 2293–2303. [Google Scholar] [CrossRef]
- Haberl, H.; Winiwarter, V.; Andersson, K.; Ayres, R.U.; Boone, C.; Castillo, A.; Cunfer, G.; Fischer-Kowalski, M.; Freudenburg, W.R.; Furman, E.; et al. From LTER to LTSER: Conceptualizing the socioeconomic dimension of long-term socioecological research. Ecol. Soc. 2006, 11, 13. [Google Scholar] [CrossRef]
- Mirtl, M.; Orenstein, D.E.; Wildenberg, M.; Peterseil, J.; Frenzel, M. Development of LTSER Platforms in LTER-Europe: Challenges and Experiences in Implementing Place-Based Long-Term Socio-ecological Research in Selected Regions; Springer Netherlands: Dordrecht, The Netherlands, 2013; ISBN 978-94-007-1176-1. [Google Scholar]
- Dick, J.; Orenstein, D.E.; Holzer, J.; Wohner, C.; Achard, A.-L.; Andrews, C.; Avriel-Avni, N.; Beja, P.; Blond, N.; Cabello, J.; et al. What is socio-ecological research delivering? A literature survey across 25 international LTSER platforms. Sci. Total Environ. 2018, 622–623, 1225–1240. [Google Scholar] [CrossRef]
- Franklin, S.E.; Ahmed, O.S.; Williams, G. Northern Conifer Forest Species Classification Using Multispectral Data Acquired from an Unmanned Aerial Vehicle. Photogramm. Eng. Remote Sens. 2017, 83, 501–507. [Google Scholar] [CrossRef]
- Shen, Y.-Y.; Cattau, M.; Borenstein, S.; Weibel, D.; Frew, E.W. Toward an Architecture for Subalpine Forest Health Monitoring Using Commercial Off-the-Shelf Unmanned Aircraft Systems and Sensors. Proceedings of 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Padró, J.-C.; Carabassa, V.; Balagué, J.; Brotons, L.; Alcañiz, J.M.; Pons, X. Monitoring opencast mine restorations using Unmanned Aerial System (UAS) imagery. Sci. Total Environ. 2019, 657, 1602–1614. [Google Scholar] [CrossRef]
- Hakala, T.; Markelin, L.; Honkavaara, E.; Scott, B.; Theocharous, T.; Nevalainen, O.; Näsi, R.; Suomalainen, J.; Viljanen, N.; Greenwell, C.; et al. Direct Reflectance Measurements from Drones: Sensor Absolute Radiometric Calibration and System Tests for Forest Reflectance Characterization. Sensors 2018, 18, 1417. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, O.S.; Shemrock, A.; Chabot, D.; Dillon, C.; Williams, G.; Wasson, R.; Franklin, S.E. Hierarchical land cover and vegetation classification using multispectral data acquired from an unmanned aerial vehicle. Int. J. Remote Sens. 2017, 38, 2037–2052. [Google Scholar] [CrossRef]
- Unger, J.; Reich, M.; Heipke, C. UAV-based photogrammetry: monitoring of a building zone. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL, 601–606. [Google Scholar] [CrossRef]
- Rasmussen, J.; Ntakos, G.; Nielsen, J.; Svensgaard, J.; Poulsen, R.N.; Christensen, S. Are vegetation indices derived from consumer-grade cameras mounted on UAVs sufficiently reliable for assessing experimental plots? Eur. J. Agron. 2016, 74, 75–92. [Google Scholar] [CrossRef]
- Lu, B.; He, Y.; Liu, H.H.T. Mapping vegetation biophysical and biochemical properties using unmanned aerial vehicles-acquired imagery. Int. J. Remote Sens. 2017, 39, 1–23. [Google Scholar] [CrossRef]
- Levin, N.; Lugassi, R.; Ramon, U.; Braun, O.; Ben-Dor, E. Remote sensing as a tool for monitoring plasticulture in agricultural landscapes. Int. J. Remote Sens. 2007, 28, 183–202. [Google Scholar] [CrossRef]
- Jiménez, M.; Díaz-Delgado, R. Sub-pixel Mapping of Doñana Shrubland Species. In The Roles of Remote Sensing in Nature Conservation; Springer: Cham, Switzerland, 2017; pp. 141–163. ISBN 978-3-319-64330-4. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Characteristics | Multispectral | RGB 4K Camera |
|---|---|---|
| Ground Sampling Distance (cm) | 5. 5 | 1.45 |
| Number of images | 1064 | 135 |
| Absolute RMS error (cm) | 4.8 | 2.5 |
| Scales | All Measurements | Plastic Cover | No Plastic |
|---|---|---|---|
| Point scale | 0.43 | 0.31 | 0.37 |
| FOV scale (circle, 40 cm radius) | 0.46 | 0.41 | 0.65 |
| Plot scale | 0.38 | 0.21 | 0.33 |
| Treatment | Extreme Drought | Moran Index | Shannon Index |
|---|---|---|---|
| Control | No | 0.8522 | 10.3499 |
| Yes | 0.8473 | 10.3530 | |
| Moderate drought | No | 0.9077 | 10.3525 |
| Yes | 0.9043 | 10.3478 | |
| Rain | No | 0.8440 | 10.3417 |
| Yes | 0.8729 | 10.3522 | |
| Severe drought | No | 0.8834 | 10.3462 |
| Yes | 0.9195 | 10.3567 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Díaz-Delgado, R.; Ónodi, G.; Kröel-Dulay, G.; Kertész, M. Enhancement of Ecological Field Experimental Research by Means of UAV Multispectral Sensing. Drones 2019, 3, 7. https://doi.org/10.3390/drones3010007
Díaz-Delgado R, Ónodi G, Kröel-Dulay G, Kertész M. Enhancement of Ecological Field Experimental Research by Means of UAV Multispectral Sensing. Drones. 2019; 3(1):7. https://doi.org/10.3390/drones3010007
Chicago/Turabian StyleDíaz-Delgado, Ricardo, Gábor Ónodi, György Kröel-Dulay, and Miklós Kertész. 2019. "Enhancement of Ecological Field Experimental Research by Means of UAV Multispectral Sensing" Drones 3, no. 1: 7. https://doi.org/10.3390/drones3010007
APA StyleDíaz-Delgado, R., Ónodi, G., Kröel-Dulay, G., & Kertész, M. (2019). Enhancement of Ecological Field Experimental Research by Means of UAV Multispectral Sensing. Drones, 3(1), 7. https://doi.org/10.3390/drones3010007