A Practical Deployment of a Communication Infrastructure to Support the Employment of Multiple Surveillance Drones Systems

 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Background and Related Work
2.1. DroidPlanner and MAVLink in a Nutshell
2.2. Related Work
3. Materials and Methods
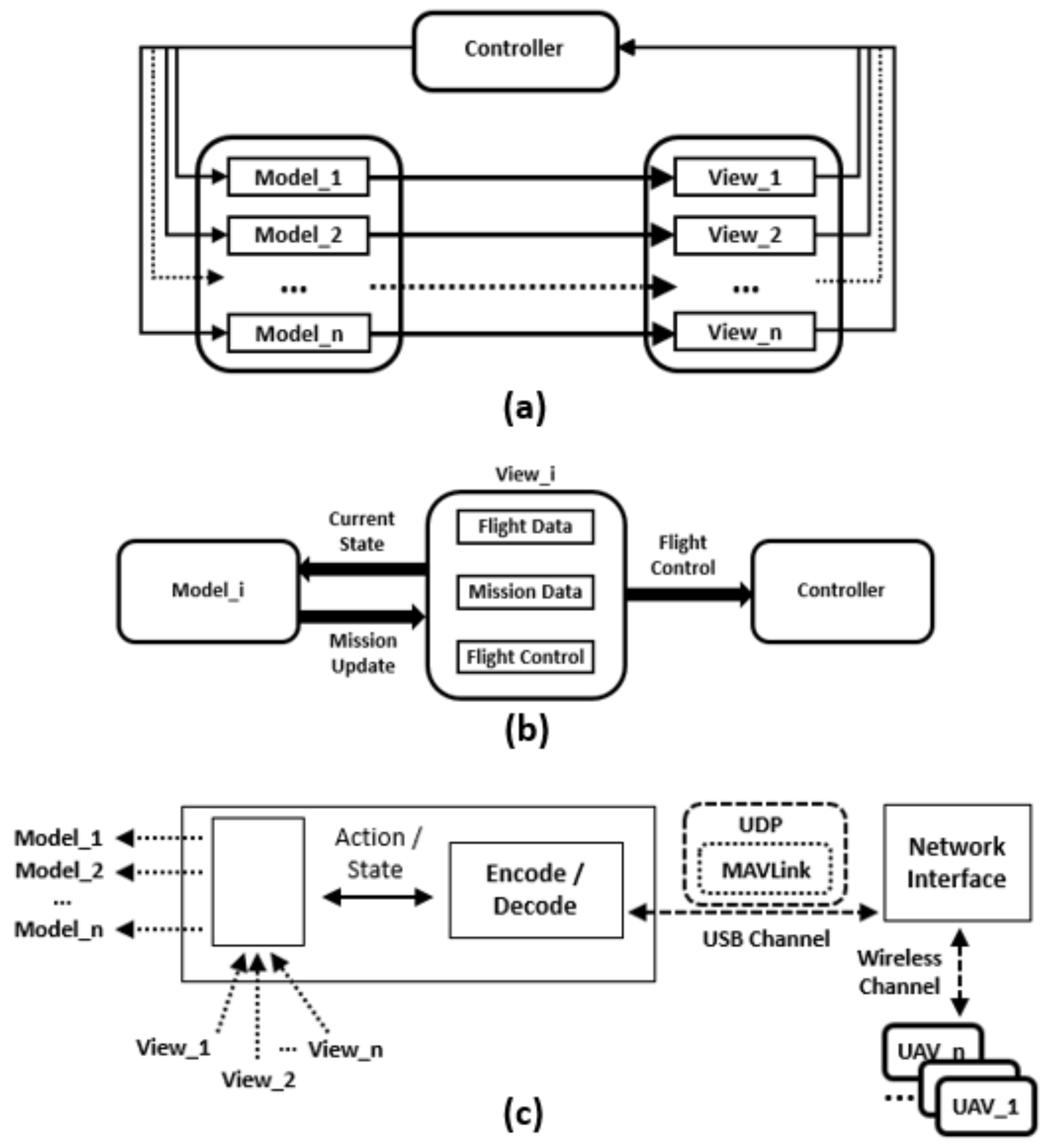
3.1. Multiple Drones Control Station Architecture
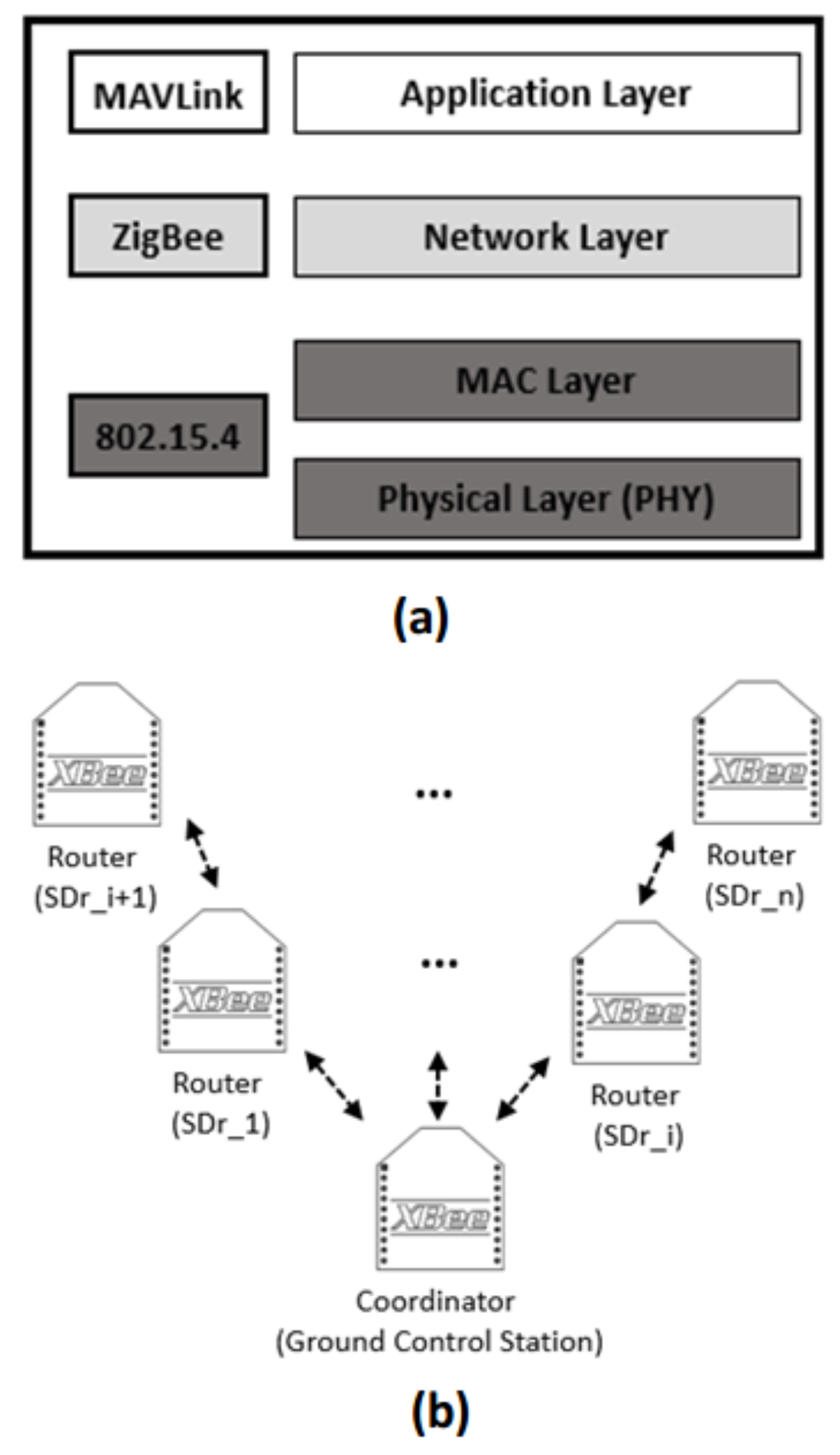
3.2. Communication Infrastructure
3.2.1. Definition of the New MAVLink Message
3.2.2. The Practical Network Implementation
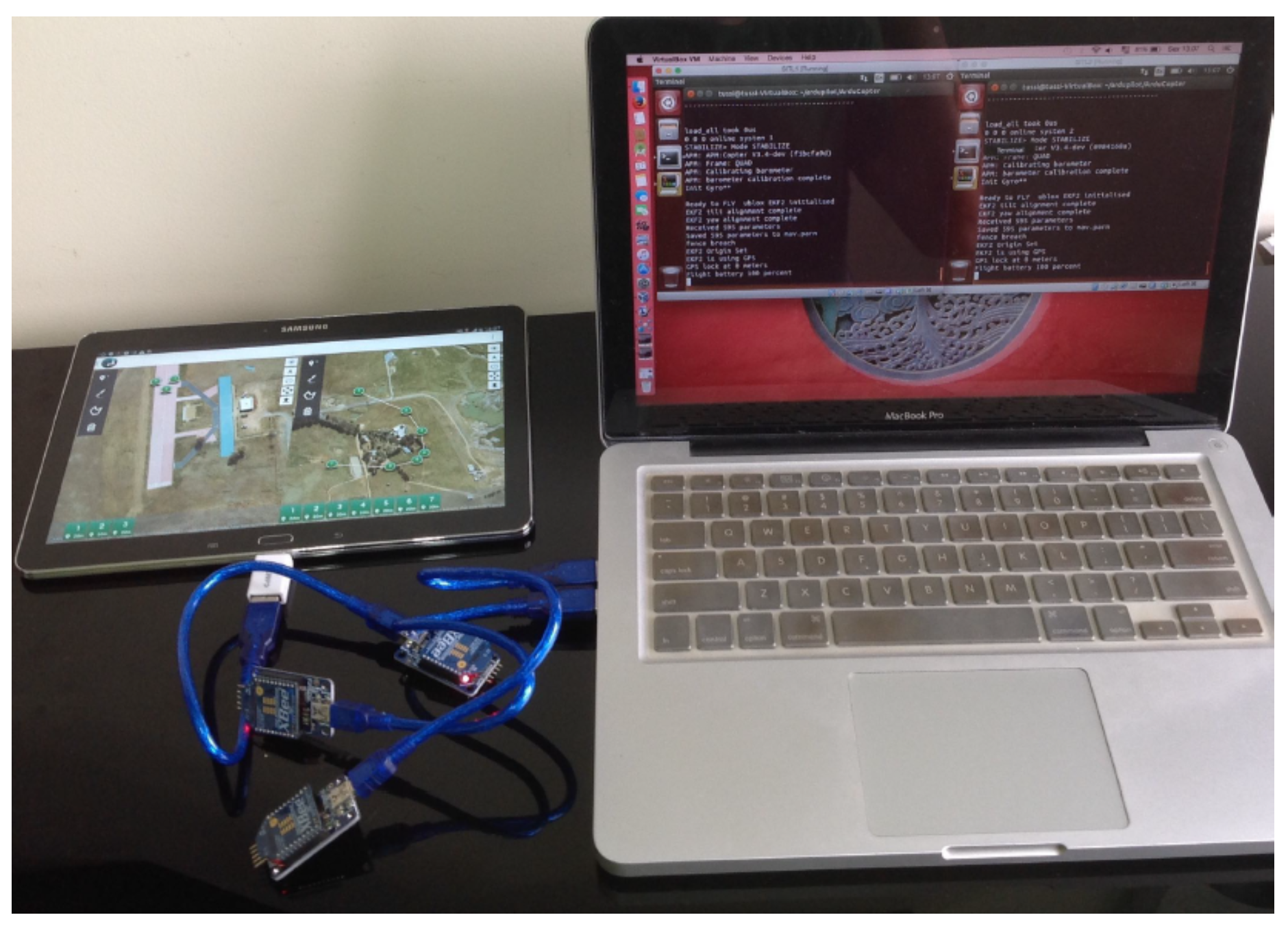
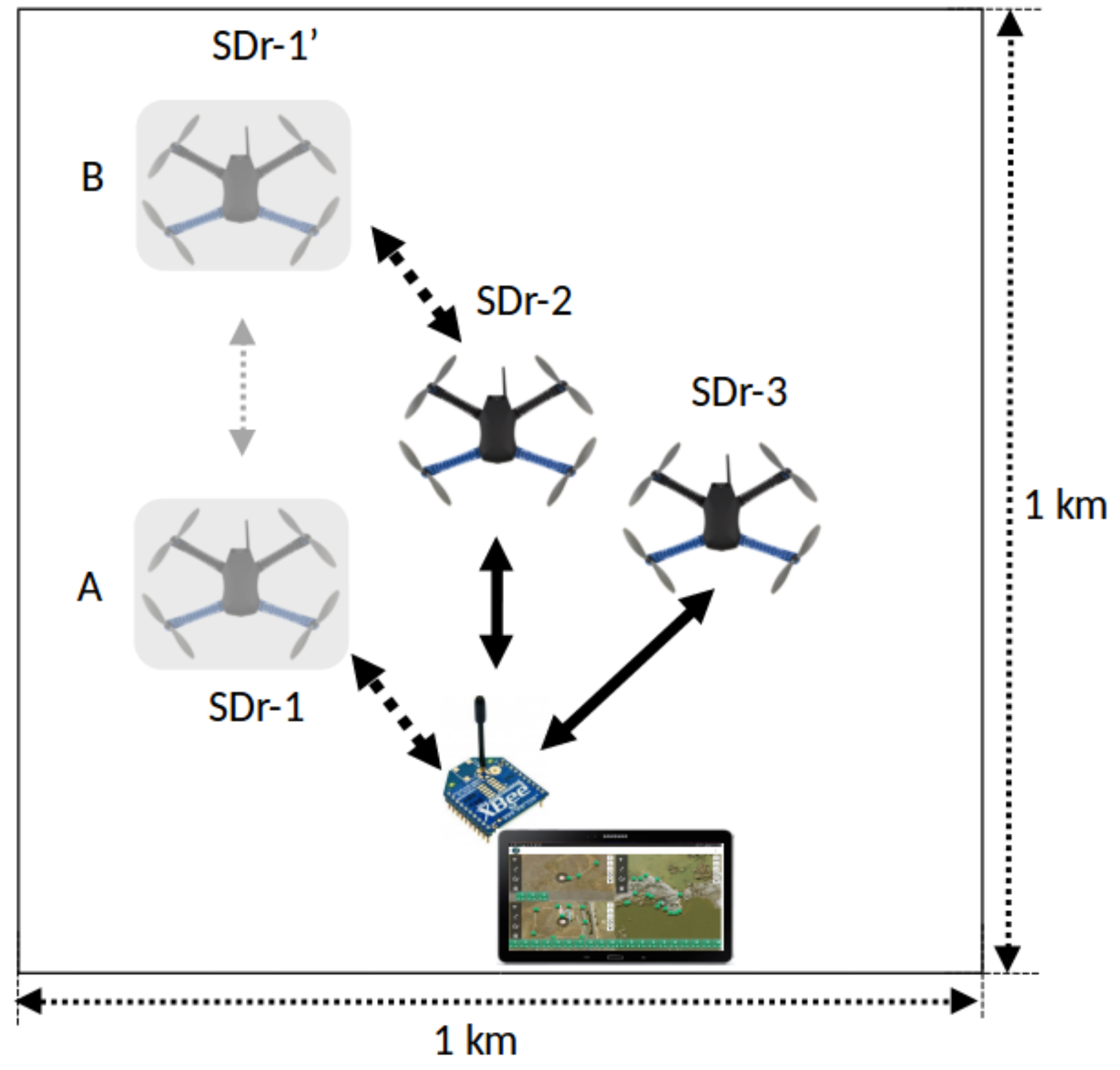
4. Experimental Deployment
4.1. Experiments Setup
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| ADr | amateur drone |
| SDr | surveillance drone |
| GNU | General Public License |
| POI | Point Of Interest |
| MVC | Model-View-Controller |
| UDP | User Datagram Protocol |
| USB | Universal Serial Bus |
| MAVLink | Micro Air Vehicle Link |
| RAM | Random Access Memory |
| MAC | Medium Access Control |
| XML | Extensible Markup Language |
| STIL | Software in the Loop |
| DTLS | Datagram Transport Layer Security |
| MILP | Mixed Integer Linear Programming |
References
- Ping, J.T.K.; Ling, A.E.; Quan, T.J.; Dat, C.Y. Generic unmanned aerial vehicle (UAV) for civilian application-A feasibility assessment and market survey on civilian application for aerial imaging. In Proceedings of the 2012 IEEE Conference on Sustainable Utilization and Development in Engineering and Technology (STUDENT), Semenyih, Malaysia, 20–21 October 2011; pp. 289–294. [Google Scholar]
- BBC. Dubai Airport Grounds Flights Due to ‘Drone Activity’. 2016. Available online: http://www.bbc.com/news/world-middle-east-37493404 (accessed on 12 May 2017).
- Kaleem, Z.; Rehmani, M.H.; Ahmed, E.; Jamalipour, A.; Rodrigues, J.J.P.C.; Moustafa, H.; Guibene, W. Amateur Drone Surveillance: Applications, Architectures, Enabling Technologies, and Public Safety Issues: Part 1. IEEE Commun. Mag. 2018, 56, 14–15. [Google Scholar] [CrossRef]
- Kaleem, Z.; Rehmani, M.H.; Ahmed, E.; Jamalipour, A.; Rodrigues, J.J.P.C.; Moustafa, H.; Guibene, W. Amateur Drone Surveillance: Applications, Architectures, Enabling Technologies, and Public Safety Issues: Part 2. IEEE Commun. Mag. 2018, 56, 66–67. [Google Scholar] [CrossRef]
- Azari, M.M.; Sallouha, H.; Chiumento, A.; Rajendran, S.; Vinogradov, E.; Pollin, S. Key Technologies and System Trade-offs for Detection and Localization of Amateur Drones. IEEE Commun. Mag. 2018, 56, 51–57. [Google Scholar] [CrossRef]
- Kaleem, Z.; Rehmani, M.H. Amateur Drone Monitoring: State-of-the-Art Architectures, Key Enabling Technologies, and Future Research Directions. IEEE Wirel. Commun. 2018, 25, 150–159. [Google Scholar] [CrossRef]
- Luo, C.; Ward, P.; Cameron, S.; Parr, G.; McClean, S. Communication provision for a team of remotely searching UAVs: A mobile relay approach. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1544–1549. [Google Scholar]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Xiao, Z.; Xia, P.; Xia, X. Enabling UAV cellular with millimeter-wave communication: Potentials and approaches. IEEE Commun. Mag. 2016, 54, 66–73. [Google Scholar] [CrossRef]
- Orfanus, D.; de Freitas, E.P.; Eliassen, F. Self-Organization as a Supporting Paradigm for Military UAV Relay Networks. IEEE Commun. Lett. 2016, 20, 804–807. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-Based IoT Platform: A Crowd Surveillance Use Case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef]
- Zacarias, I.; Gaspary, L.P.; Kohl, A.; Fernandes, R.Q.A.; Stocchero, J.M.; de Freitas, E.P. Combining Software-Defined and Delay-Tolerant Approaches in Last-Mile Tactical Edge Networking. IEEE Commun. Mag. 2017, 55, 22–29. [Google Scholar] [CrossRef]
- Meier, L. MAVLink: Micro Air Vehicle Communication Protocol. 2009. Available online: http://qgroundcontrol.org/mavlink/start (accessed on 12 May 2017).
- Benemann, A. DroidPlanner 2. 2014. Available online: https://play.google.com/store/apps/details?id=org.droidplannerhl=pt (accessed on 12 May 2017).
- Park, K.N.; Kang, J.H.; Cho, B.M.; Park, K.J.; Kim, H. Handover Management of Net-Drones for Future Internet Platforms. Int. J. Distrib. Sens. Netw. 2016, 12, 5760245. [Google Scholar] [CrossRef]
- Kim, B.S.; Kim, S.W.; Zhang, C.; Yue, H. A breakthrough in multi-hop wireless multimedia sensor networking protocols. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Ajami, A.; Balmat, J.F.; Gauthier, J.P.; Maillot, T. Path planning and Ground Control Station simulator for UAV. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; pp. 1–13. [Google Scholar]
- Koh, L.; Wich, S.; Wuderlin, S.; Duffy, B.; Kerby, J.; Pang, K. Missionplanner. 2010. Available online: http://conservationdrones.org/mission-planner (accessed on 20 August 2018).
- Song, B.D.; Kim, J.; Kim, J.; Park, H.; Morrison, J.R.; Shim, D.H. Persistent UAV Service: An Improved Scheduling Formulation and Prototypes of System Components. J. Intell. Robot. Syst. 2014, 74, 221–232. [Google Scholar] [CrossRef]
- Trotta, A.; D’Andreagiovanni, F.; di Felice, M.; Natalizio, E.; Chowdhury, K. When UAVs Ride A Bus: Towards Energy-efficient City-scale Video Surveillance. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications, Honolulu, HI, USA, 15–19 April 2018. [Google Scholar]
- Araniti, G.; Bezirgiannidis, N.; Birrane, E.; Bisio, I.; Burleigh, S.; Caini, C.; Feldmann, M.; Marchese, M.; Segui, J.; Suzuki, K. Contact graph routing in DTN space networks: Overview, enhancements and performance. IEEE Commun. Mag. 2015, 53, 38–46. [Google Scholar] [CrossRef]
- ArduPilot Dev Team. Software in the Loop (STIL) ArduPilot Simulator. 2016. Available online: http://ardupilot.org/dev/docs/sitl-simulator-software-in-the-loop.html (accessed on 13 May 2017).





© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Basso, M.; Zacarias, I.; Tussi Leite, C.E.; Wang, H.; Pignaton de Freitas, E. A Practical Deployment of a Communication Infrastructure to Support the Employment of Multiple Surveillance Drones Systems. Drones 2018, 2, 26. https://doi.org/10.3390/drones2030026
Basso M, Zacarias I, Tussi Leite CE, Wang H, Pignaton de Freitas E. A Practical Deployment of a Communication Infrastructure to Support the Employment of Multiple Surveillance Drones Systems. Drones. 2018; 2(3):26. https://doi.org/10.3390/drones2030026
Chicago/Turabian StyleBasso, Maik, Iulisloi Zacarias, Carlos Eduardo Tussi Leite, Haijun Wang, and Edison Pignaton de Freitas. 2018. "A Practical Deployment of a Communication Infrastructure to Support the Employment of Multiple Surveillance Drones Systems" Drones 2, no. 3: 26. https://doi.org/10.3390/drones2030026
APA StyleBasso, M., Zacarias, I., Tussi Leite, C. E., Wang, H., & Pignaton de Freitas, E. (2018). A Practical Deployment of a Communication Infrastructure to Support the Employment of Multiple Surveillance Drones Systems. Drones, 2(3), 26. https://doi.org/10.3390/drones2030026