Accuracy and Optimal Altitude for Physical Habitat Assessment (PHA) of Stream Environments Using Unmanned Aerial Vehicles (UAV)


Abstract
:1. Introduction
2. Materials and Methods
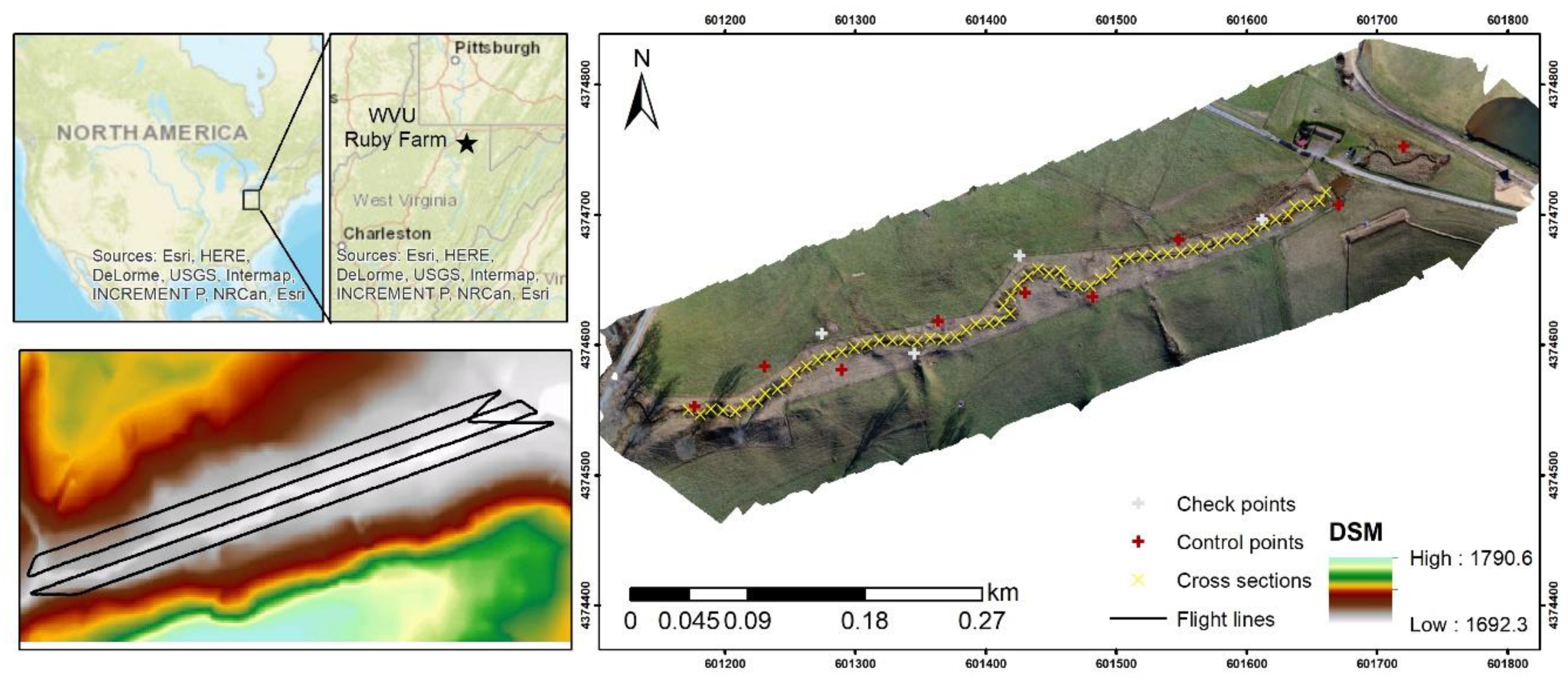
2.1. Study Area and Experimental Design
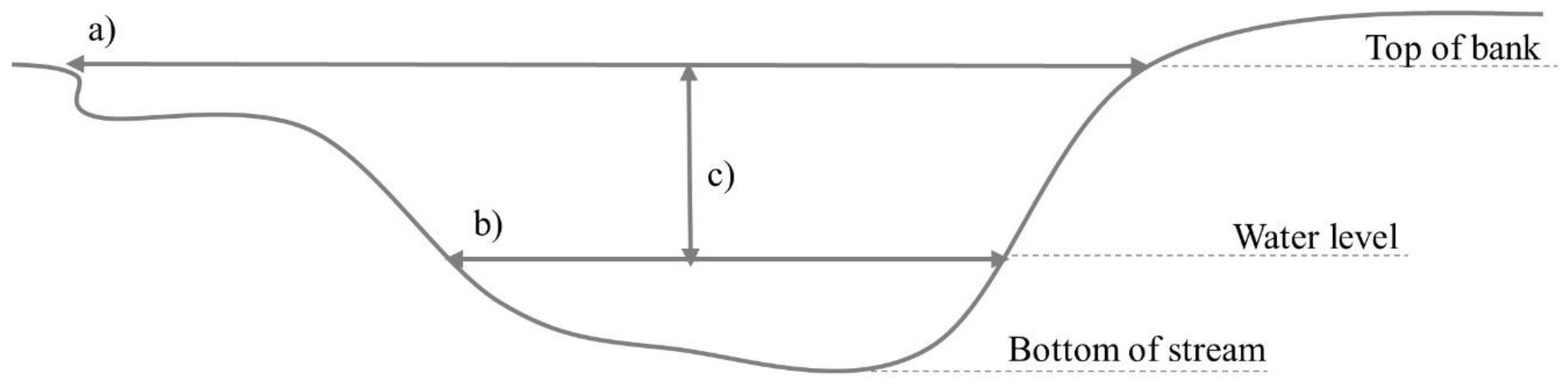
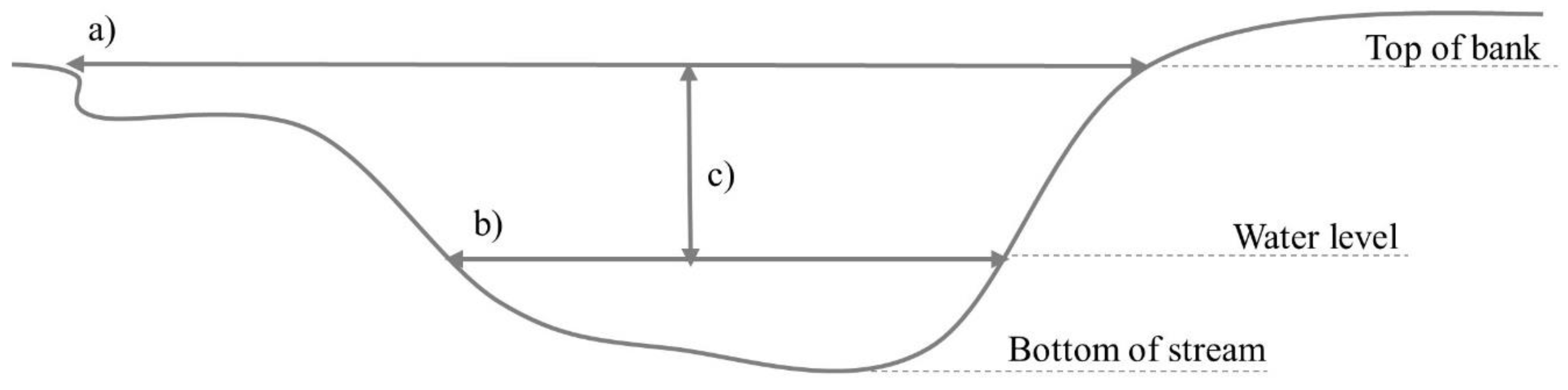
2.2. PHA Field Measurements
2.3. UAV Data Collection and Processing
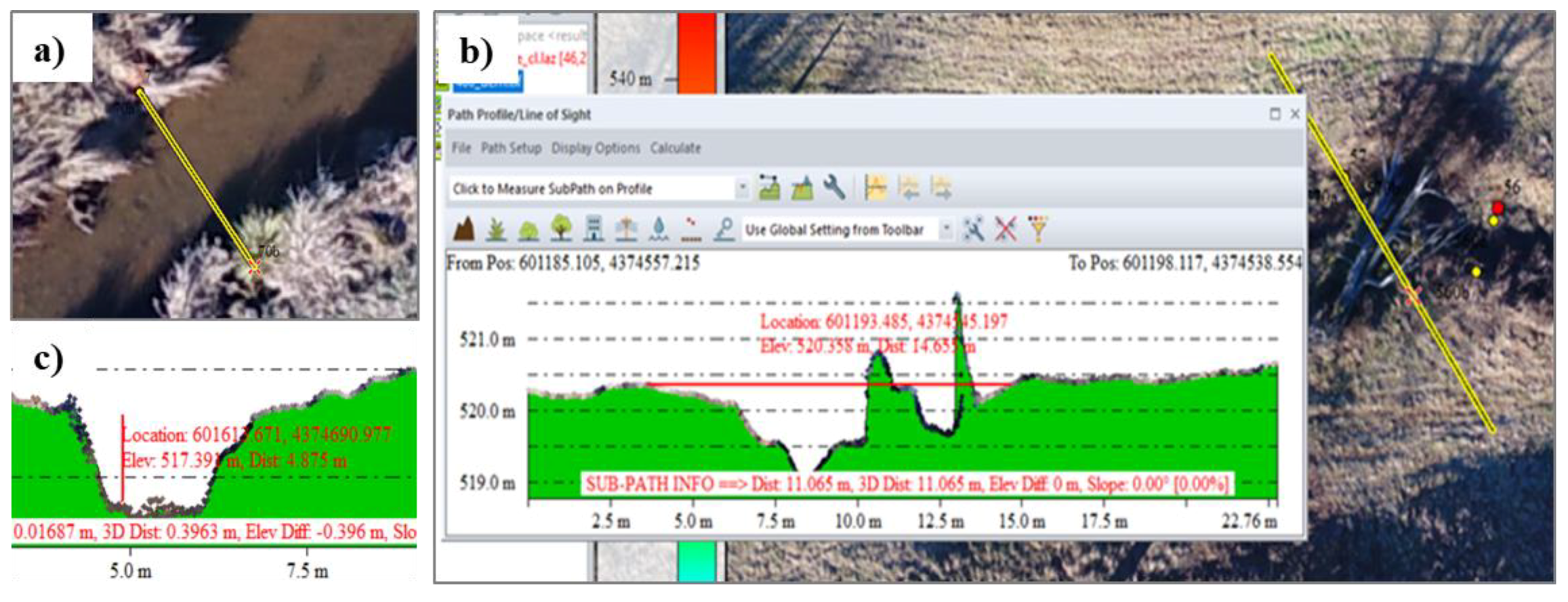
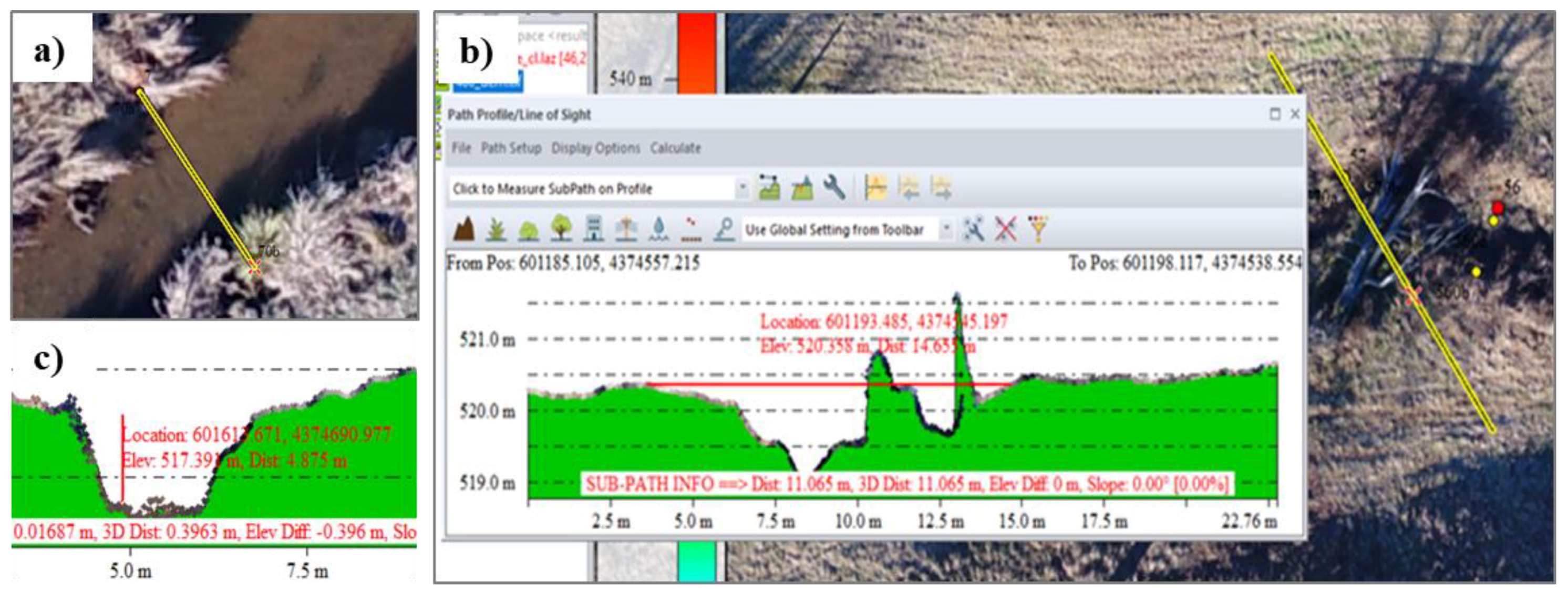
2.4. UAV PHA Measurements
2.5. Statistical Analysis
3. Results
3.1. UAV Products
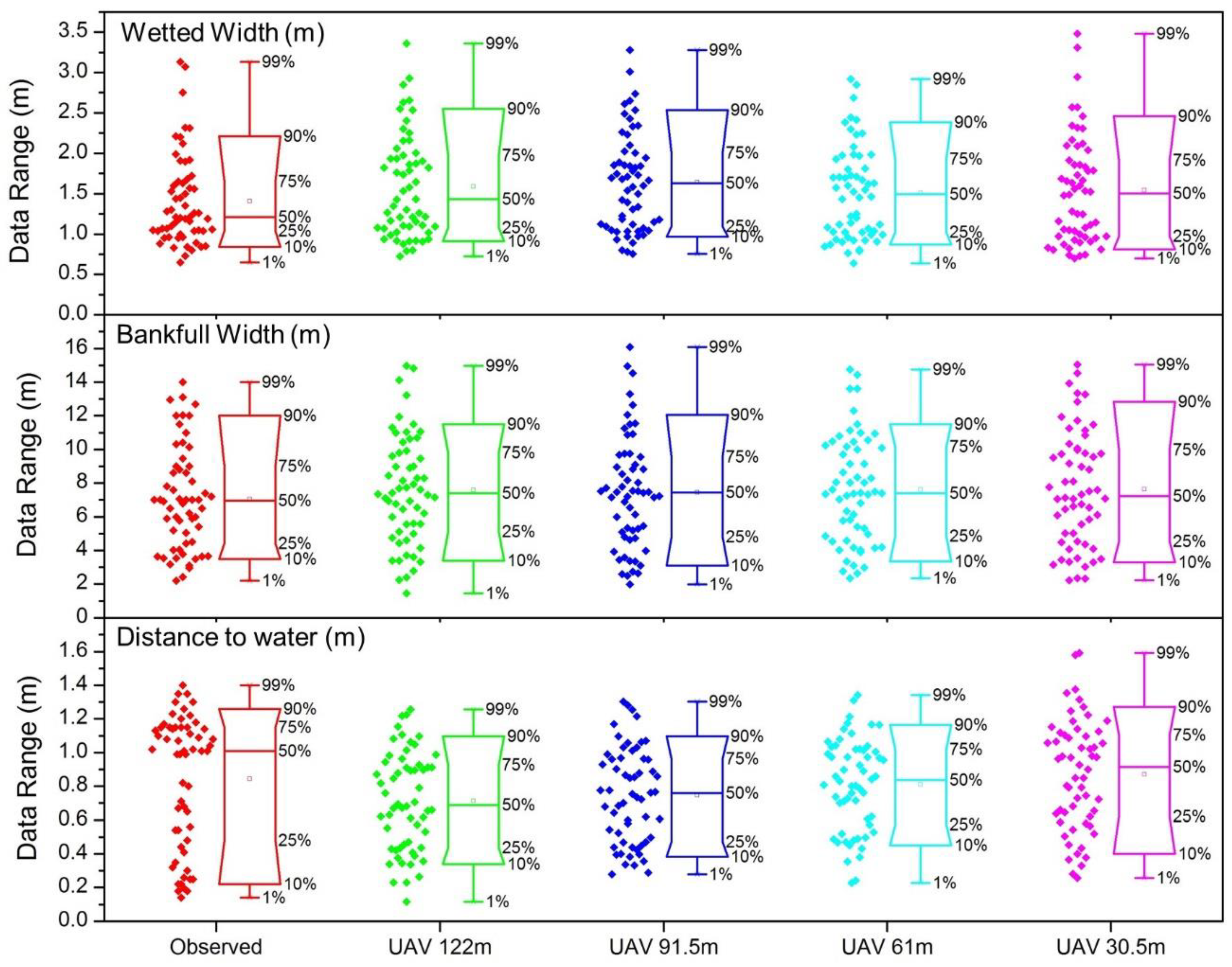
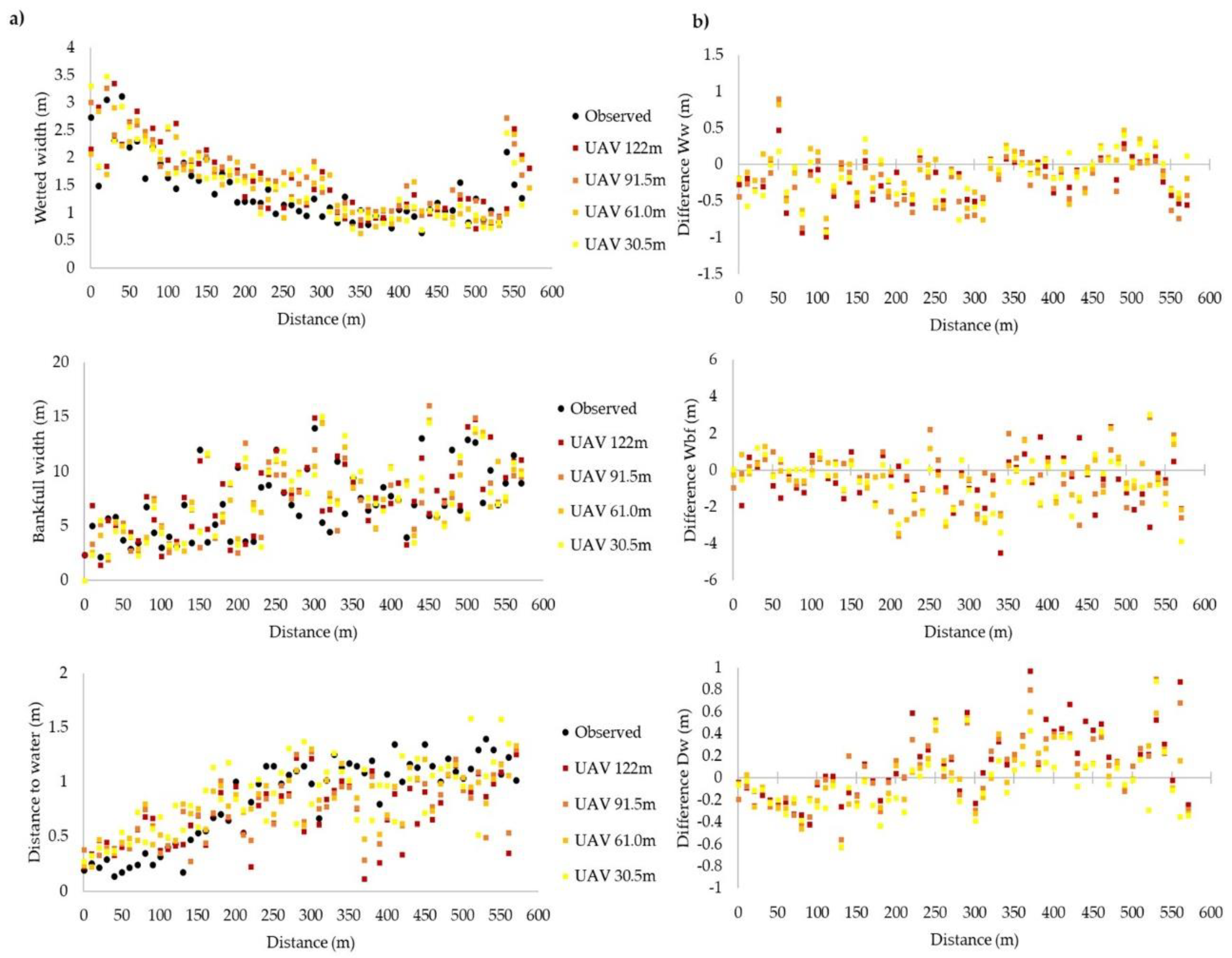
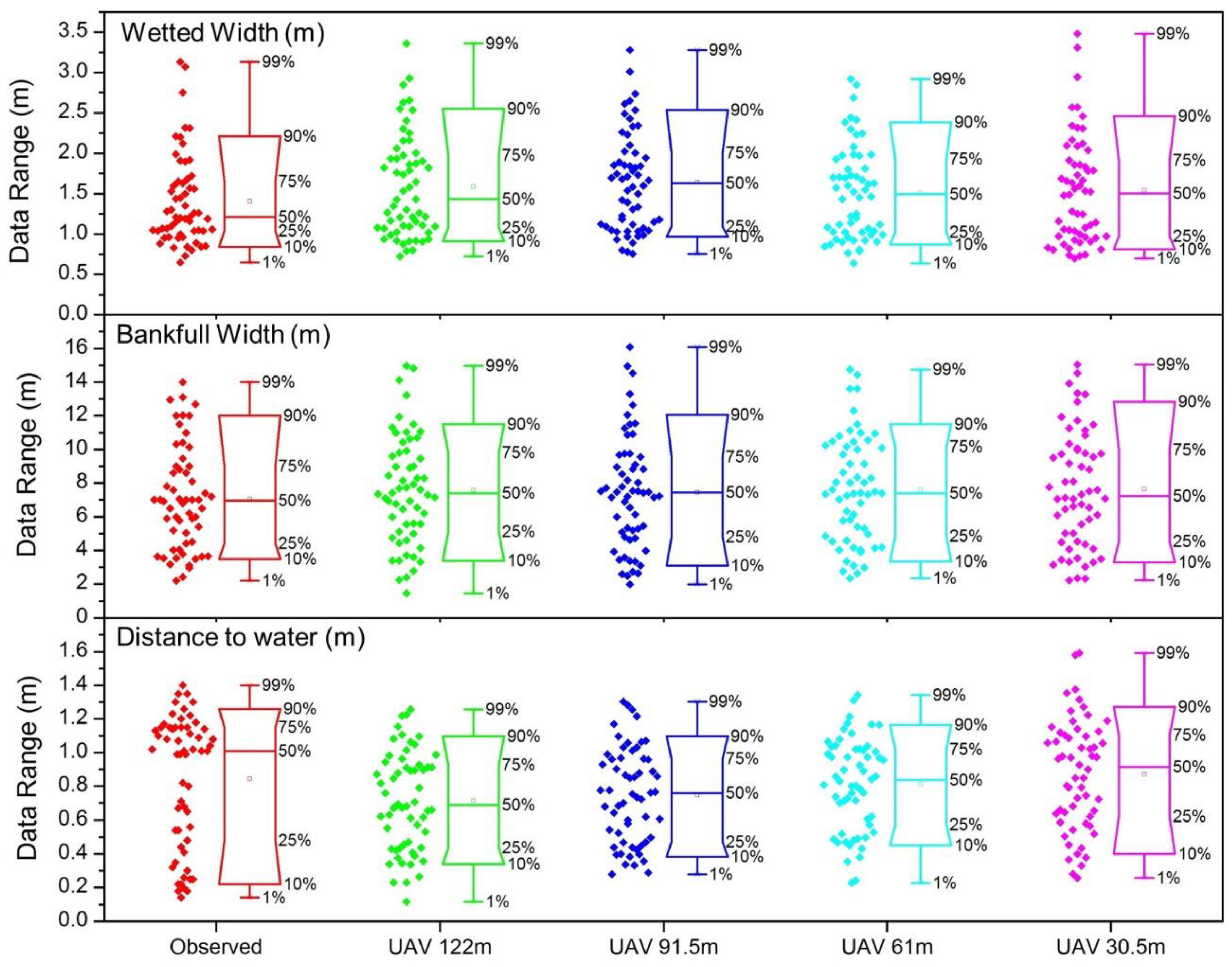
3.2. Observed and UAV Data Description
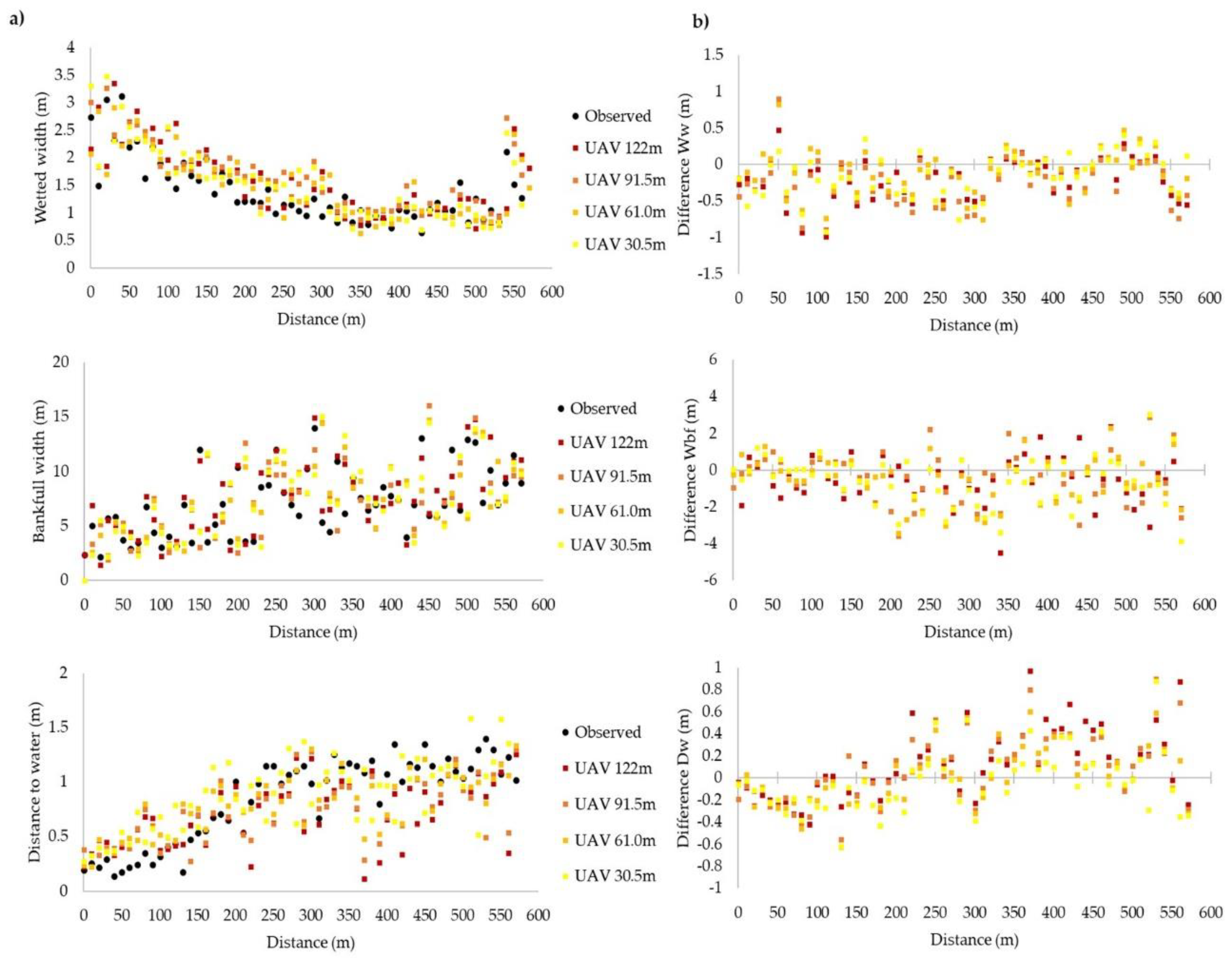
3.3. Statistical Comparison
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Maddock, I. The importance of physical habitat assessment for evaluating river health. Freshw. Biol. 1999, 41, 373–391. [Google Scholar] [CrossRef]
- Violin, C.R.; Cada, P.; Sudduth, E.B.; Hassett, B.A.; Penrose, D.L.; Bernhardt, E.S. Effects of urbanization and urban stream restoration on the physical and biological structure of stream ecosystems. Ecol. Appl. 2011, 21, 1932–1949. [Google Scholar] [CrossRef] [PubMed]
- Davis, N.M.; Weaver, V.; Parks, K.; Lydy, M.J. An assessment of water quality, physical habitat, and biological integrity of an urban stream in Wichita, Kansas, prior to restoration improvements (Phase I). Arch. Environ. Contam. Toxicol. 2003, 44, 351–359. [Google Scholar] [CrossRef] [PubMed]
- Hooper, L.; Hubbart, J. A Rapid Physical Habitat Assessment of Wadeable Streams for Mixed-Land-Use Watersheds. Hydrology 2016, 3, 37. [Google Scholar] [CrossRef]
- Hubbart, J.; Kellner, E.; Kinder, P.; Stephan, K. Challenges in Aquatic Physical Habitat Assessment: Improving Conservation and Restoration Decisions for Contemporary Watersheds. Challenges 2017, 8, 31. [Google Scholar] [CrossRef]
- Peck, D.V.; Herlihy, A.T.; Hill, B.H.; Hughes, R.M.; Kaufmann, P.R.; Klemm, D.J.; Lazorchak, J.M.; McCormick, F.H.; Peterson, S.A.; Ringold, P.L.; et al. (Eds.) Environmental Monitoring and Assessment Program—Surface Waters Western Pilot Study: Field Operations Manual for Wadeable Streams; EPA/620/R-06/003; U.S. Environmental Protection Agency: Washington, DC, USA, 2006; 248p.
- Kaufmann, P.R. Physical Habitat. In Stream Indicator and Design Workshop; Hughes, R.M., Ed.; U.S. Environmental Protection Agency: Corvalis, OR, USA, 1993; pp. 59–69. [Google Scholar]
- Elliot, C.R.N.; Dunbar, M.J.; Gowing, I.; Acreman, M.C. A habitat assessment approach to the management of groundwater dominated rivers. Hydrol. Process. 1999, 13, 459–475. [Google Scholar] [CrossRef]
- Harding, J.; Clapcott, J.; Quinn, J.; Hayes, J.; Joy, M.; Storey, R.; Greig, H.; Hay, J.; James, T.; Beech, M.; et al. Stream Habitat Assessment Protocols for Wadeable Rivers and Streams of New Zealand; School of Biological Sciences, University of Canterbury: Christchurch, New Zealand, 2009; ISBN 9780473151515. [Google Scholar]
- Thomson, J.R.; Taylor, M.P.; Fryirs, K.A.; Brierley, G.J. A geomorphological framework for ri7er characterization and habitat assessment. Aquat. Conserv. Mar. Freshw. Ecosyst. 2001, 11, 373–389. [Google Scholar] [CrossRef]
- Acreman, M.C.; Booker, D.J.; Goodwin, T.H.; Dunbar, M.J.; Maddock, I.; Hardy, T.; Rivas-Casado, M.; Young, A.; Gowing, I.M. Rapid Assessment of Physical Habitat Sensitivity to Abstraction (RAPHSA); Environment Agency: Bristol, UK; Center for Ecology and Hydrology: Oxfordshire, UK, 2008; ISBN 9781844328987.
- Hall, R.K.; Watkins, R.L.; Heggem, D.T.; Jones, K.B.; Kaufmann, P.R.; Moore, S.B.; Gregory, S.J. Quantifying structural physical habitat attributes using LIDAR and hyperspectral imagery. Environ. Monit. Assess. 2009, 159, 63–83. [Google Scholar] [CrossRef] [PubMed]
- Tamminga, A.; Hugenholtz, C.; Eaton, B.; Lapointe, M. Hyperspatial Remote Sensing of Channel Reach Morphology and Hydraulic Fish Habitat Using an Unmanned Aerial Vehicle (UAV): A First Assessment in the Context of River Research and Management. River Res. Appl. 2015, 31, 379–391. [Google Scholar] [CrossRef]
- Woodget, A.S.; Carbonneau, P.E.; Visser, F.; Maddock, I.P. Quantifying submerged fluvial topography using hyperspatial resolution UAS imagery and structure from motion photogrammetry. Earth Surf. Process. Landf. 2015, 40, 47–64. [Google Scholar] [CrossRef]
- Lee, T.M.; Yeh, H.C. Applying remote sensing techniques to monitor shifting wetland vegetation: A case study of Danshui River estuary mangrove communities, Taiwan. Ecol. Eng. 2009, 35, 487–496. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Perschbacher, J. The Use of Aerial Imagery to Map In-Stream Physical Habitat Related to Summer Distribution of Juvenile Salmonids in a Southcentral Alaskan Stream. Master’s Thesis, University of Alaska Fairbanks, Fairbanks, AK, USA, 2011. [Google Scholar]
- Marcus, W.A.; Legleiter, C.J.; Aspinall, R.J.; Boardman, J.W.; Crabtree, R.L. High spatial resolution hyperspectral mapping of in-stream habitats, depths, and woody debris in mountain streams. Geomorphology 2003, 55, 363–380. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Marcus, W.A. Remote sensing of stream depths with hydraulically assisted bathymetry (HAB) models. Geomorphology 2005, 72, 320–339. [Google Scholar] [CrossRef]
- Faux, R.N.; Buffington, J.M.; Whitley, M.G.; Lanigan, S.H.; Roper, B.B. Use of airborne near-infrared LiDAR for determining channel cross-section characteristics and monitoring aquatic habitat in Pacific Northwest rivers: A preliminary Analysis. In PNAMP Special Publication: Remote Sensing Applications for Aquatic Resource Monitoring; Bayer, J.M., Schei, J.L., Eds.; Pacific Northwest Aquatic Monitoring Partnership: Cook, WA, USA, 2009; pp. 43–60. [Google Scholar]
- Dietrich, J.T. Riverscape mapping with helicopter-based Structure-from-Motion photogrammetry. Geomorphology 2016, 252, 144–157. [Google Scholar] [CrossRef]
- Marcus, W.A. Remote sensing of the hydraulic environment in gravel bed rivers. In Gravel-Bed Rivers: Processes, Tools, Environments; Church, M., Biron, P.M., Roy, A.G., Eds.; John Wiley & Sons, Ltd.: Chichester, West Sussex, UK, 2010; pp. 261–285. [Google Scholar]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Koutsoudis, A.; Vidmar, B.; Arnaoutoglou, F. Performance evaluation of a multi-image 3D reconstruction software on a low-feature artefact. J. Archaeol. Sci. 2013, 40, 4450–4456. [Google Scholar] [CrossRef]
- Lisein, J.; Michez, A.; Claessens, H.; Lejeune, P. Discrimination of deciduous tree species from time series of unmanned aerial system imagery. PLoS ONE 2015, 10, e0141006. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Salamí, E.; Barrado, C.; Pastor, E. UAV flight experiments applied to the remote sensing of vegetated areas. Remote Sens. 2014, 6, 11051–11081. [Google Scholar] [CrossRef] [Green Version]
- Quan, L. Image Based Modeling; Springer: New York, NY, USA, 2010; ISBN 9781441966780. [Google Scholar]
- Verhoeven, G. Taking computer vision aloft—Archaeological three-dimensional reconstructions from aerial photographs with photoscan. Archaeol. Prospect. 2011, 62, 61–62. [Google Scholar] [CrossRef]
- Fisher, R.B.; Breckon, T.P.; Dawson-Howe, K.; Fitzgibbon, A.; Robertson, C.; Trucco, E.; Williams, C.K.I. Dictionary of Computer Vision and Image Processing, 2nd ed.; John Wiley & Sons Ltd.: Chichester, West Sussex, UK, 2014. [Google Scholar]
- Szeliski, R. Structure from Motion. In Computer Vision Algorithms and Applications; Szeliski, R., Ed.; Springer: London, UK, 2011; pp. 303–334. [Google Scholar]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Raczynski, R.J. Accuracy Analysis of Products Obtained from UAV-Borne Photogrammetry Influenced by Various Flight Parameters. Master Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2017. [Google Scholar]
- Husson, E.; Hagner, O.; Ecke, F. Unmanned aircraft systems help to map aquatic vegetation. Appl. Veg. Sci. 2014, 17, 567–577. [Google Scholar] [CrossRef]
- Lehmann, J.R.K.; Nieberding, F.; Prinz, T.; Knoth, C. Analysis of unmanned aerial system-based CIR images in forestry-a new perspective to monitor pest infestation levels. Forests 2015, 6, 594–612. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Lucieer, A.; Malenovsky, Z.; Turner, D.; Vopenka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision uav estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Carvajal-Ramírez, F.; Agüera-Vega, F.; Martínez-Carricondo, P.J. Effects of image orientation and ground control points distribution on unmanned aerial vehicle photogrammetry projects on a road cut slope. J. Appl. Remote Sens. 2016, 10, 34004. [Google Scholar] [CrossRef]
- West Virginia GIS Technical Center (WVGISTC). Digital Elevation Models (USGS 3-Meter). 2003. Available online: http://wvgis.wvu.edu/data/dataset.php?ID=261 (accessed on 12 March 2018).
- Hooper, L. A Stream Physical Habitat Assessment in an Urbanizing Watershed of the Central U.S.A. Master’s Thesis, University of Missouri-Columbia, Columbia, MO, USA, 2015. [Google Scholar]
- Pix4D Designing the Image Acquisition Plan. Available online: https://support.pix4d.com/hc/en-us/articles/202557459 (accessed on 12 March 2018).
- Röder, M.; Hill, S.; Latifi, H. Best Practice Tutorial: Technical Handling of the UAV “DJI Phantom 3 Professional” and Processing of the Acquired Data; Technical Report; University of Würzburg: Würzburg, Germany, 2017. [Google Scholar]
- DJI Phantom 4 Specs. Available online: https://www.dji.com/phantom-4/info (accessed on 12 March 2018).
- Küng, O.; Strecha, C.; Beyeler, A.; Zufferey, J.-C.; Floreano, D.; Fua, P.; Gervaix, F. the Accuracy of Automatic Photogrammetric Techniques on Ultra-Light UAV Imagery. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, XXXVIII-1, 125–130. [Google Scholar] [CrossRef]
- Sona, G.; Pinto, L.; Pagliari, D.; Passoni, D.; Gini, R. Experimental analysis of different software packages for orientation and digital surface modelling from UAV images. Earth Sci. Inform. 2014, 7, 97–107. [Google Scholar] [CrossRef]
- Jaud, M.; Passot, S.; Le Bivic, R.; Delacourt, C.; Grandjean, P.; Le Dantec, N. Assessing the accuracy of high resolution digital surface models computed by PhotoScan and MicMac in sub-optimal survey conditions. Remote Sens. 2016, 8. [Google Scholar] [CrossRef]
- Niedzielski, T.; Witek, M.; Spallek, W. Observing river stages using unmanned aerial vehicles. Hydrol. Earth Syst. Sci. 2016, 20, 3193–3205. [Google Scholar] [CrossRef]
- Hauke, J.; Kossowski, T. Comparison of values of pearson’s and spearman’s correlation coefficients on the same sets of data. Quaest. Geogr. 2011, 30, 87–93. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2016. [Google Scholar]
- Savicky, P. pspearman: Spearman’s Rank Correlation Test. 2014. Available online: https://cran.r-project.org/web/packages/pspearman/pspearman.pdf (accessed on 12 March 2018).
- Chao, H.; Chen, Y. Remote Sensing and Actuation Using Unmanned Vehicles; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2012; ISBN 9781118377178. [Google Scholar]
- Mesas-Carrascosa, F.J.; García, M.D.N.; De Larriva, J.E.M.; García-Ferrer, A. An analysis of the influence of flight parameters in the generation of unmanned aerial vehicle (UAV) orthomosaicks to survey archaeological areas. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Westaway, R.M.; Lane, S.N.; Hicks, D.M. Remote survey of large-scale braided, gravel-bed rivers using digital photogrammetry and image analysis. Int. J. Remote Sens. 2003, 24, 795–815. [Google Scholar] [CrossRef]
- Bird, S.; Hogan, D.; Schwab, J. Photogrammetric monitoring of small streams under a riparian forest canopy. Earth Surf. Process. Landf. 2010, 35, 952–970. [Google Scholar] [CrossRef]
- Casado, M.R.; Gonzalez, R.B.; Kriechbaumer, T.; Veal, A. Automated identification of river hydromorphological features using UAV high resolution aerial imagery. Sensors 2015, 15, 27969–27989. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-based photogrammetry and hyperspectral imaging for mapping bark beetle damage at tree-level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry-merits, limits and developments. Earth Surf. Dyn. 2016, 4, 359–389. [Google Scholar] [CrossRef]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Altitude (m) | Pictures (n) | Area (km2) 1 | Resolution (cm/pix) | Density (points/m2) | Time (h:m) 2 | ||
|---|---|---|---|---|---|---|---|
| Ortho | DSM | Processing | Flight | ||||
| 122.0 | 100 | 0.156 | 3.13 | 6.25 | 256 | 4:01 | 0:16 |
| 91.5 | 158 | 0.125 | 2.31 | 4.62 | 468 | 7:01 | 0:20 |
| 61.0 | 364 | 0.0996 | 1.54 | 3.08 | 105,000 | 16:22 | 0:31 |
| 30.5 | 828 | 0.0587 | 0.786 | 1.57 | 404,000 | 33:15 | 1:07 |
| Flight Altitude (m) | X (cm) | Y (cm) | Z (cm) | Absolute Error (cm) |
|---|---|---|---|---|
| 122.0 | 2.12 | 0.43 | 2.49 | 3.30 |
| 91.5 | 1.67 | 1.01 | 1.98 | 2.78 |
| 61.0 | 1.94 | 1.00 | 3.08 | 3.77 |
| 30.5 | 1.05 | 1.41 | 2.97 | 3.45 |
| Statistic | Observed | UAV 122.0 m | UAV 91.5 m | UAV 61.0 m | UAV 30.5 m |
|---|---|---|---|---|---|
| Wetted Width (m) | |||||
| Mean | 1.41 | 1.59 | 1.64 | 1.51 | 1.54 |
| Maximum | 3.13 | 3.36 | 3.28 | 2.92 | 3.48 |
| Minimum | 0.65 | 0.73 | 0.76 | 0.64 | 0.70 |
| Median | 1.21 | 1.43 | 1.63 | 1.49 | 1.50 |
| SD | 0.56 | 0.63 | 0.61 | 0.58 | 0.67 |
| Bankfull Width (m) | |||||
| Mean | 7.07 | 7.58 | 7.43 | 7.62 | 7.65 |
| Maximum | 14.00 | 14.97 | 16.08 | 14.75 | 15.05 |
| Minimum | 2.20 | 1.46 | 1.98 | 2.35 | 2.22 |
| Median | 6.96 | 7.39 | 7.44 | 7.40 | 7.23 |
| SD | 3.08 | 3.22 | 3.37 | 3.19 | 3.42 |
| Distance to Water (m) | |||||
| Mean | 0.84 | 0.71 | 0.75 | 0.81 | 0.87 |
| Maximum | 1.40 | 1.26 | 1.30 | 1.34 | 1.59 |
| Minimum | 0.14 | 0.12 | 0.28 | 0.23 | 0.26 |
| Median | 1.01 | 0.69 | 0.76 | 0.84 | 0.91 |
| SD | 0.39 | 0.29 | 0.28 | 0.27 | 0.33 |
| Value 1 | Value 2 | RMSE (m) | RMSE (%) | SCC |
|---|---|---|---|---|
| Wetted Width | ||||
| Observed | UAV 122.0 m | 0.34 | 7.99 | 0.90 * |
| Observed | UAV 90.5 m | 0.39 | 10.79 | 0.88 * |
| Observed | UAV 61.0 m | 0.32 | 7.09 | 0.85 * |
| Observed | UAV 30.5 m | 0.32 | 7.29 | 0.87 * |
| Bankfull Width | ||||
| Observed | UAV 122.0 m | 1.33 | 25.01 | 0.92 * |
| Observed | UAV 90.5 m | 1.38 | 26.83 | 0.91 * |
| Observed | UAV 61.0 m | 1.33 | 25.00 | 0.93 * |
| Observed | UAV 30.5 m | 1.42 | 28.70 | 0.93 * |
| Distance to water | ||||
| Observed | UAV 122.0 m | 0.34 | 13.35 | 0.59 * |
| Observed | UAV 90.5 m | 0.31 | 11.54 | 0.62 * |
| Observed | UAV 61.0 m | 0.27 | 8.37 | 0.67 * |
| Observed | UAV 30.5 m | 0.27 | 8.61 | 0.66 * |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Klein Hentz, Â.M.; Kinder, P.J.; Hubbart, J.A.; Kellner, E. Accuracy and Optimal Altitude for Physical Habitat Assessment (PHA) of Stream Environments Using Unmanned Aerial Vehicles (UAV). Drones 2018, 2, 20. https://doi.org/10.3390/drones2020020
Klein Hentz ÂM, Kinder PJ, Hubbart JA, Kellner E. Accuracy and Optimal Altitude for Physical Habitat Assessment (PHA) of Stream Environments Using Unmanned Aerial Vehicles (UAV). Drones. 2018; 2(2):20. https://doi.org/10.3390/drones2020020
Chicago/Turabian StyleKlein Hentz, Ângela Maria, Paul J. Kinder, Jason A. Hubbart, and Elliott Kellner. 2018. "Accuracy and Optimal Altitude for Physical Habitat Assessment (PHA) of Stream Environments Using Unmanned Aerial Vehicles (UAV)" Drones 2, no. 2: 20. https://doi.org/10.3390/drones2020020