Abstract
Archery is a quasi-static sport. Nevertheless, it requires maximum concentration, as well as precision from the archer. Previous research used combinations of several sensors, video analysis and electromyography to analyse the motion sequence and to identify parameters leading to a worse score. Therefore, the aim of this study is to verify if solely an acceleration sensor on the archer’s hand, without complex data processing, could be used to set up a feedback system. For testing, six participants with a three dimensional acceleration sensor on each hand shot indoors at a vertical triple target. The parameters analysed were the duration of the movement, the range of motion and the coefficient of variation. The results indicate that the analysis of the coefficient of variation shows no correlation with the score reached, whereas the analysis of the duration and the range of motion does.
1. Introduction
Archery is a highly complex sport. Therefore, exact subdivisions of the individual movement phases and precise descriptions of what should take place in which phase exist. After the bow has been taken, the shooter steps to the shooting line and the first phase (stance) begins, in which one should concentrate. After loading and nocking an arrow, the bow is lifted and the anchoring phase starts. From this point on, the position of the fingers on the string, every movement of the arm, every muscle activity and every breath can influence the trajectory of the arrow, and thus also the score [1,2,3]. As even the smallest factor can have a big impact, many studies have been carried out to analyse various biomechanical parameters (e.g., movement, force, velocity, muscle activities) and, in the best case, point out correlations between these parameters and the score reached [4,5,6,7].
In addition to biomechanical studies, there have been attempts to use the data of sensors for training and feedback systems to support the archer to reach a high score, or at least give feedback as to why no high score could be reached. For example, in a study, a laser distance sensor to capture the location of the target, a flex sensor to measure the drawback force and a smartphone to measure the angle of the bow were used. Out of this data, the trajectory of the arrow was calculated, and the archer got feedback via the smartphone, if the target was hit [8].
To reduce the amount of sensors that have to be used for a feedback system, as well as the time needed for data processing, the aim of this study was to find out if the unfiltered data of an acceleration sensor on each of the archer’s hands could be used for a feedback system. Furthermore, as a previous study found out that a human’s decision time is approximately 200 ms [9], another research question for this study came up: is it possible to find correlations between the score and any of the measured parameters (e.g., range of motion, standard deviation)?
2. Materials and Methods
2.1. Sensor
For this study, a three-dimensional acceleration sensor (MMA7341LC, Freescale Semiconductor Inc., Austin, TX, USA) with a measurement range of +/−3 g was attached to each hand of the participants using medical double-sided adhesive tape. In addition, the sensor was further fixed with tape on top. The sensor was positioned so that the origin of the sensor was at the level of the phalanx proximalis of the digitus manus III and the y-axis pointed in the direction of the digitus manus III (Figure 1). Data of all axes was digitized using the data acquisition card NI USB-6008 (input range: +/−10 VDC; single-ended; National Instruments Corporation, Austin, TX, USA) at a sampling frequency of 1000 Hz, and stored with a LabVIEW routine (National Instruments Corporation).
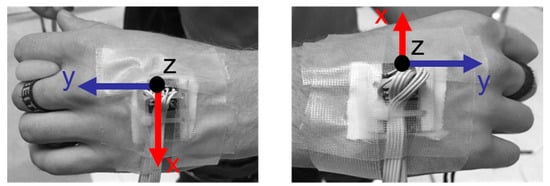
Figure 1.
Position of the sensor on the hands of one subject. The origin of the sensor was always at the level of the phalanx proximalis of the digitus manus III.
2.2. Experimental Setup
All measurements were carried out on two days at the Vienna Indoor Archery Center (VIAC, Vienna, Austria). Six archers (4 male, 2 female) with different skill levels (Table 1) participated voluntarily in this study, based on given oral consent, and no further ethical approval was requested. As two archers were available on both days, tests were carried out twice with those two.

Table 1.
Overview about the participants of this study.
All shots were carried out on two FITA 3-spot vertical target faces. Hits were classified in three categories. Category 1 (C1) covers hits scored with ten points (gold middle and gold first ring), category 2 (C2) covers hits scored with nine points (gold second ring) and category 3 (C3) covers all other hits. Every archer shot four sets of six arrows per set. The distance between the target and the shooting line was 18 m.
2.3. Data Treatment
As the unfiltered data should be used for the analysis, the data of the acceleration sensors were not filtered, and also were not integrated to calculate velocity or displacement. The acceleration of the y-axis was used to identify the beginning and the end of the movement. While nocking the bow, the arm points to the ground; thus, the acceleration in y-direction of its sensor is about +1 g. Next, the bow is lifted and the acceleration in y-direction becomes lower. As the bow arm is lifted above the horizontal, the acceleration in the y-direction crosses the baseline. This point in time was set as the beginning of the movement. The end of the movement (EOM) was identified based on the signal curve of the y-axis of the acceleration sensor on the drawing arm. The sudden movement of the drawing arm at the beginning of the releasing phase [6] can also be seen in the unfiltered data of the acceleration sensor. Therefore, the sudden increase of its signal in the y-direction indicates the beginning of the releasing phase, and was set as the EOM. After identifying the beginning and the end of the movement, the duration for the whole movement was calculated.
Furthermore, the range of motion (ROM) and the coefficient of variation (CV) were calculated for every axis, as well the resultant accelerations of both hands. The ROM was defined as the difference between the maximum and minimum acceleration, whereas the CV was calculated as the ratio of the standard deviation to the mean [4]. These calculations were carried out for multiple windows (Table 2), with a window size of 20 ms for the last 200 ms before the EOM. Thus, ROM and CV were calculated 10 times for each axis, as well as for the resultant acceleration.
Table 2.
Window expression.
All results were grouped according to the achieved category.
3. Results
3.1. Duration
The calculated median duration for the movement (Figure 2) is lowest for C1 shots. However, the shots leading to the worst category (C3) do not show the highest median duration, which was observed for C2 shots.
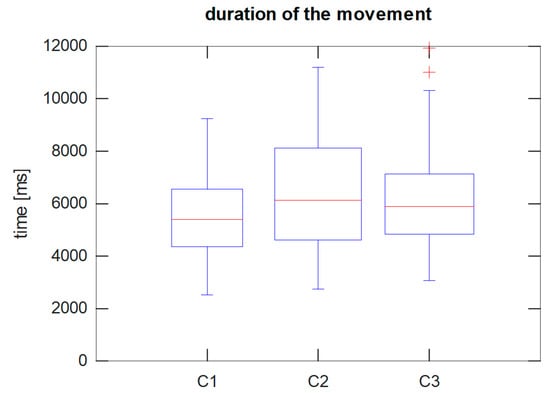
Figure 2.
Duration of the movement for the three categories (C1, C2 and C3). The figure shows the calculated minimum, 1st quartile, median (red line), 3rd quartile and maximum for every category.
3.2. Range of Motion
The median values of the ROM for the acceleration sensor of the bow arm (Figure 3) do not show big differences between the three categories. Only for the x-axis can a decrease in the last 20 ms (w1) be observed. The median values of the ROM for the acceleration sensor of the string arm (Figure 4) are higher than those of the bow arm and, with the exception of the z-axis, the changes of the median value from one window to the next are bigger.
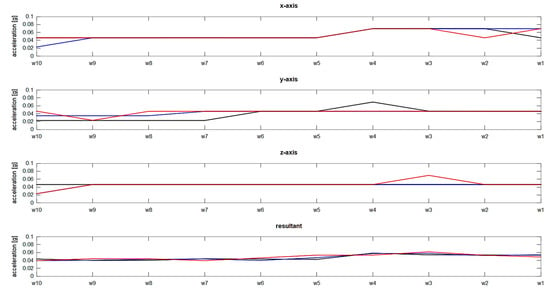
Figure 3.
Median values of the ROM for the three axes and the resultant acceleration of the bow arm. Every graph contains the values for C1 (black), C2 (blue) and C3 (red).
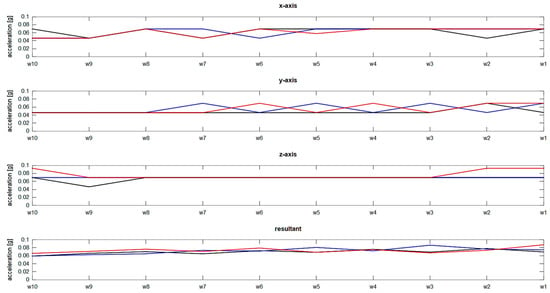
Figure 4.
Median values of the ROM for the three axes and the resultant acceleration of the string arm. Every graph contains the values for C1 (black), C2 (blue) and C3 (red).
3.3. Coefficiant of Variation
Figure 5 shows the calculated median values of the CV for the bow arm. It can be seen that, with exception of the y-axis, the change of the median value from one window to the next is very small. For the x-axis and the y-axis, the lowest ratio was observed for C3 shots. With the exception of the resultant acceleration, the calculated mean values of the CV for the string arm (Figure 6) shows differences between the three categories. The lowest ratio just before the beginning of the release phase (w1) was observed for C1 shots at the y-axis and the z-axis, whereas C2 shots led to the lowest ratio for the x-axis.
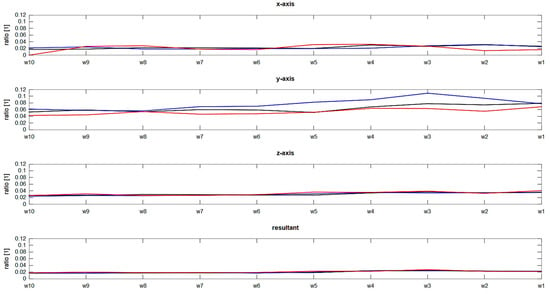
Figure 5.
Median values of the CV for the three axes and the resultant acceleration of the bow arm. Every graph contains the values for C1 (black), C2 (blue) and C3 (red).
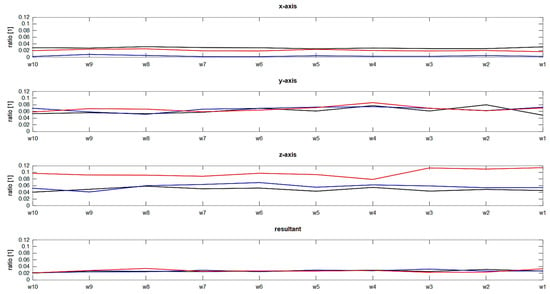
Figure 6.
Median values of the CV for the three axes and the resultant acceleration of the string arm. Every graph contains the values for C1 (black), C2 (blue) and C3 (red).
4. Discussion
As no statistical evaluation was carried out, the results can only be used to point out possible trends.
Nevertheless, based on the results of this study, it can be assumed that the lowest duration leads to the best category shot and therefore to the highest score. This finding is also confirmed by the results of a previous study [6]. However, the calculated durations of this study are higher than the ones in the previous study [6], and the supposition that the longest duration would lead to the worst category (score) cannot be confirmed. A reason for this could be the chosen beginning of the movement, which is before the beginning of the aiming phase.
With regard to the category achieved, it can be said that the calculations of the CV for all axes, and the resultant acceleration and the ROM for the resultant acceleration, do not seem to be the appropriate methods. It seems that, if the ROM of the axes is lowest during the 200 ms, the shot will lead to a high category. However, as the ROM for all axes at the time of decision (w10) was not the lowest for C1 shots, it is not clear if solely acceleration sensors can be enough to be used in a feedback system. Furthermore, the size of the window has to be discussed: is 20 ms too long or too short? To evaluate whether solely acceleration sensors can be used for a feedback system, further analysis should be carried out with smaller and bigger window sizes.
5. Conclusions
In this paper, two three-dimensional acceleration sensors were attached to the archer’s hands, and unfiltered data was analysed to determine possible correlations to the score that was reached. The results show that the calculation of the CV of all axes and the resultant acceleration do not seem to be an appropriate method, whereas the calculation of the ROM of single axes seems to be.
Conflicts of Interest
The authors declare no conflict of interest. This study was conducted without external sources of funding.
References
- Haidn, O.; Weineck, J.; Haidn-Tschalova, V. Bogenschießen, 2., Überarbeitete und Erweiterte Auflage; Spitta GmbH: Ballingen, Germany, 2010. [Google Scholar]
- Coaching Manual—Level 1. Available online: https://worldarchery.org/Coaching (accessed on 4 June 2019).
- Coaching Manual—Level 2. Available online: https://worldarchery.org/Coaching (accessed on 4 June 2019).
- Heller, M. Evaluation of arrow release in highly skilled archers using an acoustic measurement system. Procedia Eng. 2012, 34, 532–537. [Google Scholar] [CrossRef]
- Ertan, H.; Soylu, A.R.; Korkusuz, F. Quantification the relationship between FITA scores and EMG skill indexes in archery. J. Electromyogr. Kinesiol. 2005, 15, 222–227. [Google Scholar] [CrossRef] [PubMed]
- Taha, Z.; Mat-Jizat, J.A.; Omar, S.F.S.; Suwarganda, E. Correlation between archer’s hands movement while shooting and its score. Procedia Eng. 2016, 147, 145–150. [Google Scholar] [CrossRef]
- Ganter, N.; Matyschiok, K.C.; Partie, M.; Tesch, B.; Edelmann-Nusser, J. Comparing three methods for measuring the bow in the aiming phase of Olympic archery. Procedia Eng. 2010, 2, 3089–3094. [Google Scholar] [CrossRef]
- Vervaeke, J.; Saldien, J.; Verstockt, S. ArcAid Interactive Archery Assistant. In Proceedings of the 2015 7th International Conference on Intelligent Technologies for Interactive Entertainment (INTETAIN), Turin, Italy, 10–12 June 2015. [Google Scholar] [CrossRef]
- Trevena, J.A.; Miller, J. Cortical Movement Preperation before and after a Conscious Decision to Move. Conscious. Cogn. 2002, 11, 162–190. [Google Scholar] [CrossRef] [PubMed][Green Version]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).