1. Introduction
In the sport of boxing it is “widely known that speed (reaction time) and power (attacking force) are two main factors” that are crucial in ensuring a win by delivering a knock-out blow to one’s opponent ([
1], p. 139). These physiological characteristics, along with the oxygen uptake an athlete possesses, are what can empower the individual to deliver a damaging punch with sufficient force and power. Yet, without the appropriate technique, a boxer is unable to effectively utilise their physiological characteristics to maximise punch power. This is due to the psychological effect in that as a boxer grasps the fundamental techniques of boxing and grows in confidence so too does their speed, movement and power [
2,
3].
Numerous measurement training systems have been designed, developed and tested in an attempt to provide a point of reference to scale the intrinsic performance of athletes within the sport of boxing. However, the underlying flaws of the instruments presented in literature have lacked reliability and the ability to provide measurements on the achievable punch power of a boxer, without the inherent effects of damping in the measurement apparatus. Additionally, the majority of systems have encompassed target-based measurement devices.
Chadli, Ababou and Ababou [
4] created an apparatus using a plate target system with accelerometers and strain gauges to measure acceleration and force of the fist. Similarly, Buśko et al. [
5] used a boxing bag with an embedded accelerometer to measure force of the fist. With these two measurement systems there was no value for velocity reported and there was no compensation for the energy damping in the setup of the apparatus.
Walilko, Viano and Bir [
6] utilised a Hybrid III Headform to measure velocity, acceleration and force of both the fist and head. This system minimised the effects of damping in the measurements, but was unable to eliminate the effects completely. By contrast, this was achieved by Whiting, Gregor and Finerman [
7] who used a remote system with two high-speed cameras to determine velocity and acceleration of the fist; however, the exact point of impact could not be identified and there was no method to measure force.
Smith, Dyson, Hale and Janaway [
8] created an apparatus using force transducers to measure force which was able to cater for anthropometric variation in athletes, but not the effects of damping present in the boxing manikin developed.
With all the aforementioned measurement systems developed they may be classified as static systems, as there is no portability or adjustability factored into the design to account for differing techniques of boxers.
To cater to the dynamic aspects of boxing Pierce, Reinbold, Lyngard, Goldman and Pastore [
9] developed an embedded in-glove measurement system using a capacitive force sensor to measure force of the fist during an actual boxing match. Although able to provide real time feedback, this system was unable to provide feedback on velocity; additionally, it was reported that the kinesthetic feel of the boxing glove was compromised by the placement of the embedded sensor.
Therefore, despite delivering valid results, many of the punch measuring devices have resulted in values that do not fully reflect the attacking force and multidirectional components of a punch, nor do they consider the dynamic repeated-sport that is boxing [
1,
8].
This study aimed to investigate an appropriate non-embedded in-glove measurement device that will deliver consistent punch power feedback at a peak value, lending itself to use within the boxing ring to evaluate a boxer’s technique. There has been minimal research into a measurement sensor that may consistently evaluate the appropriate punch technique that yields the punch power reflective of a boxer’s skills and ability to deliver a punch at maximum force and speed within the realm of an official boxing match.
2. Materials and Methods
In total, 31 novice boxers participated in this study which took place at the University of Wollongong. Of the 31 boxers, 21 were male and the remaining 10 were female. The average male boxer mass (mean ± s) was 76.4 ± 10.2 kg, with an average height of 1.78 ± 0.07 m. The average female boxer mass was 64.8 ± 14.9 kg, with an average height of 1.67 ± 0.08 m. Therefore, the total sample pool averages were 72.7 ± 11.7 kg for mass and 1.74 ± 0.07 m for height.
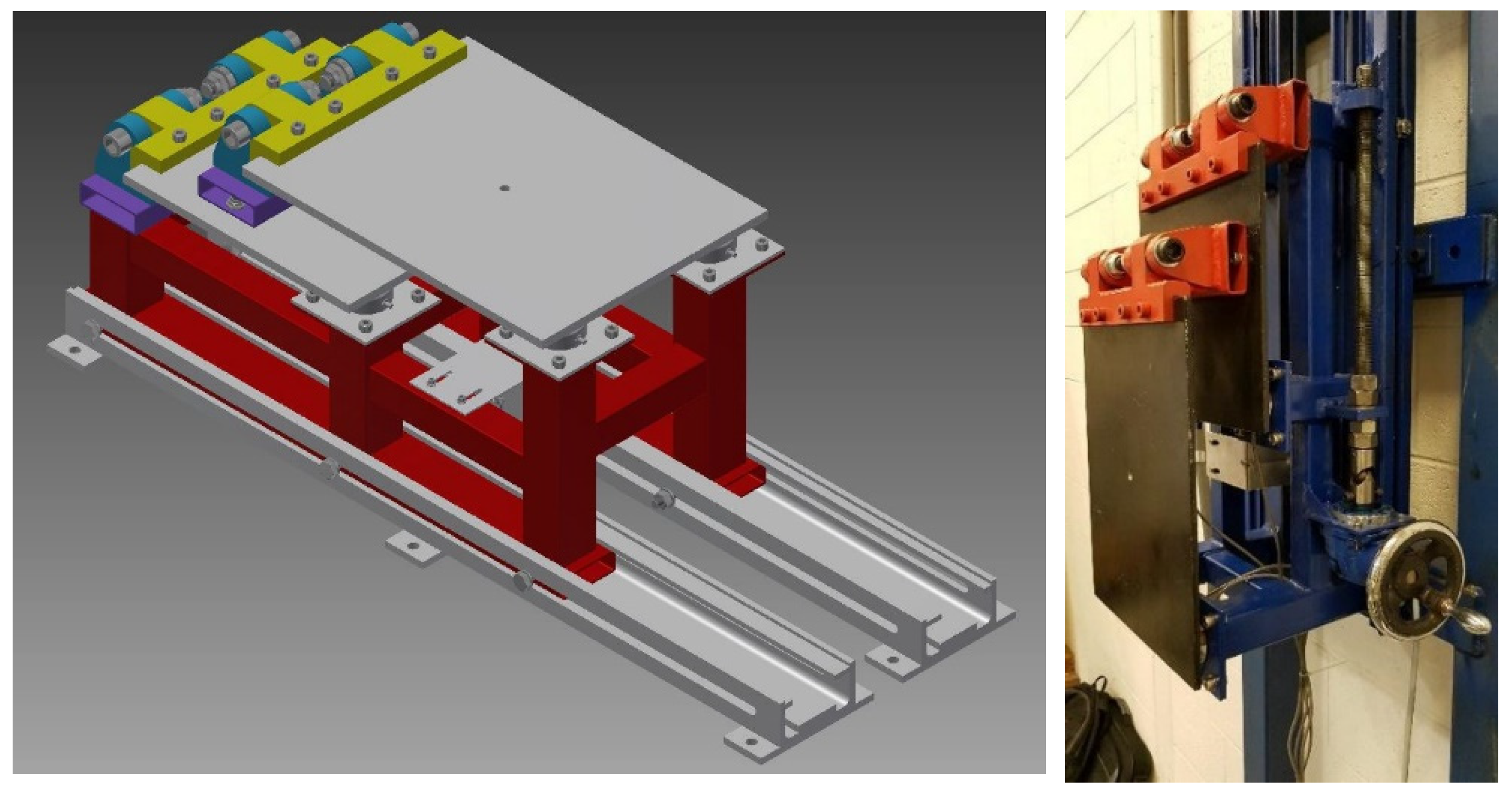
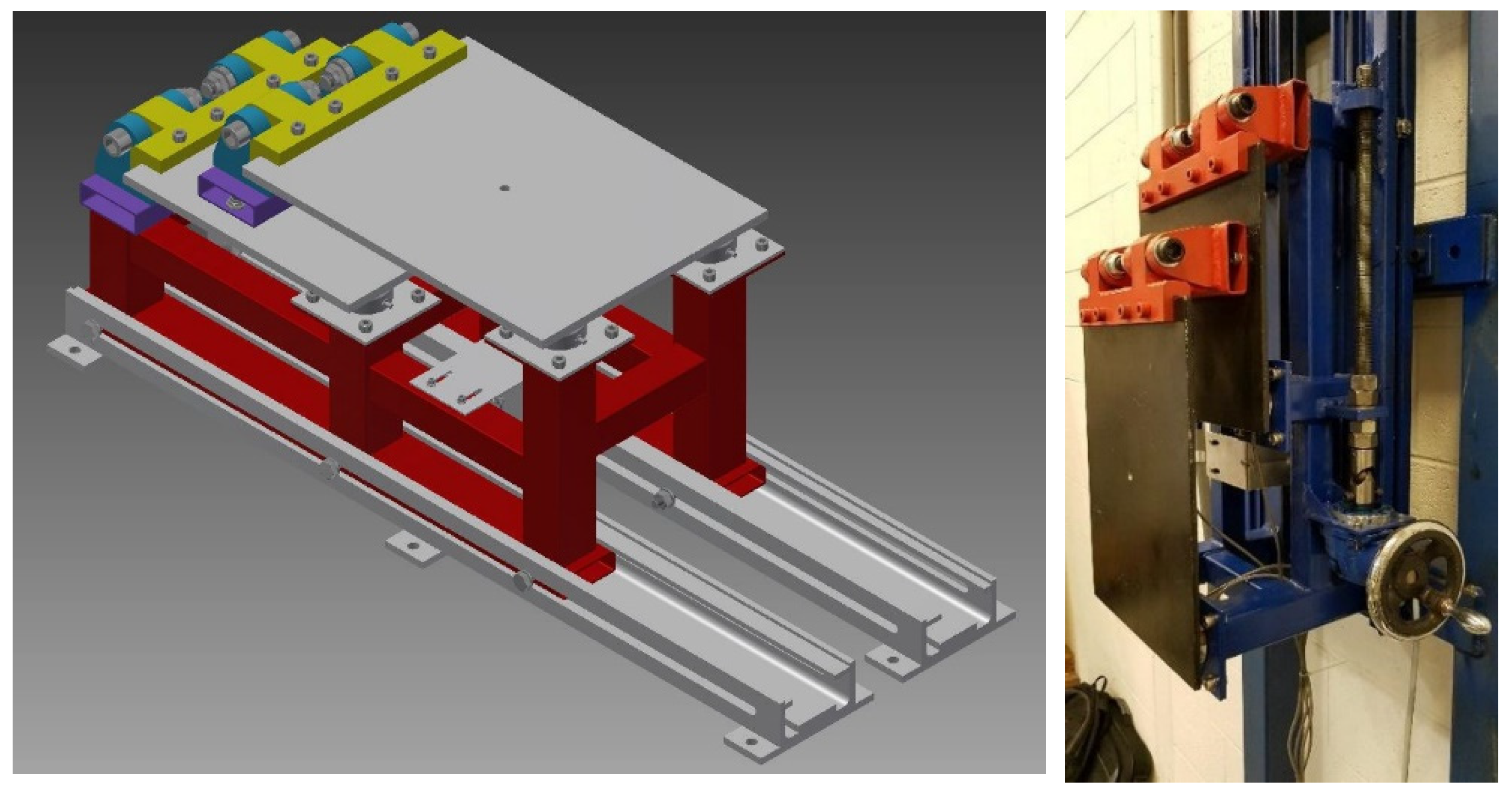
Data was collected using an apparatus consisting of two separate devices. The first device was a static measurement system (see
Figure 1) designed to measure the maximal punch force at impact and the corresponding instantaneous velocity prior to impact of a boxing punch. This provided a means to estimate the subsequent power generated. The static measurement system was also required to provide a means for calibration of the second device, which was a dynamic measurement system. Its design utilised non-embedded in-glove sensors to measure the equivalent maximal force at impact, calibrated by the static measurement system, and the corresponding acceleration at impact exerted by the hand/fist of a boxer when a punch was thrown.
Both measurement systems were adaptable to cater for all experience levels and anatomical requirements of each participant. The static system was height adjustable to cater for different heights of participants and the dynamic system was transferrable to each participant without requiring custom-made boxing gloves.
The individual measurement devices in each system were selected based on the apparatus design and the force and velocity values recorded in the literature.
The static measurement system utilised a combination of two 250 kg and two 100 kg compression disk load cells to measure the impact force. The instantaneous velocity prior to impact was measured using a 200 mm laser displacement sensor.
The dynamic measurement system utilised a tri-axial accelerometer to measure the acceleration at impact, as well as the deceleration immediately following impact. The force sensor selected was a flexible piezoresistive sensor. With this type of sensor being new to this particular application, two 1-inch sensors were connected in series to maximise the coverage of the impact area on the fist.
The load cells were calibrated using an Instron 3367 Tensile Test Machine and the corresponding Bluehill Software. The Bluehill Software was programmed to apply a loading cycle of 500 N over 10 s, with a hold for 10 s between each loading cycle. This loading cycle was applied up to 1500 N for the two (2) 150 kg load cells and 2500 N for the two (2) 250 kg load cells.
Additional to the Instron calibration, once the load cells were mounted into the static measurement system apparatus, a secondary calibration was conducted to confirm the accuracy of the load cell performance within the system itself. The second calibration involved loading the apparatus with calibrated weights from 2 kg up to a maximum of 72 kg in 10 kg increments. For safety reasons, the remaining data up to 500 kg was extrapolated, obtaining a 6.2% deviation between theoretical and experimental force readings in the midrange of the data. This calculated deviation was applied to the experimental results during the post-processing of the data.
The theory behind the development and calibration of the selected flexible piezoresistive force sensor was to use the static measurement system to calibrate the sensor by punching the static apparatus, which would generate a calibration coefficient to be applied to the voltage output of the force sensor in order to provide a force reading in Newtons.
The outputs from the four load cells were processed via a National Instruments’ 9205 DAQ Card and the laser displacement sensor output was processed via a National Instruments’ 9203 DAQ Card. Similarly, the outputs for the force sensors were processed by the same National Instruments’ 9205 DAQ Card as that used for the load cells and the output of the accelerometer was processed via a National Instruments’ 9234 DAQ Card. All the data acquisition (DAQ) cards were integrated into the same system circuit and connected to a computer equipped with National Instruments’ LabVIEW, sampling data at a rate of 5 kHz.
The testing venue was located in the SMART Infrastructure Building at the University of Wollongong (UOW). Each subject was asked to review a risk assessment and sign a liability waiver form prior to participation. At this point, each participant was given the option to leave the experimentation if not in a physically or mentally fit state. The biometrics of each participant were determined, along with their overall boxing experience level. Following this, the testing sequence began.
Each participant was equipped with an appropriately sized pair of boxing gloves to complete a 2-min warm-up on a proprietary free-standing boxing bag. At the completion of the warm-up period, wraps were applied to both hands with the non-embedded in-glove sensors placed within the wraps of the participant’s dominant hand. Finally, the static measurement system was adjusted to the correct height and the participant then completed a 1-min round of single rear-hand maximal punches using the dominant hand against the static measurement system with the dynamic measurement system.
3. Results
The maximum force of the rear hand at impact ranged from a minimum of 758 N through to a maximum of 3845 N, with an average of 2.31 kN ± 3.28 kN. The participants typically commenced the testing very strong in an attempt to achieve a maximal result before very quickly succumbing to fatigue for this same reason.
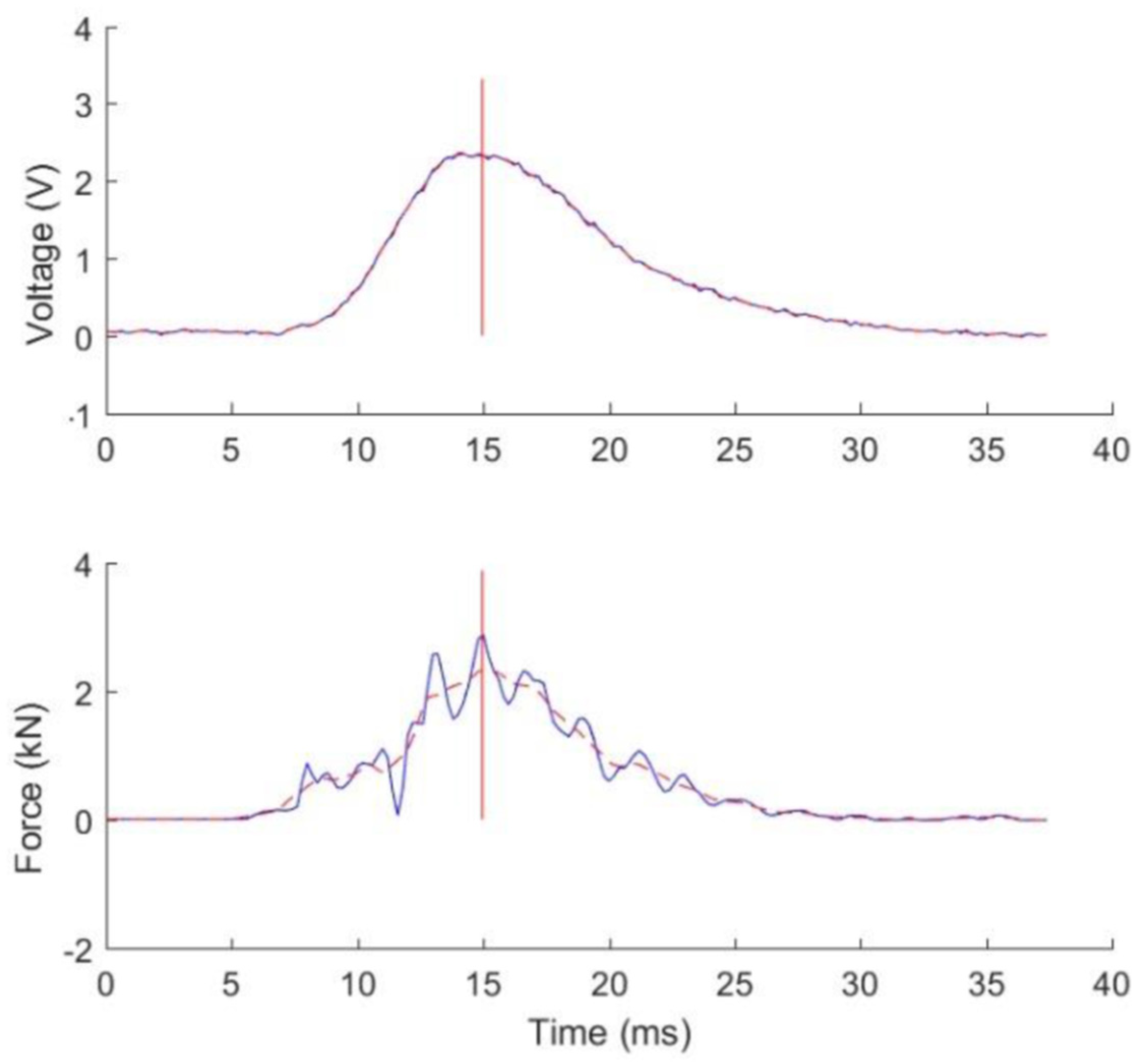
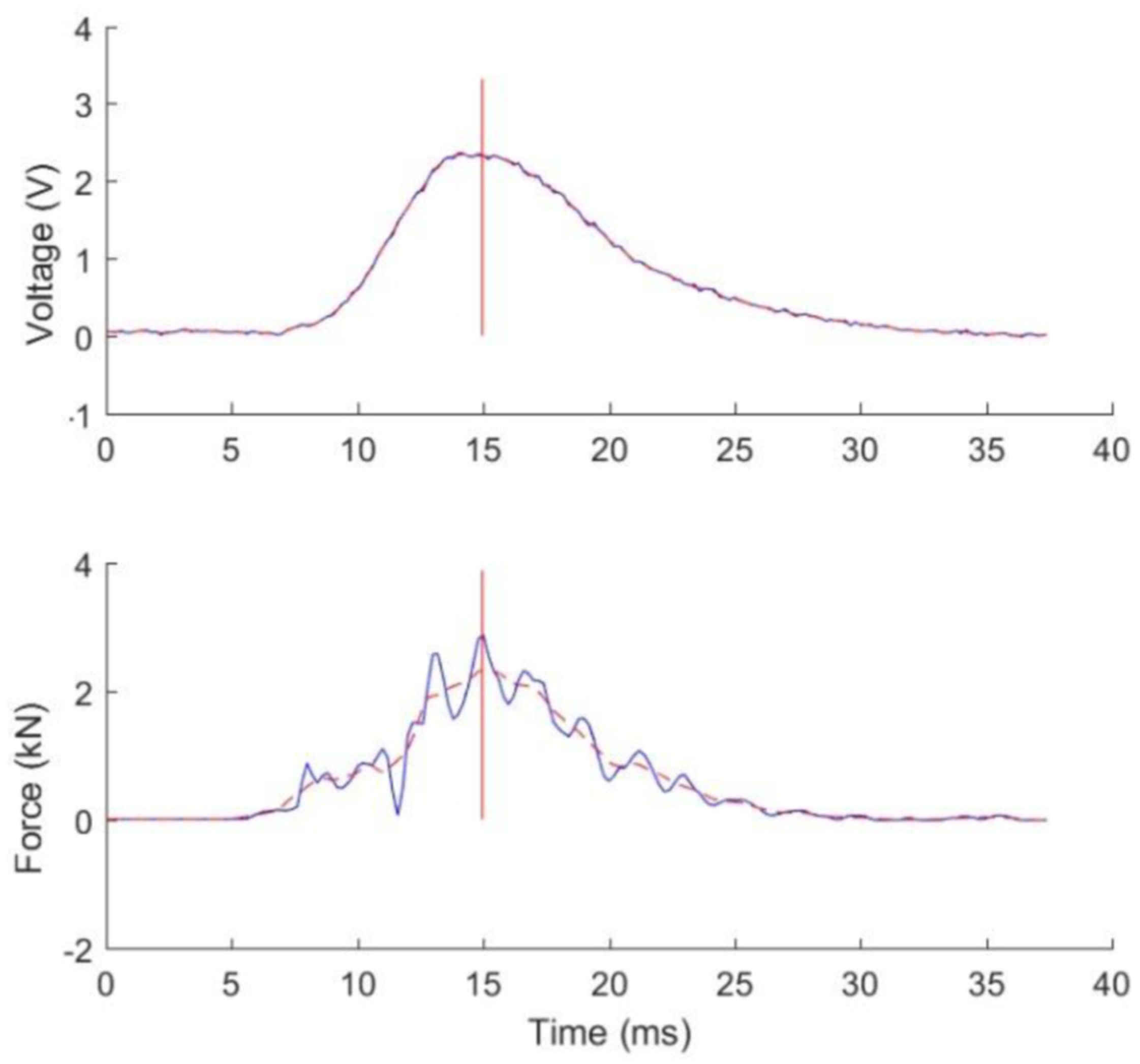
The maximum piezo voltage of the rear hand at impact ranged from a minimum of 1.43 V through to a maximum of 6.77 V, with an average of 4.03 V ± 0.61 V. The results closely follow the trend of the resultant impact force and the degree of inconsistency for each participant is also very similar to that indicated by the resultant force (see
Figure 2).
The maximum acceleration of the rear hand at impact ranged from a minimum of 35 g through to a maximum of 172 g, with an average of 91 g ± 11 g. A large variation between the maximum and average acceleration results was recorded for each participant, which may be attributed to both the respective boxers’ skill level and the fatigue experienced during testing. As each participant began to fatigue towards the end of the testing period, there was an element of compensation on the participants’ behalf in an attempt to maximise the power exerted by increasing the speed at which contact was made.
The maximum deceleration of the rear hand directly following impact ranged from a minimum of 140 g through to a maximum of 454 g, with an average of 223 g ± 21 g. Unlike the acceleration, the deceleration was relatively consistent for each participant. This was due to the target used in the static measurement system being a solid structure with no damping. For this very reason, each participant exhibited very little follow-through when punching, resulting in a relatively consistent deceleration immediately following impact for each punch thrown.
The maximum instantaneous velocity immediately prior to impact ranged from a minimum of 1.86 m/s through to a maximum of 5.66 m/s, with an average of 4.73 m/s ± 0.35 m/s. The spread of data for each participant followed the results seen for the impact acceleration. Each participant exhibited a comparable variation between the average velocity and maximum velocity achieved as a result of fatigue towards the end of the testing period.
The maximum power generated by the rear hand during the punching sequence for each boxer ranged from a minimum of 2790 W through to a maximum of 21,769 W, with an average of 11.2 kW ± 2.05 kW. This value is an approximation through multiplying the impact force by the instantaneous velocity prior to impact.
4. Discussion and Conclusions
The purpose of this study was two-fold: to develop a static measurement system capable of measuring the reference impact punch force and instantaneous impact velocity and to then develop a dynamic measurement system, complete with non-embedded in-glove sensors, capable of measuring impact acceleration and impact force utilising a calibration coefficient from the static measurement system.
With the two measurement systems designed and tested, there were limitations recorded during testing. The static measurement system was subject to falsely amplified force readings. As each punch was thrown at the top impact plate, it had a tendency to bounce off the load cells and stop a nominal distance away, consequently creating an air gap between the backside of the plate and the load cells. Then, once the next punch in the sequence was thrown, if the plate was not reset back on to the load cells before this time, the resultant force would be falsely amplified in its reading due to the additional imposed momentum.
The second limitation of the static measurement system was that of the chosen laser displacement sensor. As the maximum sampling rate of the sensor was 750 Hz and the experimental testing sample rate was set to 5 kHz, the accuracy of the output signal of the laser displacement sensor in comparison to the whole system was compromised as few data points were recorded in the measuring range.
The main drawback of the dynamic measurement system was with the flexible piezoresistive force sensor. The sensor itself was non-intrusive and lightweight without requiring modification to the boxing glove used. However, the size and placement of the sensor didn’t allow for a calibration coefficient to be achieved, despite an average correlation coefficient to the impact of 0.85. The placement of the sensor between the first two knuckles of the fist did not provide enough coverage for all punching techniques. Additionally, the capacity of the sensor was insufficient to provide data beyond 3500 N force.
Considering the limitations of the experimental apparatus, the results achieved still agreed with the literature and were sufficient to validate the design of both measurement systems.
For the 31 novice participants, the average maximum impact force of 2310 N was slightly larger than that reported by Chadli, Ababou and Ababou [
10], which was between 761 N and 1162 N. This was due to the damping device used which was absorbing energy during testing. Buśko et al. [
4] recorded similar results to Chadli, Ababou and Ababou [
10] of 1170.7 N for females and 1592.5 N for males. These values mimic similar issues with damping the energy with the accelerometer embedded within the boxing bag.
Smith, Dyson, Hale and Janaway [
8] recorded a maximal punching force for a group of novice boxers to be 2381 N. This value is very similar to that produced in this study.
The average maximum instantaneous velocity prior to impact of 4.73 m/s is smaller than the values obtained by Walilko, Viano and Bir [
6] and Whiting, Gregor and Finerman [
7], considering that professional grade boxers were used in both of their studies. Walilko, Viano and Bir [
6] reported a maximum punch velocity of 9.14 m/s, and Whiting, Gregor and Finerman [
7] reported a similar 8 m/s.
Similar to the results for the impact force reported in literature, the acceleration results experienced the same effects of damping in addition to effects stemming from the use of linear and/or bi-axial accelerometers for measurement. Chadli, Ababou and Ababou [
10] yielded an impact acceleration between 23.2 g and 30.2 g. Walilko, Viano and Bir [
6] recorded a mean impact acceleration of 58 g. Whiting, Gregor and Finerman [
7] recorded a mean impact acceleration of 41.79 g. All of these reported results are smaller than the 91 g recorded for the average maximum acceleration at impact in this study. Additionally, this study provided a measurement on the mean maximum deceleration immediately following impact, which was 223 g and is a measurement parameter that appears not to have been reported in previous literature.
The validation of the flexible piezoresistive force sensor may be validated against the impact force obtained, as this particular type of sensor hasn’t been previously used in other studies performed within this field of study. As such, a correlation between the averages of the voltage output of the sensor and the already-validated impact force provides a least squares regression of 0.85. Taking into consideration the limitations of the sensor, the effectiveness of the piezo sensor as a non-embedded in-glove force measurement device may be deemed plausible.
With the validation of the static measurement system, the estimated power generated at impact provided an average maximum of 11,200 W. This is comparable to the 8014 W recorded by Walilko, Viano and Bir [
6].
The main focus of this study was to develop a reliable biomechanical measurement device capable of determining the power generated by the punch of a boxer. It is noted that this study was the first to deal with energy damping in the measurement of biomechanical parameters and also the investigation into a non-embedded in-glove power measurement sensor. The components of the investigation included a static measurement system providing data on the punch force and velocity and a dynamic measurement system providing data on the punch force and acceleration based on calibration by the static measurement system.
The findings of this study provide feasibility for the use of piezoresistive sensors as reliable and repeatable force measurement sensors in a non-embedded in-glove system. This provides a means for the assessment of glove geometry and construction and their relation to energy absorption during a boxing match. This all leads to both better and safer boxing by developing appropriate training methods to teach boxers of all levels techniques to increase the effective mass of their punch [
6,
7].

{kind=link}
{kind=link}