Early Detection of Damages Based on Comprehensive Theory of Deformation and Fracture †


Abstract
:1. Introduction
2. Field theory of Deformation and Fracture
2.1. Field Equations
- Linear elastic regime
- 2.
- Elasto-plastic regime 1
- 3.
- Elasto-plastic regime 2
- 4.
- Pre-fracture regime
2.2. Wave Equations
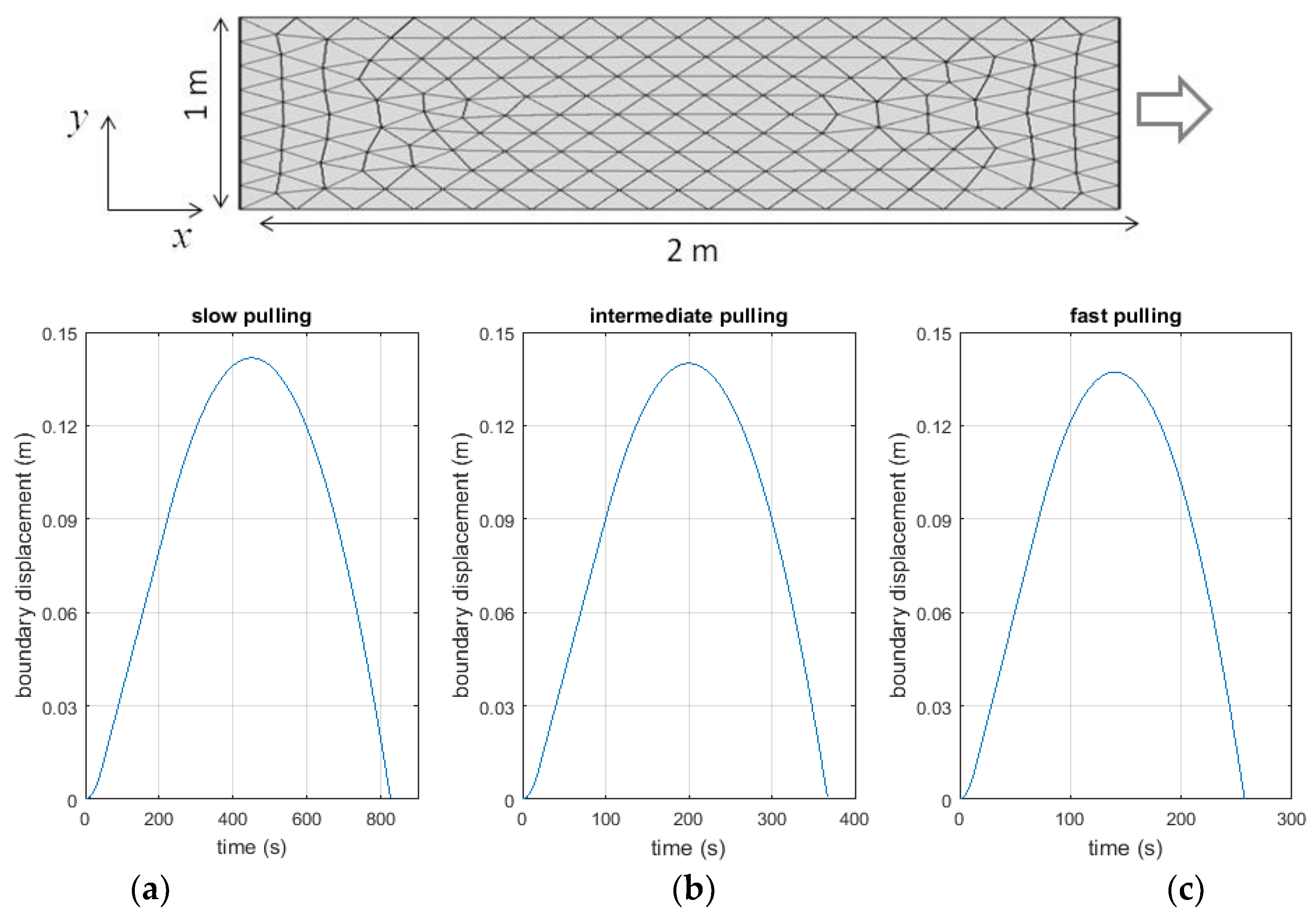
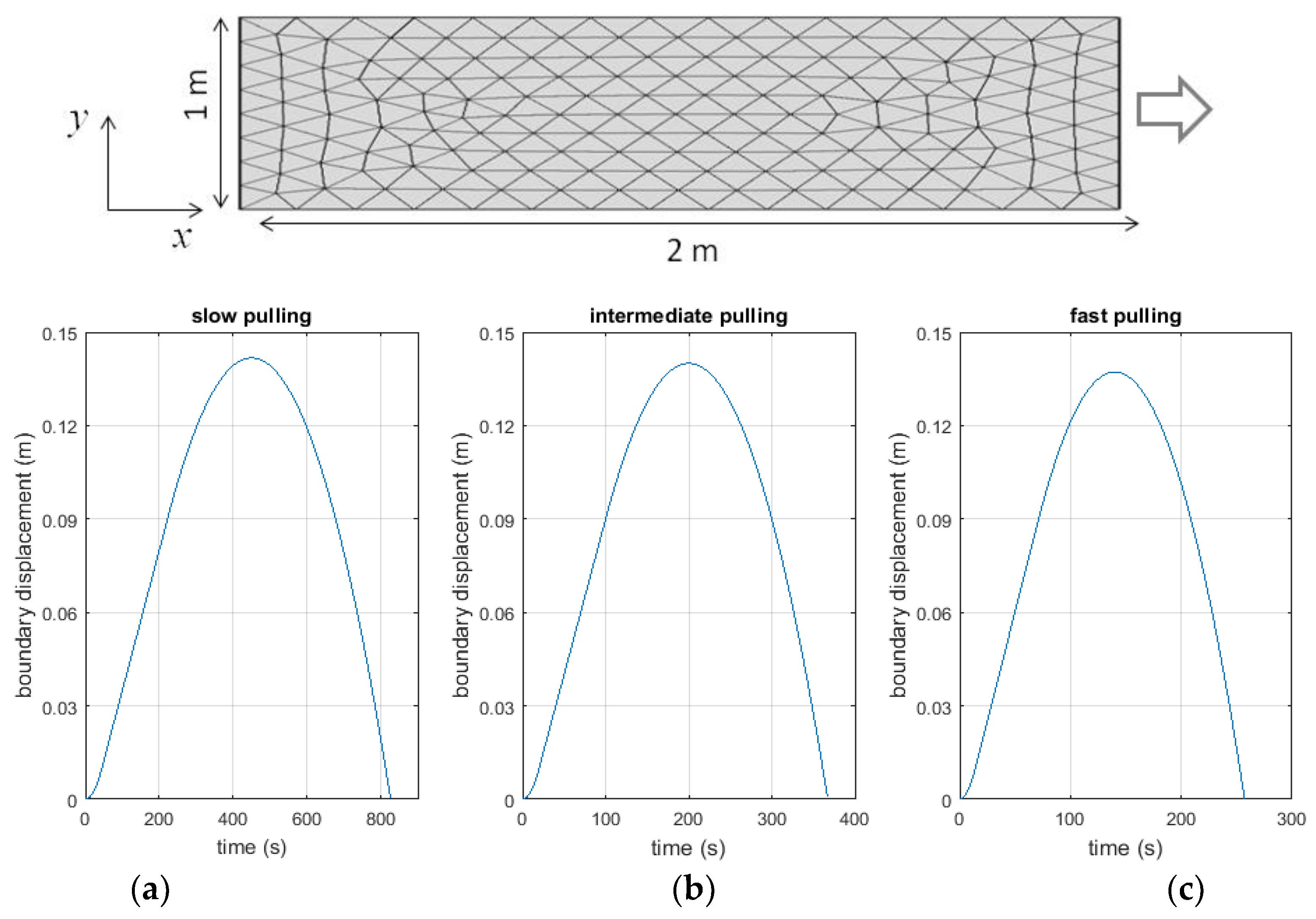
3. Modeling
3.1. Partial Differential Equation
3.2. Boundary Condition
4. Results and Discussions
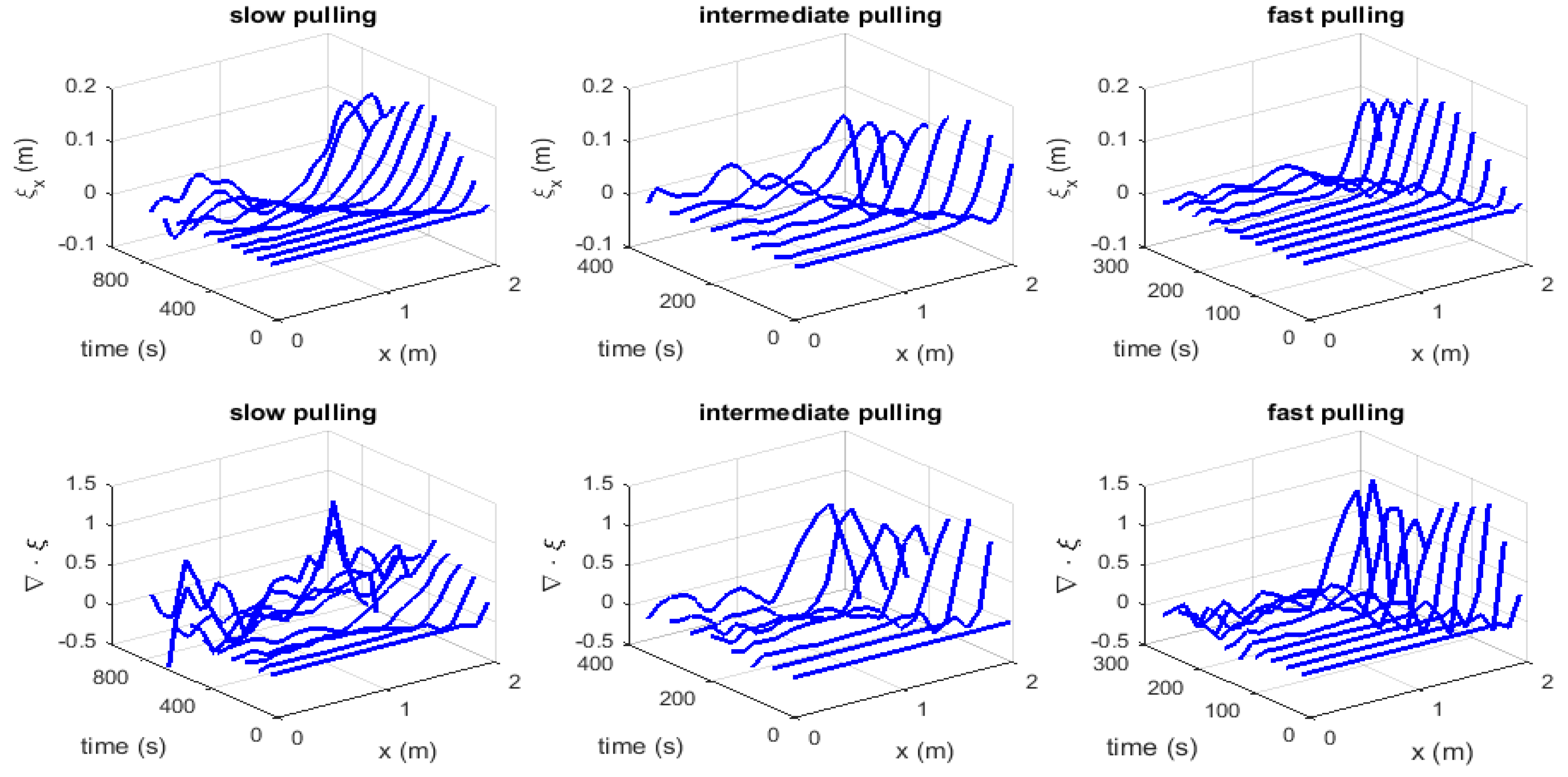
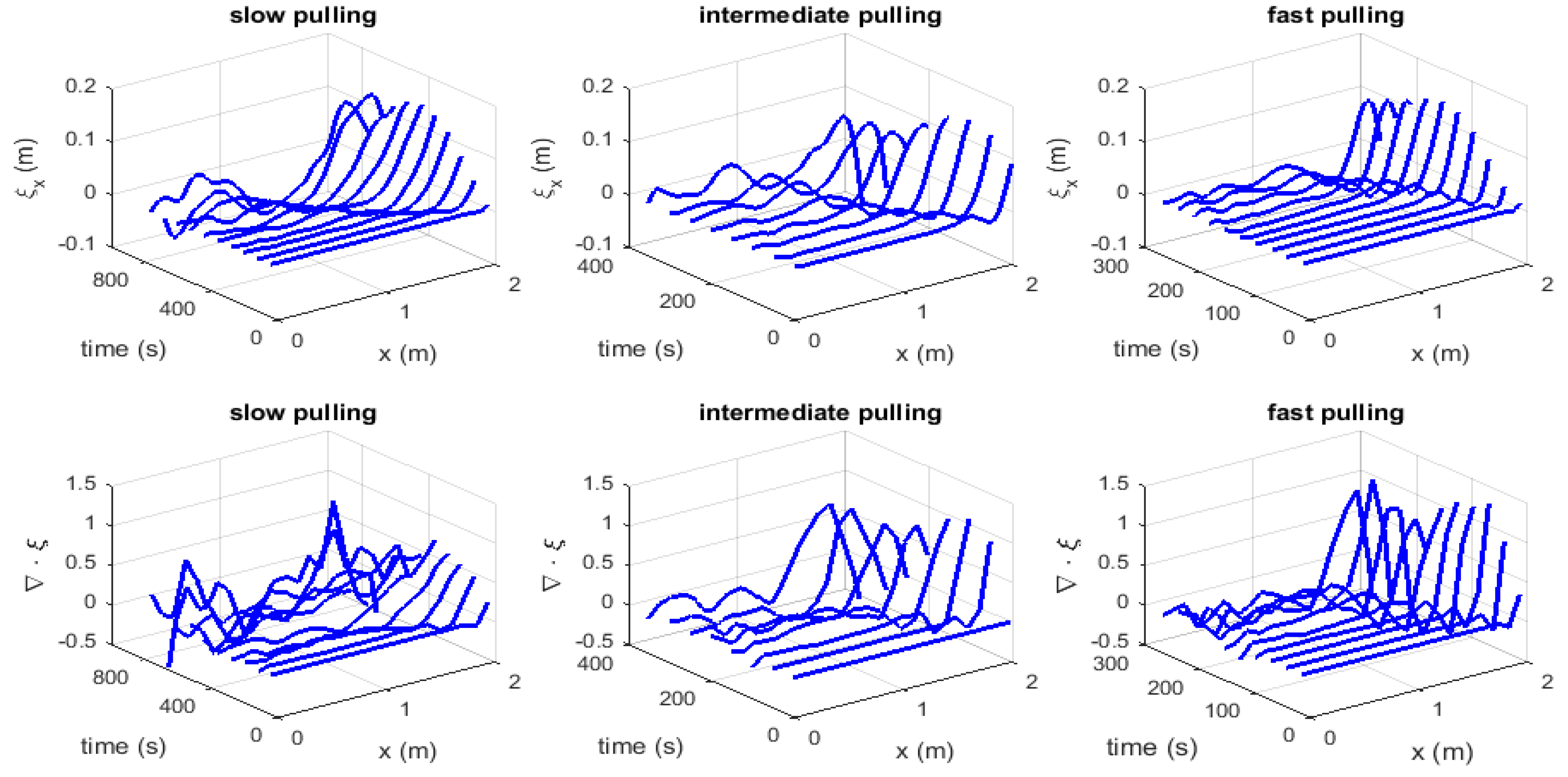
- The effect of pulling rate is more prominent in the volume expansion waves than the displacement waves. This indicates that the volume expansion part of is more sensitive to the pulling rate.
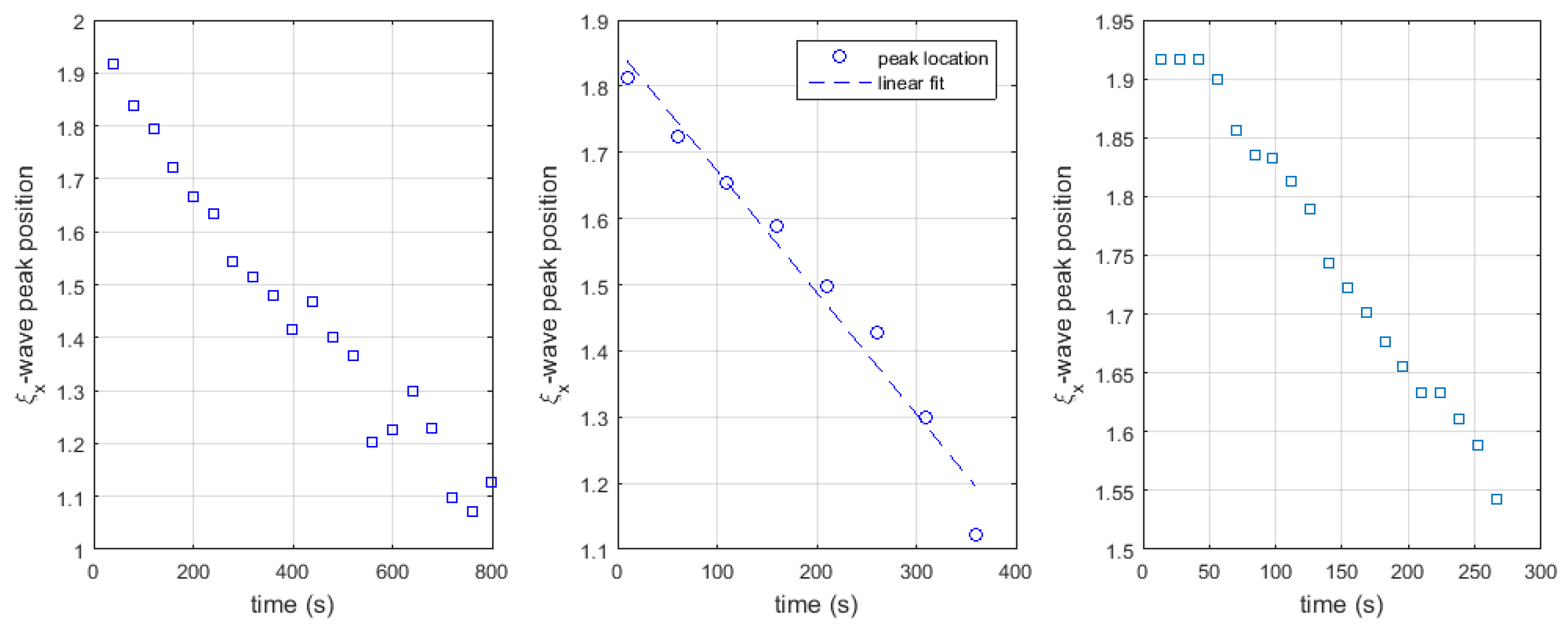
- The effect of pulling rate is more prominent in the second half (the descending half of Figure 2) than the first half (the ascending half of Figure 1). Fracture is induced by strain concentration. This observation indicates that fracture occurs when the direction of the applied force is reversed. It also indicates that the deformation dynamics is more influential to strain concentration than the average strain. Notice that the pulling is symmetric in time so that the average strain is symmetric in the ascending and descending halves.
- The fast pulling case indicates more concentrated volume expansion. This can be interpreted as follows. When pulled slowly, the solid has time to redistribute the volume expansion. Conversely, when pulled fast, at a certain peak in or is more prominent than the others. In other words, the solid tends to have strain concentration more easily when pulled faster. This and Observation 2 are consistent with our intuition that when we try to break a solid object we tend to apply a force in one direction and reverse the direction fast.
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Anderson, T.L. Fracture Mechanics: Fundamentals and Applications, 4th ed.; CRC Press: New York, USA, 2017. [Google Scholar]
- Barsom, J.M.; Rolfe, S.T. Fracture and Fatigue Control in Structures: Applications of Fracture Mechanics, 3rd ed.; ASTM: West Conshohocken, PA, USA, 1999. [Google Scholar]
- Yoshida, S. Deformation and Fracture of Solid-State Materials: Field Theoretical Approach and Engineering Applications, 1st ed.; Springer: New York, NY, USA, 2015. [Google Scholar]
- Yoshida, S. Comprehensive description of deformation of solids as wave dynamics. Math. Mech. Complex Syst. 2015, 3, 243–272. [Google Scholar] [CrossRef]
- Barsom, J.M.; Rolfe, S.T. Effects of Temperature, Loading Rates, and Constraint. In Fracture and Fatigue Control in Structures, Applications of Fracture Mechanics, 3rd ed.; ASTM: West Conshohocken, PA, USA, 1999; pp. 95–117. [Google Scholar]
- Armstrong, R.W.; Walley, S.M. High strain rate properties of metals and alloys. Int. Mater. Rev. 2008, 53, 105–128. [Google Scholar] [CrossRef]
- Yoshida, S.; Sadeqi, S. Wave dynamics of deformation and fracture. AIP Conf. Proc. 2017, 1895, 040005. [Google Scholar] [CrossRef]
- Marsden, J.E.; Hughes, T.J.R. Mathematical Foundations of Elasticity; Prentice-Hall: Englewood Cliffs, NJ, USA, 1983. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
| Deformation Regime | Resistive Force Expression |
|---|---|
| Linear elastic | |
| Elasto-plastic 1 | |
| Elasto-plastic 2 | |
| Pre-fracture 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoshida, S.; McGibboney, C. Early Detection of Damages Based on Comprehensive Theory of Deformation and Fracture. Proceedings 2018, 2, 354. https://doi.org/10.3390/ICEM18-05201
Yoshida S, McGibboney C. Early Detection of Damages Based on Comprehensive Theory of Deformation and Fracture. Proceedings. 2018; 2(8):354. https://doi.org/10.3390/ICEM18-05201
Chicago/Turabian StyleYoshida, Sanichiro, and Conor McGibboney. 2018. "Early Detection of Damages Based on Comprehensive Theory of Deformation and Fracture" Proceedings 2, no. 8: 354. https://doi.org/10.3390/ICEM18-05201
APA StyleYoshida, S., & McGibboney, C. (2018). Early Detection of Damages Based on Comprehensive Theory of Deformation and Fracture. Proceedings, 2(8), 354. https://doi.org/10.3390/ICEM18-05201