Performance Analysis of Detector Algorithms Using Drone-Based Radar Systems for Oil Spill Detection †

{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Reflectivity Theoretical Calculation
2.2. Detection Algorithms
2.2.1. Single Frequency Detector
2.2.2. Dual Frequency Detector
3. Results
3.1. Simulation Setup
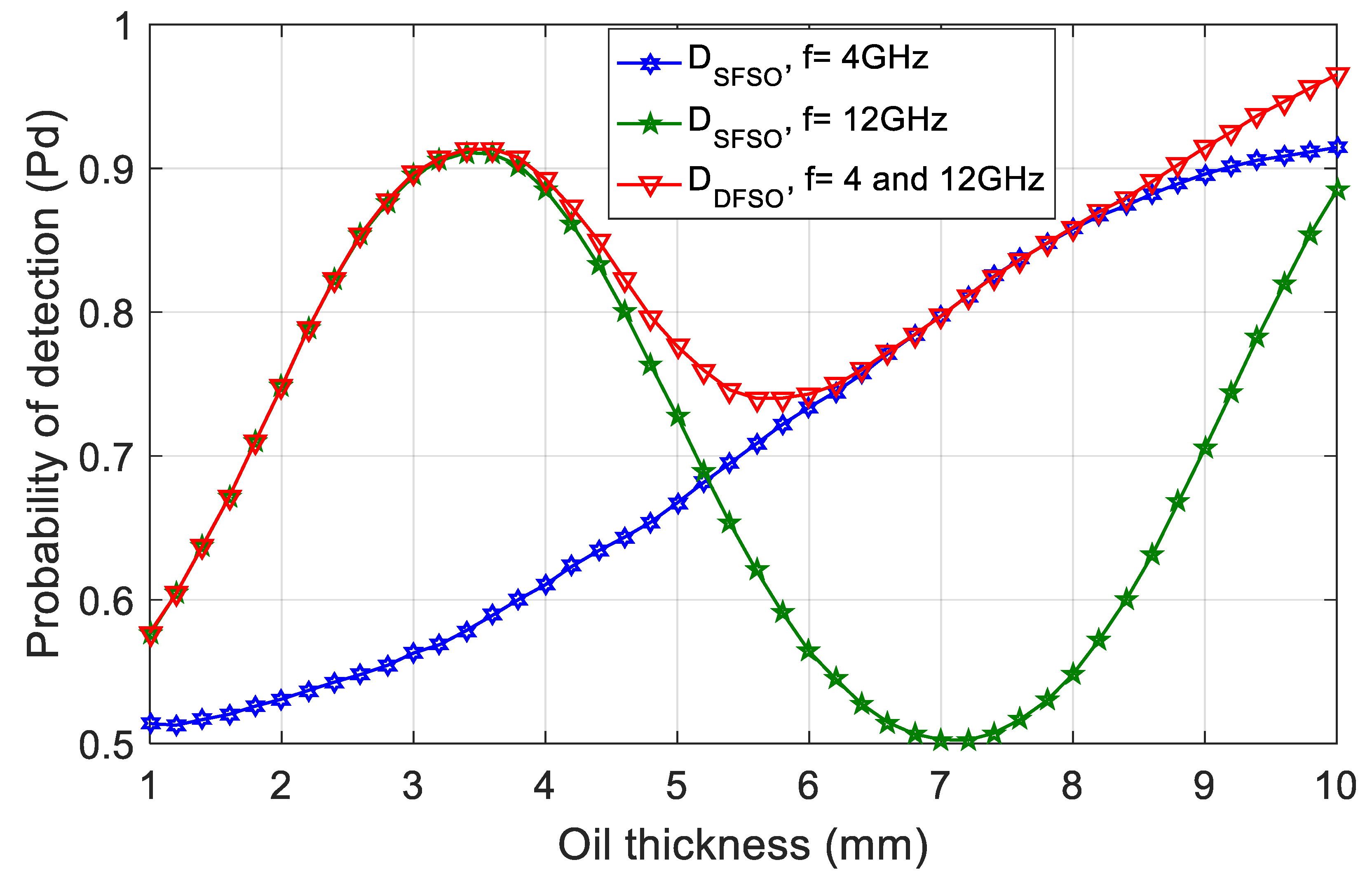
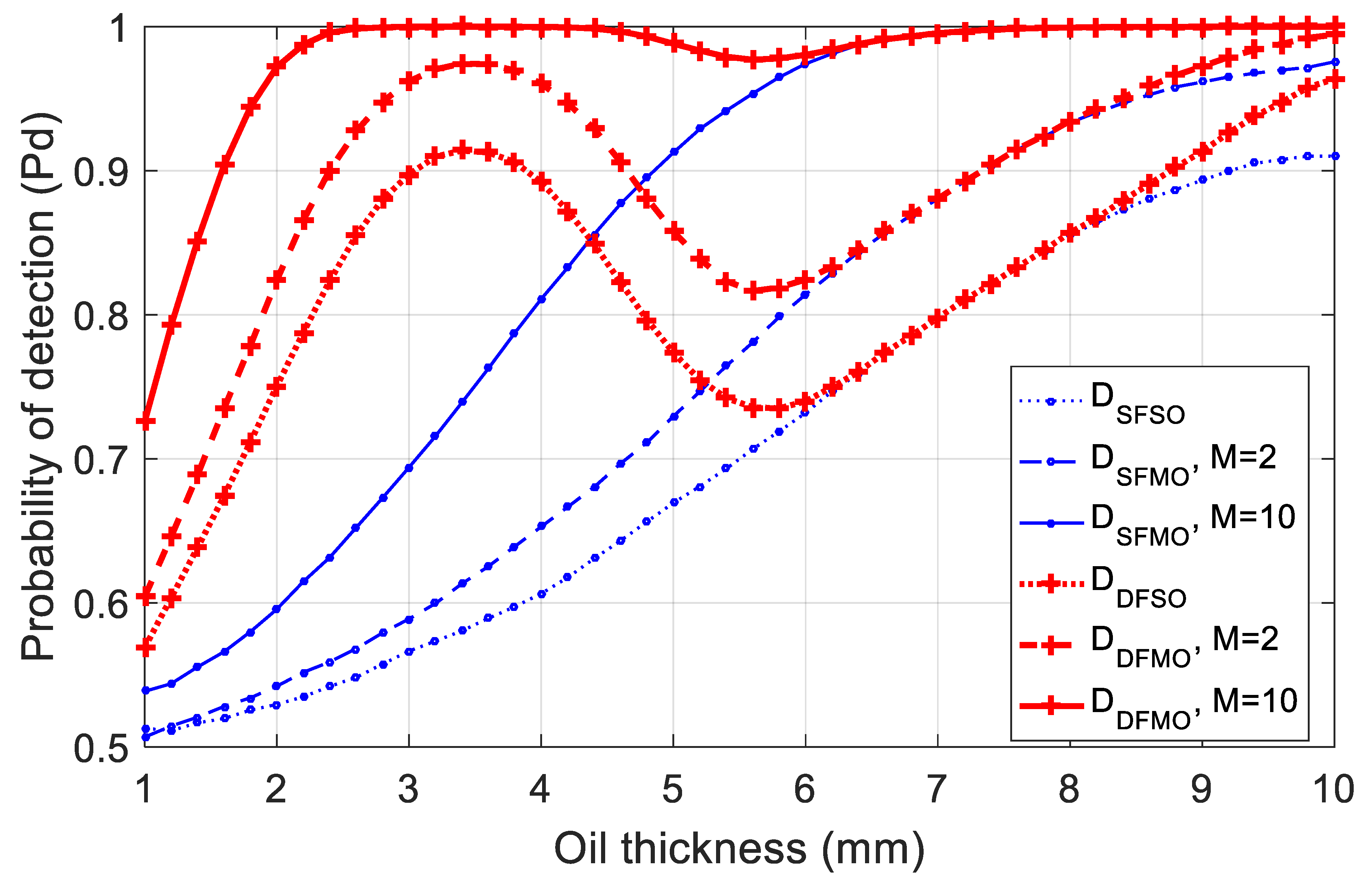
3.2. Results Analysis
4. Conclusions
Acknowledgments
References
- Alpers, W. Remote sensing of oil spills. In Maritime Disaster Management Symposium; King Fahd University of Petroleum and Minerals, Dhahran, Saudi Arabia, 2002; pp. 19–23.
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef]
- Jha, M.N.; Levy, J.; Gao, Y. Advances in remote sensing for oil spill disaster management: State-of-the-art sensors technology for oil spill surveillance. Sensors 2008, 8, 236–255. [Google Scholar] [CrossRef] [PubMed]
- Lecomte, E. En fevrier 2017, des drones vont traquer la pollution maritime. Sciences et Avenir, 17 January 2017. [Google Scholar]
- Yadav, M.; Sharma, D.; Sharma, O. Propagation of Electromagnetic Waves in Multilayer Structure. IJRREST Int. J. Res. Rev. Eng. Sci. Technol. 2013, 2, 81. [Google Scholar]
- Ulaby, F.T.; Long, D.G.; Blackwell, W.J.; Elachi, C.; Fung, A.K.; Ruf, C.; Sarabandi, K.; Zebker, H.A.; Van Zyl, J. Microwave Radar and Radiometric Remote Sensing, 4th ed.; University of Michigan Press: Ann Arbor, MI, USA, 2014; Number 5. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hammoud, B.; Faour, G.; Ayad, H.; Ndagijimana, F.; Jomaah, J. Performance Analysis of Detector Algorithms Using Drone-Based Radar Systems for Oil Spill Detection. Proceedings 2018, 2, 370. https://doi.org/10.3390/ecrs-2-05184
Hammoud B, Faour G, Ayad H, Ndagijimana F, Jomaah J. Performance Analysis of Detector Algorithms Using Drone-Based Radar Systems for Oil Spill Detection. Proceedings. 2018; 2(7):370. https://doi.org/10.3390/ecrs-2-05184
Chicago/Turabian StyleHammoud, Bilal, Ghaleb Faour, Hussam Ayad, Fabien Ndagijimana, and Jalal Jomaah. 2018. "Performance Analysis of Detector Algorithms Using Drone-Based Radar Systems for Oil Spill Detection" Proceedings 2, no. 7: 370. https://doi.org/10.3390/ecrs-2-05184
APA StyleHammoud, B., Faour, G., Ayad, H., Ndagijimana, F., & Jomaah, J. (2018). Performance Analysis of Detector Algorithms Using Drone-Based Radar Systems for Oil Spill Detection. Proceedings, 2(7), 370. https://doi.org/10.3390/ecrs-2-05184