Applying High-Resolution Visible-Channel Aerial Scan of Crop Canopy to Precision Irrigation Management †


Abstract
:1. Introduction
2. Materials and Methods
2.1. UAV Imaging System
2.2. Flight Campaigns
2.3. Data Processing
3. Results and Discussion
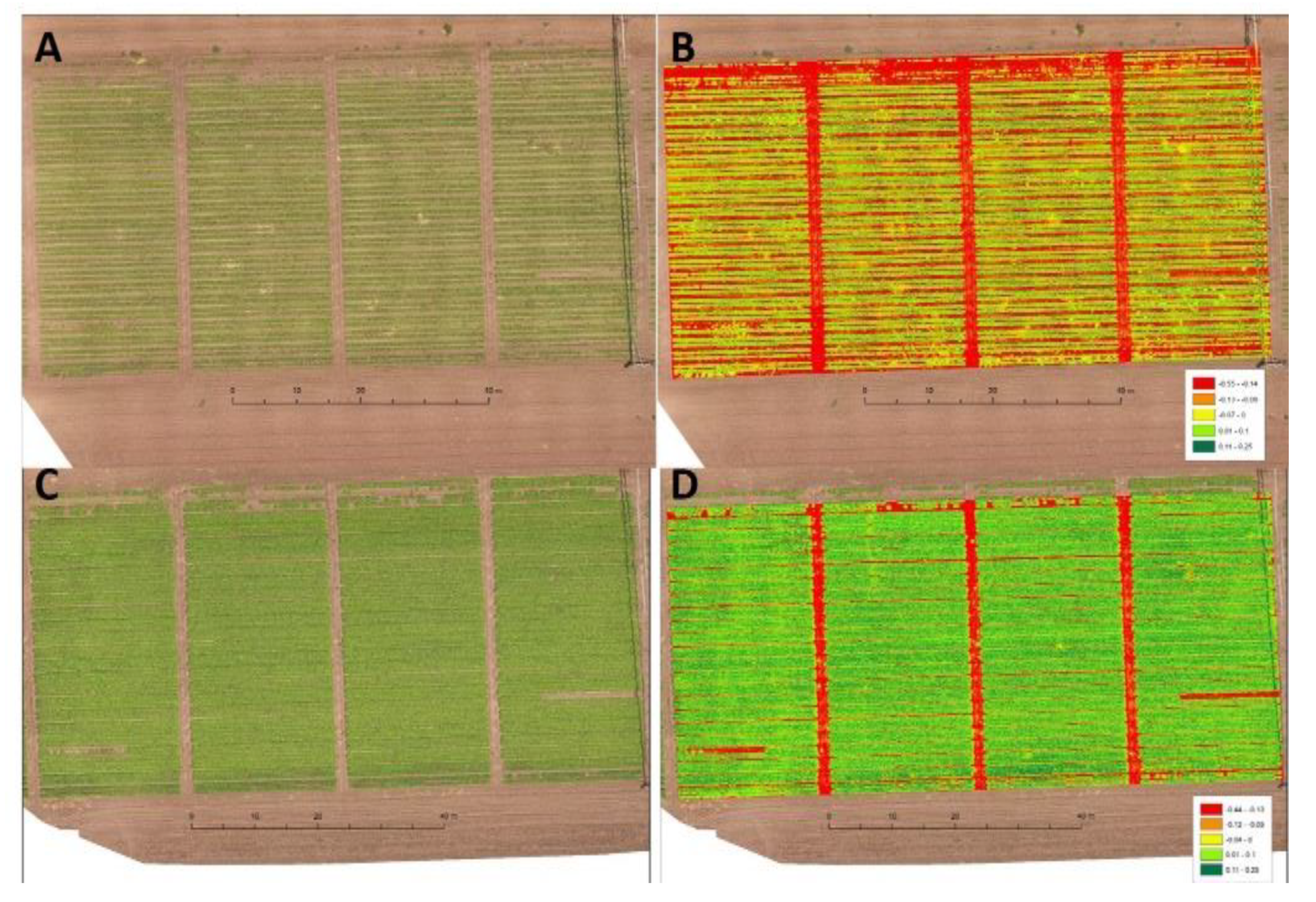
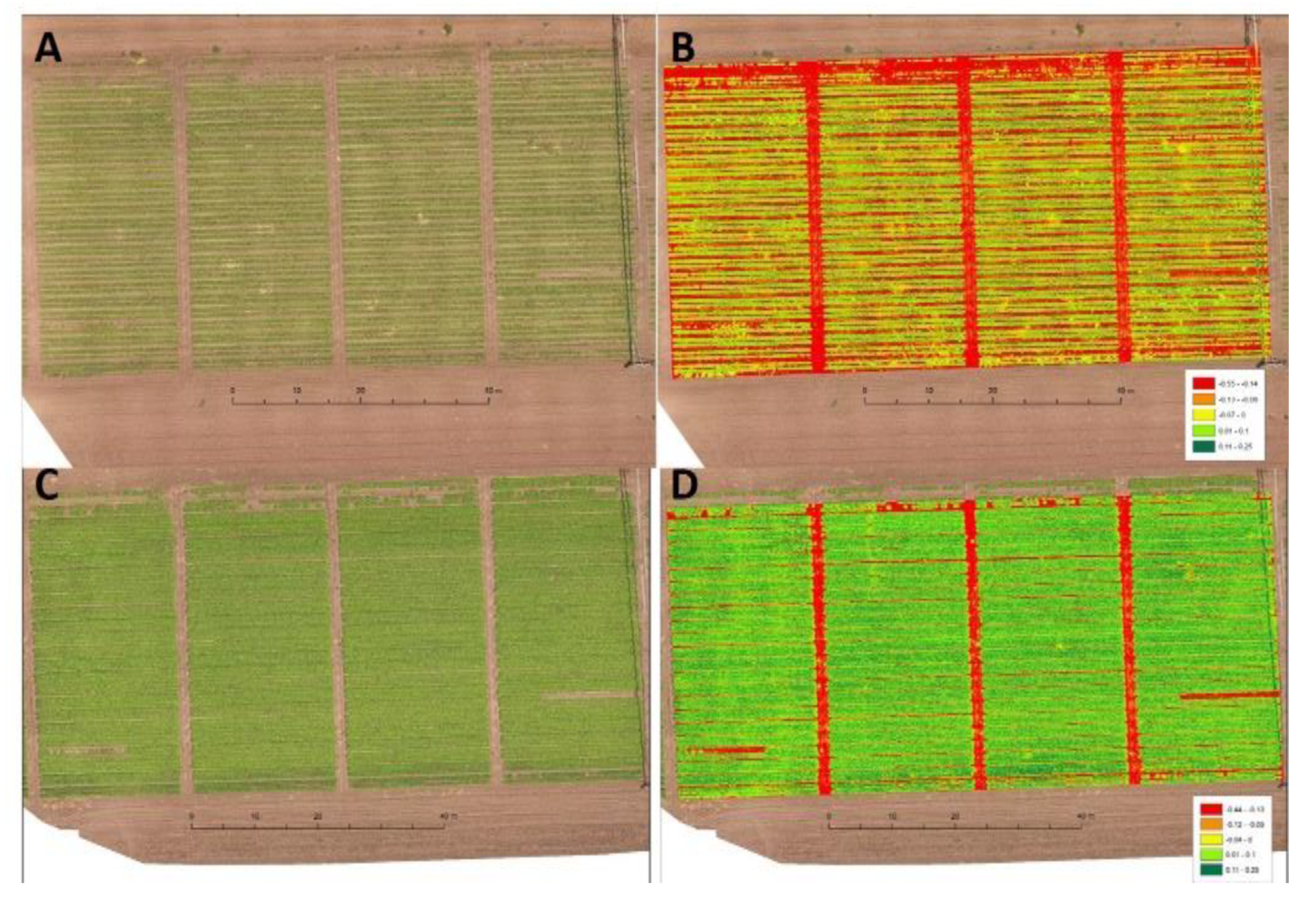
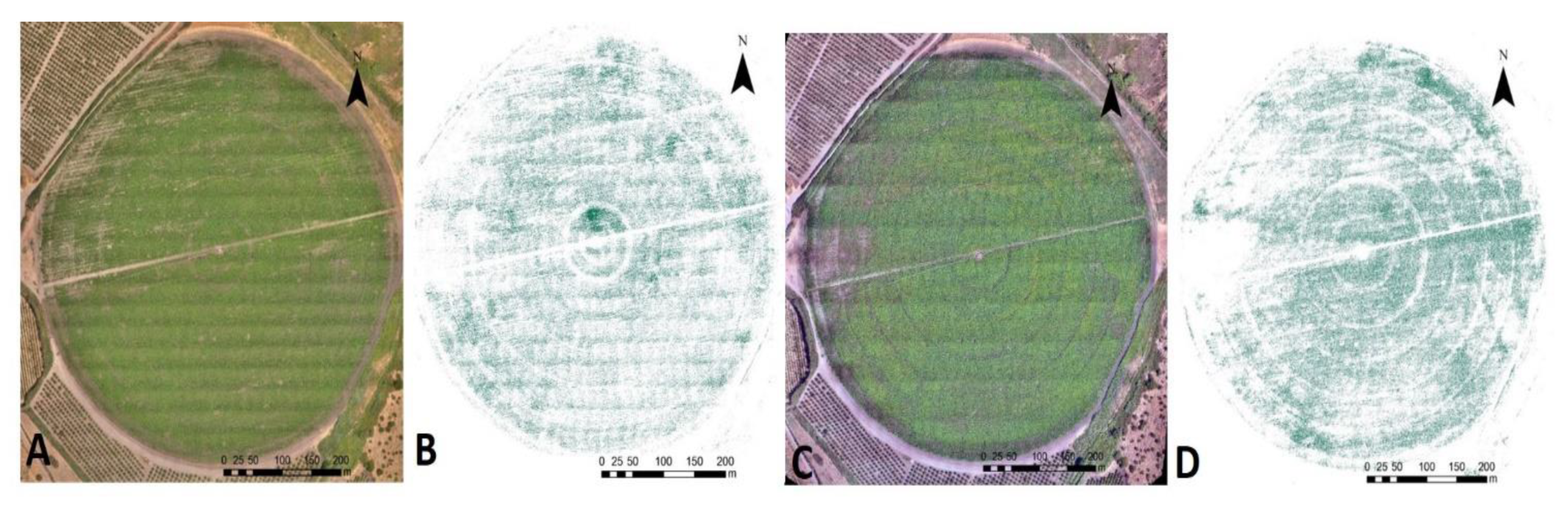
3.1. Havat Gadash Experimental Farm Campaign
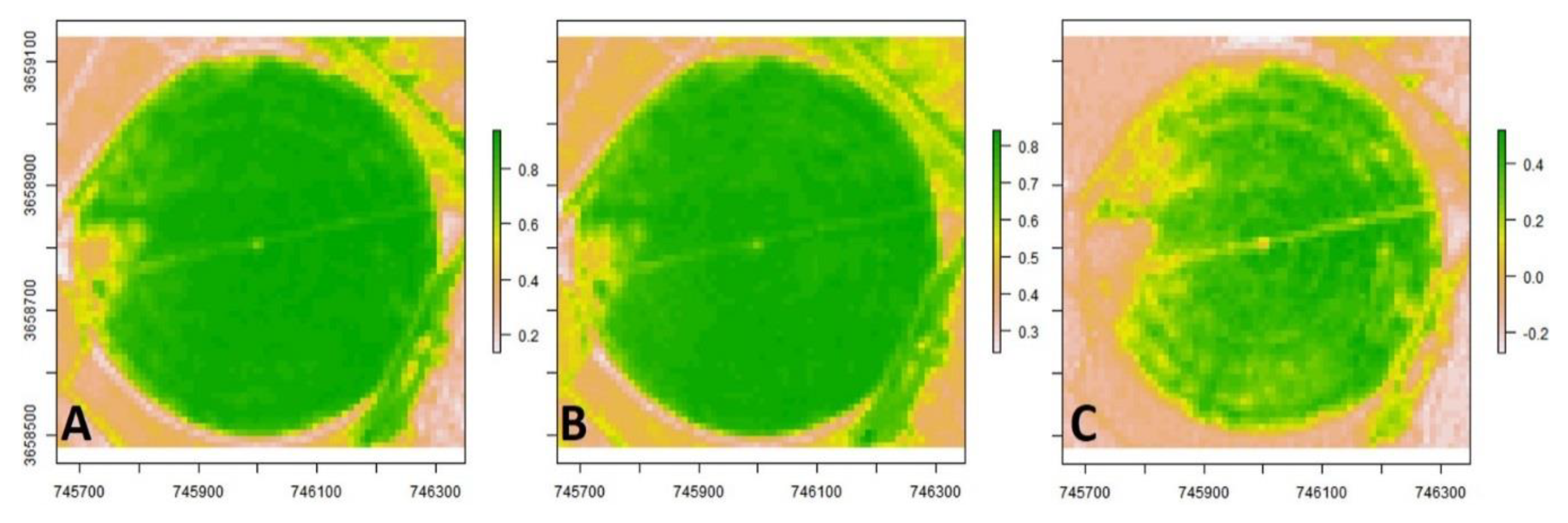
3.2. Comparison between NDVI and GRVI
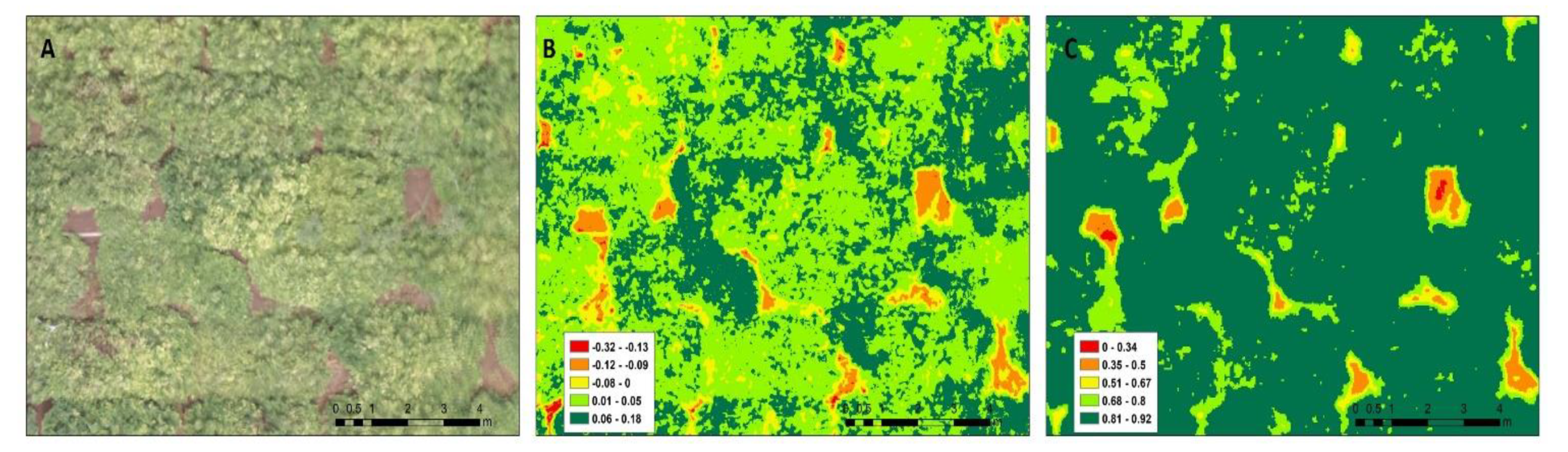
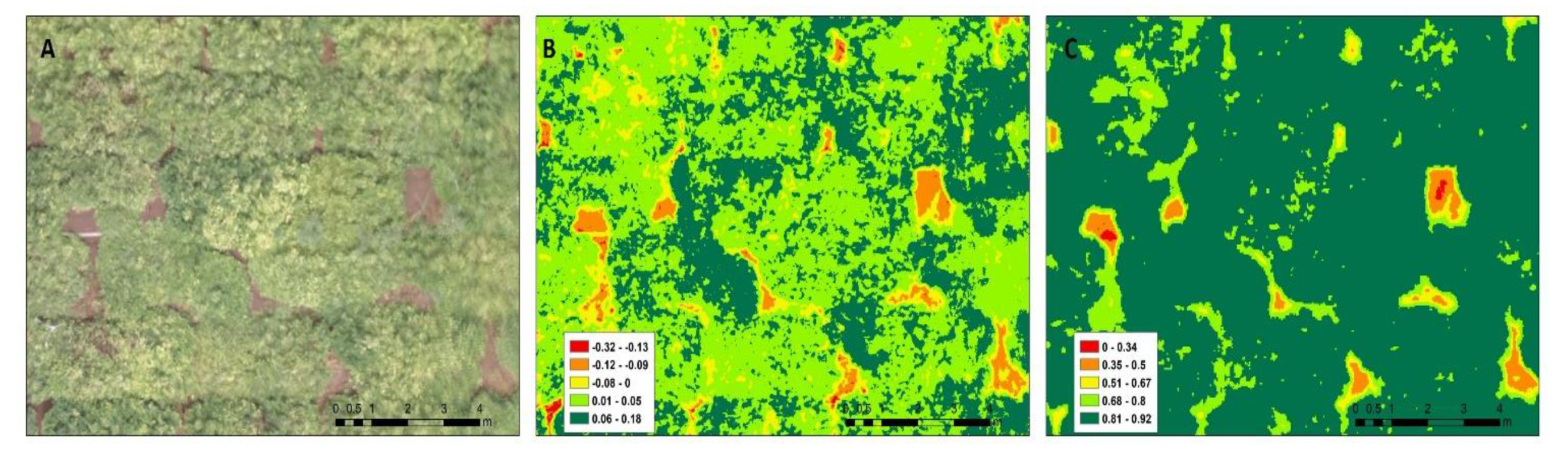
3.3. Gadot Test Site Campaign
3.4. Sentinel-2 Satellite VI of the Gadot Test Site
4. Conclusions
Acknowledgments
References
- Hatfield, J.L.; Gitelson, A.A.; Schepers, J.S.; Walthall, C.L. Application of spectral remote sensing for agronomic decisions. Agron. J. 2008, 100. [Google Scholar] [CrossRef]
- Hunt, E.R.; Doraiswamy, P.C.; McMurtrey, J.E.; Daughtry, C.S.T.; Perry, E.M.; Akhmedov, B. A visible band index for remote sensing leaf chlorophyll content at the Canopy scale. Int. J. Appl. Earth Obs. Geoinf. 2012, 21, 103–112. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of Leaf-Area Index from Quality of Light on the Forest Floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Rouse, J.W.; Hass, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the great plains with ERTS. Third Earth Resour. Technol. Satell. (ERTS) Symp. 1973, 1, 309–317. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Hunt, E.R.; Daughtry, C.S.T.; Eitel, J.U.H.; Long, D.S. Remote sensing leaf chlorophyll content using a visible band index. Agron. J. 2011, 103, 1090–1099. [Google Scholar] [CrossRef]
- Yoder, B.J.; Waring, R.H. The normalized difference vegetation index of small Douglas-fir canopies with varying chlorophyll concentrations. Remote Sens. Environ. 1994, 49, 81–91. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Viña, A.; Ciganda, V.; Rundquist, D.C.; Arkebauer, T.J. Remote estimation of canopy chlorophyll content in crops. Geophys. Res. Lett. 2005, 32, 1–4. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; De Colstoun, E.B.; McMurtrey Iii, J.E. Estimating Corn Leaf Chlorophyll Concentration from Leaf and Canopy Reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Eitel, J.U.H.; Long, D.S.; Gessler, P.E.; Hunt, E.R.; Brown, D.J. Sensitivity of Ground-Based Remote Sensing Estimates of Wheat Chlorophyll Content to Variation in Soil Reflectance. Soil Sci. Soc. Am. J. 2009, 73, 1715–1723. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens.Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef]
- Adamsen, F.J.; Pinter, P.J.; Barnes, E.M.; LaMorte, R.L.; Wall, G.W.; Leavitt, S.W.; Kimball, B.A. Measuring wheat senescence with a digital camera. Crop. Sci. 1999, 39, 719–724. [Google Scholar] [CrossRef]
- Kanemasu, E.T. Seasonal canopy reflectance patterns of wheat, sorghum, and soybean. Remote Sens. Environ. 1974, 3, 43–47. [Google Scholar] [CrossRef]
- Motohka, T.; Nasahara, K.N.; Oguma, H.; Tsuchida, S. Applicability of Green-Red Vegetation Index for remote sensing of vegetation phenology. Remote Sens. 2010, 2, 2369–2387. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration (Guidelines for Computing Crop Water Requirements), FAO Irrigation and Drainage Paper No. 56; FAO: Rome, Italy, 1998; Volume 290. [Google Scholar] [CrossRef]
- Johnson, R.S.; Ayars, J.; Trout, T.; Mead, R.; Phene, C. Crop coefficients for mature peach trees are well correlated with midday canopy light interception. Acta Hortic. 2000, 537, 455–460. [Google Scholar] [CrossRef]
- Green, S.; McNaughton, K.; Wünsche, J.N.; Clothier, B. Modeling Light Interception and Transpiration of Apple Tree Canopies. Agron. J. 2003, 95, 1380. [Google Scholar] [CrossRef]
- Meron, M.; Tsipris, J.; Hetsroni, A.; Cohen, S. Aerial photography and ground based equipment to evaluate crop cover for tree specific irrigation scheduling. In In Proceedings of the 8th International Conference on Precision Agriculture, Minneapolis, MN, USA, D., Ed., 23–26 July 2006; Mulla. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Cumulative ET (mm) * | Irrigation (mm) | Cumulative Irrigation (mm) * | Kc ** | |
|---|---|---|---|---|---|
| Uniform irrigation | 04/06/2017 | 170 | 40 | 40 | 0.23 |
| 13/06/2017 | 230 | 40 | 80 | 0.35 | |
| 29/06/2017 | 342 | 45 | 125 | 0.37 | |
| 06/07/2017 | 389 | 45 | 170 | 0.44 | |
| 12/07/2017 | 432 | 45 | 215 | 0.50 | |
| 0.7 Kc Irrigation | 19/07/2017 | 43 | 37 | 37 | 0.86 |
| 27/07/2017 | 96 | 37 | 74 | 0.77 | |
| 03/08/2017 | 143 | 37 | 111 | 0.78 | |
| 10/08/2017 | 186 | 37 | 148 | 0.80 | |
| 19/08/2017 | 240 | 37 | 185 | 0.77 | |
| 30/08/2017 | 308 | 37 | 222 | 0.72 | |
| 10/09/2017 | 369 | 37 | 259 | 0.70 | |
| 24/09/2017 | 434 | 40 | 299 | 0.69 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, A.; Orlov-Levin, V.; Meron, M. Applying High-Resolution Visible-Channel Aerial Scan of Crop Canopy to Precision Irrigation Management. Proceedings 2018, 2, 335. https://doi.org/10.3390/ecrs-2-05148
Chen A, Orlov-Levin V, Meron M. Applying High-Resolution Visible-Channel Aerial Scan of Crop Canopy to Precision Irrigation Management. Proceedings. 2018; 2(7):335. https://doi.org/10.3390/ecrs-2-05148
Chicago/Turabian StyleChen, Assaf, Valerie Orlov-Levin, and Moshe Meron. 2018. "Applying High-Resolution Visible-Channel Aerial Scan of Crop Canopy to Precision Irrigation Management" Proceedings 2, no. 7: 335. https://doi.org/10.3390/ecrs-2-05148
APA StyleChen, A., Orlov-Levin, V., & Meron, M. (2018). Applying High-Resolution Visible-Channel Aerial Scan of Crop Canopy to Precision Irrigation Management. Proceedings, 2(7), 335. https://doi.org/10.3390/ecrs-2-05148