Sentinel-1 Data Border Noise Removal and Seamless Synthetic Aperture Radar Mosaic Generation †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Mosaic Methodology
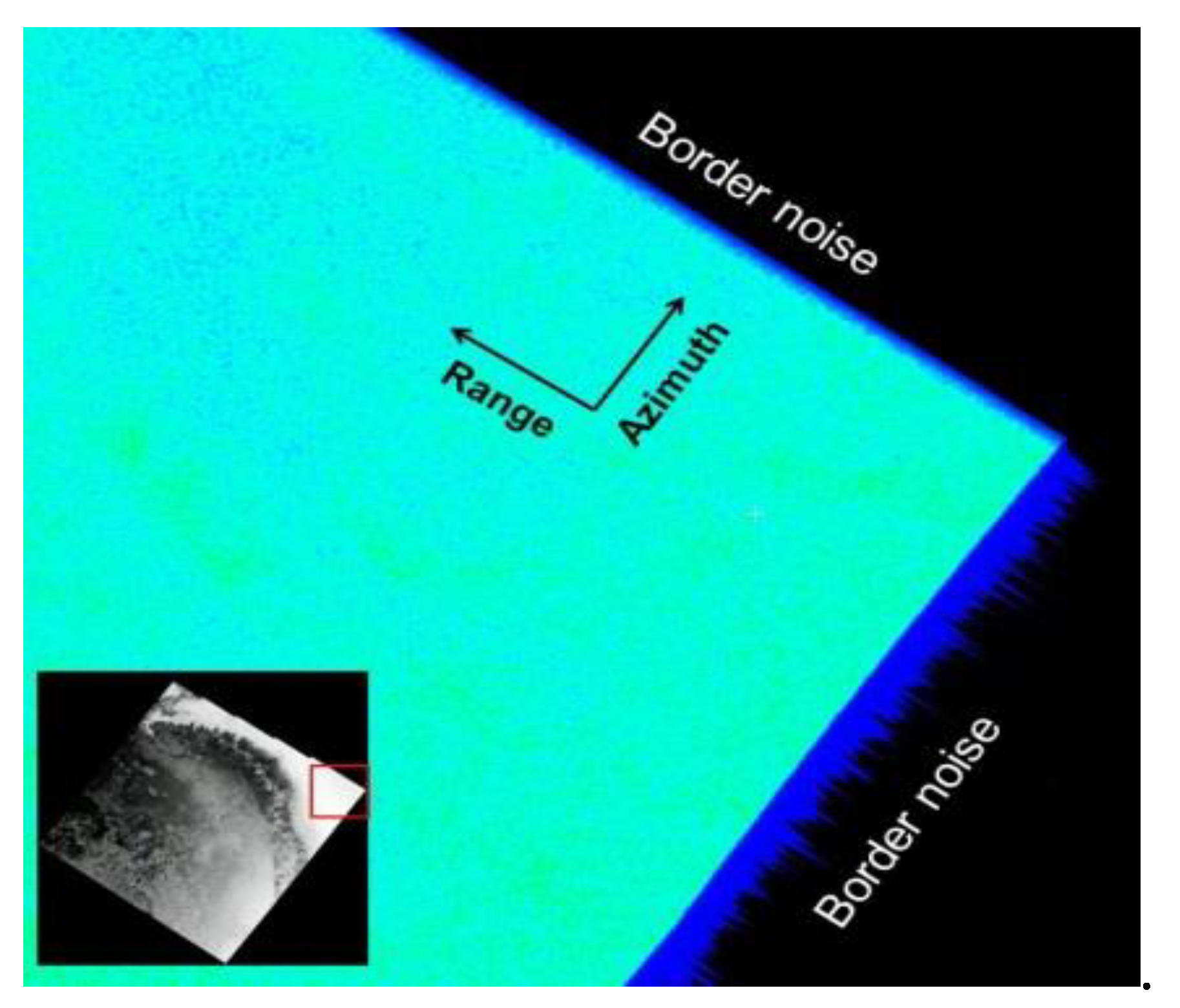
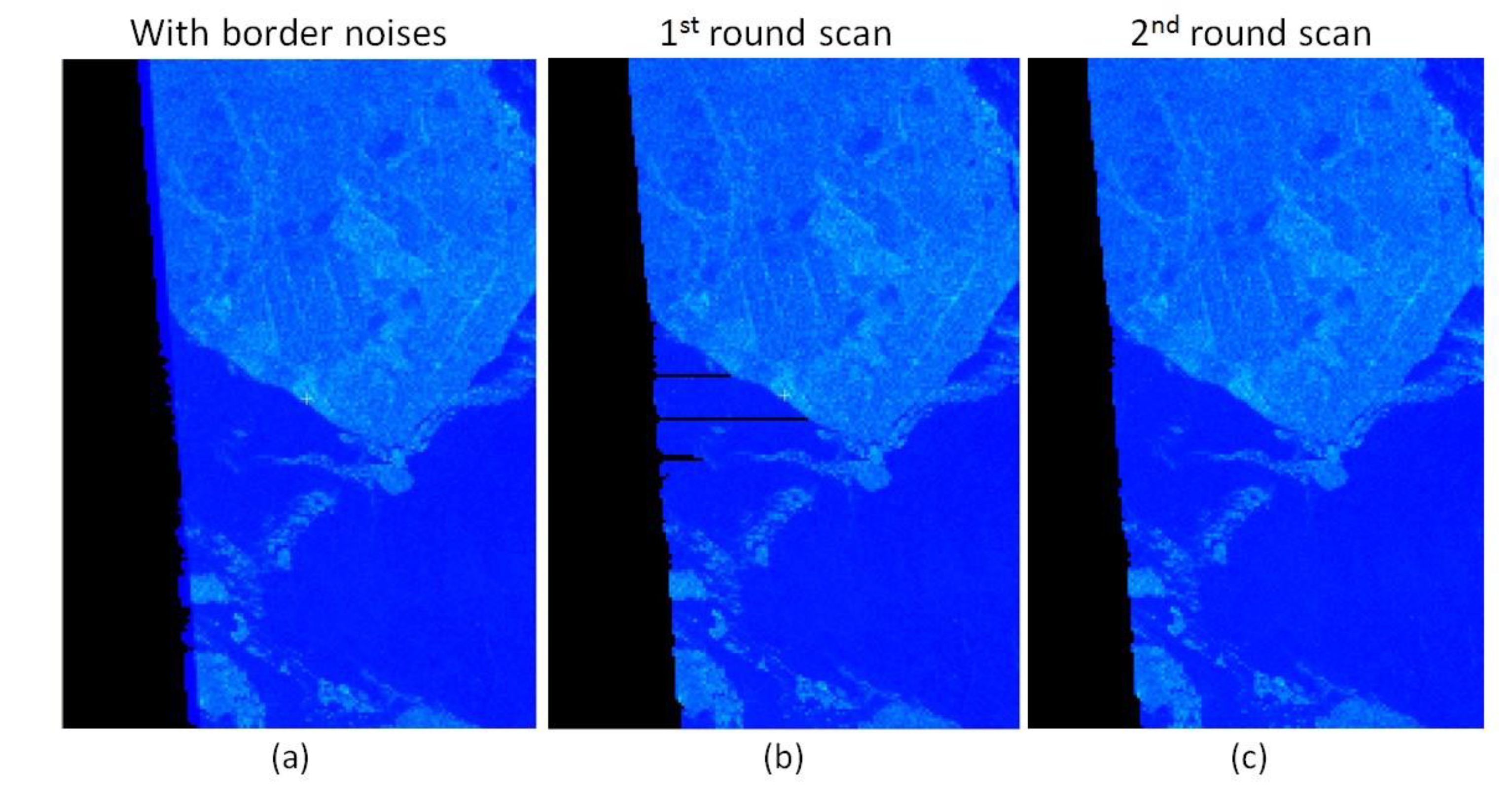
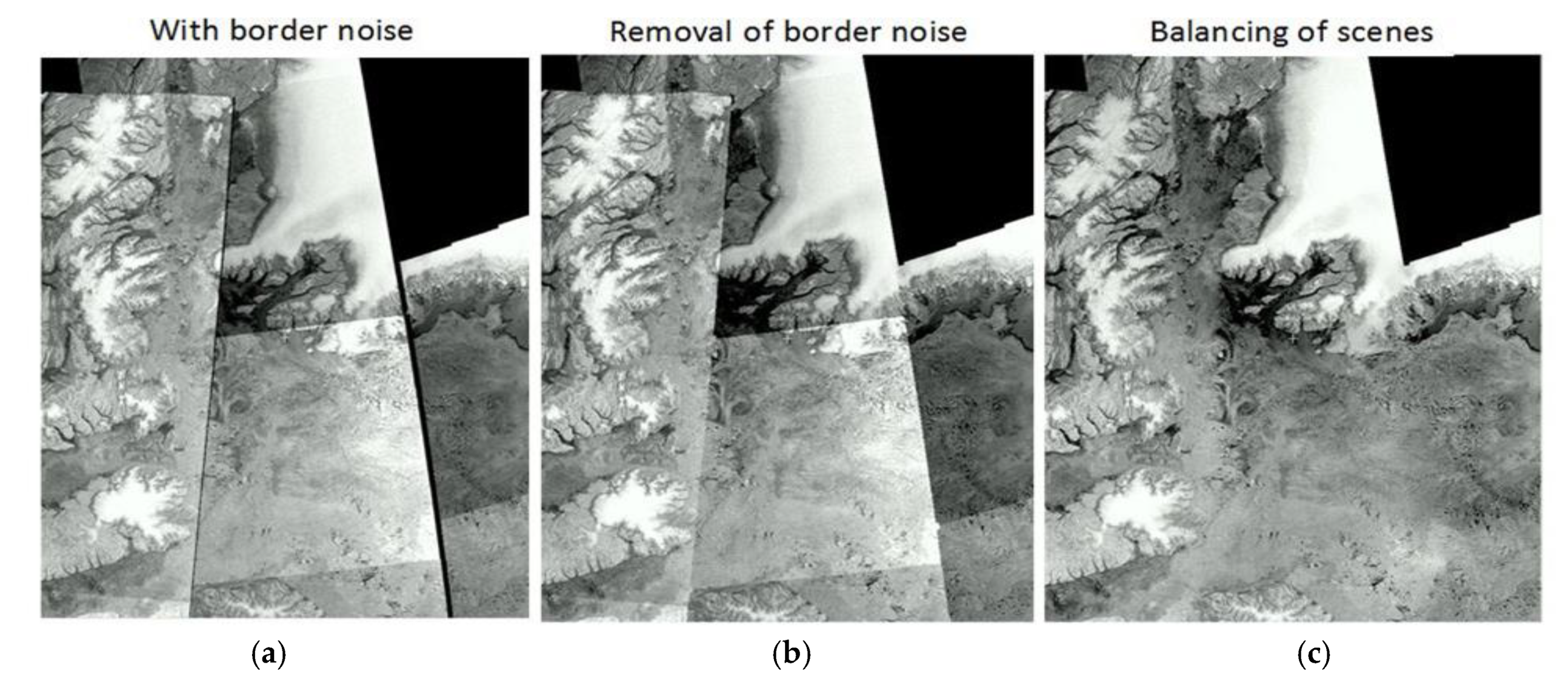
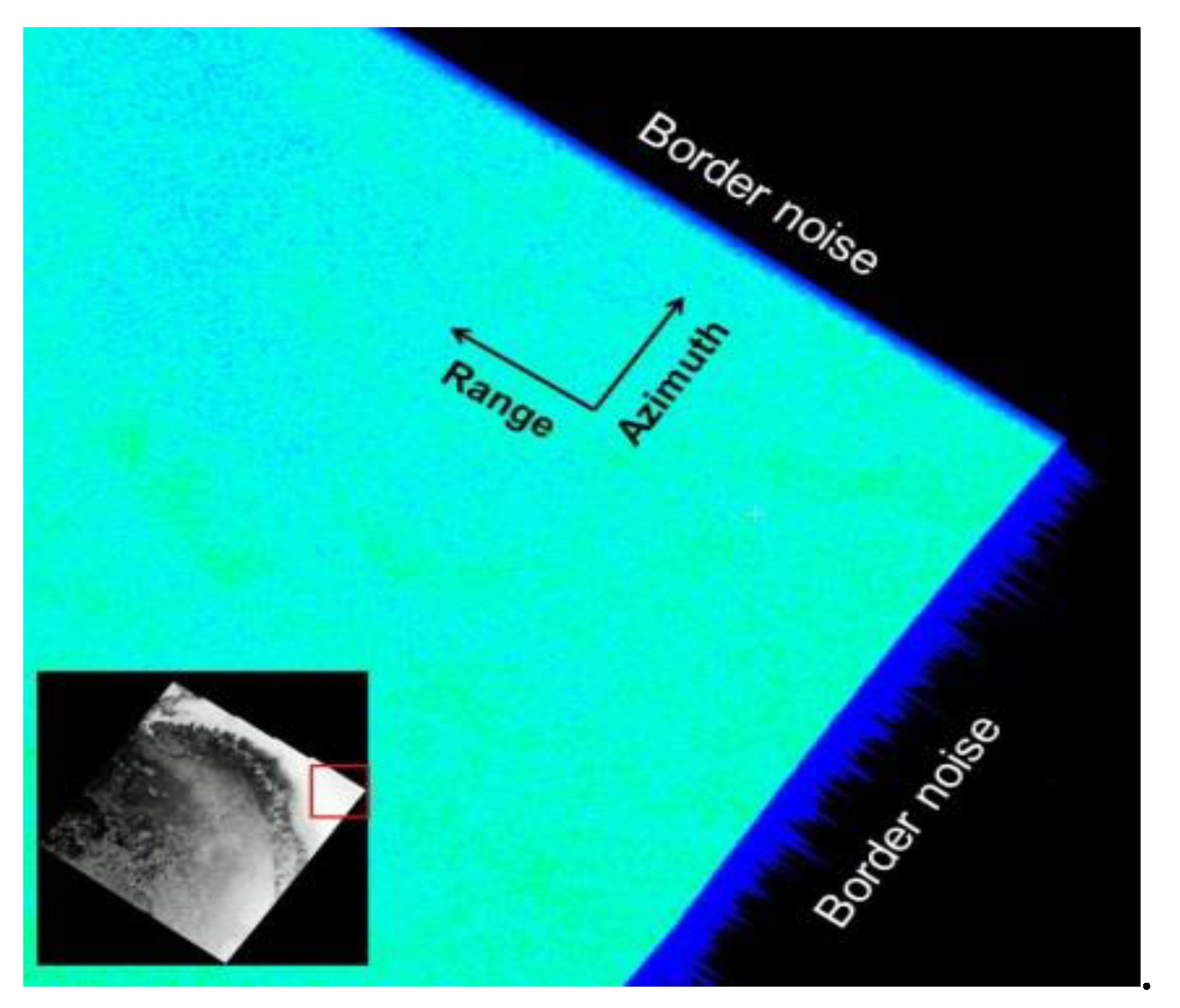
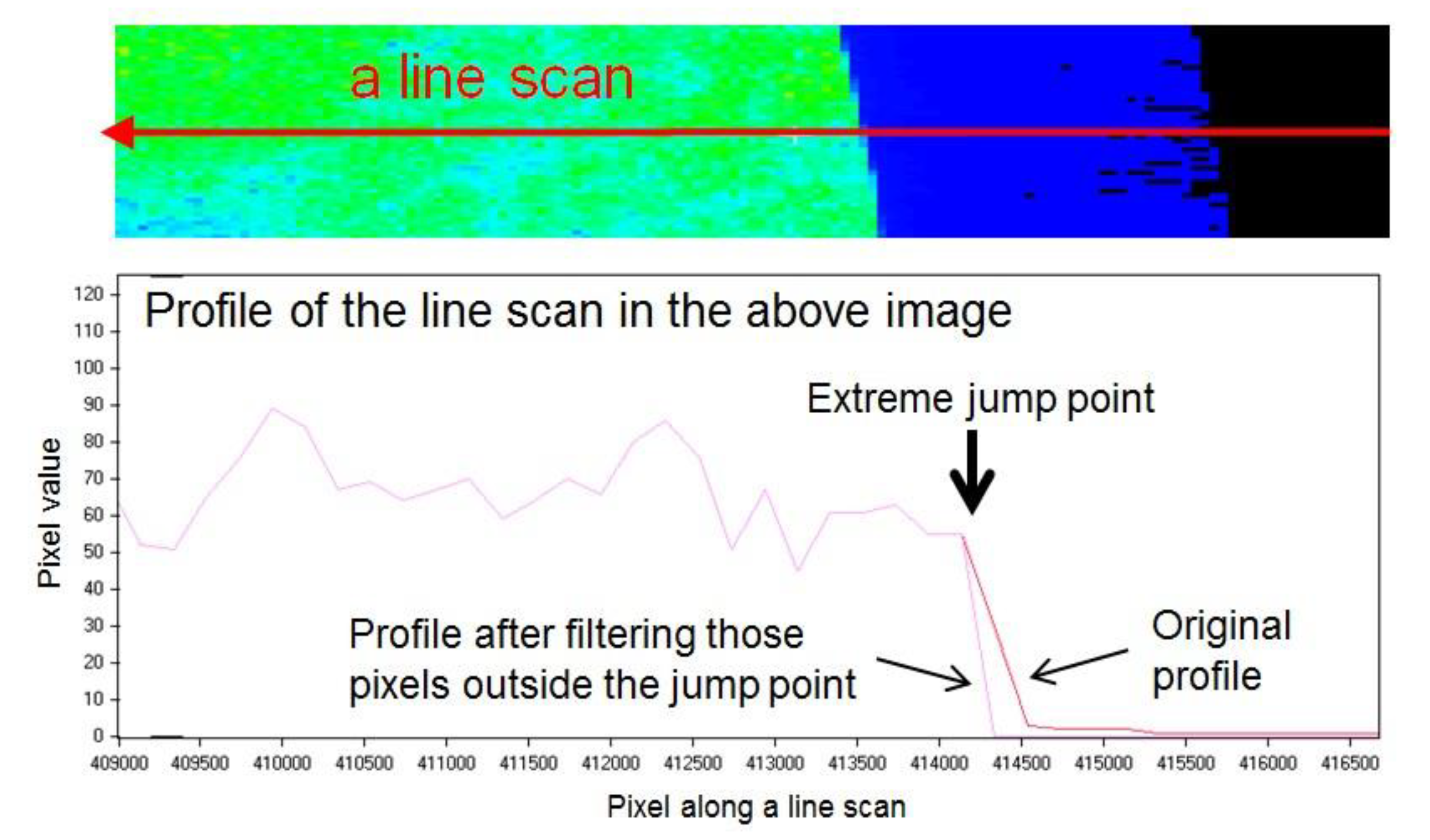
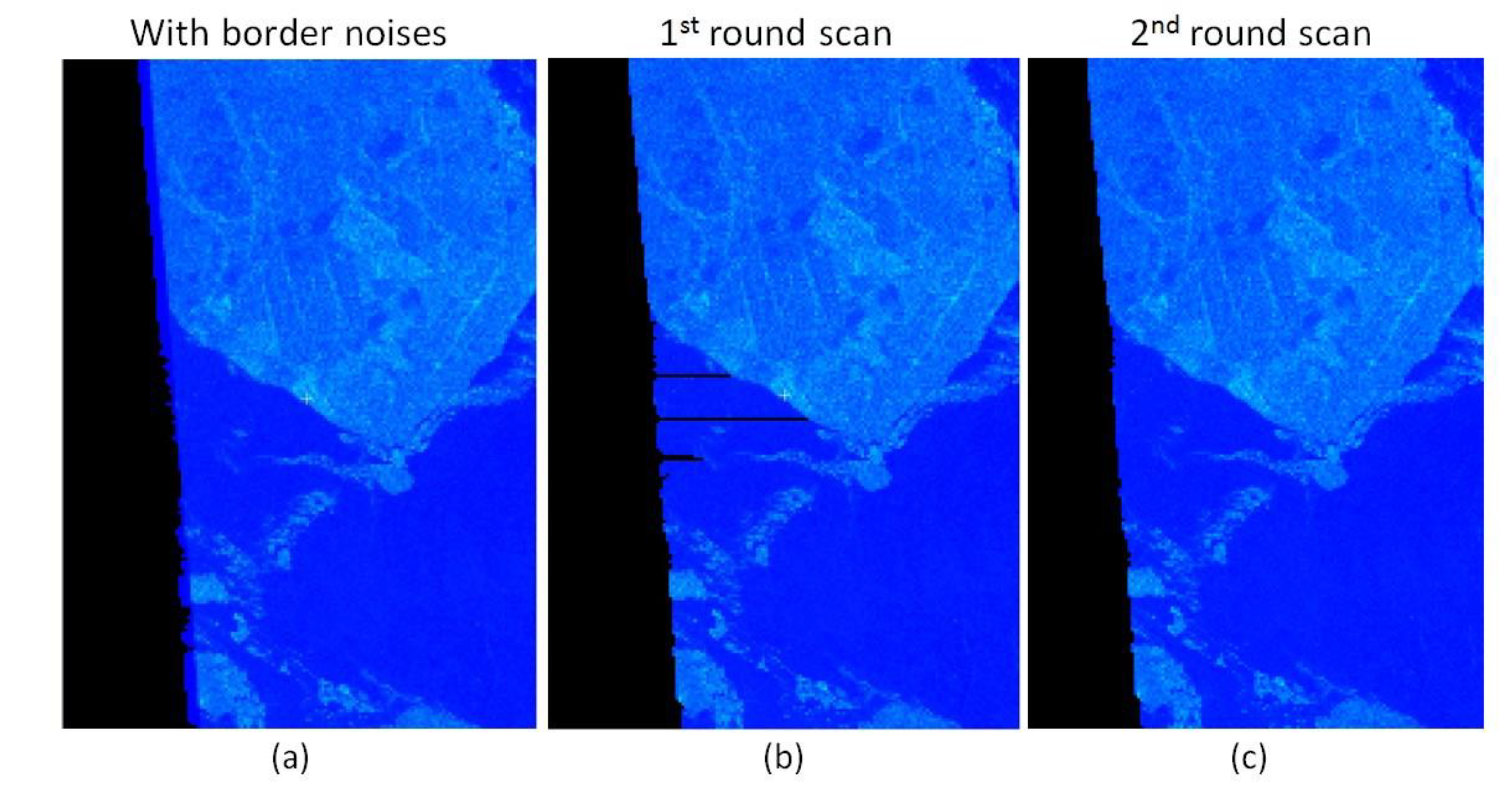
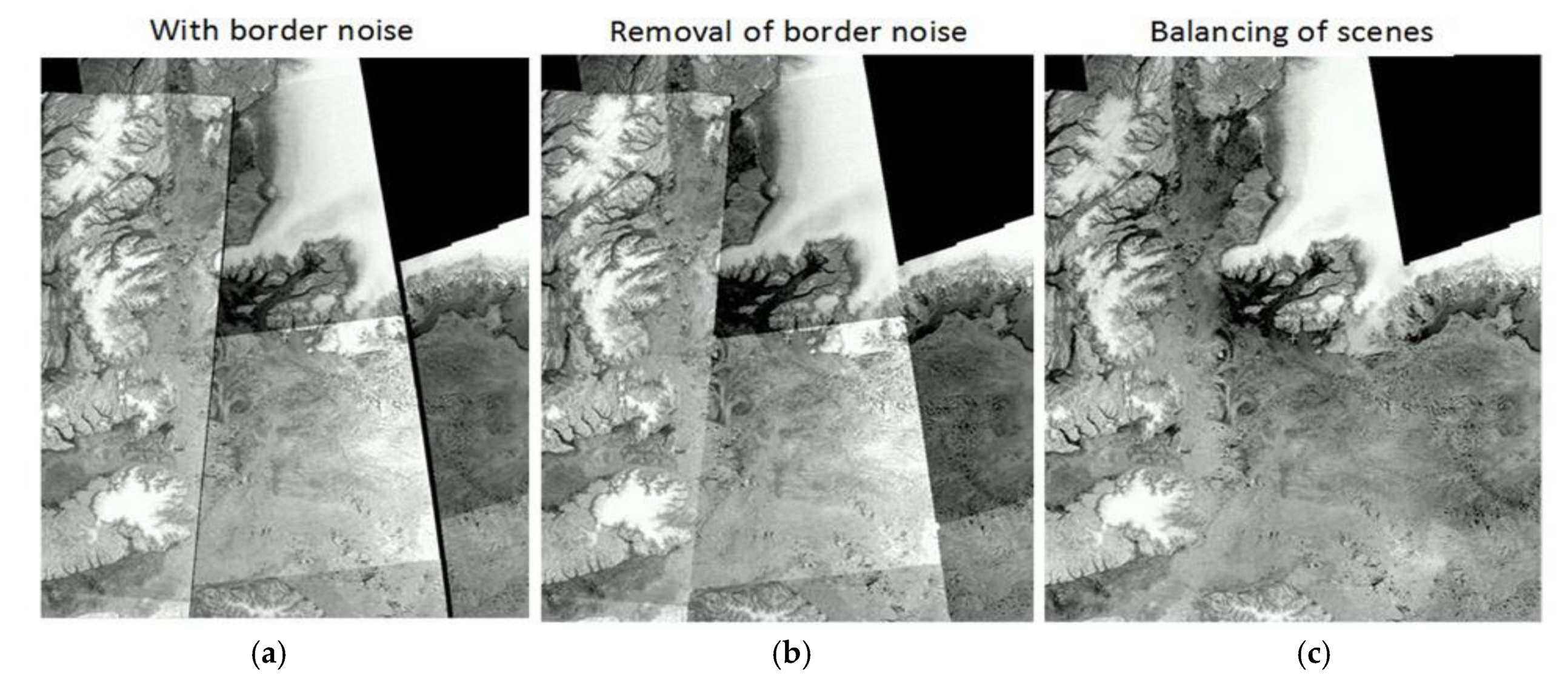
2.1. Border Noise Removal
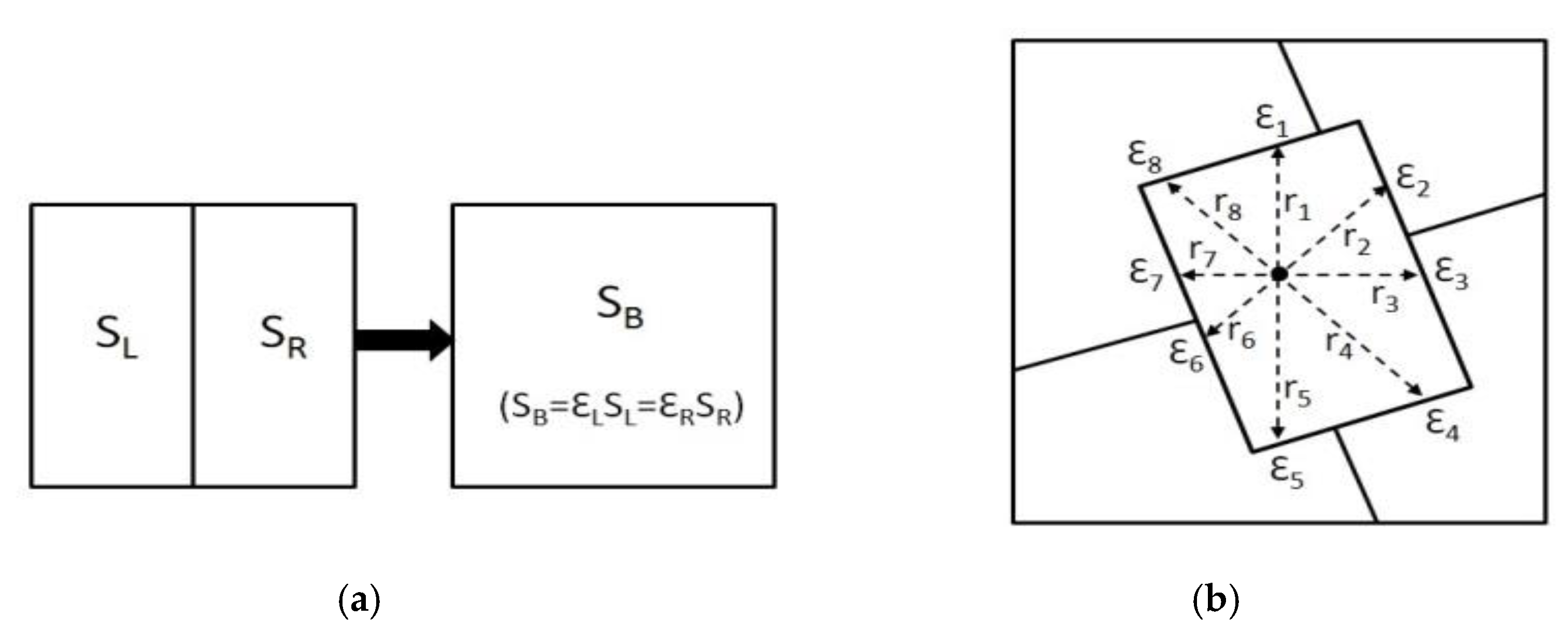
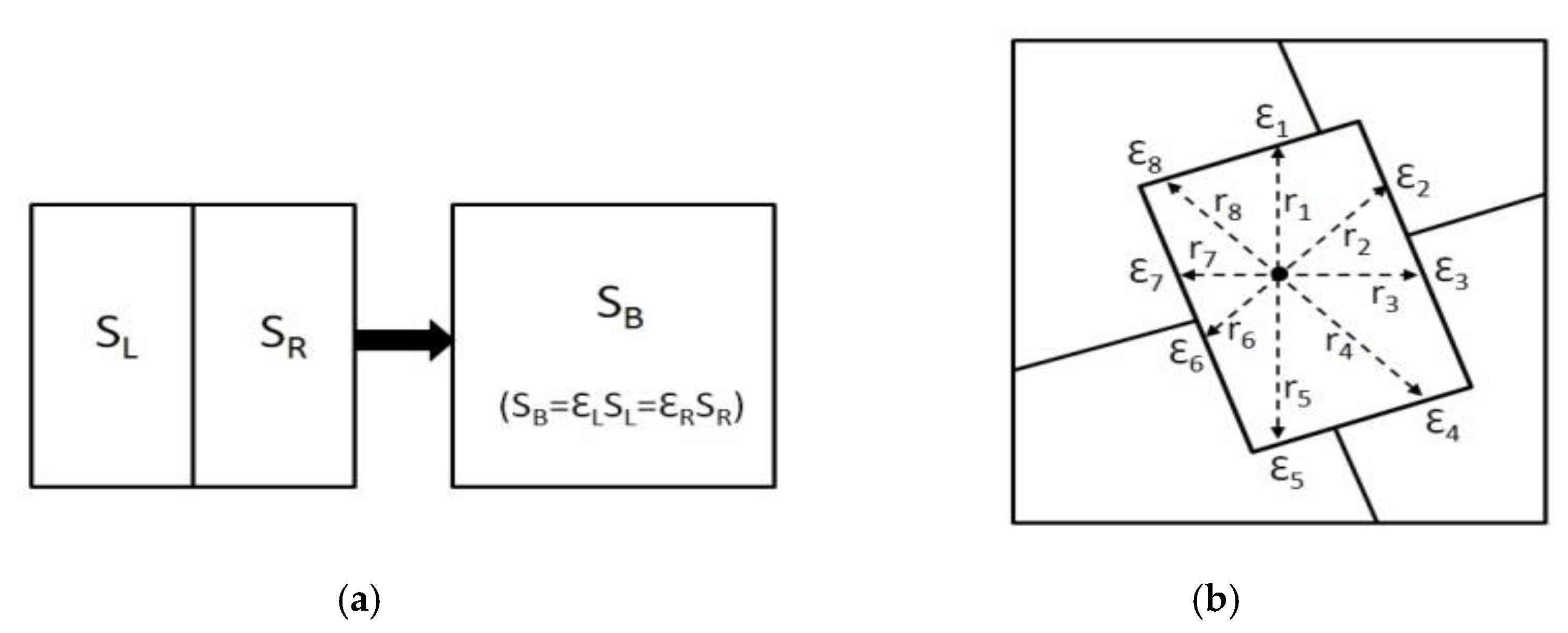
2.2. Tone-Balanced Mosaic Generation
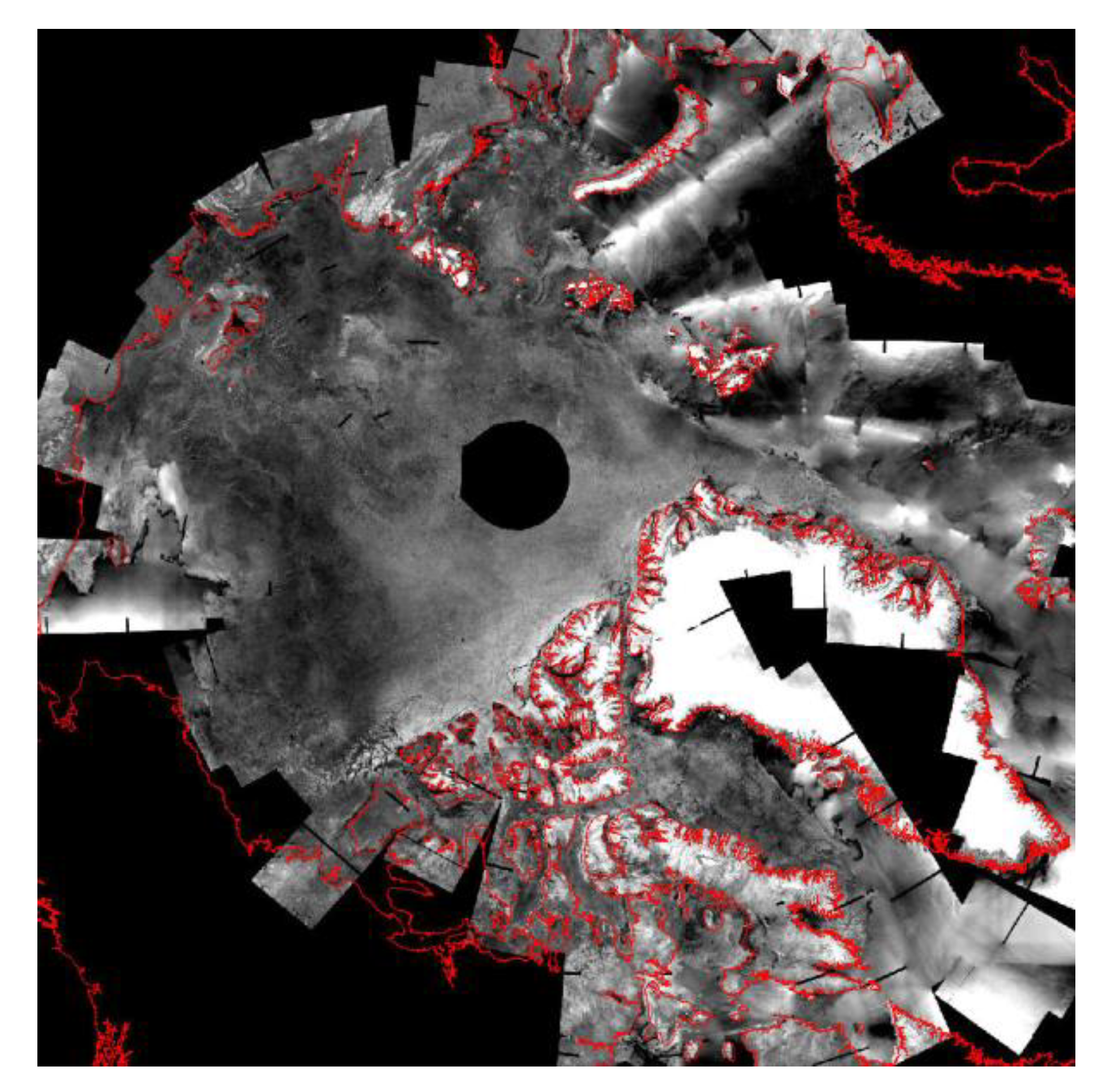
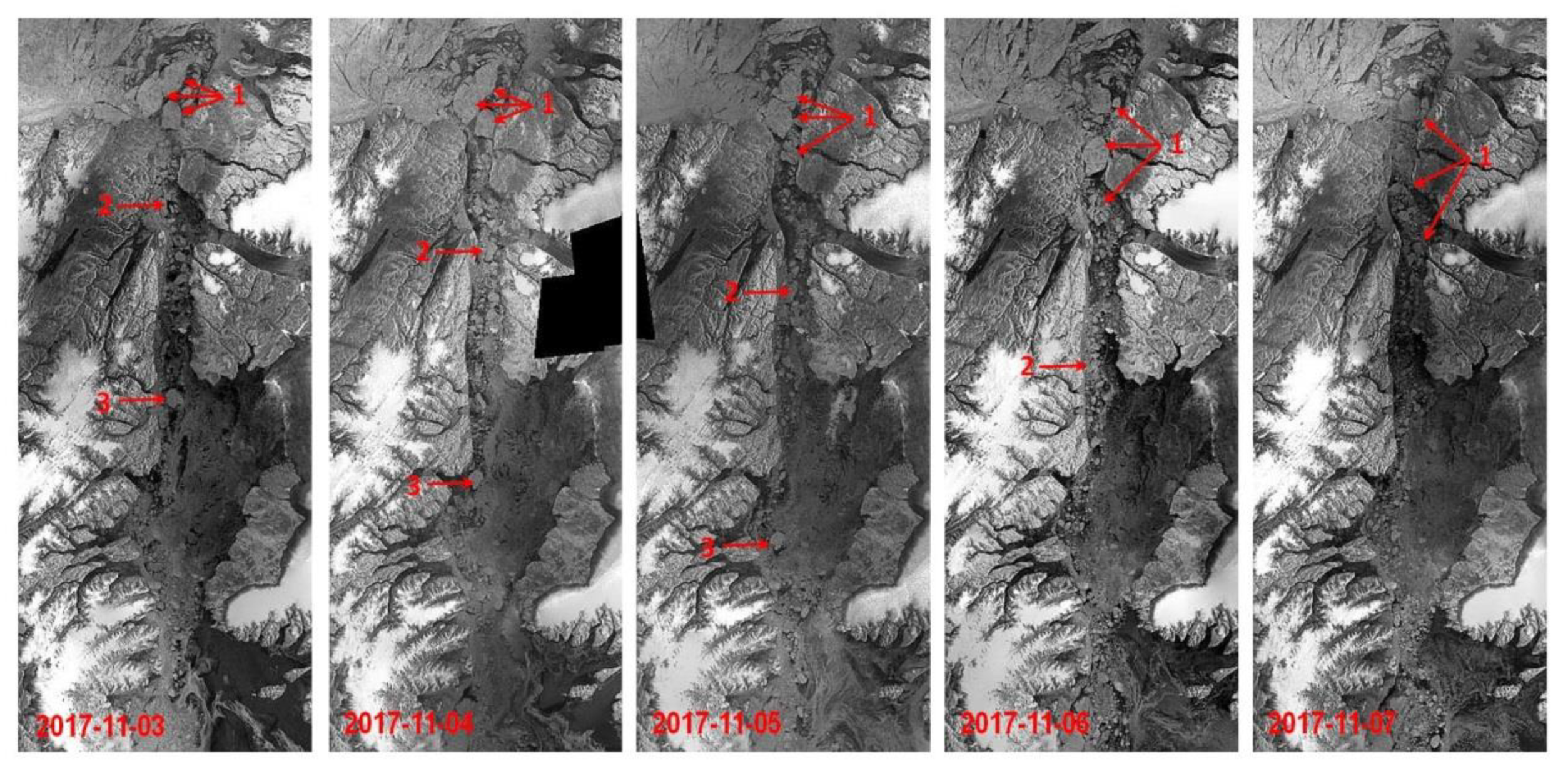
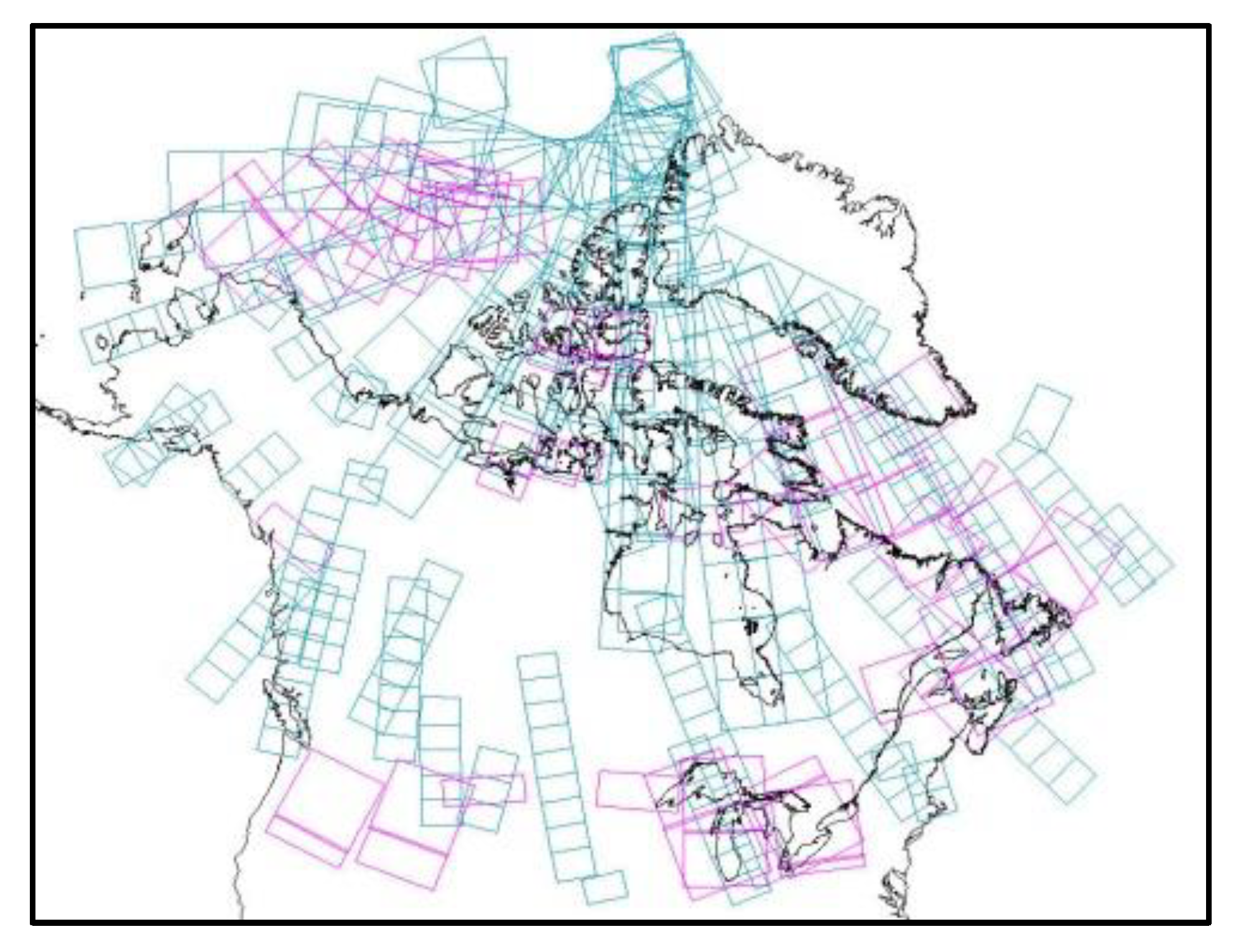
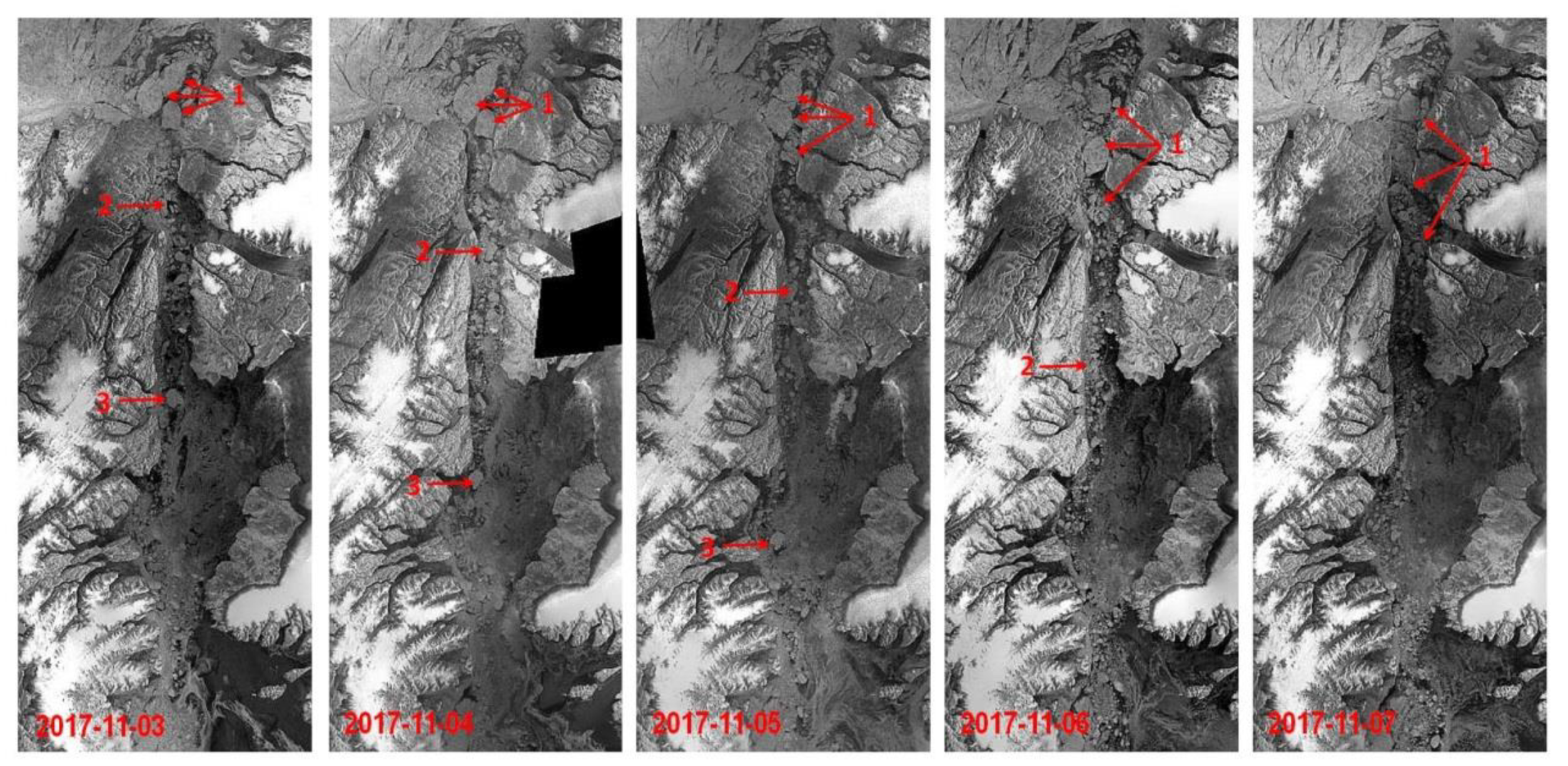
3. Mosaic Results and Applications
4. Concluding Remarks
Conflicts of Interest
References
- Shimada, M.; Itoh, T.; Motohka, T.; Watanabe, M.; Shiraishi, T.; Thapa, R.; Lucas, R. New global forest/non-forest maps from ALOS PALSAR data (2007–2010). Remote Sens. Environ. 2014, 155, 13–31. [Google Scholar] [CrossRef]
- Zhang, L.; Guo, H.; Liu, G.; Fu, W.; Yan, S.; Song, R.; Ji, P.; Wang, X. SAR China Land Mapping Project: Development, Production and Potential Applications. IOP Conf. Ser. Earth Environ. Sci. 2014, 17, 12229. [Google Scholar] [CrossRef]
- Luo, Y.; De Abreu, R. Operational RADARSAT-2 Image Mosaicking for the Canadian Arctic. In Proceedings of the 3rd Workshop on RADARSAT-2, Saint-Hubert, QC, Canada, 27 September 2010. [Google Scholar]
- RADARSAT Mosaics, Canadian Ice Service, Environment and Climate Change Canada. Available online: https://www.canada.ca/en/environment-climate-change/services/ice-forecasts-observations/latest-conditions/products-guides/satellite-images-mosaics-animations.html (accessed on 1 February 2018).
- Sentinel Application Platform (SNAP), European Space Agency. Available online: http://step.esa.int/main/toolboxes/snap/ (accessed on 1 February 2018).
- Ali, I.; Cao, S.; Naeimi, V.; Paulik, C.; Wagner, W. Methods to remove the border noise from Sentinel-1 Synthetic Aperture Radar data: Implications and importance for time-series analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 99, 1–10. [Google Scholar] [CrossRef]
- Dyatmika, H.S.; Sambodo, K.A.; Budiono, M.E.; Hendayani. Noise removal using thresholding and segmentation for random noise Sentinel-1 data. IOP Conf. Ser. Earth Environ. Sci. 2017, 54. [Google Scholar] [CrossRef]
- Annual Arctic Ice Atlas: Winter 2015–2016, Canadian Ice Service. Available online: https://www.canada.ca/en/environment-climate-change/services/ice-forecasts-observations/publications/annual-arctic-atlas-winter-2015-2016.html (accessed on 1 February 2018).
- Canada from Space, Canadian Space Agency. Available online: http://www.asc-csa.gc.ca/eng/search/images/watch.asp?id=2572 (accessed on 1 February 2018).
- Giant Floor Map: Canada from Space, Canadian Geographic Education. Available online: http://www.canadiangeographic.com/educational_products/canada_from_space_map.asp (accessed on 1 February 2018).
- Luo, Y.; De Abreu, R. Data fusion of RADARSAT and MODIS images for Arctic sea ice mapping. In Proceedings of the American Meteorological Society Annual Meeting, Seattle, WA, USA, 22–27 January 2011. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Y.; Flett, D. Sentinel-1 Data Border Noise Removal and Seamless Synthetic Aperture Radar Mosaic Generation. Proceedings 2018, 2, 330. https://doi.org/10.3390/ecrs-2-05143
Luo Y, Flett D. Sentinel-1 Data Border Noise Removal and Seamless Synthetic Aperture Radar Mosaic Generation. Proceedings. 2018; 2(7):330. https://doi.org/10.3390/ecrs-2-05143
Chicago/Turabian StyleLuo, Yi, and Dean Flett. 2018. "Sentinel-1 Data Border Noise Removal and Seamless Synthetic Aperture Radar Mosaic Generation" Proceedings 2, no. 7: 330. https://doi.org/10.3390/ecrs-2-05143
APA StyleLuo, Y., & Flett, D. (2018). Sentinel-1 Data Border Noise Removal and Seamless Synthetic Aperture Radar Mosaic Generation. Proceedings, 2(7), 330. https://doi.org/10.3390/ecrs-2-05143