In-Plane Sensitive Magnetoresistors as a Hall Device †


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
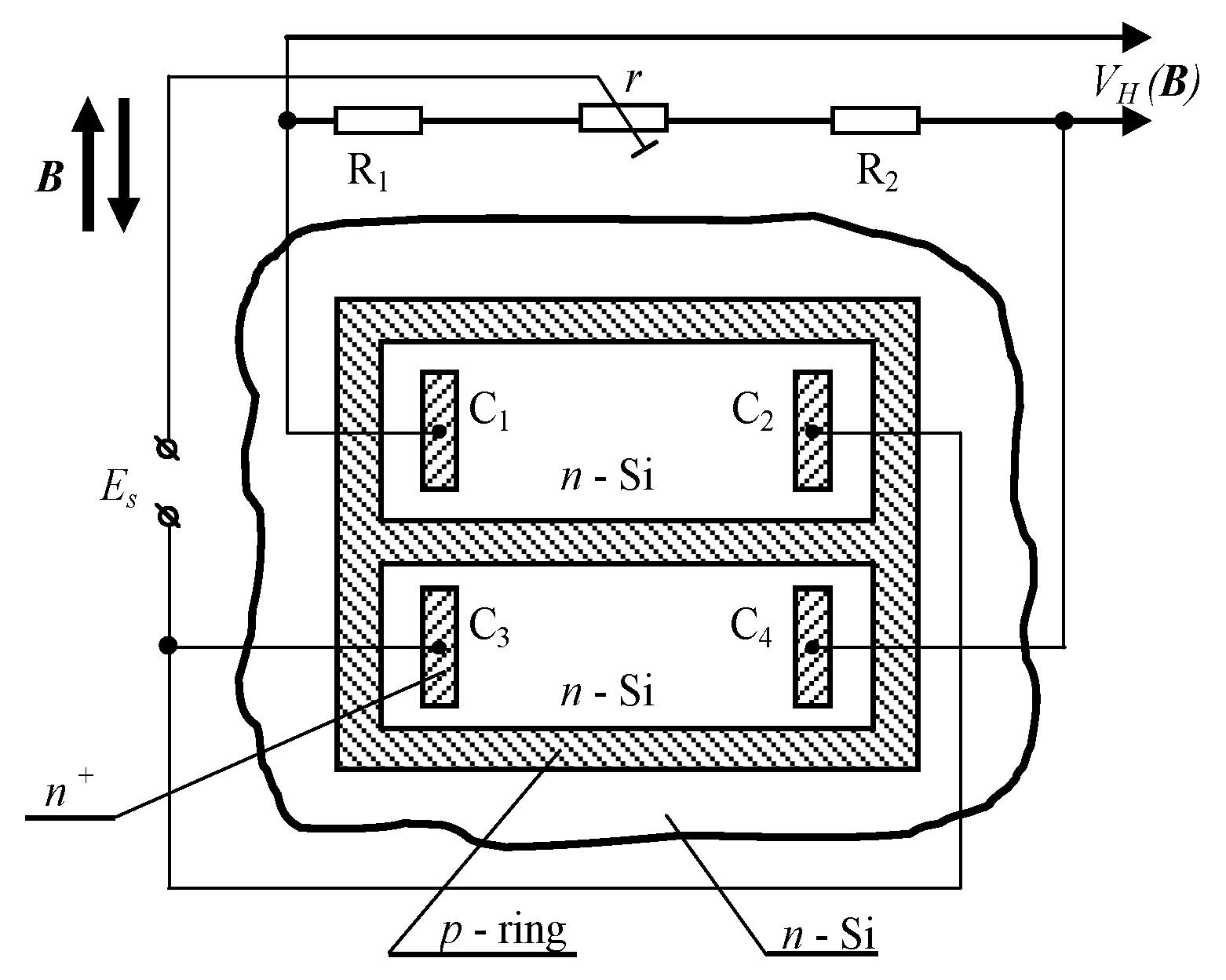
2. Sensor Design and Operation Principle
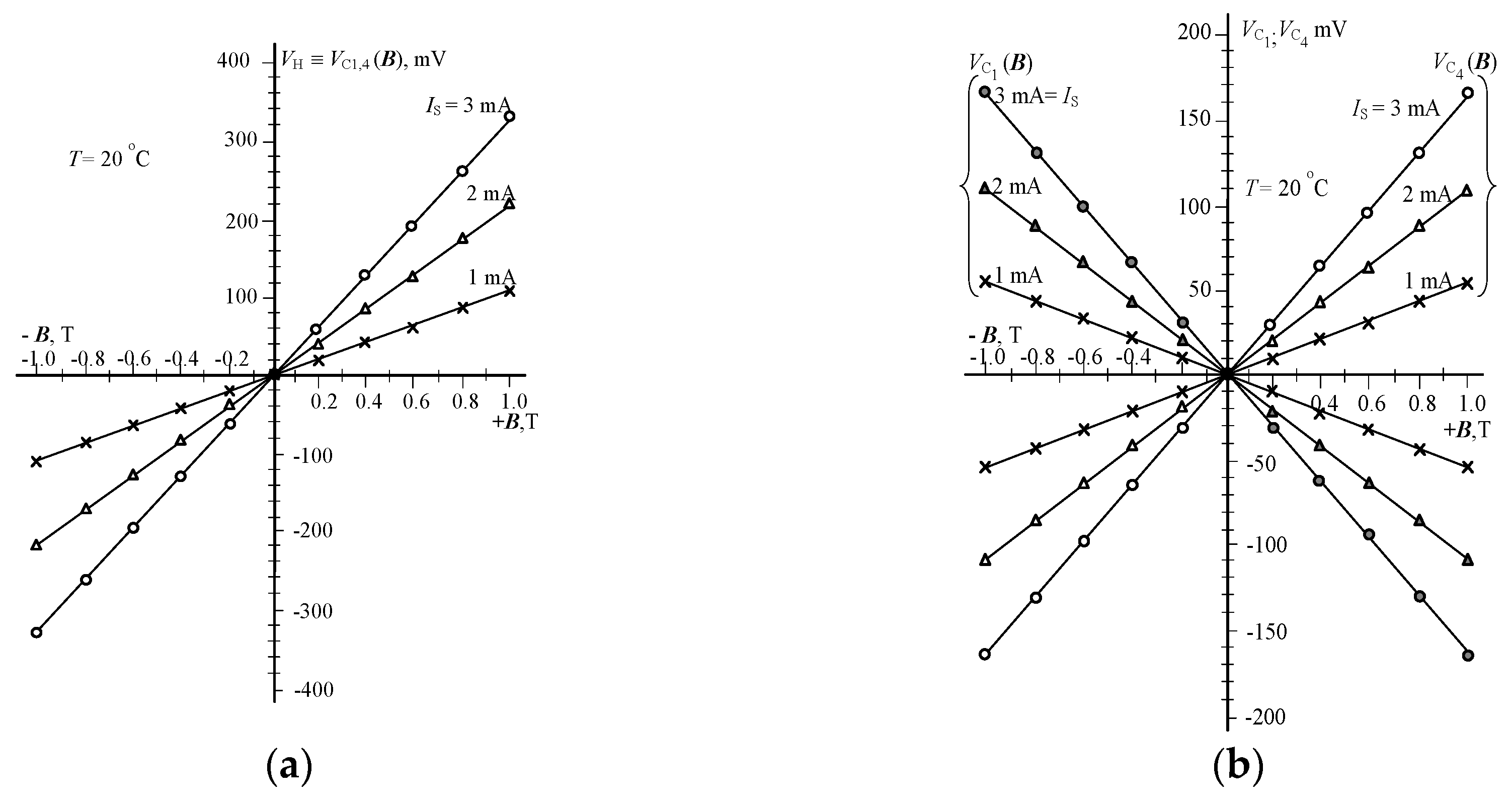
3. Results
4. Conclusions
Acknowledgments
References
- Roumenin, C.S. Hall Effect Sensor, Bulg. Patent No. 41974/06.05.1986, 1986. [Google Scholar]
- Roumenin, C.S. Parallel-field Hall microsensor. Compt. Rendus ABS 1987, 40, 59–62. [Google Scholar]
- Falk, U. A symmetrical vertical Hall-effect device. Sens. Actuators A 1990, 21–23, 751–753. [Google Scholar] [CrossRef]
- Roumenin, C. Solid State Magnetic Sensors, Elsevier, 1994; Microsensors for magnetic field. In MEMS—A Practical Guide to Design, Analysis and Application; Korvink, J.G., Paul, O., Eds.; William Andrew Publisher: Norwich, NY, USA, 2006; pp. 453–521. [Google Scholar]
- Kaufmann, T. On the Offset and Sensitivity of CMOS-Based Five-Contact Vertical Hall Devices; Der Andere Verlag: Tonning, Germany, 2013; Volume 21, p. 147. [Google Scholar]
- Lozanova, S.V.; Roumenin, C.S. Parallel-field silicon Hall effect microsensors with minimal design complexity. IEEE Sens. J. 2009, 9, 761–766. [Google Scholar] [CrossRef]
- Schurig, E.; Schott, C.; Besse, P.-A.; Popovic, R.S. CMOS integrated vertical Hall sensor with low offset. In Proceedings of the XVI European Conference on Solid-State Transducers, Prague, Czech Republic, 15–18 September 2002; pp. 868–871. [Google Scholar]
- Schurig, E.; Schott, C.; Besse, P.-A.; Demierre, M.; Popovic, R.S. 0.2 mT residual offset of CMOS integrated vertical Hall sensors. Sens. Actuators A 2004, 110, 98–104. [Google Scholar] [CrossRef]
- Schott, C.; Popovic, R. Integrated 3-D Hall magnetic field sensor. In Proceedings of the Transducers ’99, Sendai, Japan, 7–10 June 1999; Volume 1, pp. 168–171. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lozanova, S.; Kolev, I.; Ivanov, A.; Roumenin, C. In-Plane Sensitive Magnetoresistors as a Hall Device. Proceedings 2018, 2, 710. https://doi.org/10.3390/proceedings2130710
Lozanova S, Kolev I, Ivanov A, Roumenin C. In-Plane Sensitive Magnetoresistors as a Hall Device. Proceedings. 2018; 2(13):710. https://doi.org/10.3390/proceedings2130710
Chicago/Turabian StyleLozanova, Siya, Ivan Kolev, Avgust Ivanov, and Chavdar Roumenin. 2018. "In-Plane Sensitive Magnetoresistors as a Hall Device" Proceedings 2, no. 13: 710. https://doi.org/10.3390/proceedings2130710
APA StyleLozanova, S., Kolev, I., Ivanov, A., & Roumenin, C. (2018). In-Plane Sensitive Magnetoresistors as a Hall Device. Proceedings, 2(13), 710. https://doi.org/10.3390/proceedings2130710