Nonlinear Analytical Model of Two Weakly Coupled MEMS Cantilevers for Mass Sensing Using Electrostatic Actuation †



Abstract
:1. Introduction
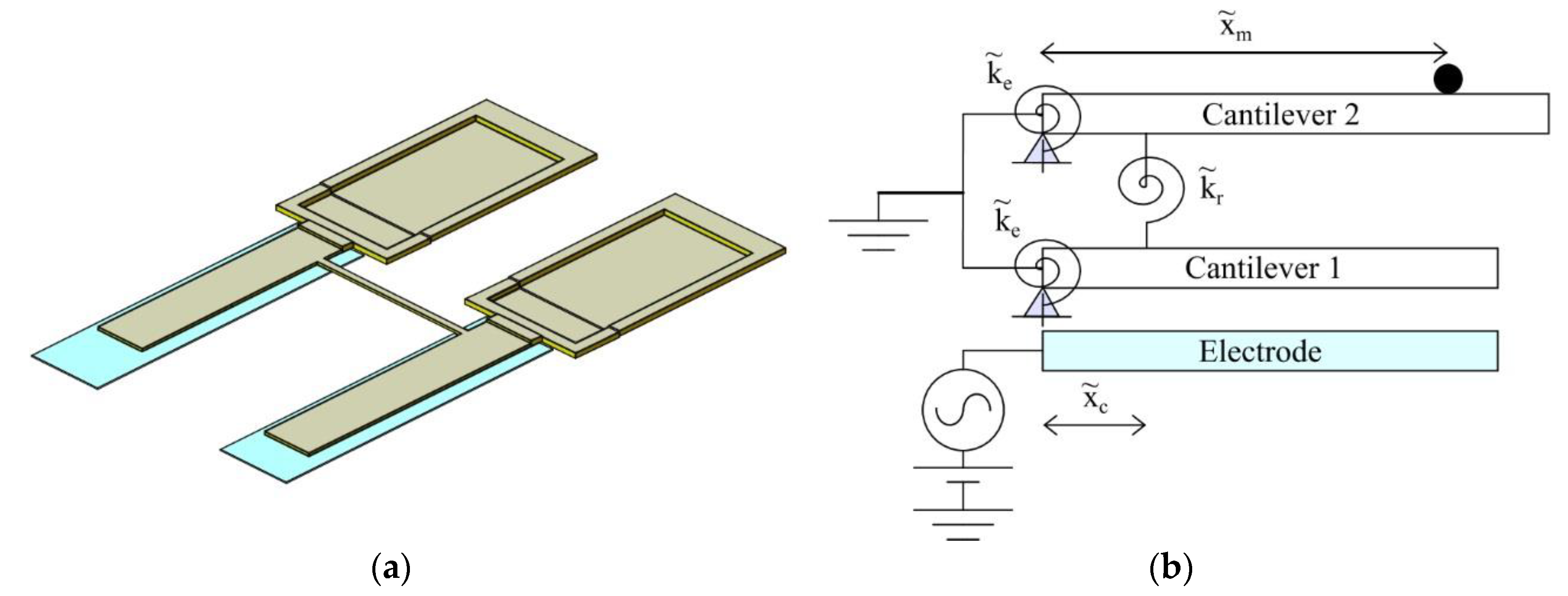
2. Presentation of the Device and the Model
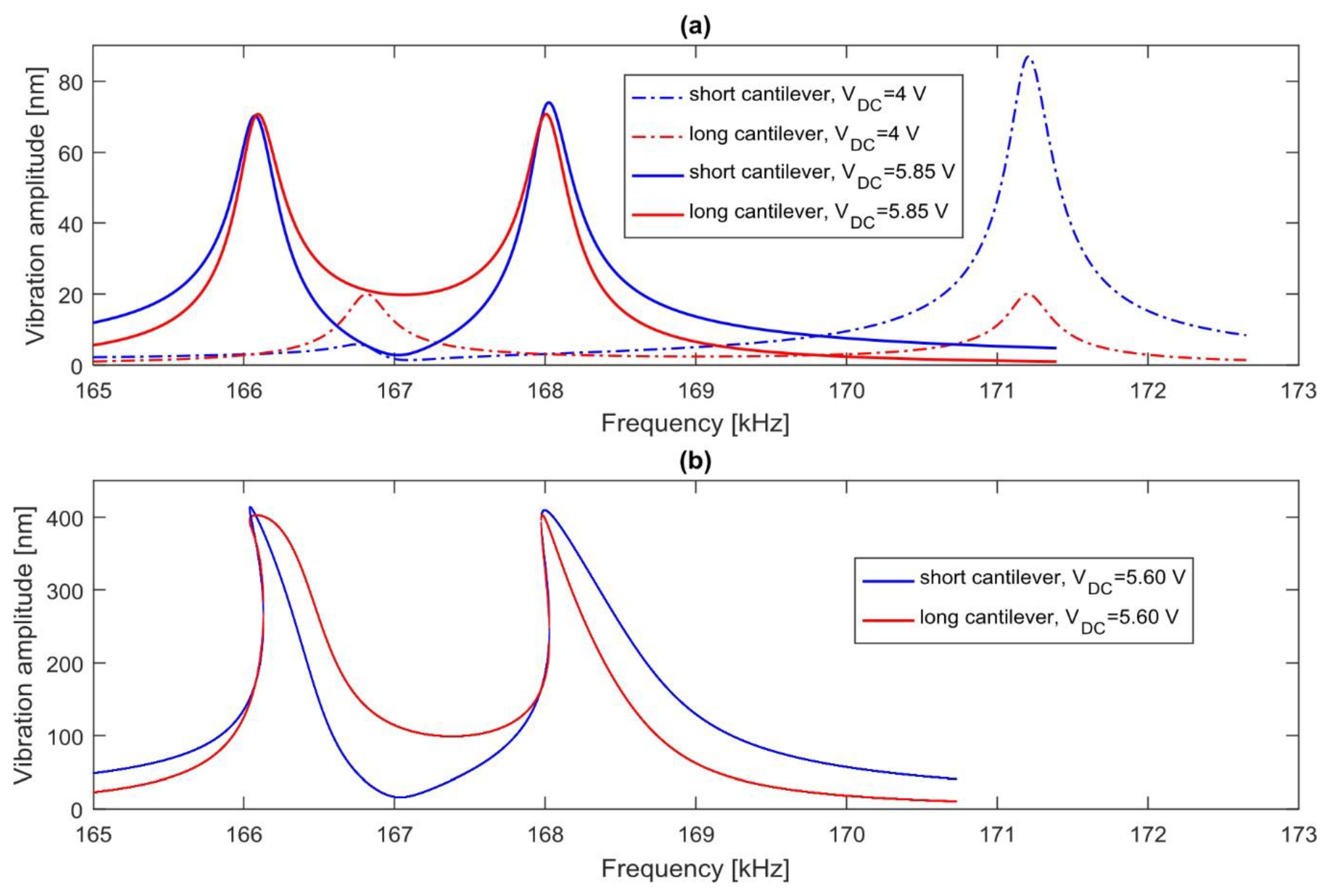
3. Use of an Electrostatic Force to Equilibrate the System
4. Effect of the Coupling ratio in Mass Sensing
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Zhao, C.; Montaseri, M.H.; Wood, G.S.; Pu, S.H.; Seshia, A.A.; Kraft, M. A review on coupled MEMS resonators for sensing applications utilizing mode localization. Sens. Actuators A Phys. 2016, 249, 93–111. [Google Scholar] [CrossRef]
- Spletzer, M.; Raman, A.; Wu, A.Q.; Xu, X.; Reifenberger, R. Ultrasensitive mass sensing using mode localization in coupled microcantilevers. Appl. Phys. Lett. 2006, 88, 254102. [Google Scholar] [CrossRef]
- Timoshenko, S. Strength of Materials. Part 1: Elementary Theory and Problems, 2nd ed.; D. Van Nostrand Co.: Toronto, ON, Canada, 1951. [Google Scholar]
- Nishiyama, H.; Nakamura, M. Form and capacitance of parallel-plate capacitors. IEEE Trans. Compon. Packag. Manuf. Technol. Part A 1994, 17, 477–484. [Google Scholar] [CrossRef]
- Bouchaala, A.; Nayfeh, A.H.; Younis, M.I. Frequency shifts of micro and nano cantilever beam resonators due to added masses. J. Dyn. Syst. Meas. Control 2016, 138, 091002. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Mook, D.T. Nonlinear Oscillations; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Walter, V.; Bourbon, G.; le Moal, P.; Kacem, N.; Lardiès, J. Electrostatic actuation to counterbalance the manufacturing defects in a MEMS mass detection sensor using mode localization. Procedia Eng. 2016, 168, 1488–1491. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Coupling Beam Position [μm] | W2/W1, In-Phase Mode | W1/W2, Out-Of-Phase Mode |
|---|---|---|
| 5 | 1.26 | 1.72 |
| 10 | 1.19 | 1.23 |
| 15 | 1.12 | 1.14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rabenimanana, T.; Walter, V.; Kacem, N.; Moal, P.L.; Lardiès, J. Nonlinear Analytical Model of Two Weakly Coupled MEMS Cantilevers for Mass Sensing Using Electrostatic Actuation. Proceedings 2018, 2, 1084. https://doi.org/10.3390/proceedings2131084
Rabenimanana T, Walter V, Kacem N, Moal PL, Lardiès J. Nonlinear Analytical Model of Two Weakly Coupled MEMS Cantilevers for Mass Sensing Using Electrostatic Actuation. Proceedings. 2018; 2(13):1084. https://doi.org/10.3390/proceedings2131084
Chicago/Turabian StyleRabenimanana, Toky, Vincent Walter, Najib Kacem, Patrice Le Moal, and Joseph Lardiès. 2018. "Nonlinear Analytical Model of Two Weakly Coupled MEMS Cantilevers for Mass Sensing Using Electrostatic Actuation" Proceedings 2, no. 13: 1084. https://doi.org/10.3390/proceedings2131084
APA StyleRabenimanana, T., Walter, V., Kacem, N., Moal, P. L., & Lardiès, J. (2018). Nonlinear Analytical Model of Two Weakly Coupled MEMS Cantilevers for Mass Sensing Using Electrostatic Actuation. Proceedings, 2(13), 1084. https://doi.org/10.3390/proceedings2131084