1. Introduction
The research on human body motion tracking techniques is topical nowadays [
1]. These technologies are heavily used in many and different fields, such as medicine, automation, sport or military. Body motion tracking devices are used to implement ergonomic and easy to use human-machine interfaces or to evaluate and supervise sensitive operations performed manually (e.g. Computer Aided Surgery, or implantology) [
2]. The research is always active to try to propose more and more accurate devices able to detect movements with greater precision and less latency [
3]. For the hand motion tracking, existing devices can be categorized in two different types, depending on the capturing principle: optical-based and data gloves-based. The first type permits to obtain the position of the tracked object by analyzing successive images. This method allows free movements without the constraint of a physical device, but the accuracy can be limited by external factors, such as luminosity or the line of sight interruption. The second type is represented by the data gloves, i.e., systems usually composed by fabric gloves in which sensors are embedded. They are slightly more invasive but produce more reliable data [
4]. This work describes a preliminary study performed on sensors applied to a system based on the data glove principle, but with the intent of being less invasive. The system is composed by a wearable module equipped with a stretch sensor and an Inertial Motion Unit (IMU), which transmit real-time motion data to a readout unit wirelessly.
2. Stretch Sensor and Bent Sensor Behavior Analysis
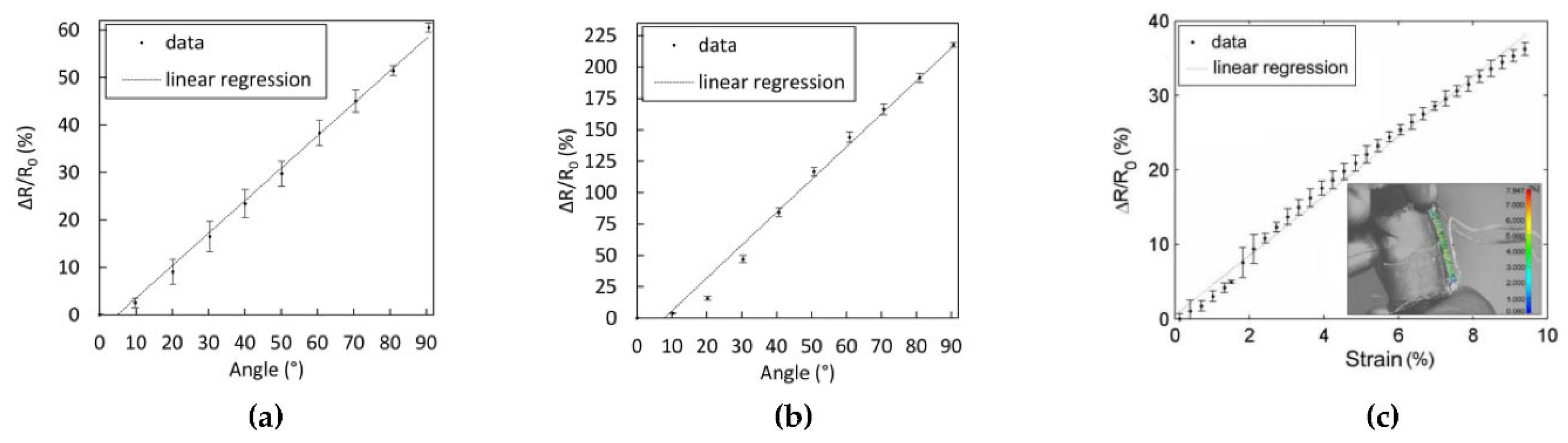
A preliminary study was conducted to determine which transducer was the most appropriate for evaluating second phalanx flexion. In the study, three different transducers were considered. Two of them are bend sensors, respectively a standard 4-inch polyester bend sensor from Flexpoint, and a 4.5-inch 7920 bend sensor from Spectra Symbol. The third one is a stretch sensor produced by Images SI. This is composed by an elastic conductive rubber that modifies its resistance when a stretched. The bend sensors were tested by imposing a known angle (from 0° to 90°) and evaluating their resistance. For the stretch sensor, a progressive strain was applied and analyzed using ARAMIS Adjustable optical system (GOM) and its resistance value was measured. As it is possible to observe in
Figure 1, the stretch sensor presents a more linear behavior in the range of interest. In fact, in 0–10% strain interval, its resistance changes linearly with the strain and the calculated gauge factor is 4,73. Moreover, the application of bend sensors is more difficult because it is necessary to allow one of the ends to slide freely, since the substrate on which the sensitive element is deposited is not elastic. The stretch sensor is therefore chosen to equip the first prototype of the wearable measuring device.
3. Description of the System
The system is composed by two distinct sections. The first one is the wearable device applied on the tracked finger (between the first and second phalanges) and it is called measuring unit, whereas the second one is a specific written computer program. The measuring unit detects finger orientation through an IMU coupled with the first phalanx. The relative movement between the first and the second phalanges is captured by a stretch sensor, since it presents only one degree of freedom. Data are then elaborated and prepared for transmission by a microcontroller unit and are sent to the readout unit through a Bluetooth Low Power (BLE) connection.
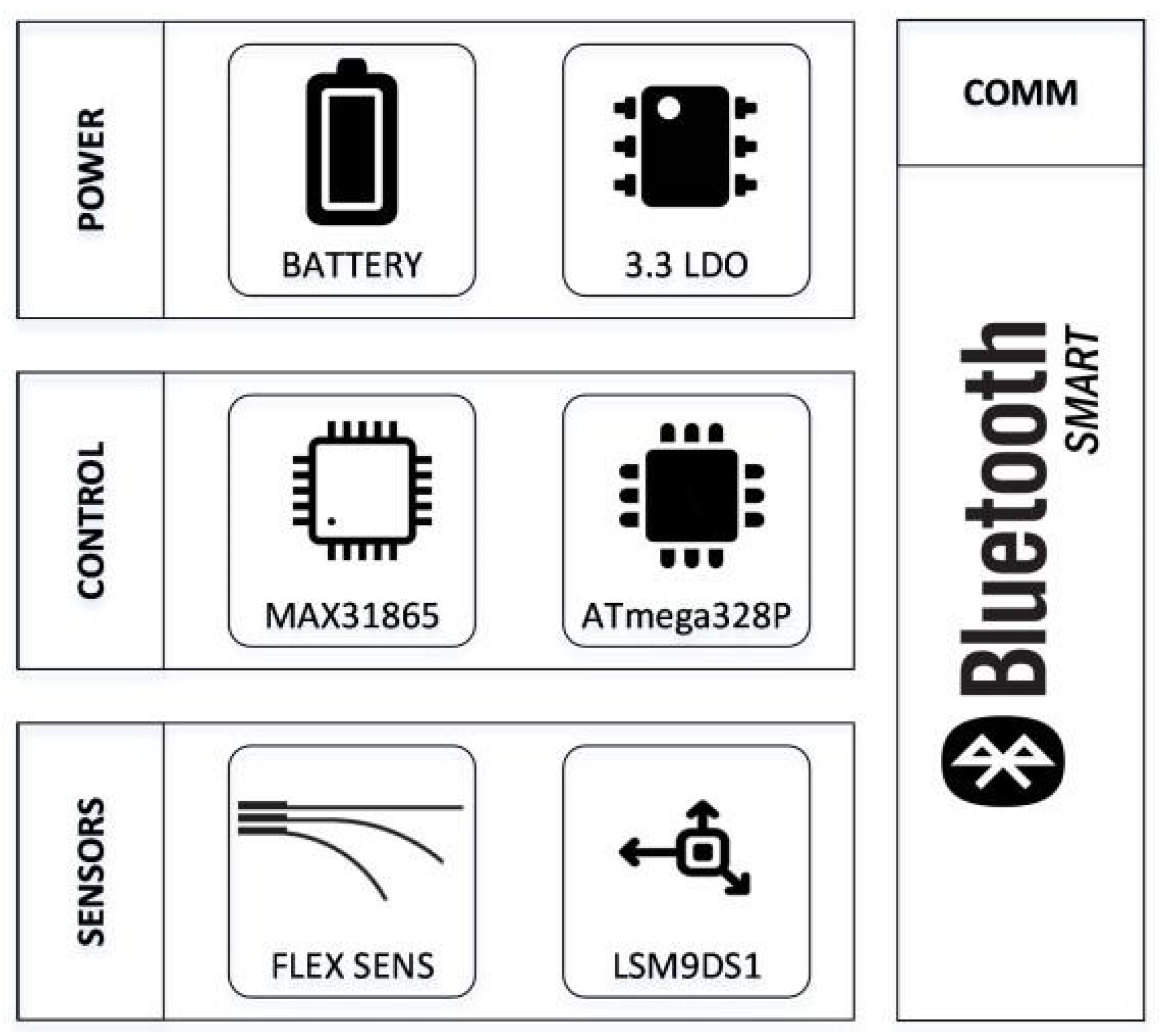
The measuring unit (
Figure 2) is composed by numerous parts. A microcontroller unit, an ATmega328P, supervises all the peripherals connected, it reads sensors outputs and transmits the data. The orientation of the first phalanx, and consequently of the entire finger, is retrieved by the LMS9DS1 IMU, from STMicroelectronics. The device includes in a single chip an accelerometer, a gyroscope and a magnetometer. A stretch sensor, from Images SI, is used to calculate the flexion angle between the first and the second phalanx. In order to adapt to the length of the different fingers, a specific sensor is built for each one. Starting from the row filament (which has a resistivity of about 395 Ω/cm), a chunk of proper length is cut and assembled with a pair of crimped conductive clasps at its edges. A two-ring support made of velcro is developed to firmly secure the stretch sensor between the two phalanges. One side is bounded to the first phalanx and the other one to the second one. The evaluation of stretch sensor resistance is assigned to an integrated circuit specifically developed to perform resistance measurements (MAX 31865, Maxim Integrated). Through its SPI interface, a new measure can be requested and, after the conversion is done, the corresponding digital value is accessible. Finally, the system is equipped with a BLE module (RN4871, Microchip Technology), to achieve wireless and low-power data transmission.
4. Experimental Study
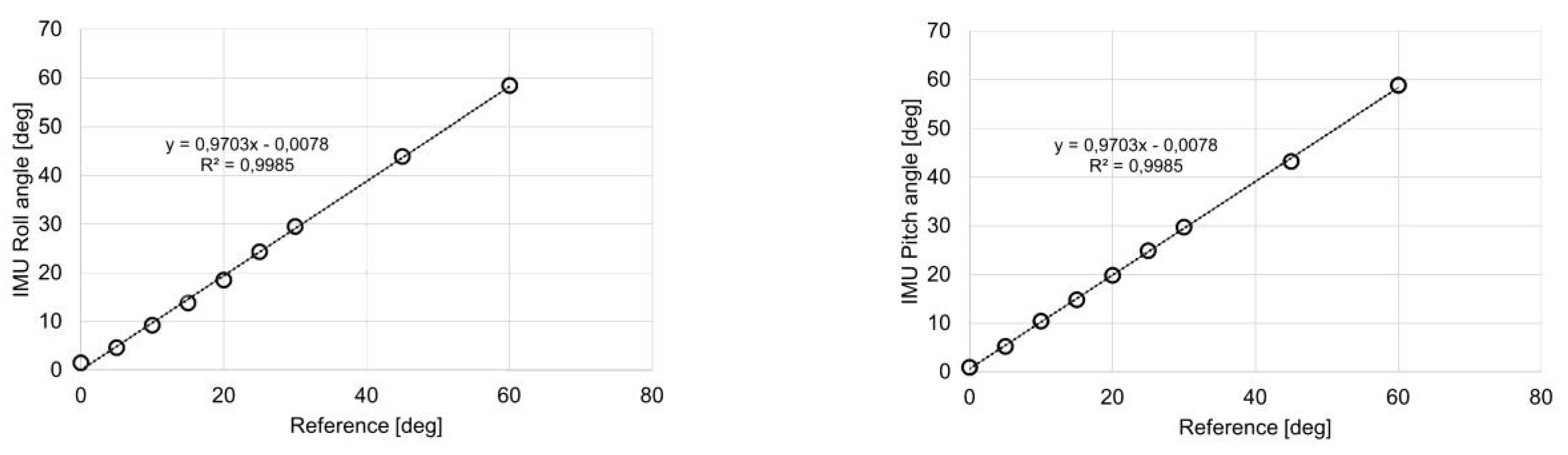
Performed laboratory tests are divided in two main sections. In the first one, we tested the transducer with which the system is equipped, whereas, in the second part, we evaluated the overall functionalities. First, the accelerometer section of the IMU was tested. The sensor was used as an inclinometer to retrieve pitch and roll angles starting from the acceleration measured on the three axes. Values of the angles were obtained through Formulas (1): (a) pitch angle, (b) roll angle.
The device was bounded to a mechanical structure by which it was possible to impose a known angle. The results of the retrieved data from the IMU were compared with the imposed known angle (
Figure 3). The R
2 values are respectively 0.9985 and 0.9996 for the roll and pitch angles showing a good correspondence between the angles imposed and measured.
To test the overall system, the measurement module was worn by all hand fingers in turn and we evaluated stretch sensor response during finger flexion/extension movement. As highlighted in
Table 1, a significant difference in the obtained resistance values allow discriminating between flexed and extended positions.
Finally, either index or middle fingers wore a measurement module each. This test aims to evaluate the possibility of discriminating between two objects when they are grasped. In fact, since the two objects have different shapes and sizes, this will produce different flexions of the fingers. After a first learning phase, the system was able to recognize which object was gripped. As reported in
Table 2, if a single finger is considered, there are overlapping values that cannot allow object recognition, but, crossing the two-finger data, it is possible to complete the recognition.
5. Conclusions
In the present work, a prototype version of a modular device able to track the finger movements has been proposed. The project development started with the characterization of the transducers and then the verification of their adequacy. The preliminary results open the possibility of a future development focused on a modular device composed by five elements, one for each hand finger and able to detect complex gesture such as pinch, spread or tap and to recognize different predefined objects.
This work was supported by the Italian Ministry of Instruction, University and Research, under Grant PRIN 2015C37B25.





{kind=link}
{kind=link}
{kind=link}