Automatic Wireless Monitoring System for Real-Time Rock Fall Events †

 ,
,  ,
,  , ,
, ,  ,
,  and
and 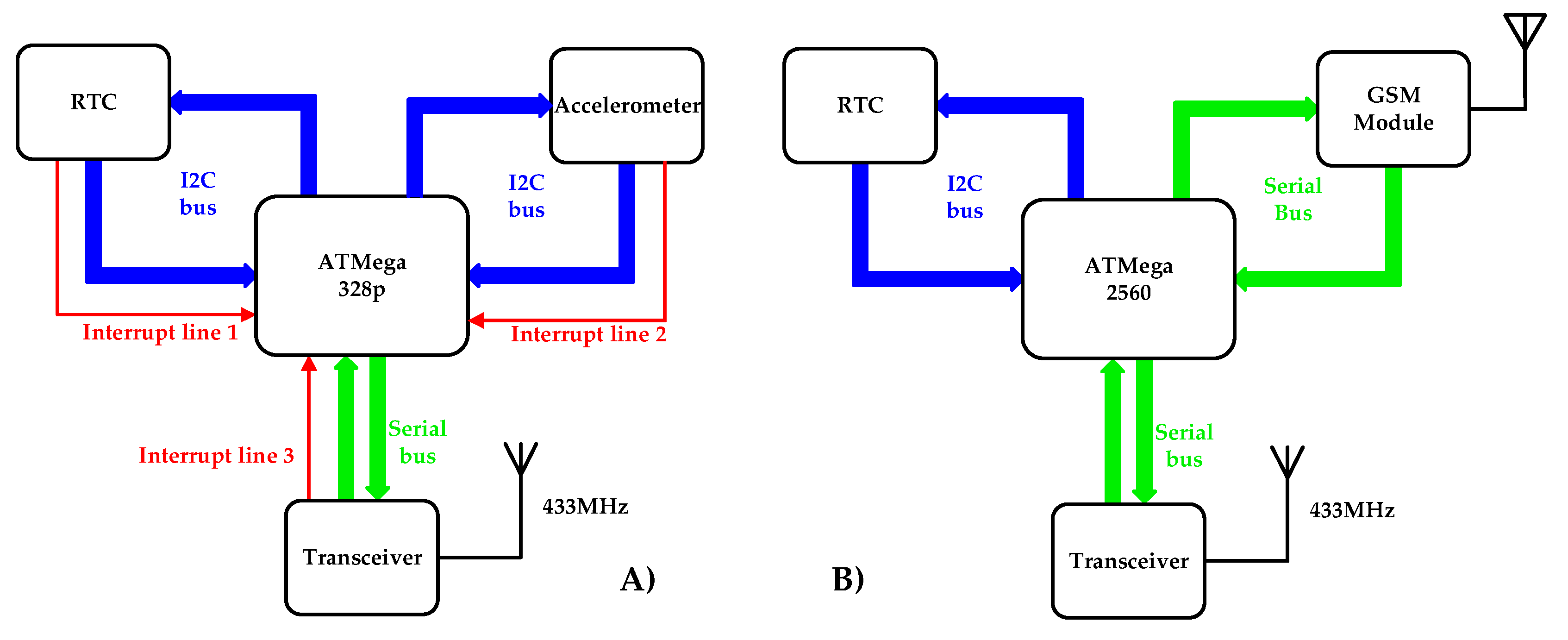{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
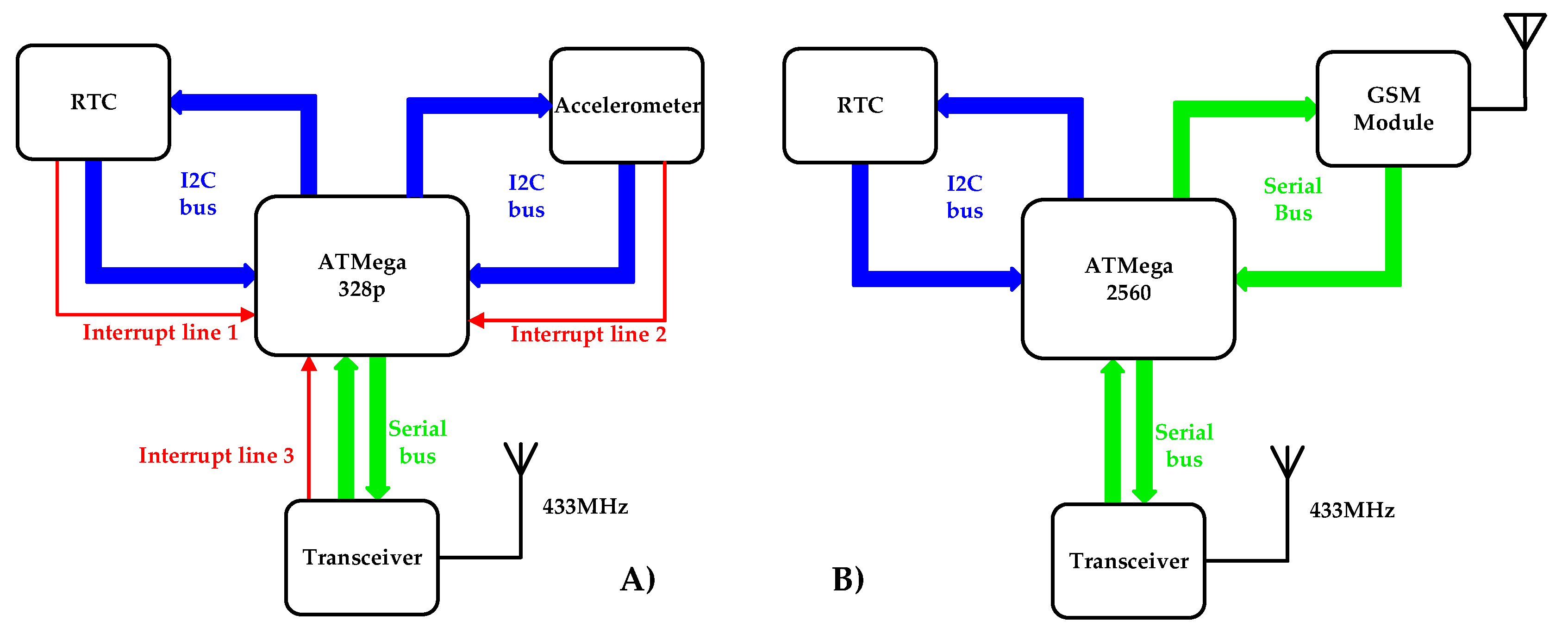
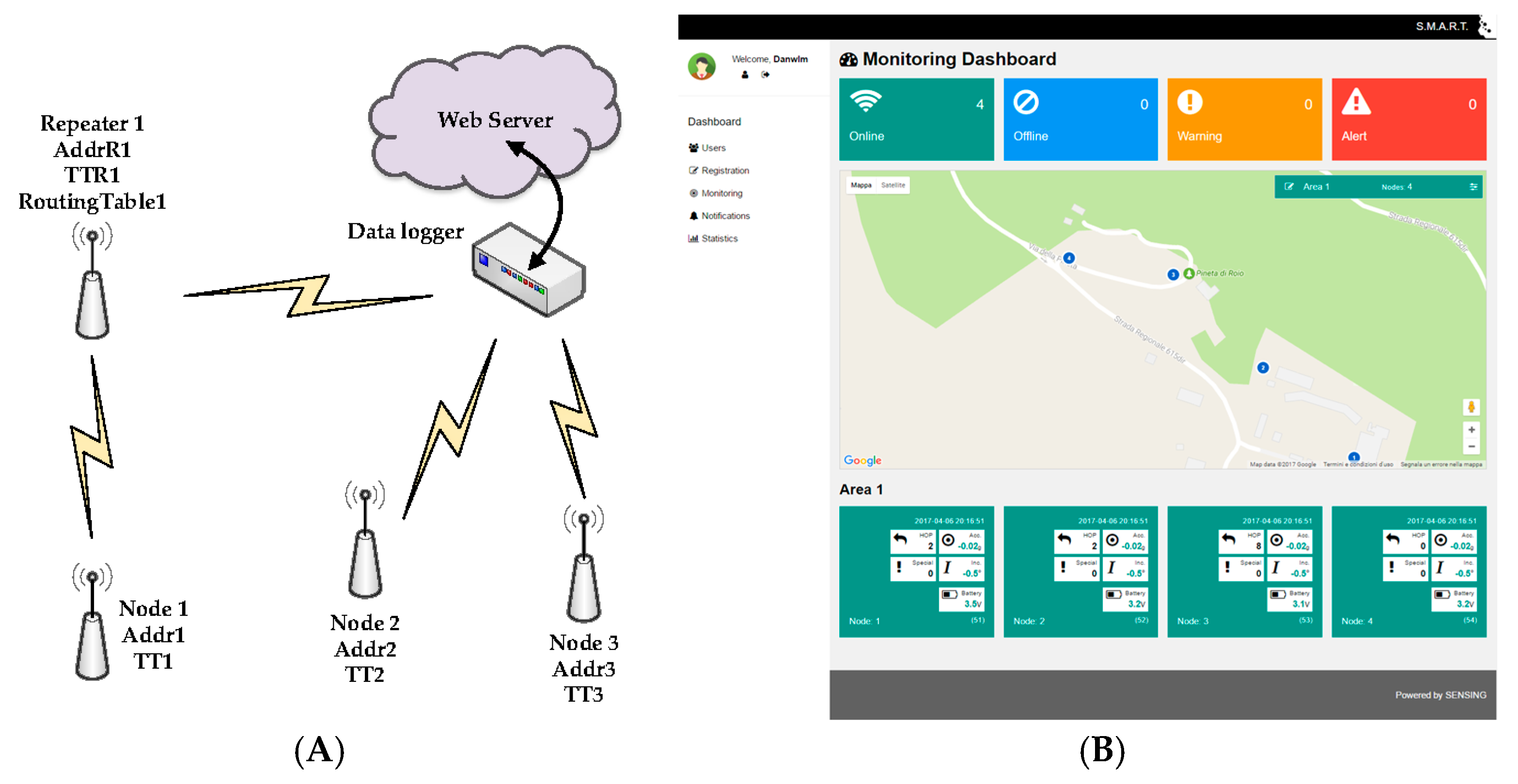
2. Proposed Network: Hardware
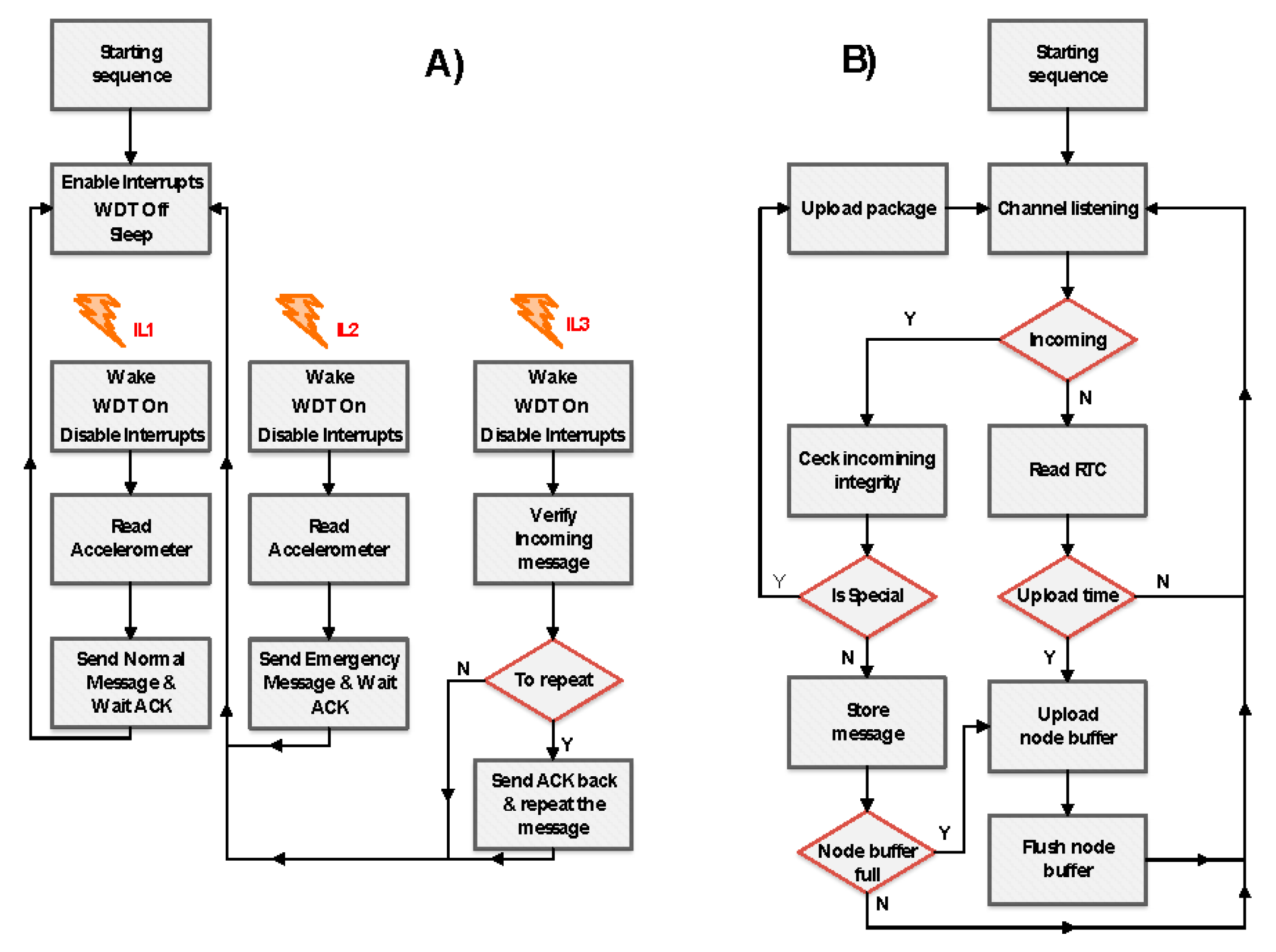
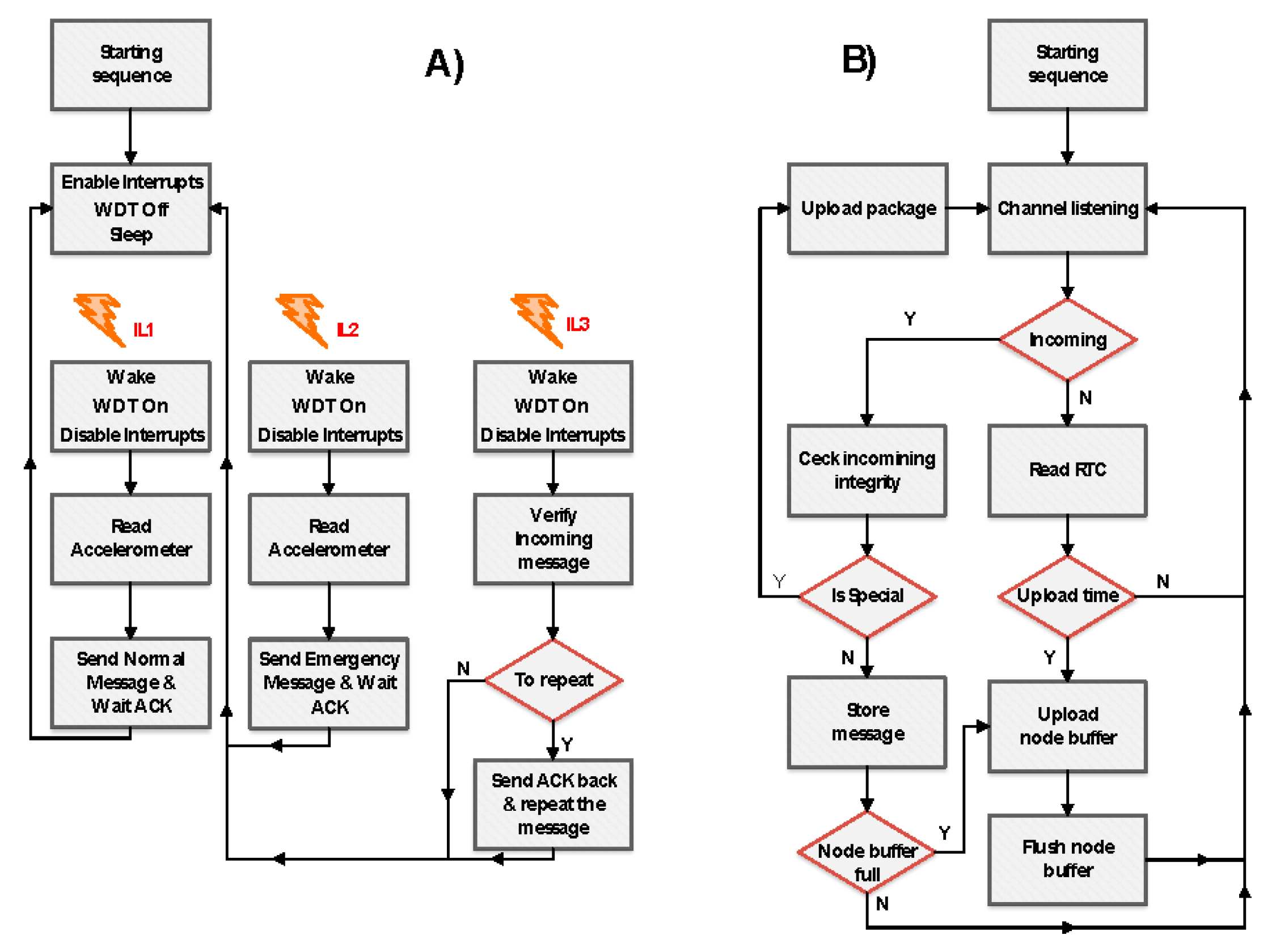
3. Proposed Network: Firmware and Protocol
4. Conclusions
Conflicts of Interest
References
- Chehri, A.; Fortier, P.P.; Tardif, M. Security monitoring using wireless sensor networks. In Proceedings of the 5th Annual Conference on Communication Networks and Services Research (CNSR 2007), Fredericton, NB, Canada; 2007; pp. 13–17. [Google Scholar]
- Alippi, C.; Camplani, R.; Galperti, C.; Marullo, A.; Roveri, M. An hybrid wireless-wired monitoring system for real-time rock collapse forecasting. In Proceedings of the 7th International Conference on Mobile Ad Hoc and Sensor System (MASS), San Francisco, CA, USA, 8–12 November 2010; pp. 224–231. [Google Scholar]
- Ferri, G.; Parente, F.R.; Stornelli, V.; Barile, G.; Pantoli, L. Automatic bridge-based interface for differential capacitive full sensing. Procedia Eng. 2016, 168, 1585–1588. [Google Scholar] [CrossRef]
- Ferri, G.; Parente, F.R.; Stornelli, V.; Barile, G. Full range analog Wheatstone bridge-based automatic circuit for differential capacitance sensor evaluation. Int. J. Circuit Theory Appl. 2016. [Google Scholar] [CrossRef]
- Barile, G.; Ferri, G.; Parente, F.R.; Stornelli, V.; Depari, A.; Flammini, A.; Sisinni, E. A standard CMOS bridge based analog interface for differential capacitive sensors. In Proceedings of the IEEE 13th Prime Conference, Taormina, Italy, 12–15 June 2017; pp. 281–284. [Google Scholar]
- Pantoli, L.; Leoni, A.; Stornelli, V.; Ferri, G. An IC architecture for RF Energy Harvesting systems. J. Commun. Softw. Syst. 2017, 13, 96–100. [Google Scholar] [CrossRef]
- Di Marco, P.; Stornelli, V.; Ferri, G.; Pantoli, L.; Leoni, A. Dual band harvester architecture for autonomous remote sensors. Sens. Actuators A Phys. 2016, 247, 598–603. [Google Scholar] [CrossRef]
- Pantoli, L.; Leoni, A.; Stornelli, V.; Ferri, G. Energy Harvester for Remote Sensors Systems. In Proceedings of the IEEE International Multidisciplinary Conference on Computer and Energy Science (SpliTech), Split, Croatia, 13–15 July 2016; Volume 1. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barile, G.; Ferri, G.; Leoni, A.; Muttillo, M.; Pantoli, L.; Stornelli, V.; Vettori, D. Automatic Wireless Monitoring System for Real-Time Rock Fall Events. Proceedings 2017, 1, 569. https://doi.org/10.3390/proceedings1040569
Barile G, Ferri G, Leoni A, Muttillo M, Pantoli L, Stornelli V, Vettori D. Automatic Wireless Monitoring System for Real-Time Rock Fall Events. Proceedings. 2017; 1(4):569. https://doi.org/10.3390/proceedings1040569
Chicago/Turabian StyleBarile, Gianluca, Giuseppe Ferri, Alfiero Leoni, Mirco Muttillo, Leonardo Pantoli, Vincenzo Stornelli, and Daniele Vettori. 2017. "Automatic Wireless Monitoring System for Real-Time Rock Fall Events" Proceedings 1, no. 4: 569. https://doi.org/10.3390/proceedings1040569
APA StyleBarile, G., Ferri, G., Leoni, A., Muttillo, M., Pantoli, L., Stornelli, V., & Vettori, D. (2017). Automatic Wireless Monitoring System for Real-Time Rock Fall Events. Proceedings, 1(4), 569. https://doi.org/10.3390/proceedings1040569