Linear Position Sensing through Conductive Wall without Permanent Magnet †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
3. Results
- The simplest approach is to find the maximum value and provide the position of the respective sensor. The position error is half of the spacing of sensors, in our case ±15 mm.
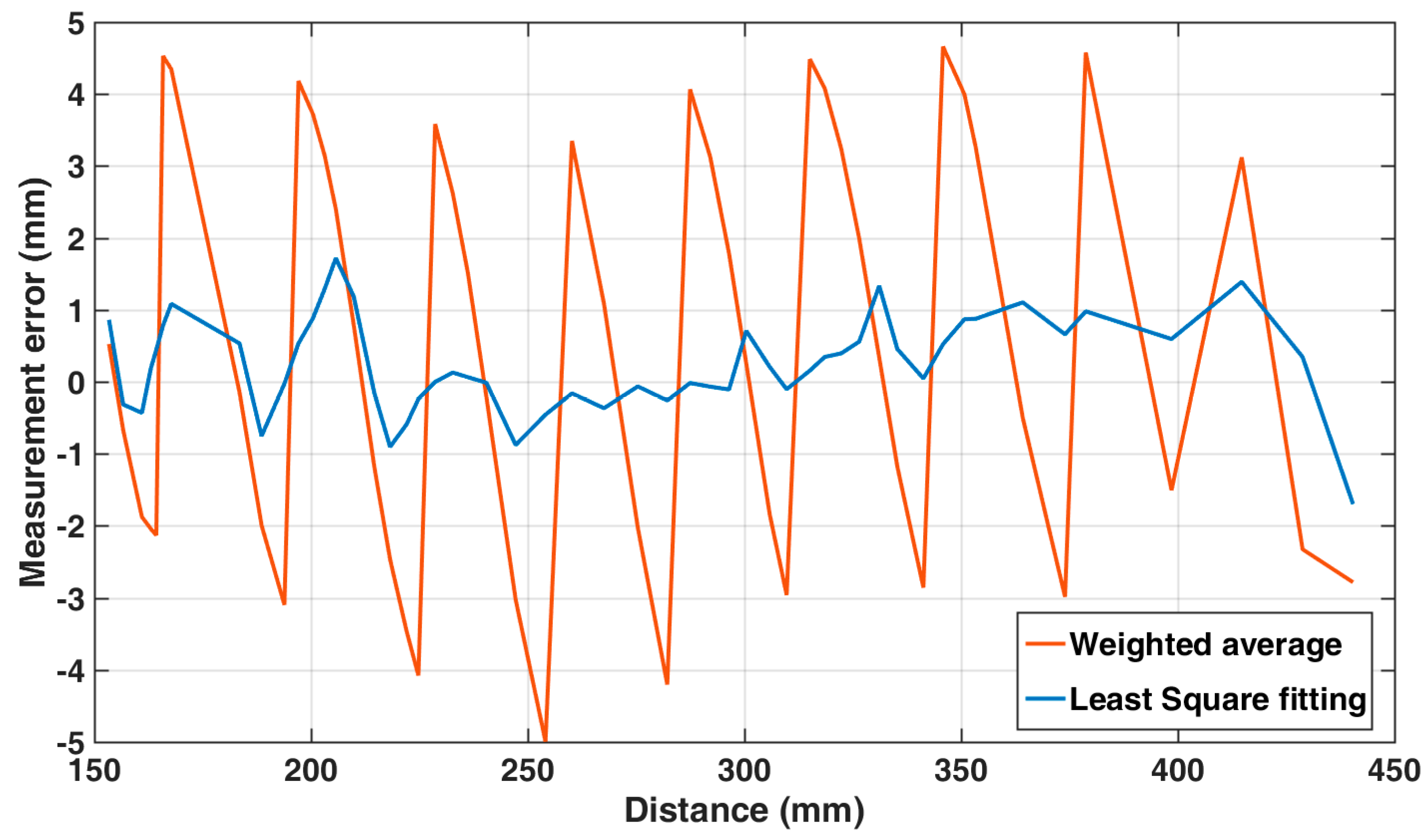
- Weighted average method ∑(outputi × distancei)/∑outputi reached an error of ±5 mm, see Figure 6. For noise reduction the weighted average is computed using only the three sensors with the maximum output. The error is three times better than the “maximum output” method with only moderate computing capacity requirements of a final microprocessor-based processing circuit.
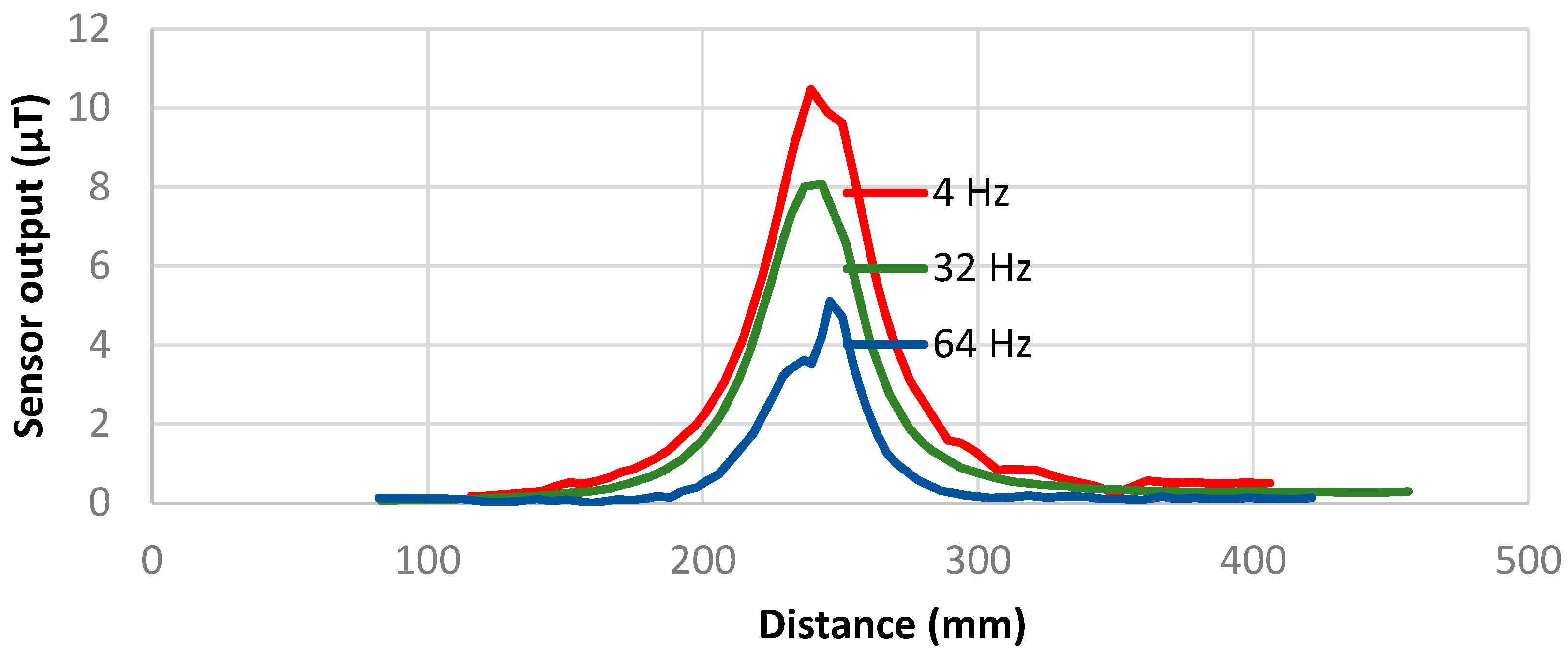
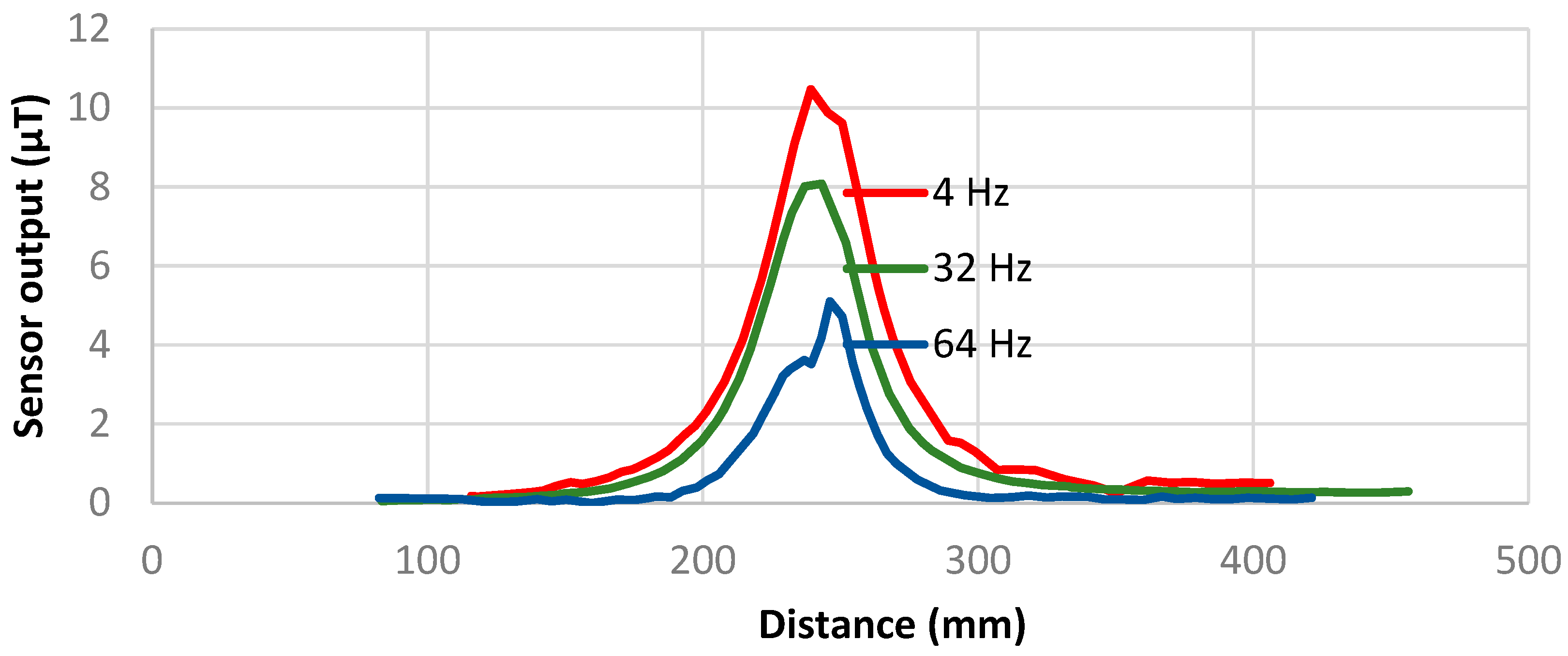
- Least squares fitting method minimized the formula ∑(outputi – estimated_outputi)2, where the estimated output function is known by the single-sensor measurement in Figure 4. This output function is supposed to be the same for all 16 sensors. The only unknown coefficient of the model is the distance shift, so the computation time is reasonable. This method reached the position error better than ±2 mm (Figure 6). Disadvantage of this method is that the output function is likely to be different between distinct cylinder types and needs to be measured. Further improvement of accuracy would provide a lookup table method with a laborious calibration throughout the full range with a fine step.
4. Discussion
Conflicts of Interest
References
- Ripka, P.; Vyhnanek, J.; Janosek, M.; Vcelak, J. AMR Proximity Sensor with Inherent Demodulation. IEEE Sens. J. 2014, 9, 3119–3123. [Google Scholar] [CrossRef]
- Reininger, T.; Welker, F.; Von Zeppelin, M. Sensors in position control applications for industrial automation. Sens. Actuators A Phys. 2006, 129, 270–274. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vyhnanek, J.; Ripka, P.; Chirtsov, A. Linear Position Sensing through Conductive Wall without Permanent Magnet. Proceedings 2017, 1, 390. https://doi.org/10.3390/proceedings1040390
Vyhnanek J, Ripka P, Chirtsov A. Linear Position Sensing through Conductive Wall without Permanent Magnet. Proceedings. 2017; 1(4):390. https://doi.org/10.3390/proceedings1040390
Chicago/Turabian StyleVyhnanek, Jan, Pavel Ripka, and Andrey Chirtsov. 2017. "Linear Position Sensing through Conductive Wall without Permanent Magnet" Proceedings 1, no. 4: 390. https://doi.org/10.3390/proceedings1040390
APA StyleVyhnanek, J., Ripka, P., & Chirtsov, A. (2017). Linear Position Sensing through Conductive Wall without Permanent Magnet. Proceedings, 1(4), 390. https://doi.org/10.3390/proceedings1040390