
Investigating Chaotic Techniques and Wave Profiles with Parametric Effects in a Fourth-Order Nonlinear Fractional Dynamical Equation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Fractional-Order Derivatives
Derivative
- .
- .
- .
- .
3. The Governing Equation
4. Extraction of Solutions
4.1. Generalized Projective Riccati Equation Method
- Family 1 WhenFor the soliton solution is identified by:
- Family 2 WhenFor the soliton solution is identified by:
- Family 3 WhenFor Hence, the periodic wave solution is written as:
- Family 4 WhenFor , we get
4.2. New Modified Generalized Exponential Rational Function Method
4.3. Modified F-Expansion Method
- For and we have Consequently, the dark soliton is identified by:
- For and we have As a result, the singular soliton can be determined by:
- For and we have along with Hence, the combo soliton solutions are written as:
- and give along with and Thus, the soliton solutions are expressed as
- For and we have along with Therefore, we get
- For and we have and Thus, we obtain
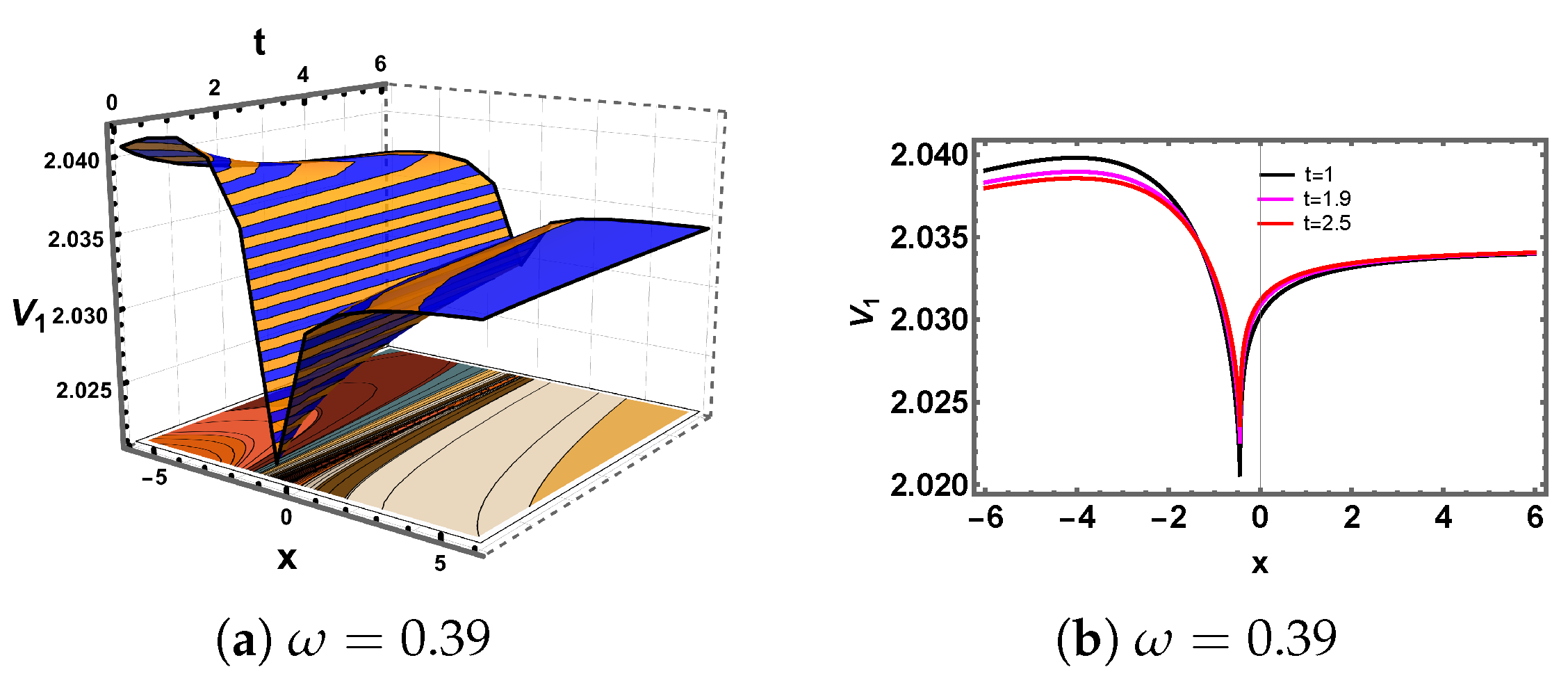
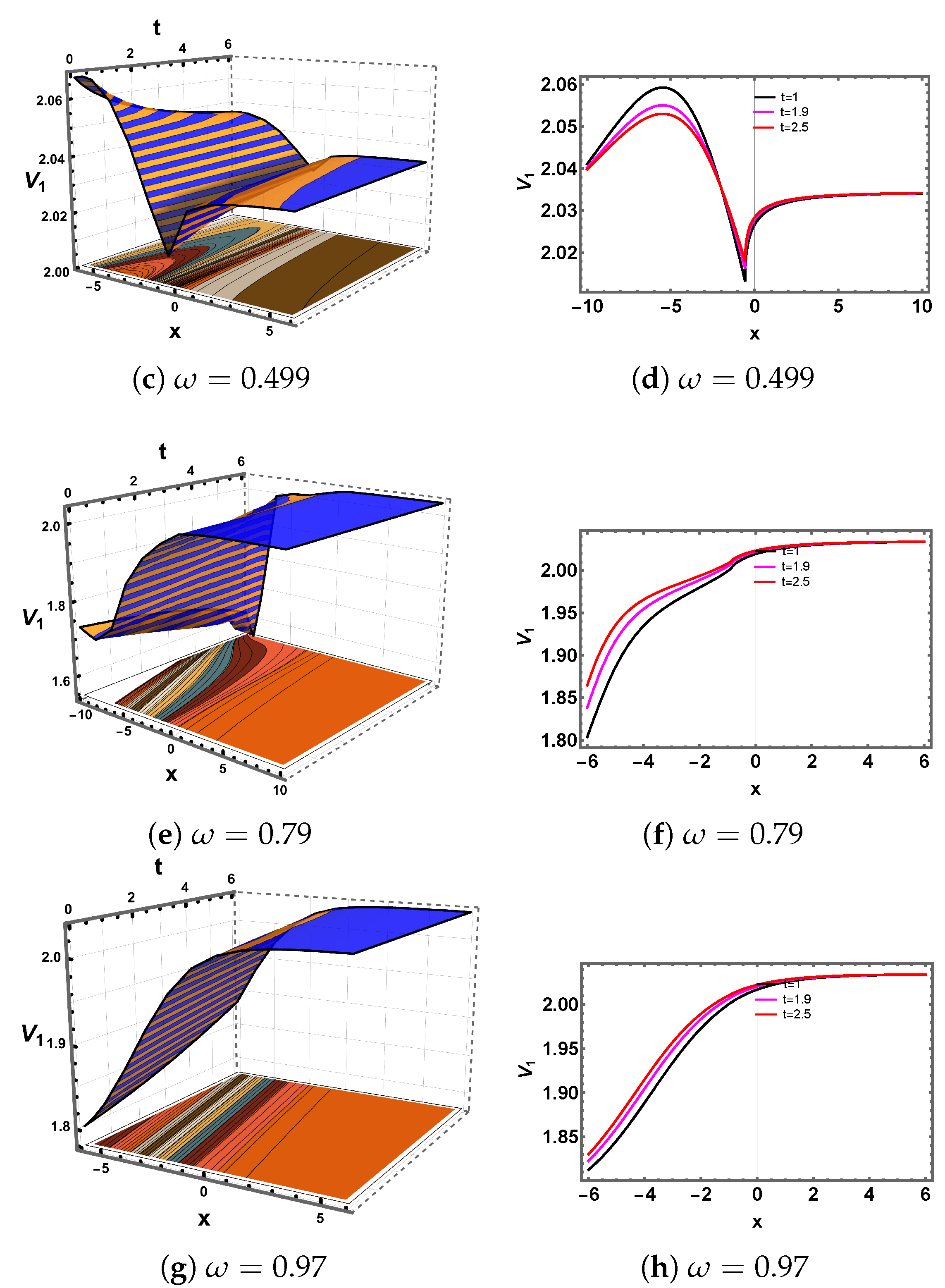
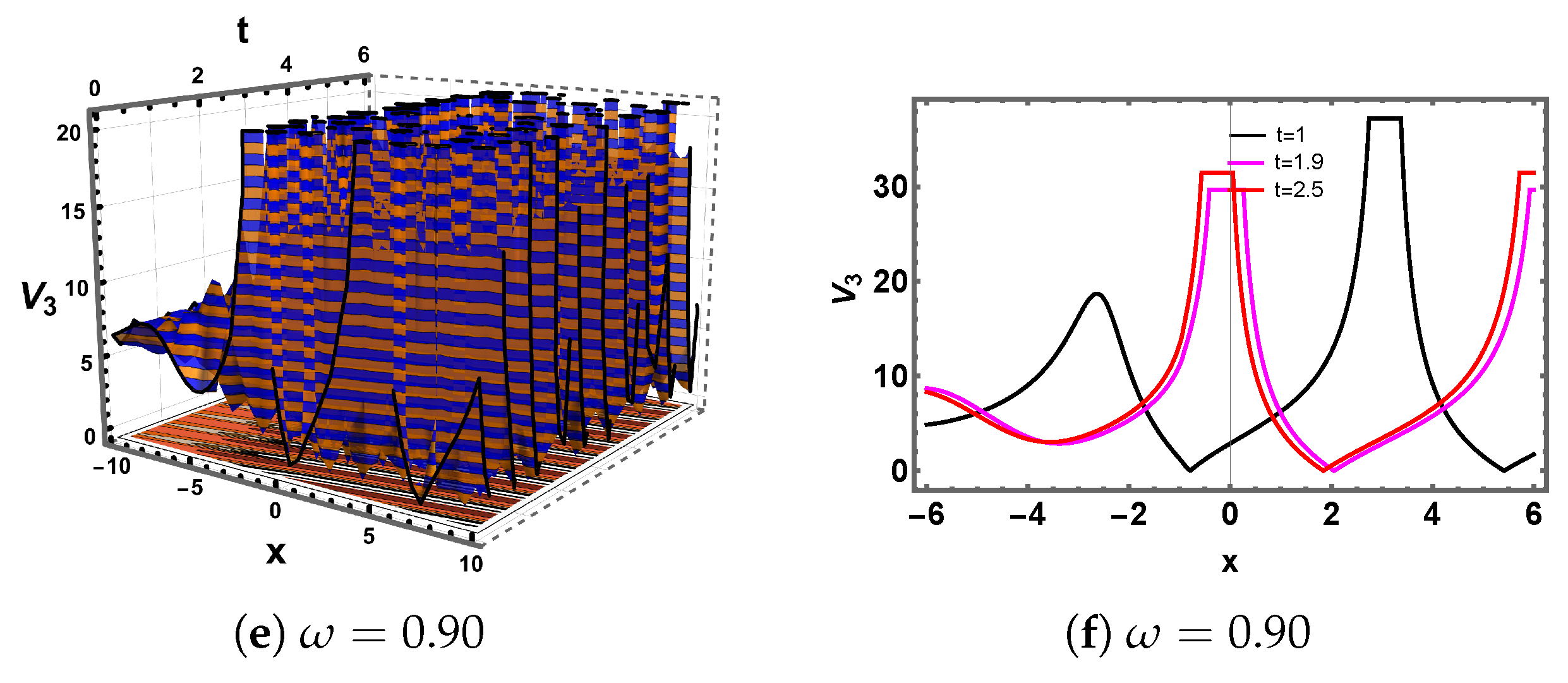
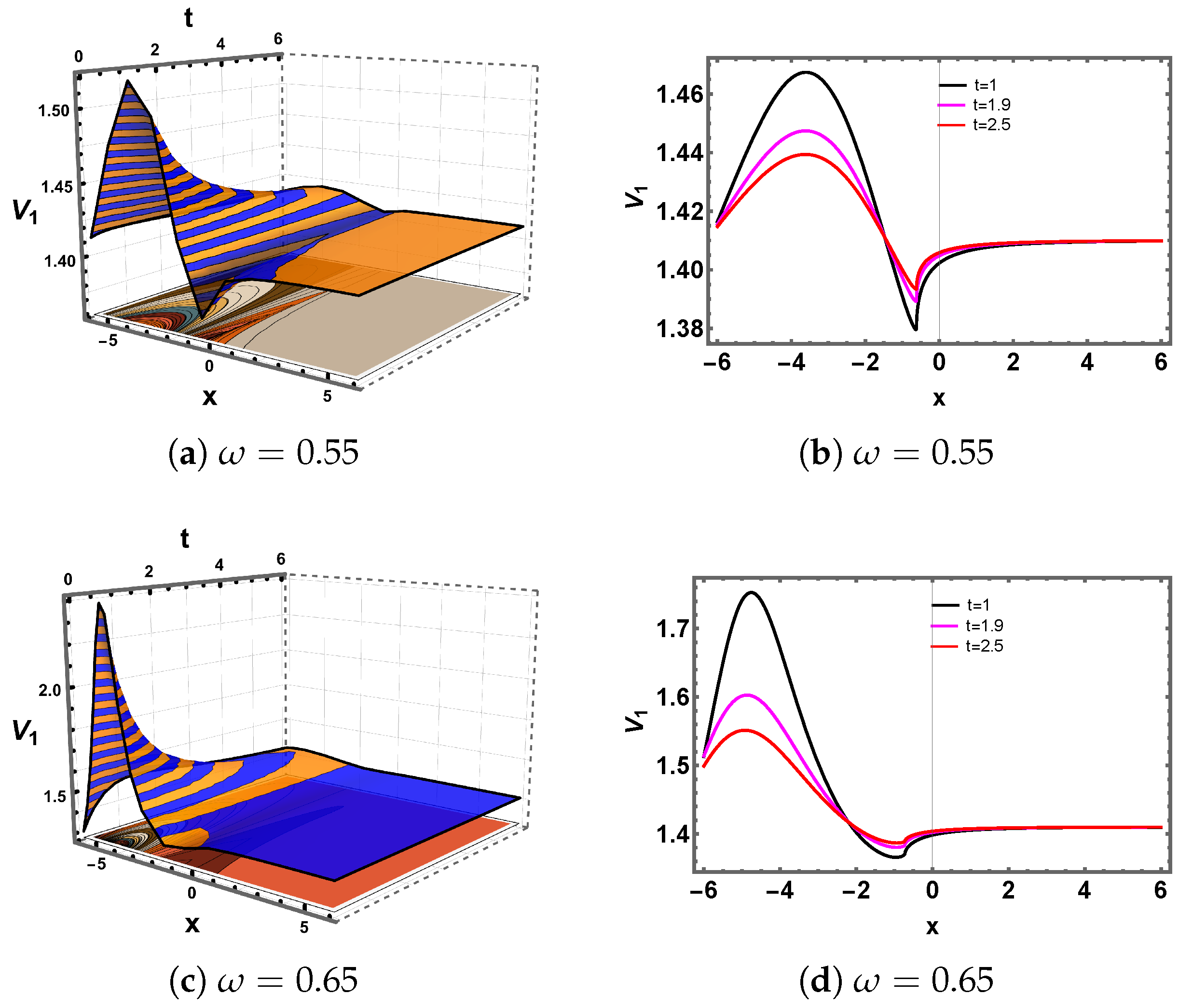
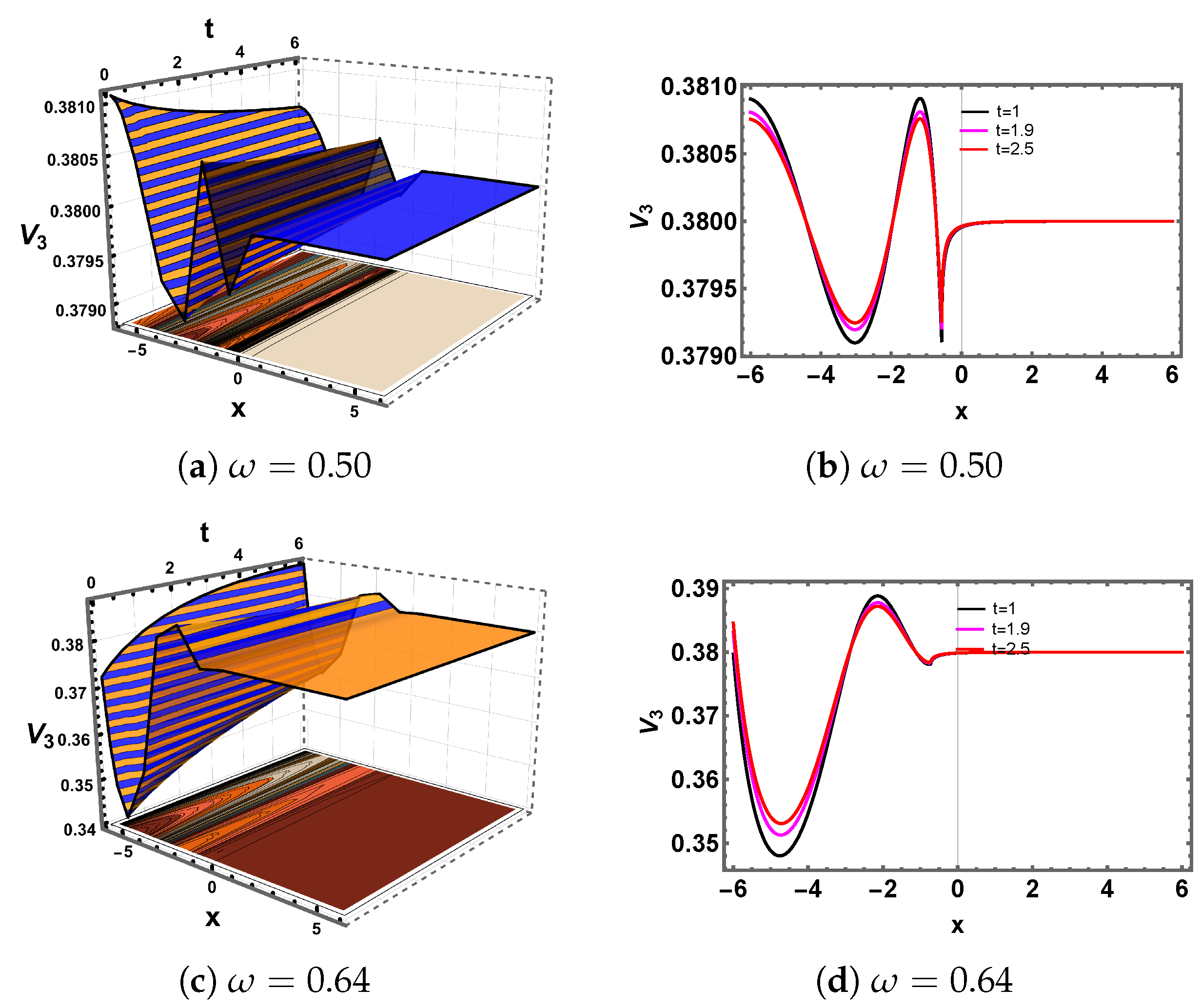
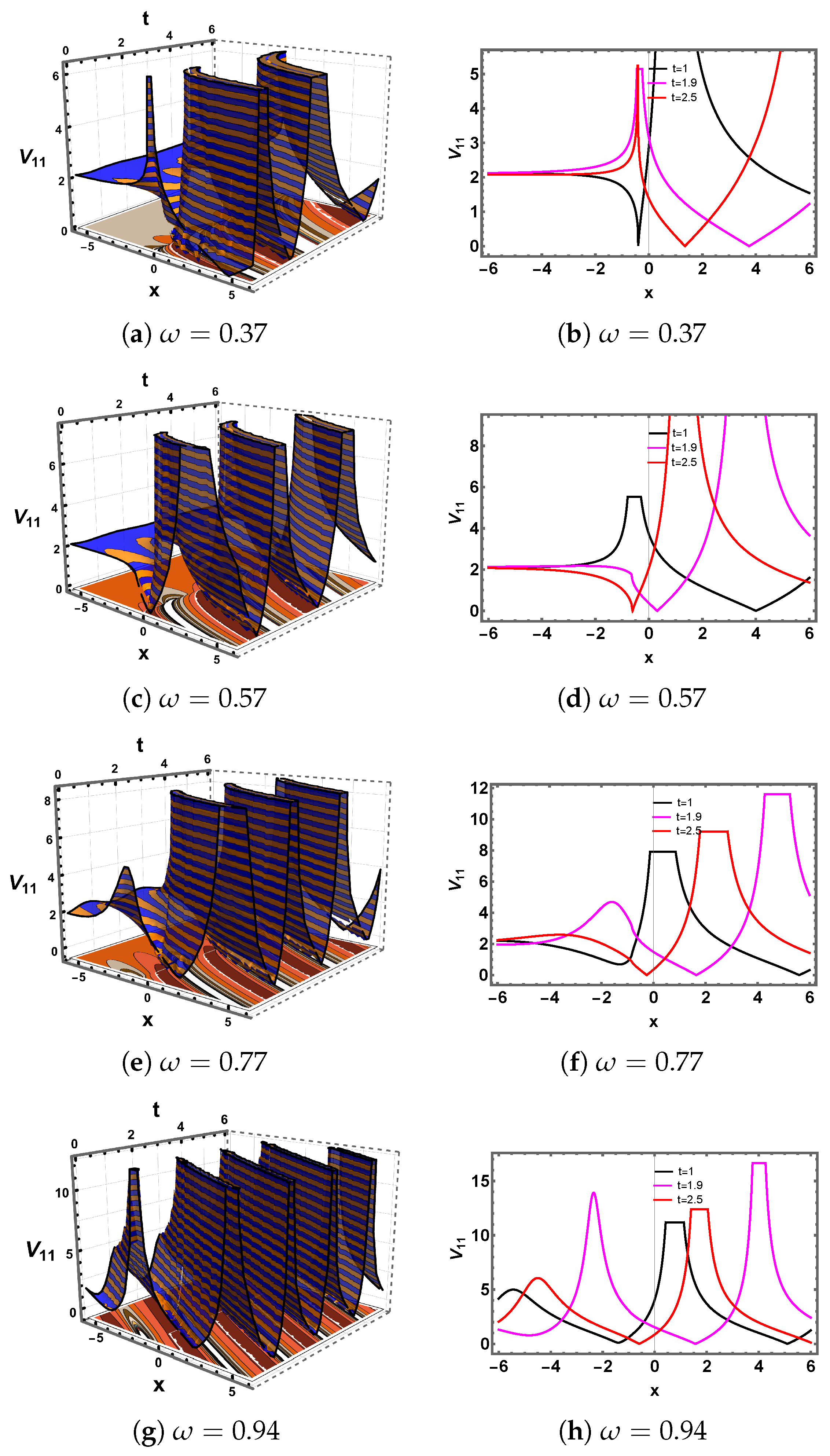
5. Discussion and Graphs
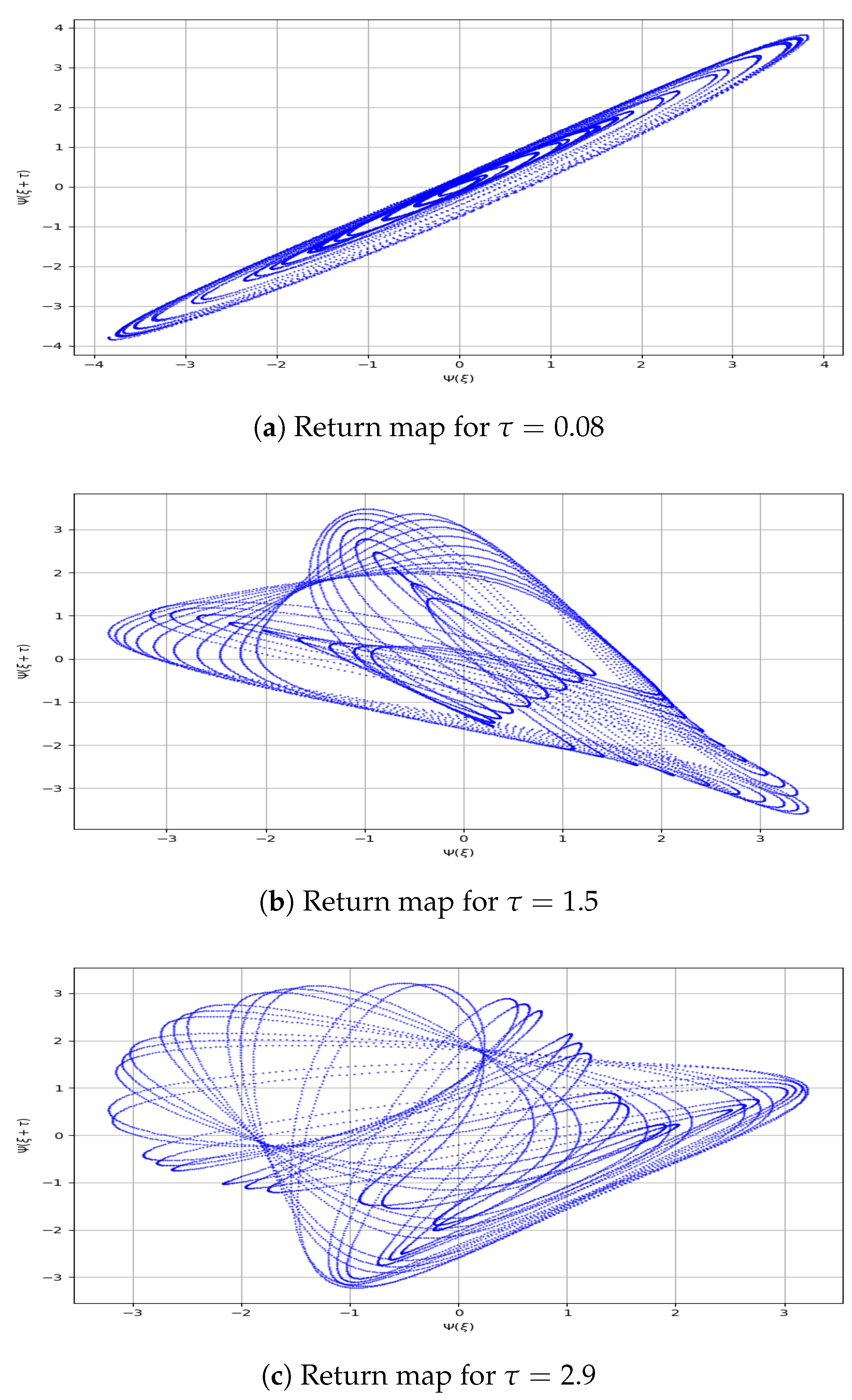
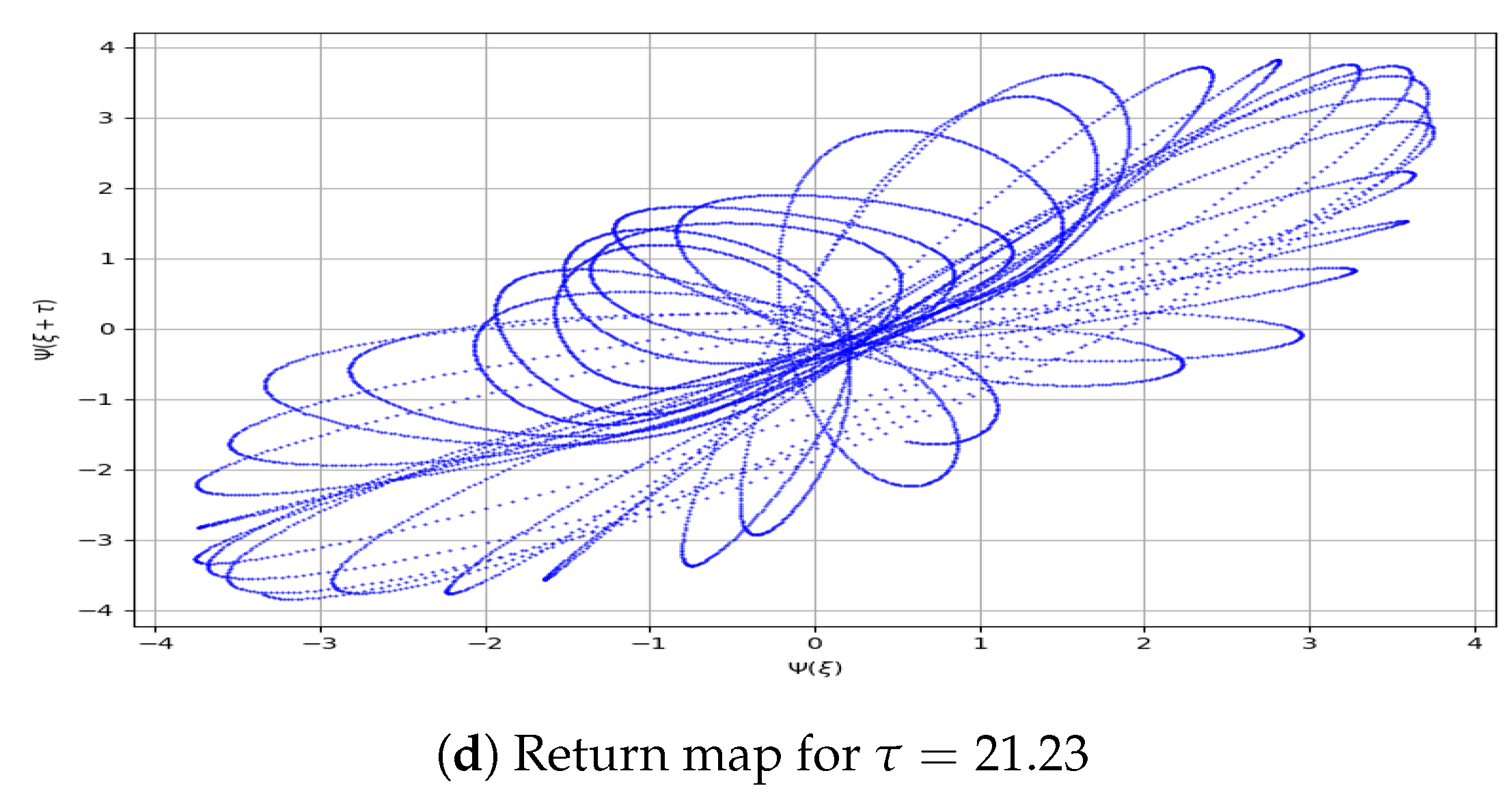
6. Exploring the AKNS Model by Applying a Dynamical System Approach
6.1. Return Map
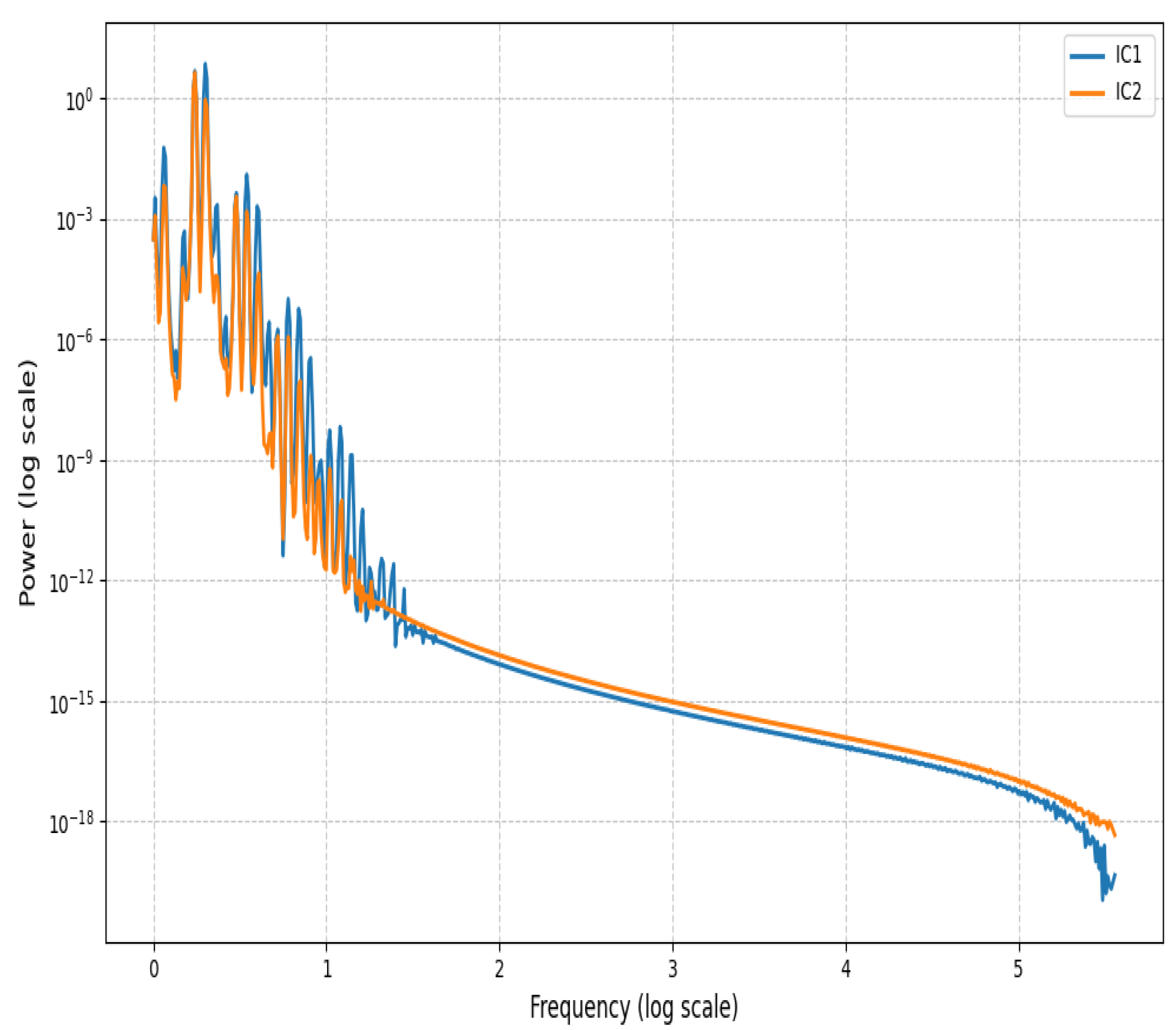
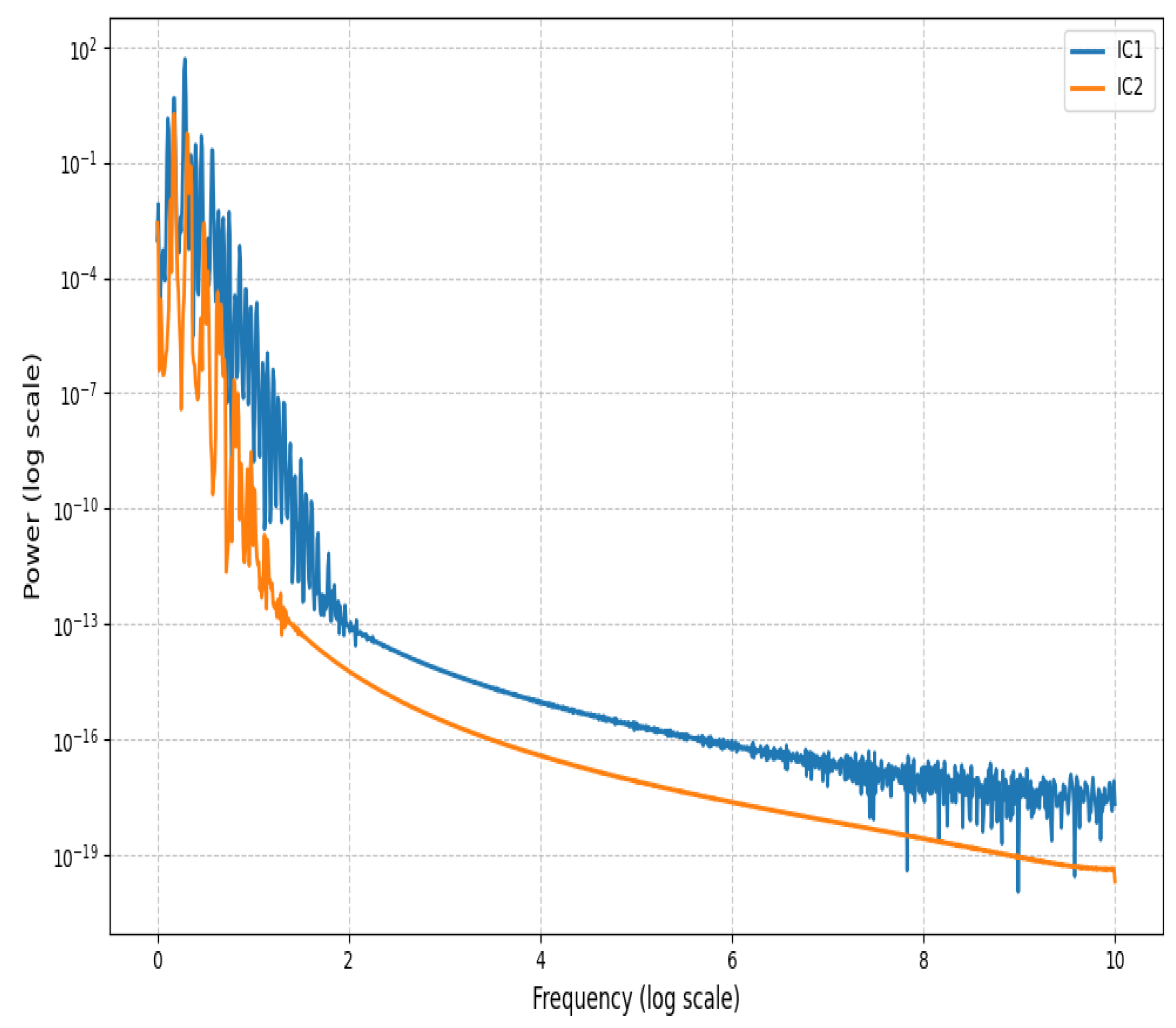
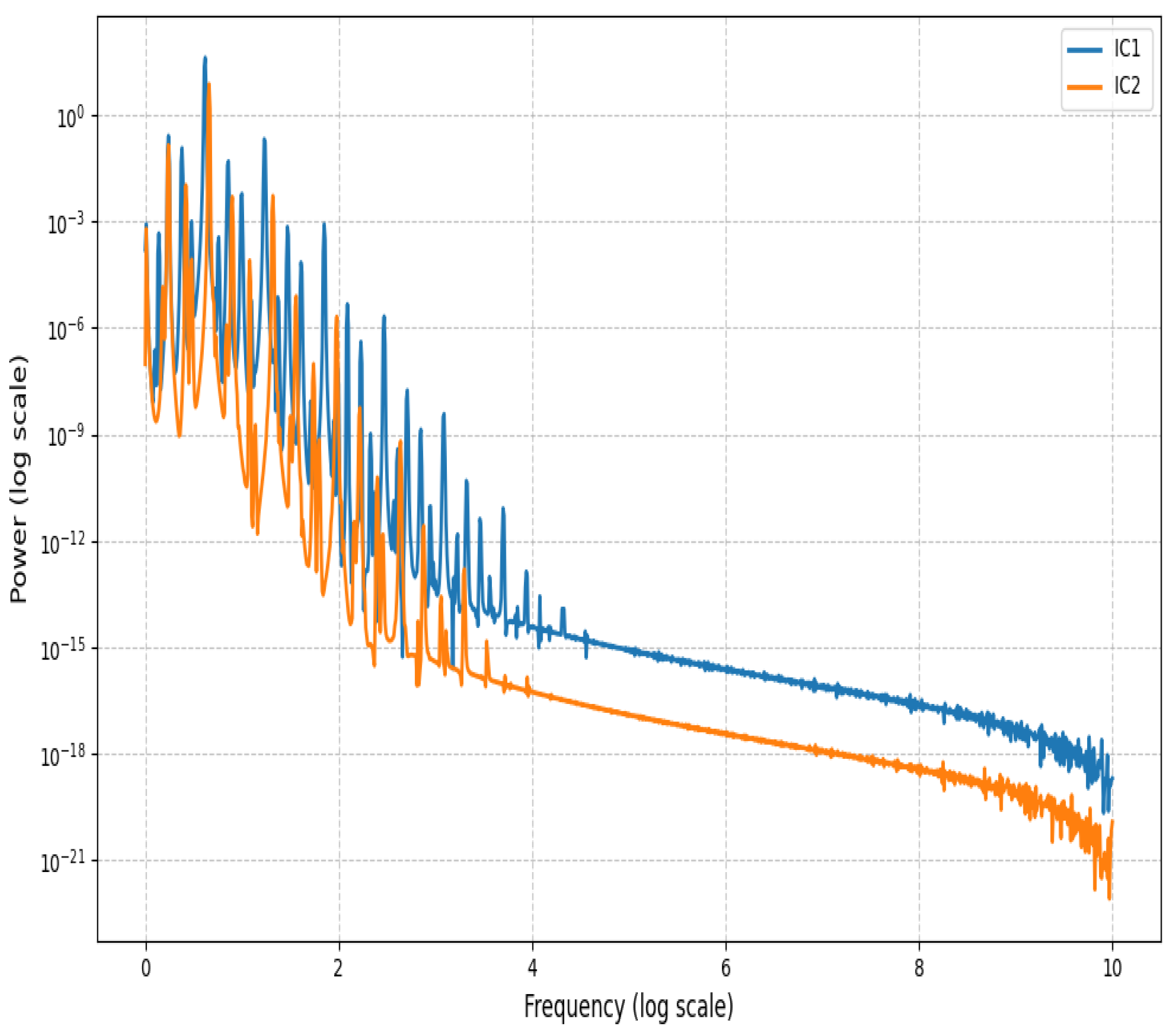
6.2. Power Spectrum
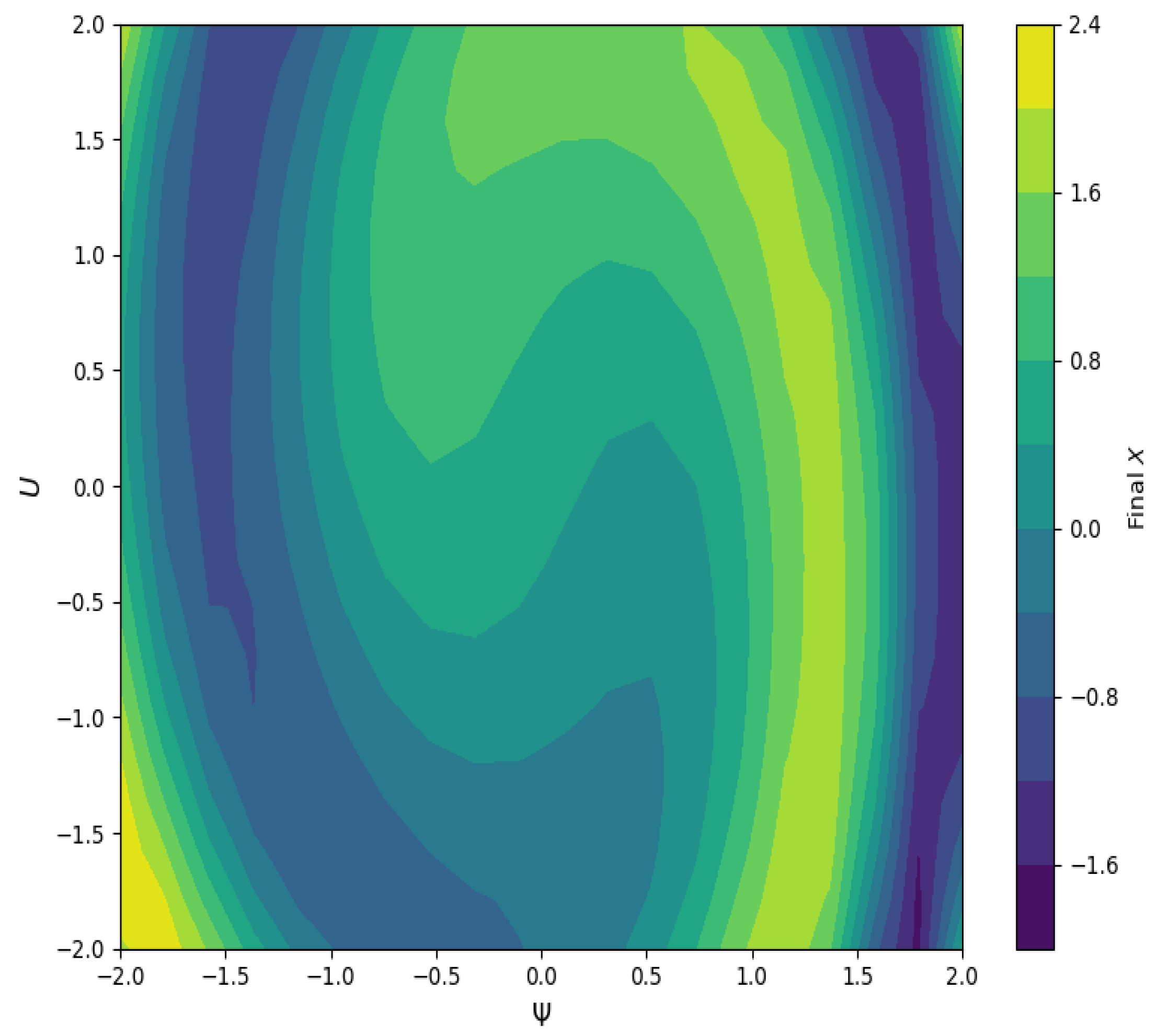
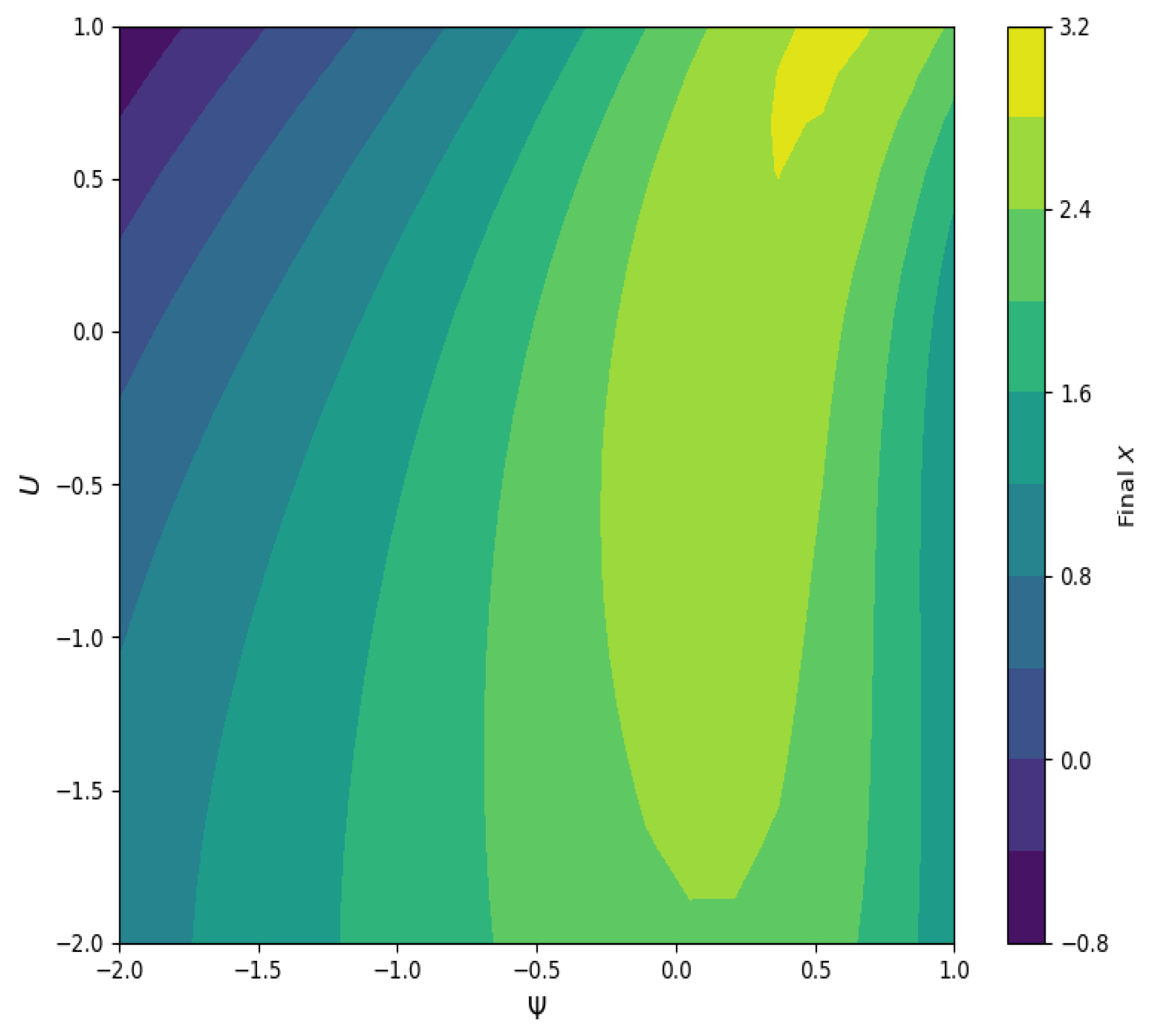
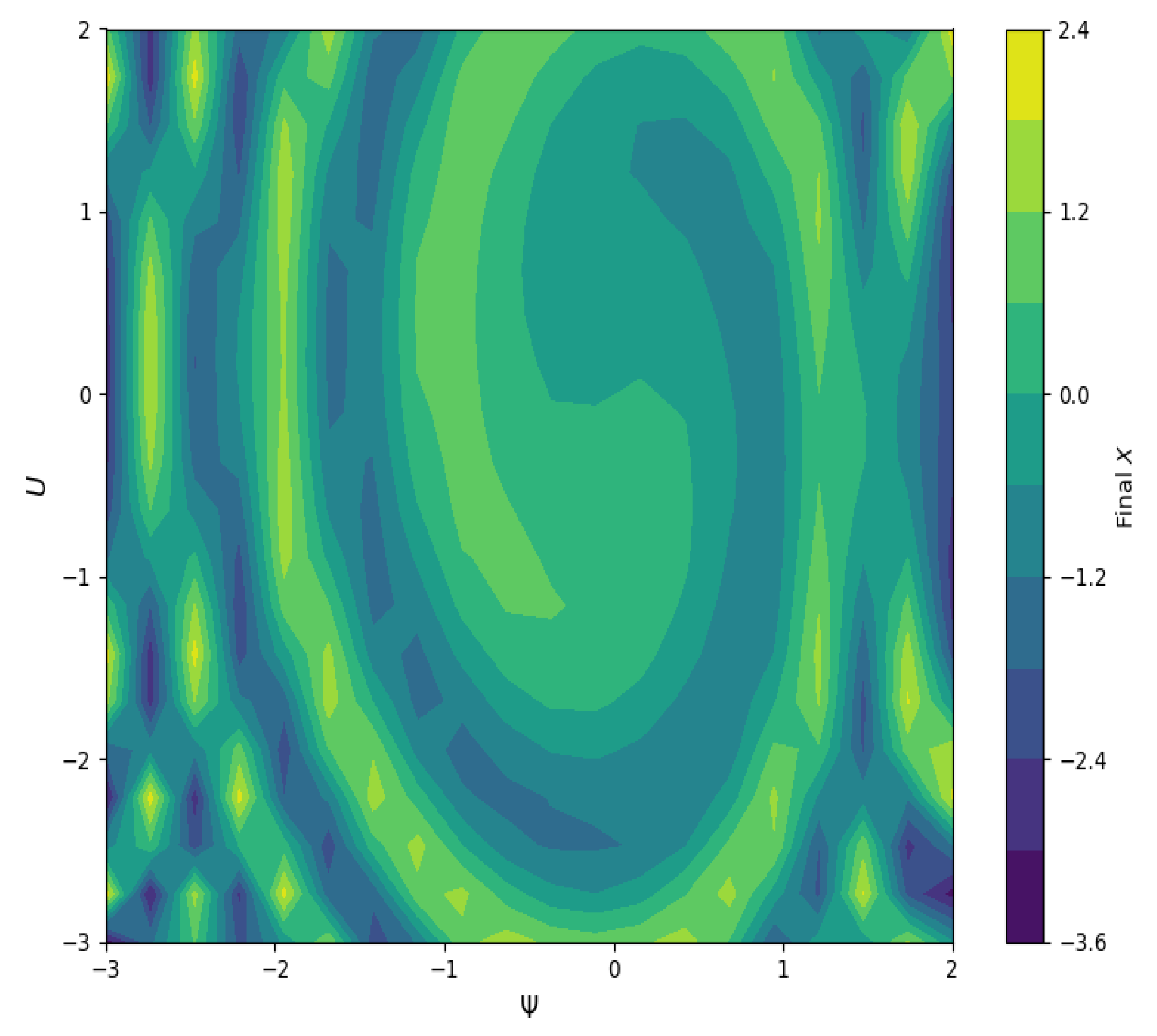
6.3. Basin Attractor
7. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Demirbilek, U.; Nadeem, M.; Çelik, F.M.; Bulut, H.; Şenol, M. Generalized extended (2+1)-dimensional Kadomtsev–Petviashvili equation in fluid dynamics: Analytical solutions. Nonlinear Dyn. 2024, 112, 13393–13408. [Google Scholar] [CrossRef]
- Ecke, R.E. Chaos, patterns, coherent structures, and turbulence: Reflections on nonlinear science. Chaos Interdiscip. J. Nonlinear Sci. 2015, 25, 097605. [Google Scholar] [CrossRef] [PubMed]
- Alshammari, S.; Al-Sawalha, M.M.; Shah, R. Approximate analytical methods for a fractional-order nonlinear system of Jaulent–Miodek equation with energy-dependent Schrödinger potential. Fractal Fract. 2023, 7, 140. [Google Scholar] [CrossRef]
- Nicolis, G. Introduction to Nonlinear Science; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Remond-Tiedrez, A. Nonlinear Partial Differential Equations in Fluid Dynamics: Interfaces, Microstructure, and Stability. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 2020. [Google Scholar]
- Roubíček, T. Nonlinear Partial Differential Equations with Applications; Springer Science & Business Media: Basel, Switzerland, 2013. [Google Scholar]
- Russell, J.S. Report on Waves: Made to the Meetings of the British Association in 1845; John Murray: London, UK, 1845. [Google Scholar]
- Wadati, M. The modified Korteweg–de Vries equation. J. Phys. Soc. Jpn. 1973, 34, 1289–1296. [Google Scholar] [CrossRef]
- Muhammad, J.; Bilal, M.; Rehman, S.U.; Nasreen, N.; Younas, U. Analyzing the decoupled nonlinear Schrödinger equation: Fractional optical wave patterns in the dual-core fibers. J. Opt. 2024, 1–12. [Google Scholar] [CrossRef]
- Murad, M.A.S.; Mahmood, S.S.; Emadifar, H.; Mohammed, W.W.; Ahmed, K.K. Optical soliton solution for dual-mode time-fractional nonlinear Schrödinger equation by generalized exponential rational function method. Results Eng. 2025, 27, 105591. [Google Scholar] [CrossRef]
- Zayed, E.; Alngar, M.; Shohib, R.; Biswas, A.; Yildirim, Y.; Moraru, L.; Georgescu, P.; Iticescu, C.; Asiri, A. Highly dispersive solitons in optical couplers with metamaterials having Kerr law of nonlinear refractive index. Ukr. J. Phys. Opt. 2024, 25, 01001–01019. [Google Scholar] [CrossRef]
- Younas, U.; Muhammad, J.; Murad, M.A.S.; Almutairi, D.; Khan, A.; Abdeljawad, T. Investigating the truncated fractional telegraph equation in engineering: Solitary wave solutions. Results Eng. 2025, 25, 104489. [Google Scholar] [CrossRef]
- Serge, D.Y.; Justin, M.; Betchewe, G.; Crepin, K.T. Optical chirped soliton in metamaterials. Nonlinear Dyn. 2017, 90, 13–18. [Google Scholar] [CrossRef]
- Duan, J.S.; Rach, R.; Baleanu, D.; Wazwaz, A.M. A review of the Adomian decomposition method and its applications to fractional differential equations. Commun. Fract. Calc. 2012, 3, 73–99. [Google Scholar]
- Younas, U.; Muhammad, J.; Ali, Q.; Sediqmal, M.; Kedzia, K.; Jan, A.Z. On the study of solitary wave dynamics and interaction phenomena in the ultrasound imaging modelled by the fractional nonlinear system. Sci. Rep. 2024, 14, 26080. [Google Scholar] [CrossRef]
- Raza, N.; Rani, B.; Chahlaoui, Y.; Shah, N.A. A variety of new rogue wave patterns for three coupled nonlinear Maccari’s models in complex form. Nonlinear Dyn. 2023, 111, 18419–18437. [Google Scholar] [CrossRef]
- Raza, N.; Salman, F.; Butt, A.R.; Gandarias, M.L. Soliton solutions and qualitative analysis concerning to the generalized q-deformed Sinh–Gordon equation. Commun. Nonlinear Sci. Numer. Simul. 2023, 116, 106824. [Google Scholar] [CrossRef]
- Muhammad, J.; Younas, U.; Almutairi, D.; Khan, A.; Abdeljawad, T. Optical wave features and sensitivity analysis of a coupled fractional integrable system. Results Phys. 2025, 68, 108060. [Google Scholar] [CrossRef]
- Zhu, S.-D. The generalizing Riccati equation mapping method in non-linear evolution equation: Application to (2+1)-dimensional Boiti–Leon–Pempinelle equation. Chaos Solitons Fractals 2008, 37, 1335–1342. [Google Scholar] [CrossRef]
- Hosseini, K.; Samadani, F.; Kumar, D.; Faridi, M. New optical solitons of cubic-quartic nonlinear Schrödinger equation. Optik 2018, 157, 1101–1105. [Google Scholar] [CrossRef]
- Mañas, M. Darboux transformations for the nonlinear Schrödinger equations. J. Phys. A Math. Gen. 1996, 29, 7721–7737. [Google Scholar] [CrossRef]
- Gu, Y.; Chen, B.; Ye, F.; Aminakbari, N. Soliton solutions of nonlinear Schrödinger equation with the variable coefficients under the influence of Woods–Saxon potential. Results Phys. 2022, 42, 105979. [Google Scholar] [CrossRef]
- Han, T.; Li, Z.; Li, C. Stationary optical solitons and exact solutions for generalized nonlinear Schrödinger equation with nonlinear chromatic dispersion and quintuple power-law of refractive index in optical fibers. Phys. A Stat. Mech. Appl. 2023, 615, 128599. [Google Scholar] [CrossRef]
- Muhammad, J.; Ali, Q.; Younas, U. On the analysis of optical pulses to the fractional extended nonlinear system with mechanism of third-order dispersion arising in fiber optics. Opt. Quantum Electron. 2024, 56, 1168. [Google Scholar] [CrossRef]
- Ullah, M.S.; Ali, M.Z.; Roshid, H.-O. And diverse chaos-detecting tools for the DSKP model. Sci. Rep. 2025, 15, 13658. [Google Scholar] [CrossRef]
- Vivas-Cortez, M.; Sadaf, M.; Arshed, S.; Rehan, K.; Akram, G.; Saeed, K.; Shmarev, S. Extraction of Optical Solitons for Conformable Perturbed Gerdjikov–Ivanov Equation via Two Integrating Techniques. Adv. Math. Phys. 2024, 2024, 5936389. [Google Scholar] [CrossRef]
- Ali, K.K.; Yokus, A.; Seadawy, A.R.; Yilmazer, R. The ion sound and Langmuir waves dynamical system via computational modified generalized exponential rational function. Chaos Solitons Fractals 2022, 161, 112381. [Google Scholar] [CrossRef]
- Ozdemir, N.; Secer, A.; Ozisik, M.; Bayram, M. Optical soliton solutions of the nonlinear Schrödinger equation in the presence of chromatic dispersion with cubic-quintic-septic-nonic nonlinearities. Phys. Scr. 2023, 98, 115223. [Google Scholar] [CrossRef]
- Atangana, A.; Goufo, E.F.D.; Jafari, H. Extension of matched asymptotic method to fractional boundary layers problems. Math. Probl. Eng. 2014, 2014, 107535. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef]
- Khurshaid, A.; Khurshaid, H. Comparative Analysis and Definitions of Fractional Derivatives. J. Biomed. Res. Environ. Sci. 2023, 4, 1684–1688. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, D.; Alsaedi, A. Analysis of time-fractional Hunter–Saxton equation: A model of nematic liquid crystal. Open Phys. 2016, 14, 145–149. [Google Scholar] [CrossRef]
- Sahoo, S.; Ray, S.S. Invariant analysis with conservation law of time fractional coupled Ablowitz–Kaup–Newell–Segur equations in water waves. Waves Random Complex Media 2020, 30, 530–543. [Google Scholar] [CrossRef]
- Sun, J. Variational principle and solitary wave of the fractal fourth-order nonlinear Ablowitz–Kaup–Newell–Segur water wave model. Fractals 2023, 31, 2350036. [Google Scholar] [CrossRef]
- Thadee, W.; Chankaew, A.; Phoosree, S. Effects of wave solutions on shallow-water equation, optical-fibre equation and electric-circuit equation. Maejo Int. J. Sci. Technol. 2022, 16, 262–274. [Google Scholar]
- Eskitaşçıoğlu, E.İ.; Aktaş, M.B.; Baskonus, H.M. New Complex and Hyperbolic Forms for Ablowitz–Kaup–Newell–Segur Wave Equation with Fourth Order. Appl. Math. Nonlinear Sci. 2019, 4, 93–100. [Google Scholar] [CrossRef]
- Zafar, A.; Saboor, A.; Inc, M.; Ashraf, M.; Ahmad, S. New fractional solutions for the Clannish Random Walker’s Parabolic equation and the Ablowitz–Kaup–Newell–Segur equation. Opt. Quantum Electron. 2024, 56, 581. [Google Scholar] [CrossRef]
- Dusunceli, F. New exact solutions for Ablowitz–Kaup–Newell–Segur water wave Equation. Sigma 2019, 10, 171–177. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muhammad, J.; Tedjani, A.H.; Hussain, E.; Younas, U. Investigating Chaotic Techniques and Wave Profiles with Parametric Effects in a Fourth-Order Nonlinear Fractional Dynamical Equation. Fractal Fract. 2025, 9, 487. https://doi.org/10.3390/fractalfract9080487
Muhammad J, Tedjani AH, Hussain E, Younas U. Investigating Chaotic Techniques and Wave Profiles with Parametric Effects in a Fourth-Order Nonlinear Fractional Dynamical Equation. Fractal and Fractional. 2025; 9(8):487. https://doi.org/10.3390/fractalfract9080487
Chicago/Turabian StyleMuhammad, Jan, Ali H. Tedjani, Ejaz Hussain, and Usman Younas. 2025. "Investigating Chaotic Techniques and Wave Profiles with Parametric Effects in a Fourth-Order Nonlinear Fractional Dynamical Equation" Fractal and Fractional 9, no. 8: 487. https://doi.org/10.3390/fractalfract9080487
APA StyleMuhammad, J., Tedjani, A. H., Hussain, E., & Younas, U. (2025). Investigating Chaotic Techniques and Wave Profiles with Parametric Effects in a Fourth-Order Nonlinear Fractional Dynamical Equation. Fractal and Fractional, 9(8), 487. https://doi.org/10.3390/fractalfract9080487