1. Introduction
The phenomenon of repeated discontinuous yielding in materials, a critical topic in materials science, addresses fundamental questions about material stability and deformation. This behavior appears as serrations (commonly known as jerky flow or the Portevin-Le Chatelier effect) on the stress-strain curve, depending on whether the material is subjected to a constant strain rate or a constant stress rate. In the early 1980s, Ananthakrishna et al. [
1] proposed a nonlinear dynamical model to describe this phenomenon, based on the interactions and transformations between mobile dislocations, immobile dislocations, and dislocations surrounded by solute atom clouds. This model is expressed as:
where
represent scaled densities of mobile, immobile, and solute-atom-surrounded dislocations, respectively.
The parameters and c represent the generation rate of dislocations acquiring solute atom clouds, the mobilization rate of immobile dislocations due to applied stress or thermal activation, and the transformation rate from immobile dislocations to those with solute atom clouds, respectively. The parameter k quantifies the conversion rate between mobile and immobile dislocations, with for a given stress level and temperature. Through stability analysis of equilibrium points and phase plane techniques, Ananthakrishna et al. demonstrated the existence of limit cycles, leading to jumps in creep curves.
While the classical Ananthakrishna model effectively captures periodic and chaotic behaviors for certain parameters, it assumes continuous and uniform dislocation transitions, as well as constant velocities for dislocations interacting with solute atoms. In practical scenarios, however, dislocation transitions often occur discontinuously, and the mobility of solute-surrounded dislocations diminishes over time. Such simplifications limit the model’s fidelity in capturing realistic dislocation dynamics. Furthermore, the advent of discrete dislocation dynamics simulations, which have proven to be powerful tools for studying plastic deformation in nano- and micro-scale crystalline materials, has highlighted the need for refined frameworks that incorporate these discrete dynamics for greater accuracy and broader applicability. To better reflect these complex, non-uniform phenomena, we introduce fractional-order derivatives into the Ananthakrishna model, enabling the incorporation of memory effects and improving its descriptive capability. Recent simulation studies have shown that memory effects are intrinsic to dislocation dynamics. For example, a variable-order fractional framework was employed in [
2] to simulate the sliding and coalescence of edge dislocations without any a priori assumptions on their paths, showing that their dynamics depend on the entire stress history. More broadly, fractional relaxation models [
3] and nonlinear oscillators governed by fractional operators [
4] have been shown to effectively capture path-dependent and hereditary behaviors in complex materials.
In recent decades, fractional-order differential equations have emerged as powerful tools for modeling processes characterized by memory, hereditary properties, and non-local interactions [
5,
6,
7,
8]. Historically, the mathematical formalism of fractional derivatives can be linked to the integro-differential equations of Volterra [
9], who was engaged in the study of hereditary processes and their applications in various scientific fields. This perspective is further elaborated in the modern framework of fractional calculus, such as in [
10], providing a solid scientific and historical basis for modeling memory-related phenomena. Compared to traditional integer-order derivatives, fractional derivatives offer greater flexibility and accuracy in describing complex phenomena such as chaotic dynamics, anomalous diffusion, and viscoelastic behaviors, and have found broad applications across mechanics, biology, materials science, and finance [
11,
12,
13,
14,
15,
16]. In addition, recent studies have shown that fractional-order models can also exhibit rich multistability phenomena, where multiple attractors coexist under the same set of parameters but different initial conditions. For instance, ref. [
17] demonstrated that discretization with variable symmetry can induce multistability in fractional chaotic systems, while [
18] reported extreme multistability in a fractional-order discrete-time neural network. Therefore, extending the Ananthakrishna model into a fractional-order framework provides a promising approach to capture the intricate, memory-dependent dislocation behaviors observed during repeated yielding.
From a numerical perspective, solving fractional-order differential equations poses challenges due to their inherent non-locality. Various time discretization methods have been developed for such problems [
19,
20,
21,
22,
23,
24,
25,
26,
27,
28]. Among them, the L1-type schemes [
19,
20,
21,
22], the L1-2 scheme [
23], the L2-
scheme [
24], and the L2 scheme [
25] employ piecewise linear or higher-order interpolations to construct efficient and easy-to-implement approximations. In addition, modified schemes have been proposed to better handle initial singularities [
26,
27], while stochastic approaches such as Monte Carlo method [
28] provide an alternative probabilistic framework. Although these methods are widely used and offer good approximation accuracy, they typically involve significant computational and memory requirements. To alleviate these drawbacks, recent advancements have focused on accelerating kernel evaluations through techniques such as multipole expansions [
29,
30] and sum-of-exponentials (SOE) approximations [
31,
32,
33,
34]. Such approaches have enabled low-storage, high-efficiency numerical schemes [
35,
36]. Building on these advancements, we propose an accelerated L1-based numerical scheme tailored specifically for the fractional-order Ananthakrishna model, significantly reducing computational cost while preserving numerical accuracy.
This study aims to construct a computationally efficient numerical scheme for the fractional-order Ananthakrishna model and explore its dynamic behaviors. The main contributions of the paper include:
Proposal and analysis of a novel fractional-order Ananthakrishna model: Equilibrium stability under varying fractional derivative orders and parameter regimes is comprehensively investigated using fractional stability criteria, largest Lyapunov exponents, and bifurcation analysis.
Development of a fast semi-implicit numerical scheme: An accelerated numerical discretization method is designed, along with rigorous stability proofs to guarantee its numerical robustness and reliability.
Integration with the Orowan equation: By combining the fractional-order Ananthakrishna model with the Orowan equation for applied stress evolution, four types of repeated yielding patterns, including staircase creep on stress-time curves, are identified.
This paper is organized as follows:
Section 2 revisits equilibrium points and stability criteria for the classical Ananthakrishna model.
Section 3 introduces the fractional-order extension and analyzes the local asymptotic stability of equilibria via fractional stability theory.
Section 4 presents a fast numerical discretization strategy utilizing the accelerated L1 scheme and rigorously examines its numerical stability. Numerical simulations in
Section 5 validate the proposed method’s accuracy, stability, and computational advantages through comparisons with traditional methods.
Section 6 demonstrates practical applications of the fractional-order framework combined with the Orowan equation to reproduce realistic stress-time behaviors observed during repeated yielding. Finally,
Section 7 concludes the paper by summarizing key findings and implications.
2. Stability of Ananthakrishna Model
In this section, we briefly review the equilibrium points of the classical Ananthakrishna model (
1) and specify the parameter value ranges in which these equilibrium points exhibit instability. As a reminder, the variables
x,
y, and
z represent the scaled densities of mobile, immobile, and solute-atom-surrounded dislocations, respectively (see Introduction). First, it is evident that model has a trivial equilibrium point at the origin
. For the nontrivial equilibrium points
, the following algebraic system is satisfied:
By eliminating
y and
z, the variable
x satisfies the quadratic equation
Thus, model (
1) possesses two distinct nontrivial equilibrium points, denoted as
and
, explicitly given by:
and
where
,
.
The local stability of these equilibrium points is governed by the eigenvalues of the Jacobian matrix of model (
1), evaluated at
:
The corresponding characteristic polynomial for the eigenvalues
is thus given by:
which can be compactly expressed as
where, for ease of notation, we define:
The characteristic polynomial (
5) is solved analytically, and the Routh–Hurwitz criteria are used to determine local stability.
We first observe that the trivial equilibrium
is always unstable, since for this point
, implying at least one eigenvalue with a positive real part. For the nontrivial equilibria
and
, their stability critically depends on the model parameters
. Previous studies, particularly [
1], rigorously identified parameter regimes of instability for the special case
, explicitly summarized as follows:
where the bounds
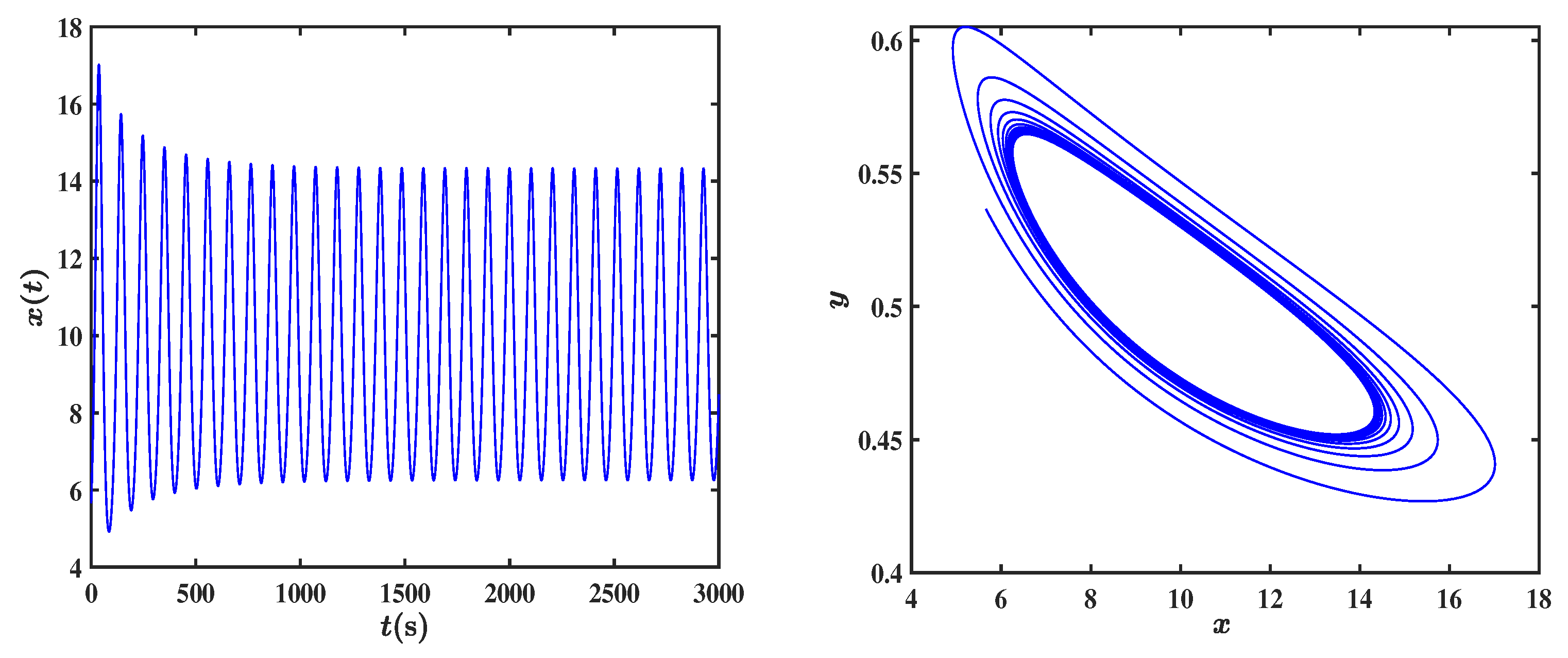
are explicitly computed cutoff values that delineate stable and unstable regions. The time evolution and phase portrait of the
component are shown in
Figure 1, with the parameters set
,
,
,
.
The presence of wide instability domains motivates extending the original integer-order model to a fractional-order framework. By replacing integer-order derivatives with fractional derivatives, one can effectively capture memory effects and nonlocal interactions inherent in real-world dislocation dynamics. The fractional-order generalization, introduced in the next section, will allow a broader range of dynamical behaviors, significantly enlarging the stability regions and more accurately reflecting experimental observations.
3. Fractional-Order Ananthakrishna Model
The fractional-order generalization of the Ananthakrishna model is defined as follows:
where
are Caputo derivatives, defined by [
37,
38]:
The initial values are taken in accordance with the corresponding integer-order model.
To analyze the stability of model (
7), we use the following fractional-order stability criterion, which has been widely adopted in the analysis of fractional-order dynamical models [
39].
Theorem 1 ([
40]).
Consider the incommensurate fractional-order modelwith fractional orders , and . An equilibrium point of model (9), found by solving , is locally asymptotically stable if all eigenvalues λ of the Jacobian matrix at this point satisfy: We first illustrate the stability characteristics of the integer-order model by selecting parameters
,
,
, and
. Under these conditions, model (
1) possesses three equilibrium points:
Eigenvalue computations confirm that all three equilibria are unstable. Specifically, at , the eigenvalues of the Jacobian are and . The positive real parts of render a saddle-focus equilibrium, thus unstable.
For the fractional-order model, Theorem 1 implies that
is stable if
leading to a stability condition
. Similarly,
becomes stable when
. These observations highlight a critical distinction: while the classical model is entirely unstable, the fractional model demonstrates conditional stability under appropriate choices of
.
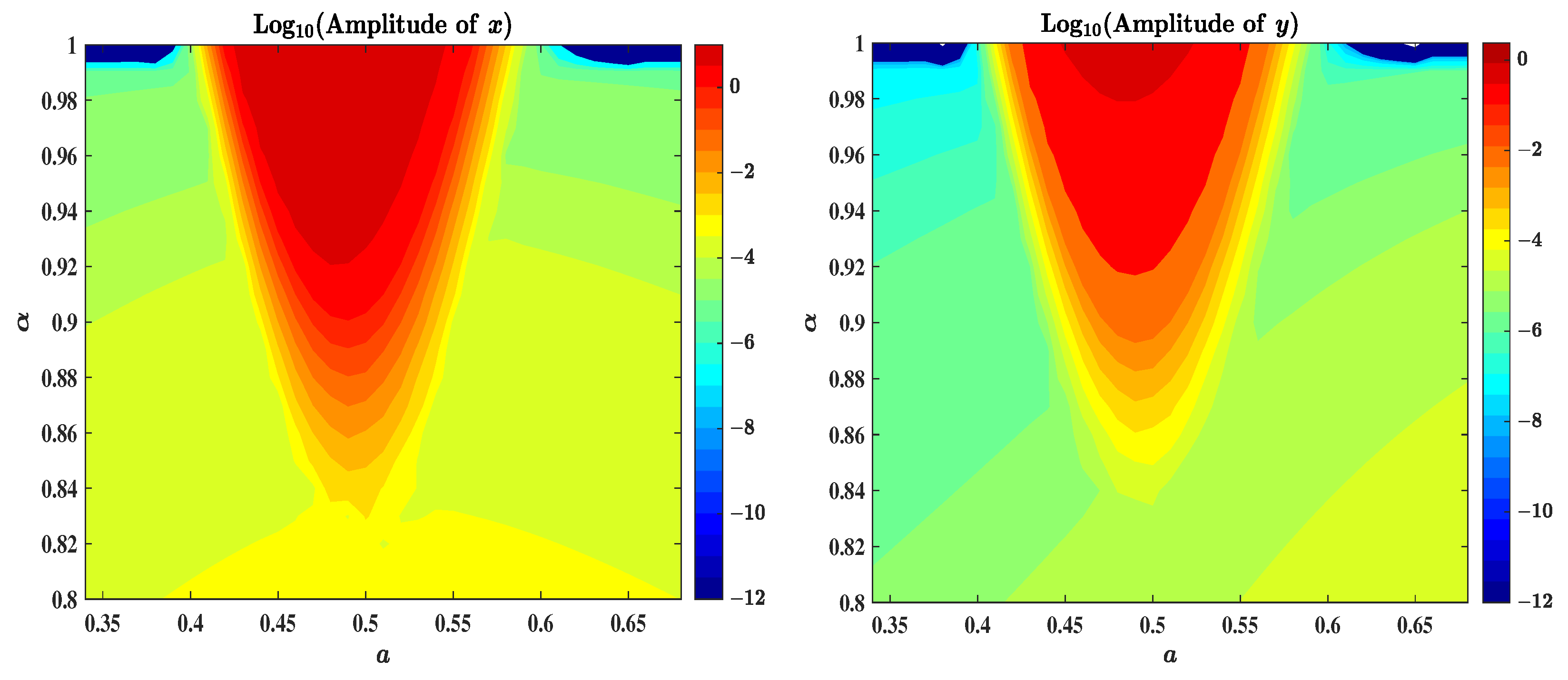
To further explore the effect of fractional-order derivatives on stability, we investigate how the supremum of fractional-order stability,
, changes with respect to parameters
a and
b, respectively.
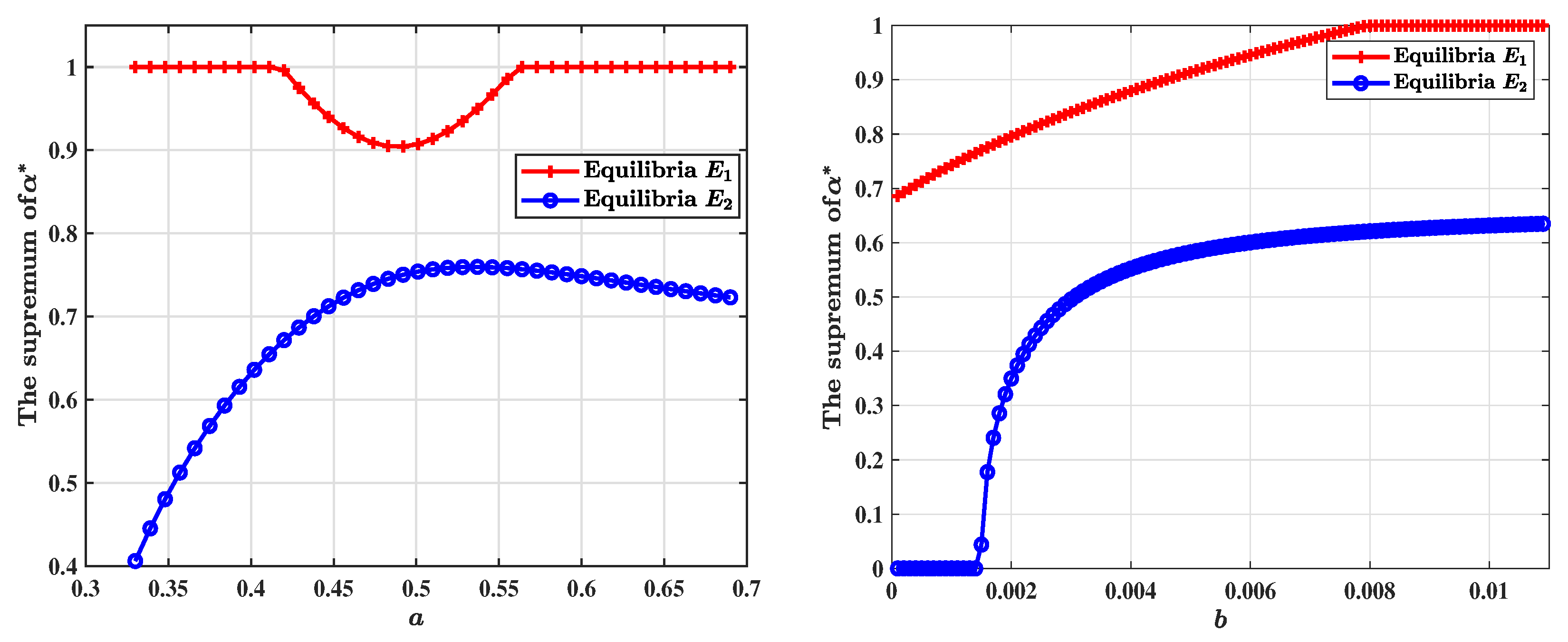
Figure 2 shows the variation of the critical fractional-order threshold
for equilibria
and
: the left panel demonstrates the dependence on parameter
a within the range
with fixed parameters
,
and
, while the right panel shows the variation with respect to parameter
b in the range
, with fixed parameters
,
and
.
From these plots, we observe that equilibrium consistently displays smaller critical and wider margin values compared to , indicating greater sensitivity to fractional-order effects. Specifically, at equilibrium , the supremum of remains mostly below when varying a, and generally below when varying b. In contrast, equilibrium exhibits significantly higher robustness, with values consistently above across both parameter variations. For example, at the representative point (left panel), the stability threshold at equilibrium is , signifying stability for fractional orders below this critical value. Similarly, the right panel clearly illustrates that equilibrium maintains large critical values even as b approaches the upper limit of its investigated range, highlighting the general capability of the fractional-order model to substantially extend stability regions compared to its integer-order counterpart.
4. Fast Finite Difference Approximation for Fractional Ananthakrishna Model
In this section, we propose a computationally efficient numerical scheme for the fractional Ananthakrishna model (
7), based on an accelerated approximation of the Caputo fractional derivative. The primary idea leverages a fast L1 operator which, although widely applied, is briefly described below for completeness and clarity.
Consider a uniform partition of the interval
into
N subintervals with time step size
, and define
,
. To approximate the Caputo derivative
, the classical L1 scheme employs piecewise linear interpolation over each subinterval:
The corresponding L1 approximation of
is given by [
20]:
with coefficients
. This scheme captures the non-local memory effect of fractional derivatives, as the computation at
depends on all previous steps. However, direct implementation has computational complexity
and storage complexity
, which are prohibitive for large
N.
To enhance computational efficiency, we adopt the accelerated L1 approach, decomposing
into local and history components:
where
The local
is approximated as:
For the history term
, integration by parts gives
The kernel function
is efficiently approximated by a sum-of-exponentials (SOE) with any prescribed error tolerance
[
31]:
where the number of terms
is significantly smaller than
N. This decomposition replaces the direct evaluation of convolution history with a sum of
exponentials that can be computed recursively, significantly reducing both memory usage and CPU time. Incorporating this approximation, we obtain
with the history integral approximated recursively as
where the positive coefficients
are explicitly given by integrals over exponential kernels:
Thus, we define the fast fractional operator
as:
where
, and for
,
As shown in [
31], the truncation error of the fast finite difference operator
is of order
, provided that
. Compared to the direct L1 scheme, while maintaining the same level of convergence accuracy, this fast scheme reduces the storage cost from
to
and computational cost from
to
.
Now applying this accelerated L1 discretization to the fractional Ananthakrishna model (
7), we derive the semi-implicit numerical scheme:
This implicit discretization can be rearranged and computed efficiently in a decoupled manner. In fact, the expression of
defined in (
17) can be rewritten as
where the coefficient
,
represents the history terms. Then the discrete problem (
19) can be equivalently expressed by
Substituting the second equation into the right side of the first one, the discrete problem can be decouplly computed as follows:
The following lemma guarantees the positivity of the numerical solutions.
Lemma 1. Assume that the initial values of the fractional Ananthakrishna model (7) are positive and the time step size h is sufficiently small. Suppose further that . Then, for all , the numerical solutions generated by the scheme (19) remain positive. Proof. We proceed by mathematical induction. Assume that , and for all .
We first show that
. By substituting the expression for
from the first equation of (
21) into the second equation, we obtain
From the positivity of the coefficients
in (
16) and the recurrence relation for the history term
in (
18), it follows that all
for
. Consequently, the history terms
defined in (
20) are strictly positive. Since all quantities in the numerator and denominator of the above expression for
are positive, we conclude that
.
Next, we consider the positivity of
. From the definition of
, we have
. Substituting this into the expression for
in (
21), the numerator satisfies the bound:
If
, then the bracketed term is positive, and thus
. If instead
, define
. Then the positivity of
is ensured provided that the time step size
h satisfies the constraint
Finally, the positivity of
follows immediately from the third equation in (
21), as it is computed from positive values of
. □
Remark 1. The constraint on the time step size h imposed in (24) is mild. Indeed, the denominator of the inequality contains the term , the maximum value of the numerical solution . As will be demonstrated rigorously in the subsequent stability analysis, the numerical solution remain bounded above, with a bound dependent explicitly on initial conditions, model parameters, and fractional orders of derivatives. Furthermore, numerical experiments in the following section consistently show that rapidly converges to its equilibrium value (approximately ) after initial transient oscillations, rarely exceeding the value 1. Consequently, the upper bound condition for h is easily satisfied in practice, making this restriction effectively negligible for typical numerical simulations. Notably, as , the constraint on h given in (24) remains mild, since it converges to a finite positive constant , thereby avoiding any sharp deterioration in the allowed time step. The following property is useful in the stability analysis.
Lemma 2 ([
31]).
For any mesh function defined on , the following inequality holds: for , The stability of the proposed numerical scheme is established by the following theorem.
Theorem 2. Suppose that the parameters satisfy , and , and let the SOE approximation error ε be sufficiently small. Then the numerical solution of the discrete model (19) is stable and satisfies the following estimate for any :where , . Proof. Multiplying the first two equations of (
19) by
and
, respectively, and summing from
to
n, we obtain
Adding these two equalities, discarding nonnegative terms, and employing Lemma 1 and Young’s inequality yield
Utilizing Lemma 2, the above estimate simplifies to
Next, multiplying the third equation in (
19) by
, summing over
, and using similar arguments yield
Furthermore, multiplying the first equation by
, summing similarly, gives the following bound:
Substituting this into the previous inequality for
, we have
Combing (
28) with (
29) and noting that
and
for
, we derive
Applying the discrete Gronwall lemma, we obtain the desired stability estimate (
26). The proof is completed. □
6. Application in Repeated Yielding
The Ananthakrishna model was originally proposed to explain the serrated plastic flow observed during repeated yielding or creep, manifesting as characteristic patterns in stress-time curves [
1]. These serrations, classified into types A, B, C, and D, reflect the underlying dislocation dynamics. In this section, we demonstrate the capability of the proposed fractional-order model to reproduce and differentiate these behaviors.
The stress evolution is governed by the Orowan equation, describing the relationship between stress and plastic strain rate:
where
is the applied stress,
the applied strain rate,
the effective compliance, and
the plastic strain rate. Here,
, with
d denoting the magnitude of the Burgers vector. The dislocation densities
,
, and
evolve according to:
where
and
represent mobile, immobile, and solute-surrounded dislocation densities, respectively. The model (
32) can be recast into a dimensionless form by using scaled variables to derive model (
1):
We integrate the discrete model (
19) along with the Orowan equation to investigate stress-time curves under different conditions. The parameter set is based on Ref. [
42], which demonstrated that these values, when used in the integer-order forced Ananthakrishna model, could generate four distinct stress–time serration types. The parameters are set as
,
,
,
,
,
,
,
,
, and
.
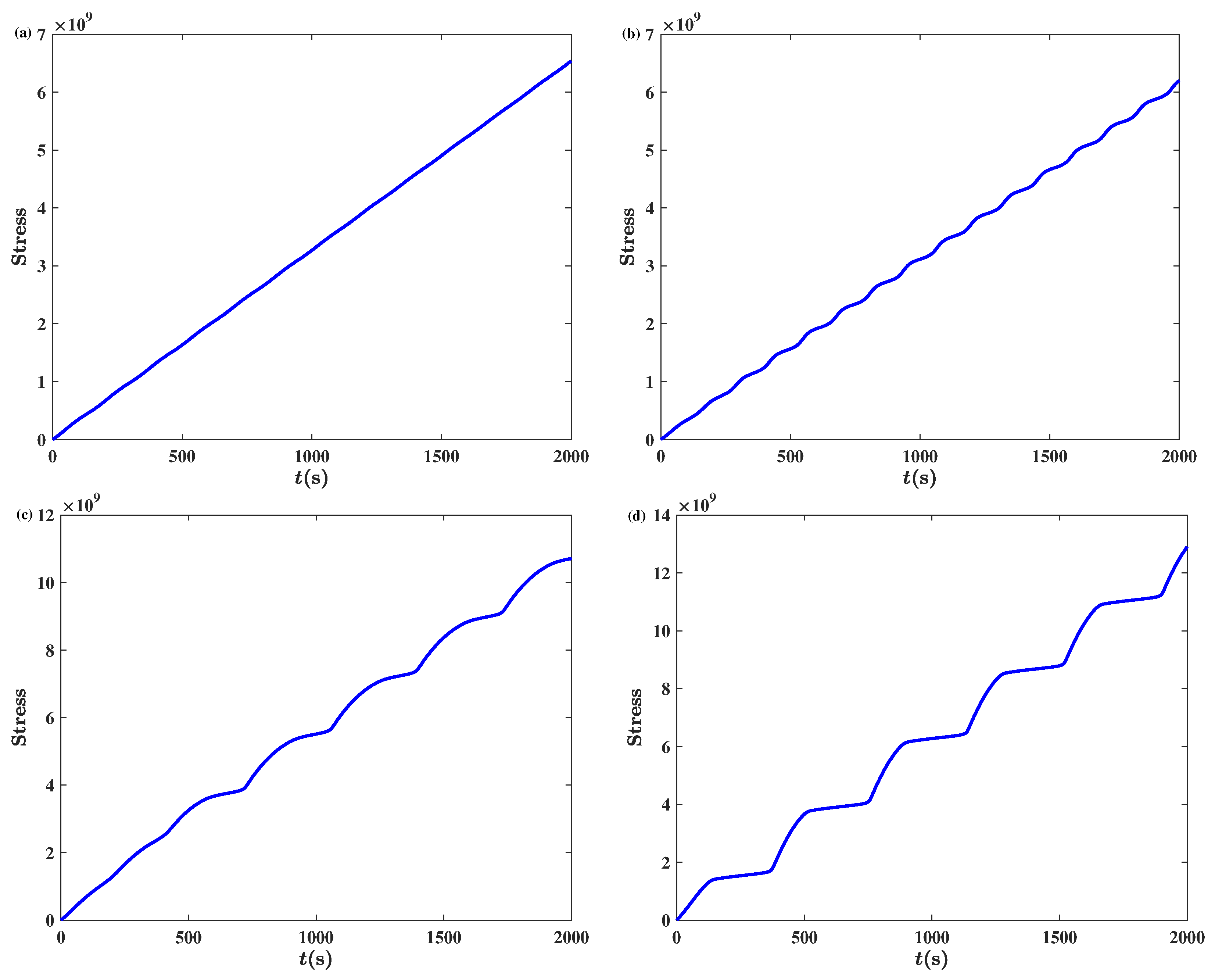
Figure 14a,b illustrate the transition of stress-time responses as the fractional order
increases, with other parameters fixed at
,
,
, and
. Type B behavior (
Figure 14b) emerges at
, which exceeds the critical stability threshold (
). This regime exhibits large, irregular serrations, reflecting strong nonlinear interactions and dynamic instability.
Figure 14c,d explore the impact of varying the conversion rate parameter
k on stress-time patterns at
, with
,
,
. As
k decreases from
to
, the transition from mobile to immobile dislocations slows down, leading to the emergence of staircase creep (Type C and D behavior). Notably, the simulated Type A and Type D behaviors observed in
Figure 14a,d show qualitative agreement with experimental results reported in Ref. [
43], where similar jerky flow and staircase-like yielding patterns are documented in
Figure 1(right) and
Figure 2(left), respectively. This phenomenon is characterized by increasing amplitude and decreasing frequency, where elastic energy is stored during the horizontal stages and released during vertical jumps, leading to sudden increases in repeated yielding.
7. Conclusions
In this paper, we introduced and analyzed a novel fractional-order Ananthakrishna model, focusing on its stability characteristics, dynamic behaviors, and computational efficiency. The threshold is analytically determined based on the stability criterion, offering a quantitative indicator of the onset of instability. Combined with bifurcation analysis and Lyapunov exponents, we systematically investigated the stability of equilibrium points, particularly highlighting the extended stability regions compared to the original integer-order model. To facilitate efficient numerical studies, we developed a computationally effective finite difference scheme based on the accelerated L1 method, significantly reducing both computational and storage complexities. Extensive numerical experiments demonstrated that the fractional-order model exhibits rich dynamics, including stable equilibria, periodic solutions, and distinct transitions as fractional orders cross critical thresholds. Moreover, comparisons with conventional numerical methods confirmed the superiority of our accelerated L1 scheme, especially in handling long-term simulations. Finally, we employed the fractional-order framework to reproduce diverse experimental stress-time behaviors associated with repeated yielding, emphasizing its potential utility in capturing realistic physical phenomena. The proposed fractional-order framework is particularly suited for materials and systems exhibiting memory, nonlocality, or anomalous relaxation behavior. Typical examples include viscoelastic materials, dielectric media, and porous structures, where conventional integer-order models may fail to capture the long-term dynamics accurately. These findings suggest broad applicability of the method in complex physical and engineering systems.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}