
Averaged Systems of Stochastic Differential Equations with Lévy Noise and Fractional Brownian Motion

 ,
,  and
and
Abstract
1. Introduction
2. Background Tools
- Right continuous: .
- The completeness: Each contains all -null sets in ).
- (i)
- (ii)
- has independent and stationary increments.
- (iii)
- is stochastically continuous
2.1. Fractional Brownian Motion and Long-Range Dependence
- (i)
- (ii)
- Zero mean:
- (iii)
- Covariance function:
- 1.
- When fractional Brownian motion reduces to standard Brownian motion.
- 2.
- Given that the fractional Brownian motion is not a semi-martingale unless , Itô calculus does not apply directly.
- 3.
- Self-similarity:
- 4.
- Stationary increments:
- 5.
- Long-range dependence:
- (a)
- If : Positive correlation (persistence), it can be applied in Riemann–Stieltjes integrals.
- (b)
- If : Negative correlation (anti-persistence), it can be applied in Rough path theory, especially when .
- (1)
- The symmetric integral of with respect to is given as the limit in the probability as forprovided that this limit is present in the probability given by
- (2)
- The forward integral of with respect to is defined as the limit in the probability when ofprovided that this limit is present in the probability given by
- (3)
- The backward integral of with respect to is defined as the limit in probability as ofprovided that this limit is present in the probability given by
- 1.
- is the drift vector.
- 2.
- represents Brownian motion part (with diffusion coefficient σ).
- 3.
- is the Poisson random measure counting jumps of size x.
- 4.
- is the compensated Poisson random measure.
- 5.
- is the Lévy measure, satisfying
2.2. Fractional Brownian Motion and Lévy Process for Stochastic Differential Equations
- (1)
- is -adapted .
- (2)
- satisfies that for , a.e. ,
- . Non-lipschitz condition: For fixed , let and be continuous in , then and a continuous non-decreasing function are concave for each in which the following properties hold:for all , and where ∨ denotes the maximum.
3. Averaging Principle
- Prove the existence and uniqueness of solutions to SDEs with Poisson jumps.
- Derive moment bounds of solutions.
- Estimate convergence rates of numerical schemes (like Euler–Maruyama with jumps).
- Control the error between exact and approximate solutions via moment estimates of stochastic integrals.
- Most common and natural choice.
- Aligns with Itô isometry and simplifies the analysis.
- Appropriate for most theoretical and practical applications.
- Gives strong convergence in .
- Uniform integrability of approximations.
- Almost sure convergence via Kolmogorov-type criteria.
- But constants c increase, making estimates looser.
- Requires more regularity (e.g., higher moments of jumps must exist).
- Useful when coefficients or noise are only weakly integrable.
- May allow convergence proofs under weaker assumptions.
- Limitation: Offers weaker control over the supremum (less useful for stability or uniform convergence).
- Higher :
- 1-
- Stronger convergence norm (better control over paths).
- 2-
- Potentially worse rate constants (larger c).
- Lower :
- 1-
- Weaker convergence, but better constants and possibly faster decay.
- 2-
- May not be sufficient for applications needing uniform convergence or higher-moment bounds.
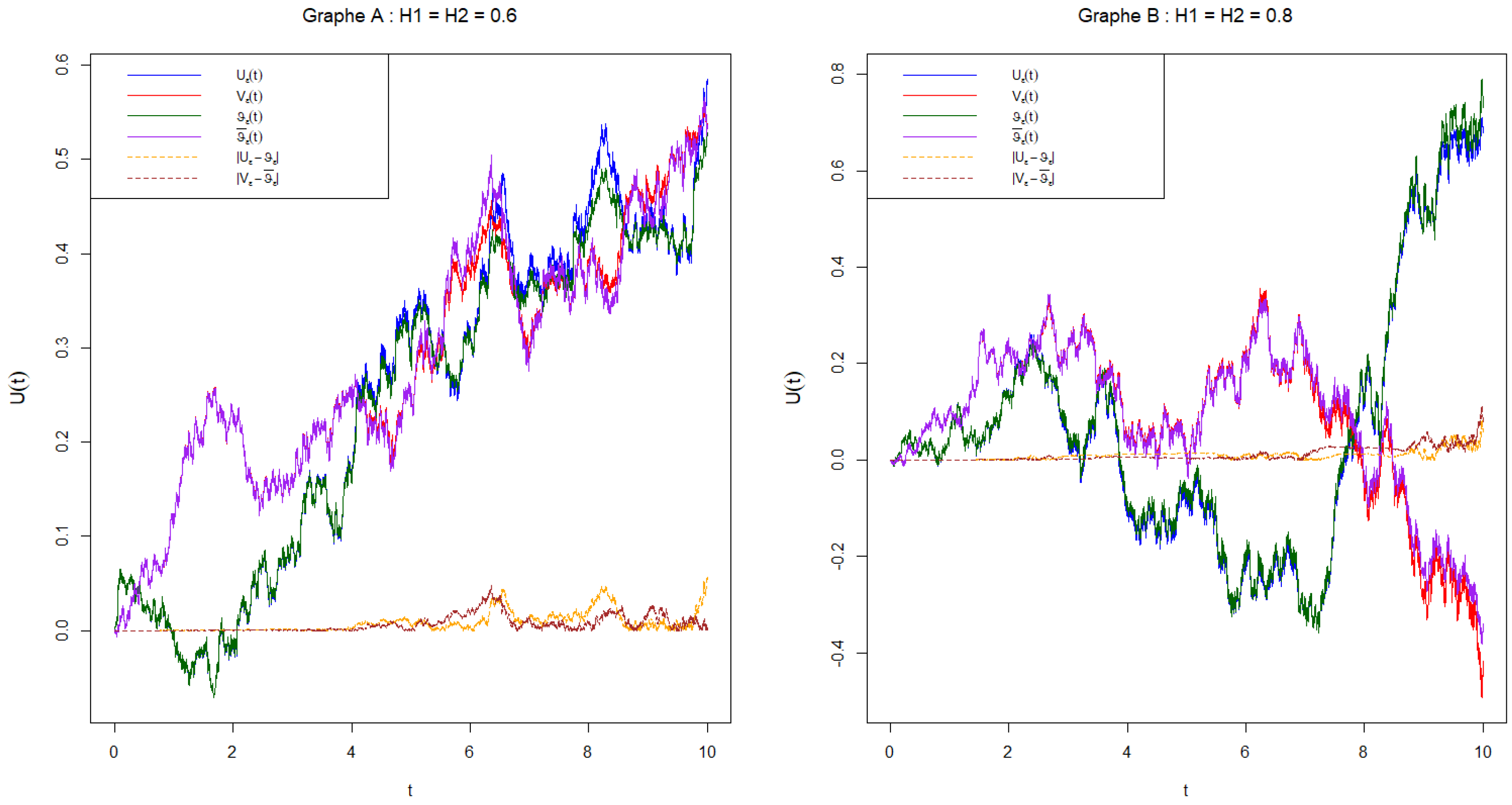
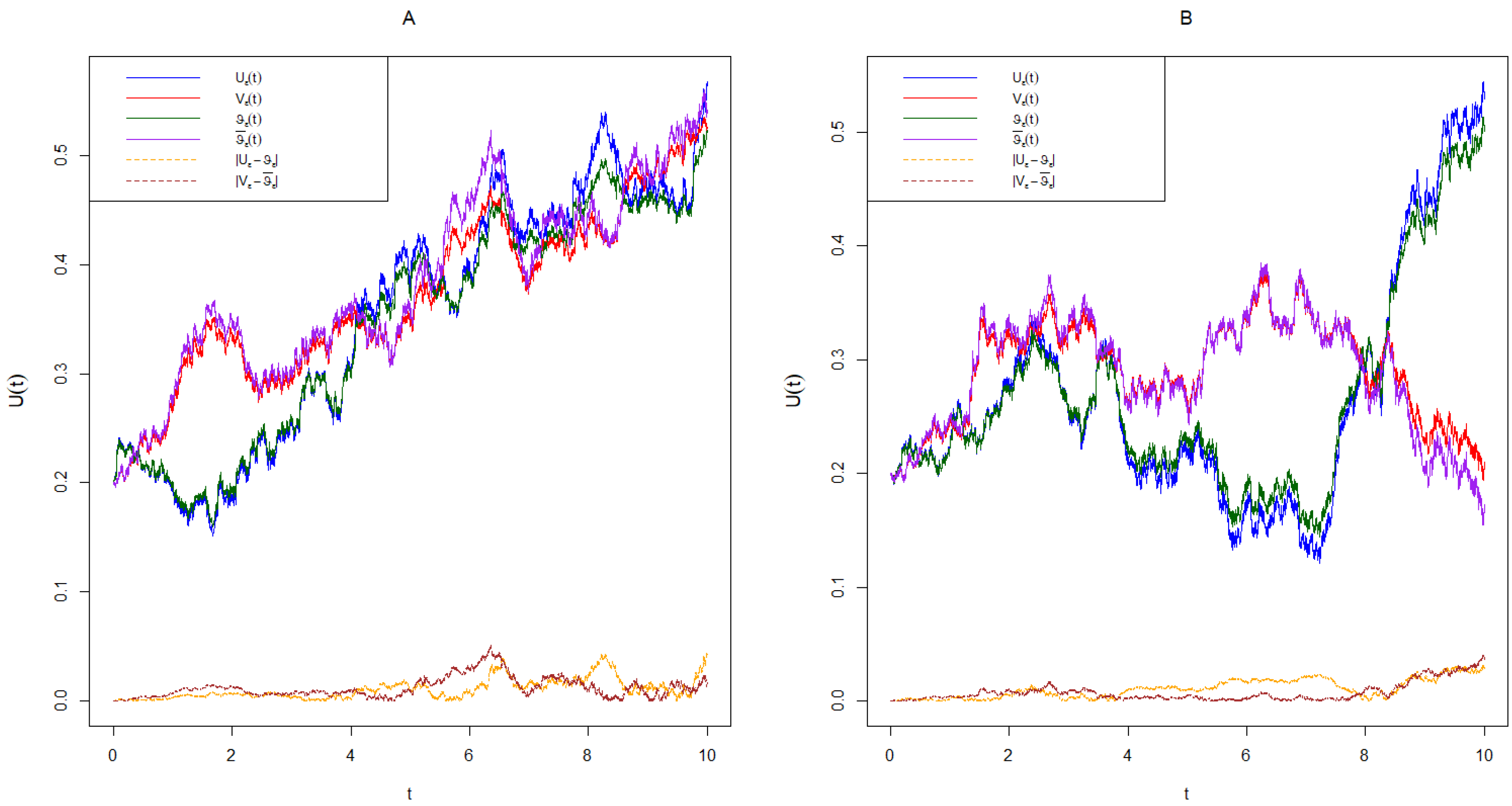
4. An Example
4.1. Example 1
- and : Hurst parameters related to the roughness of the fractional Brownian motion.
- : A scaling or regularization parameter.
- Total Error: A numerical measure of the discrepancy between the true and averaged solutions.
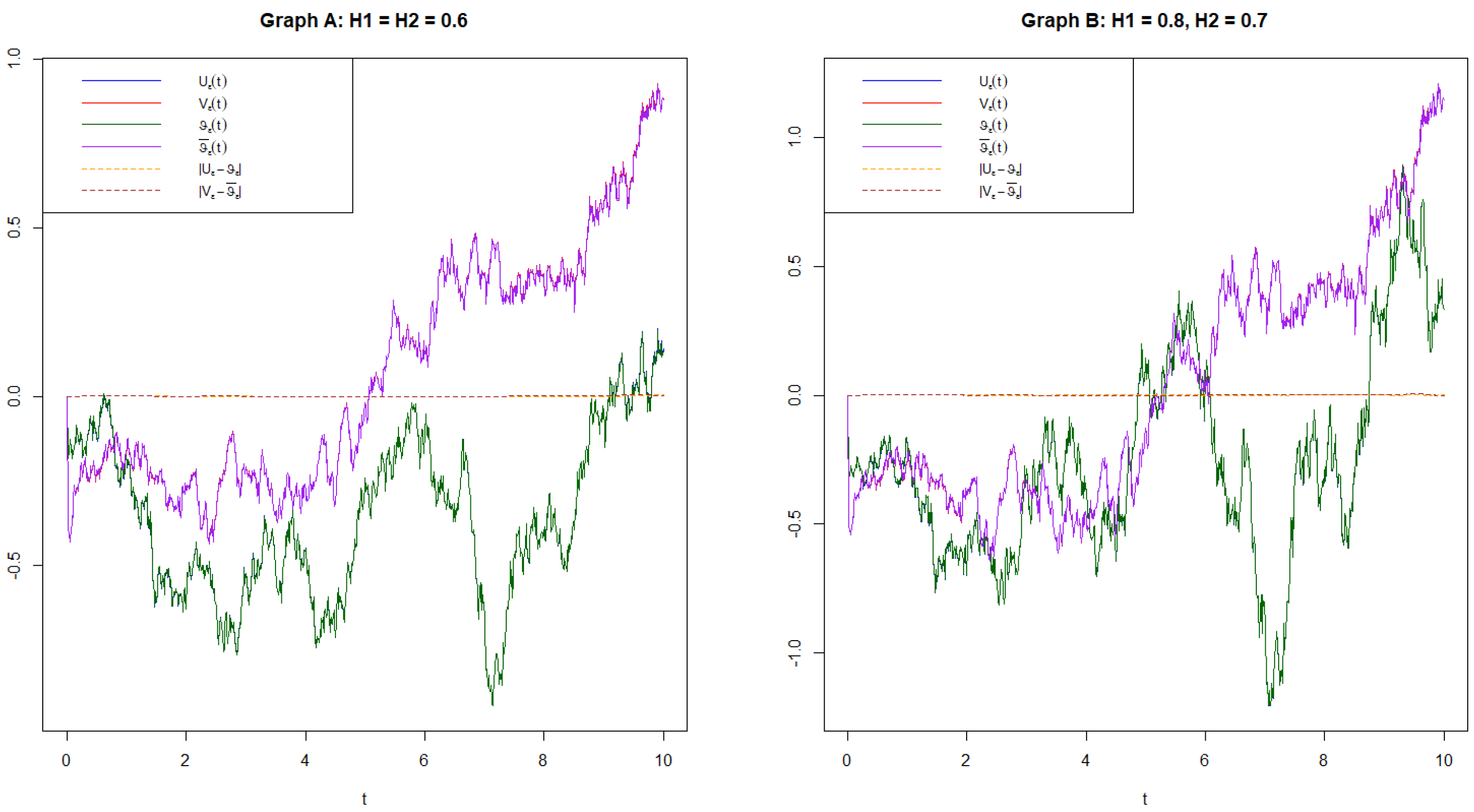
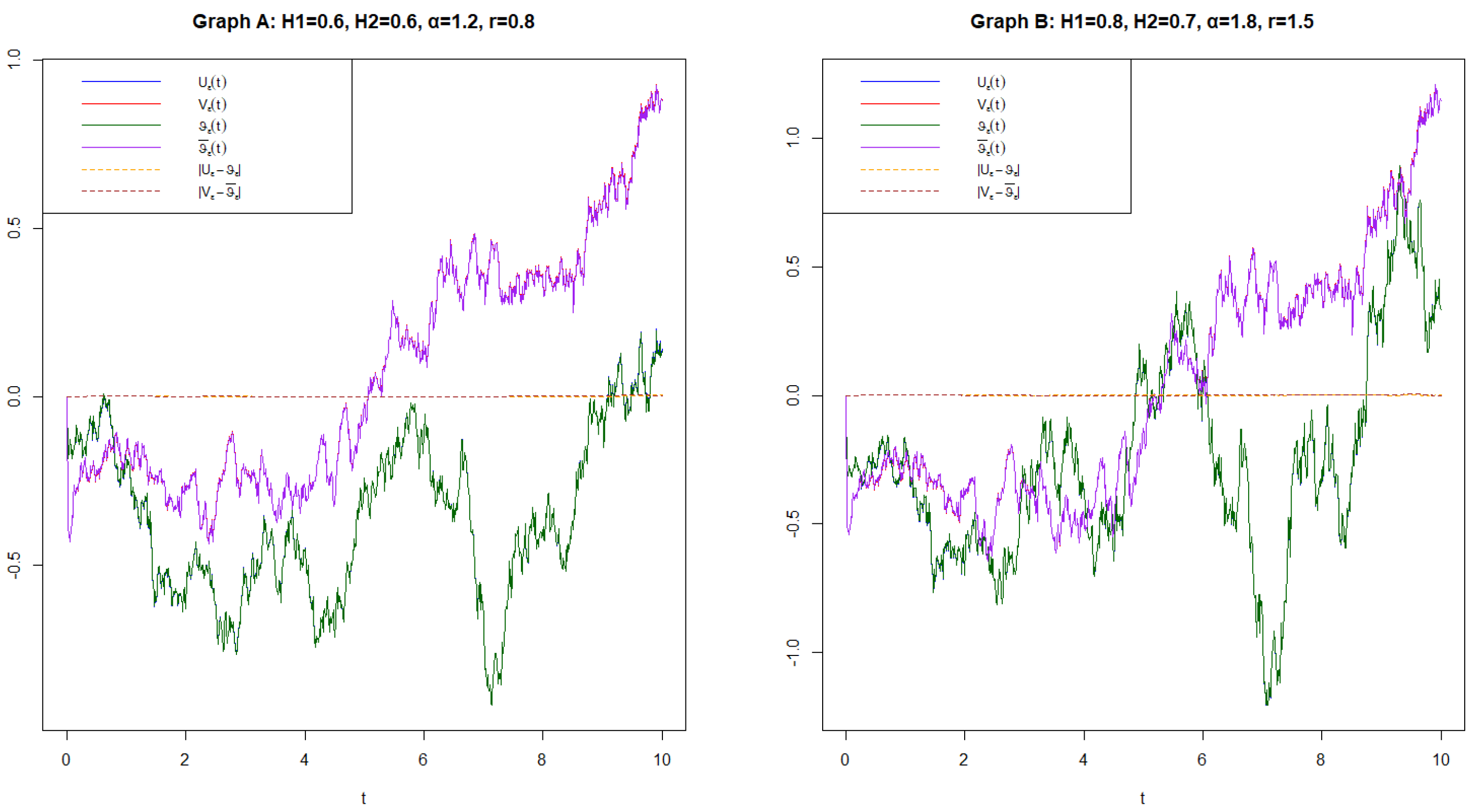
4.2. Example 2
5. Conclusions
- (A)
- Lévy processes are discontinuous and Markovian.
- (B)
- FBm is continuous but non-Markovian and not a semimartingale when .
- (C)
- There is a shortage of rigorous frameworks and solution theories for SDEs that simultaneously handle non-Markovian memory and jumps.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nualart, D.; Schoutens, W. Chaotic and predictable representation for Lévy processes. Stoch. Process. Their Appl. 2000, 90, 109–122. [Google Scholar] [CrossRef]
- Applebaum, D. Lévy Processes and Stochastic Calculus, 2nd ed.; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Bertoin, J. Lévy Processes; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Bogoliubov, N.N.; Krylov, N.M. La theorie generale de la mesure dans son application a l’etude de systemes dynamiques de la mecanique non-lineaire. Ann. Math. 1937, 38, 65–113. [Google Scholar]
- Kunita, H. Stochastic differential equations based on Lévy processes and stochastic flows of diffeomorphisms. In Real and Stochastic Analysis; Rao, M.M., Ed.; Birkhiuser: Boston, MA, USA, 2004; pp. 305–373. [Google Scholar]
- Zhu, W.Q. Nonlinear stochastic dynamics and control in Hamiltonian formulation. ASME Appl. Mech. Rev. 2006, 59, 230–248. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhu, W.Q. Stochastic Averageing of Quasi-Nonintegrable- Hamiltonian Systems Under Poisson White Noise Excitation. J. Apple. Mech.-Trans. ASME 2011, 78, 021002–021011. [Google Scholar] [CrossRef]
- Stoyanov, I.M.; Bainov, D.D. The averaging method for a class of stochastic differential equations. Ukr. Math. J. 1974, 26, 186–194. [Google Scholar] [CrossRef]
- Xu, Y.; Pei, B.; Li, Y. Approximation properties for solutions to non-Lipschitz stochastic differential equations with Levy noise. Math. Meth. Appl. Sci. 2015, 38, 2120–2131. [Google Scholar] [CrossRef]
- Liu, X.; Duan, J.; Liu, J.; Kloeden, P. Synchronization of dissipative dynamical systems driven by non-Gaussian Lévy noises. Int. J. Stoch. Anal. 2010, 2010, 502803. [Google Scholar] [CrossRef]
- Hu, Y.; Øksendal, B. Fractional white noise calculus and application to finance. Infin. Dimens. Anal. Quantum Probab. Relat. Topics 2003, 6, 1–32. [Google Scholar] [CrossRef]
- Tudor, C.A. Analysis of Variations for Self-Similar Processes: A Stochastic Calculus Approach; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Xu, Y.; Guo, R.; Liu, D.; Zhang, H.; Duan, J. Stochastic averaging principle for dynamical systems with fractional Brownian motion. arXiv 2013, arXiv:1301.4788. [Google Scholar] [CrossRef]
- Ren, L.; Xiao, G. The Averaging Principle for Caputo Type Fractional Stochastic Differential Equations with Lévy Noise. Fractal Fract. 2024, 8, 595. [Google Scholar] [CrossRef]
- Xu, W.; Duan, J.; Xu, W. An averaging principle for fractional stochastic differential equations with Lévy noise. Chaos 2020, 30, 083126. [Google Scholar] [CrossRef] [PubMed]
- Ikeda, N.; Watanabe, S. Stochastic Differential Equations and Diffusion Processes; North Holland Publishing Company: Amsterdam, The Netherlands; Oxford, UK; New York, NY, USA, 1989. [Google Scholar]
- Blouhi, T.; Ferhat, M. Coupled System of Second-Order Stochastic Differential Inclusions Driven by Levy Noise. Mem. Differ. Equ. Math. Phys. 2024, f91, 21–38. [Google Scholar]
- Ferha, M.; Blouhi, T. Topological method for coupled systems of impulsive neutral functional differential inclusions driven by a fractional Brownian motion and Wiener process. Filomat 2024, 38, 6193–6217. [Google Scholar] [CrossRef]
- Alos, E.; Nualart, D. Stochastic calculus with respect to the fractional Brownian motion. Ann. Probab. 2001, 29, 766–801. [Google Scholar] [CrossRef]
- Bihari, I. A generalisation of a lemma of Bellman and its application to uniqueness problems of differential equations. Acta Math. Acad. Sci. Hungar. 1956, 7, 81–94. [Google Scholar] [CrossRef]
- Biagini, F.; Hu, Y.; Øksendal, B.; Zhang, T. Stochastic Calculus for Fractional Brownian Motion and Applications; Springer: London, UK, 2008. [Google Scholar]
- Taniguchi, T. The existence and asymptotic behaviour of solutions to non-Lipschitz stochastic functional evolution equations driven by Poisson jumps. Stochastics 2010, 82, 339–363. [Google Scholar] [CrossRef]
- Xu, Y.; Duan, J.; Xu, W. An averaging principle for stochastic dynamical systems with Levy noise. Phys. D Nonlinear Phenom. 2011, 240, 1395–1401. [Google Scholar] [CrossRef]
- Wang, L.; Cheng, T.; Zhang, Q. Successive approximation to solutions of stochastic differential equations with jumps in local non-Lipschitz conditions. Appl. Math. Comp. 2013, 225, 142–150. [Google Scholar] [CrossRef]
- Klebaner, F.C. Introduction to Stochastic Calculus with Applications, 2nd ed.; Imperial College Press: London, UK, 2005. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Error | |||
|---|---|---|---|
| 0.6 | 0.6 | 1.0 | 0.0231 |
| 0.7 | 0.6 | 0.5 | 0.0258 |
| 0.6 | 0.7 | 1.5 | 0.0283 |
| 0.7 | 0.7 | 1.0 | 0.0302 |
| 0.8 | 0.6 | 1.0 | 0.0320 |
| r | Error_U | Error_V | ||||
|---|---|---|---|---|---|---|
| 0.8 | 0.6 | 1.8 | 0.5 | 3 | 0.0008456 | 0.0007523 |
| 0.7 | 0.6 | 1.8 | 0.5 | 3 | 0.0009262 | 0.0006721 |
| 0.7 | 0.6 | 1.5 | 0.5 | 3 | 0.0009491 | 0.0006868 |
| 0.8 | 0.6 | 1.5 | 0.5 | 3 | 0.0008642 | 0.0007743 |
| 0.6 | 0.6 | 1.8 | 0.5 | 3 | 0.0010092 | 0.0006508 |
| 0.6 | 0.6 | 1.2 | 1.0 | 3 | 0.0009149 | 0.0007603 |
| 0.6 | 0.6 | 1.2 | 1.5 | 3 | 0.0009149 | 0.0007603 |
| 0.6 | 0.6 | 1.5 | 1.0 | 3 | 0.0009149 | 0.0007603 |
| 0.6 | 0.6 | 1.5 | 1.5 | 3 | 0.0009149 | 0.0007603 |
| 0.6 | 0.6 | 1.8 | 1.0 | 3 | 0.0009149 | 0.0007603 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blouhi, T.; Albala, H.; Ladrani, F.Z.; Cherif, A.B.; Moumen, A.; Zennir, K.; Bouhali, K. Averaged Systems of Stochastic Differential Equations with Lévy Noise and Fractional Brownian Motion. Fractal Fract. 2025, 9, 419. https://doi.org/10.3390/fractalfract9070419
Blouhi T, Albala H, Ladrani FZ, Cherif AB, Moumen A, Zennir K, Bouhali K. Averaged Systems of Stochastic Differential Equations with Lévy Noise and Fractional Brownian Motion. Fractal and Fractional. 2025; 9(7):419. https://doi.org/10.3390/fractalfract9070419
Chicago/Turabian StyleBlouhi, Tayeb, Hussien Albala, Fatima Zohra Ladrani, Amin Benaissa Cherif, Abdelkader Moumen, Khaled Zennir, and Keltoum Bouhali. 2025. "Averaged Systems of Stochastic Differential Equations with Lévy Noise and Fractional Brownian Motion" Fractal and Fractional 9, no. 7: 419. https://doi.org/10.3390/fractalfract9070419
APA StyleBlouhi, T., Albala, H., Ladrani, F. Z., Cherif, A. B., Moumen, A., Zennir, K., & Bouhali, K. (2025). Averaged Systems of Stochastic Differential Equations with Lévy Noise and Fractional Brownian Motion. Fractal and Fractional, 9(7), 419. https://doi.org/10.3390/fractalfract9070419