1. Introduction
Fractional calculus has become an essential mathematical tool for modeling complex physical phenomena characterized by non-local and anomalous behaviors [
1]. Its widespread applicability extends across various disciplines, including anomalous diffusion [
2], thermodynamic processes [
3], control systems, and bio-fluid dynamics. Over the past decade, substantial progress has been made in the numerical treatment of fractional-order models, particularly through Finite Element Methods (FEMs) [
4]. These techniques offer significant advantages over traditional finite difference approaches, ensuring improved accuracy and flexibility in handling complex boundary conditions [
5].
Among the most notable contributions, Acosta and Borthagaray [
6] provided a rigorous analysis of the convergence properties of FEM discretizations and established fundamental regularity results for solutions to fractional Poisson equations. These theoretical developments were further validated through comprehensive computational experiments [
7]. Similarly, Ervin and Roop [
8] extended FEM applications to fractional advection–dispersion equations, demonstrating their effectiveness in capturing anomalous transport mechanisms present in diverse physical and engineering systems. The equation considered is as follows.
where
D represents the standard first-order spatial derivative, while
and
denote the left and right fractional integral operators, respectively, constrained by
and
with
.
Further advancements include solutions to fractional diffusion-wave models via FEM [
9], as well as the Petrov–Galerkin FEM approach for fractional convection–diffusion problems in heterogeneous media, formulated as follows:
where
and
denote the Caputo fractional derivative of order
[
10]. A detailed survey of numerical methodologies for fractional-order models can be found in [
11], encompassing various approaches and their practical implementations.
Time-fractional dissipative wave equations have played a crucial role in modeling the physical phenomena of complex systems. The reason has been the simulation of the propagation/dissipation in such media with memory, where the dynamics exhibit certain non-standard diffusion characteristics [
9]. The earliest analyses of such model problems considered dissipation with order
[
12]. In [
13], the authors employed the
approach along with the backward Euler convolution quadrature, also referred to as the Grünwald-Letnikov approximation, to study the nonlinear time-fractional diffusion problems. Furthermore, ref. [
14] applied the
method on a graded mesh for time discretization in order to achieve optimal convergence rates using the
-Galerkin finite element method for nonlinear sub-diffusion problems. A fractional Crank–Nicolson–Galerkin finite element methodology for such model equations has recently been explored in [
15].
Symbolic computation plays a crucial role in deriving exact and approximate solutions for nonlinear wave equations, enabling deeper insights into wave propagation and dissipative effects [
16]. These techniques are used to validate theoretical findings and ensure consistency in the formulation of the time-fractional dissipative wave equations. Symbolic computation facilitates the precise manipulation of mathematical expressions, aiding in the derivation of closed-form solutions and the stability analysis [
17,
18].
Nonlinearity also plays a pivotal role in wave equations, influencing wave propagation, stability, and dissipation mechanisms. Recent studies have demonstrated that nonlinear effects can substantially influence wave behavior, leading to complex interactions in various physical systems. For instance, ref. [
16] presents advanced nonlinear wave propagation mechanisms, contributing a refined mathematical framework for analyzing wave interactions in complex media. Gao explores in [
17] bilinear Auto-Bäcklund transformations and similarity reductions in shallow water wave equations, offering insights into nonlinear wave behavior in oceanic fluid dynamics. Furthermore, ref. [
18] highlights and examines a (2+1)-dimensional generalized modified dispersive water-wave system for the nonlinear and dispersive long gravity waves in shallow water of uniform depth. These contributions collectively enhance our understanding of nonlinear wave dynamics, paving the way for further advancements in computational and theoretical wave analysis. However, a notable limitation of these studies is that they do not account for time-fractional dissipation in wave equations. Additionally, we present a novel numerical technique that utilizes the arbitrary polygonal discretization of the spatial domain together with the finite elements for temporal discretization.
In this study, we deal with the following time-fractional dissipative wave equation in two-dimensional space, defined as follows:
where
is a bounded polygonal domain in
with boundary
,
g represents the source term, and
denotes the
th order (where
) Riemann–Liouville fractional derivative of
with respect to time.
We further introduce a generalized numerical approach known as the Virtual Element Method (VEM) [
19,
20]. While there have been few numerical investigations on the 2D wave equations with integer order dissipation, we extend VEM here to the model equation involving fractional order dissipation of the Riemann–Liouville type. The reason for employing VEM in the spatial domain is that it is more adaptable to mesh geometries and can handle polytopal elements [
21].
The primary objective of this work is to construct a fully discrete scheme using the Newmark predictor–corrector approach supplemented with Grünwald–Letnikov approximation for time integration and VEM for spatial discretization. Subsequently, a thorough theoretical study is conducted for the fully discrete VEM, supported by numerical illustrations provided in later sections. Some of the significant contributions of this study to the field of computational mathematics and numerical analysis are as follows.
A comprehensive space-time discretization framework is proposed for the analysis of a time-fractional dissipative wave equation. The approach integrates the VEM for spatial discretization and the Newmark predictor–corrector method for solving time integration, providing a robust framework for fractional wave equations.
The manuscript extends the capabilities of traditional FEM by employing the VEM, which supports polygonal and polyhedral mesh geometries. This generalization enables the handling of both convex and non-convex meshes, enhancing adaptability to complex domains.
A key contribution is the use of the Grünwald–Letnikov approximation in conjunction with the predictor–corrector scheme for the accurate discretization of the time-fractional dissipation term. This approach ensures a precise representation of memory effects in dissipative media.
This study rigorously establishes the existence and uniqueness of the discrete solution for the fully discrete solution, ensuring the soundness and reliability of the proposed method.
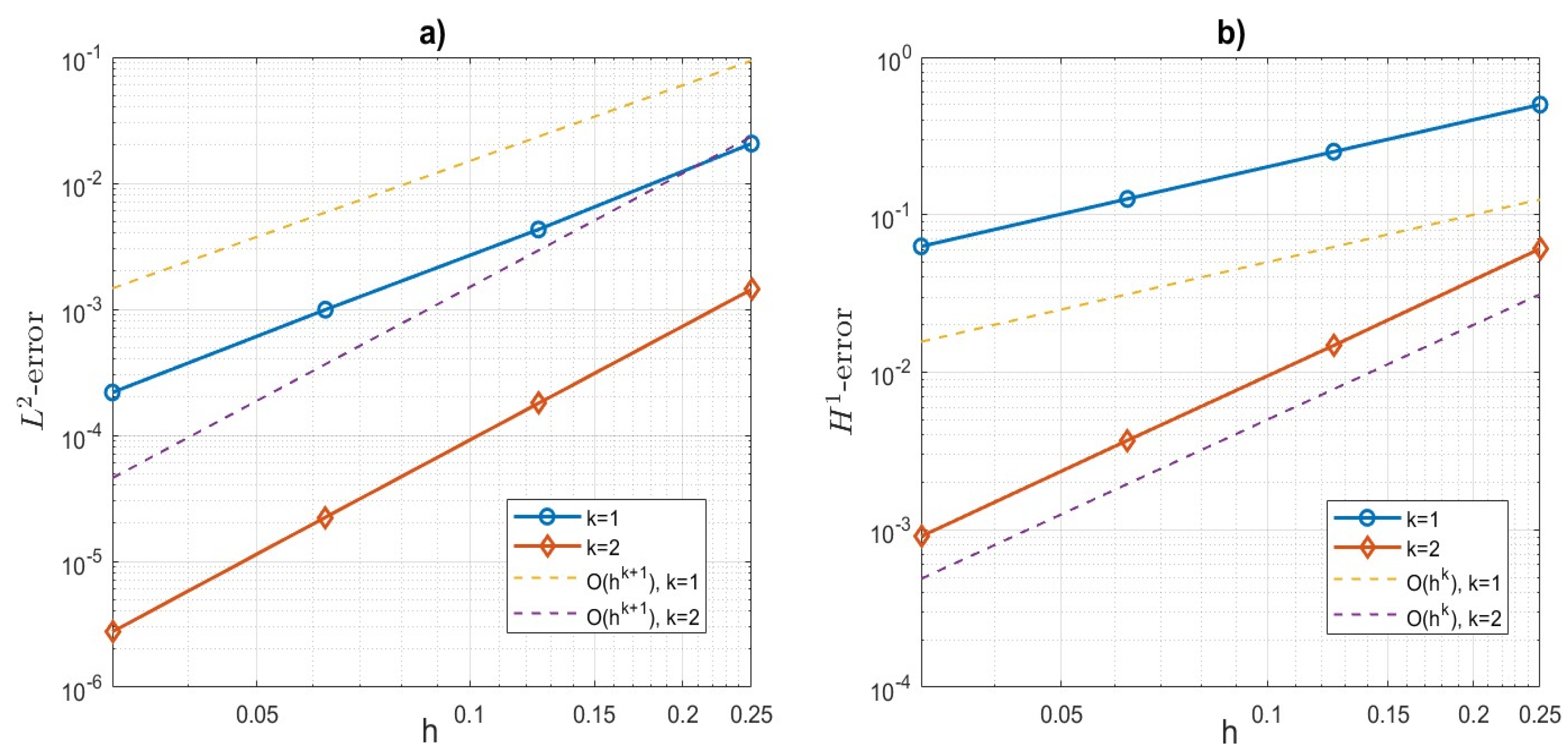
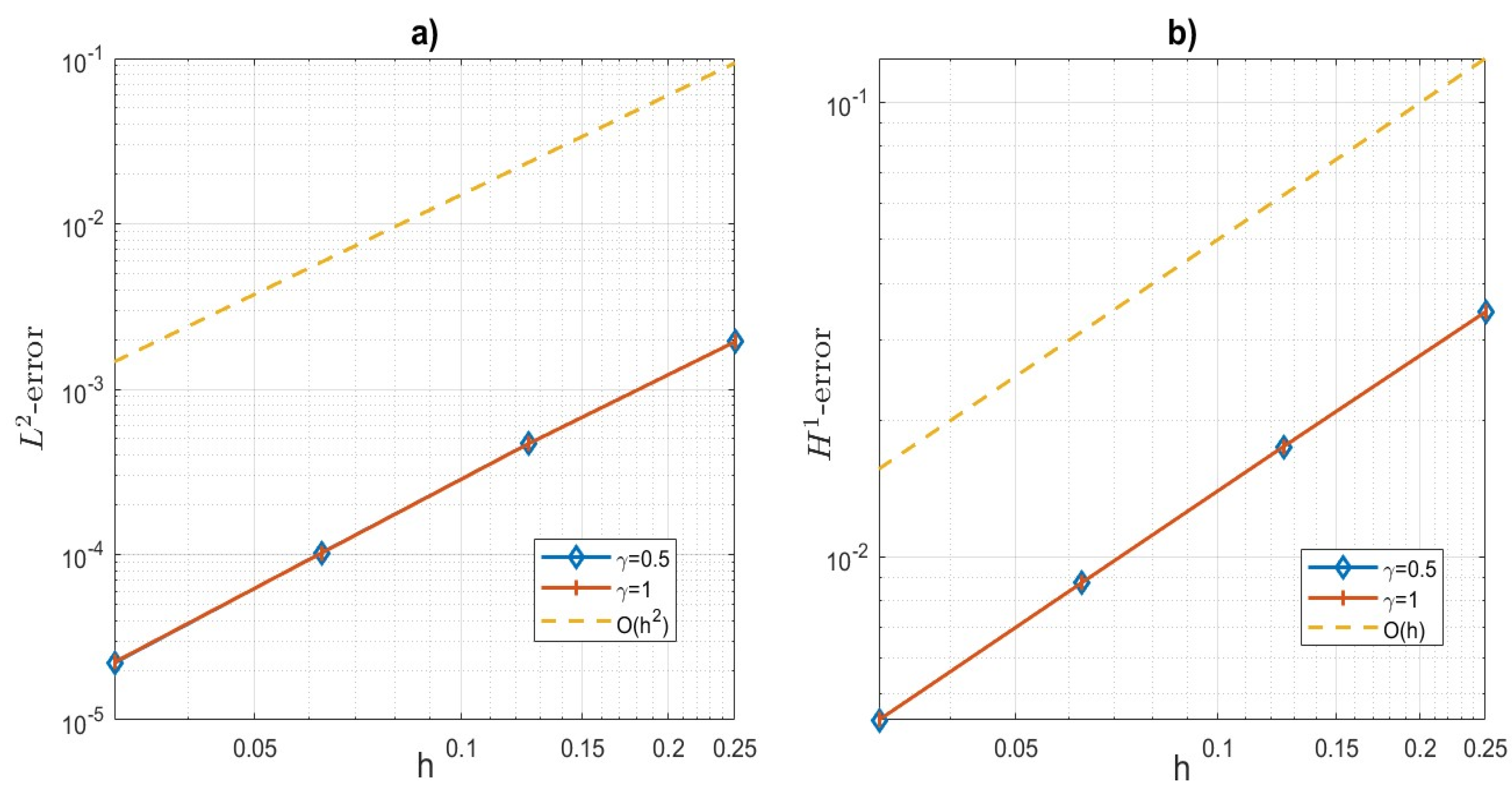
Optimal convergence rates are achieved and validated through a detailed error analysis in both the -seminorm and the -norm, confirming the method’s accuracy.
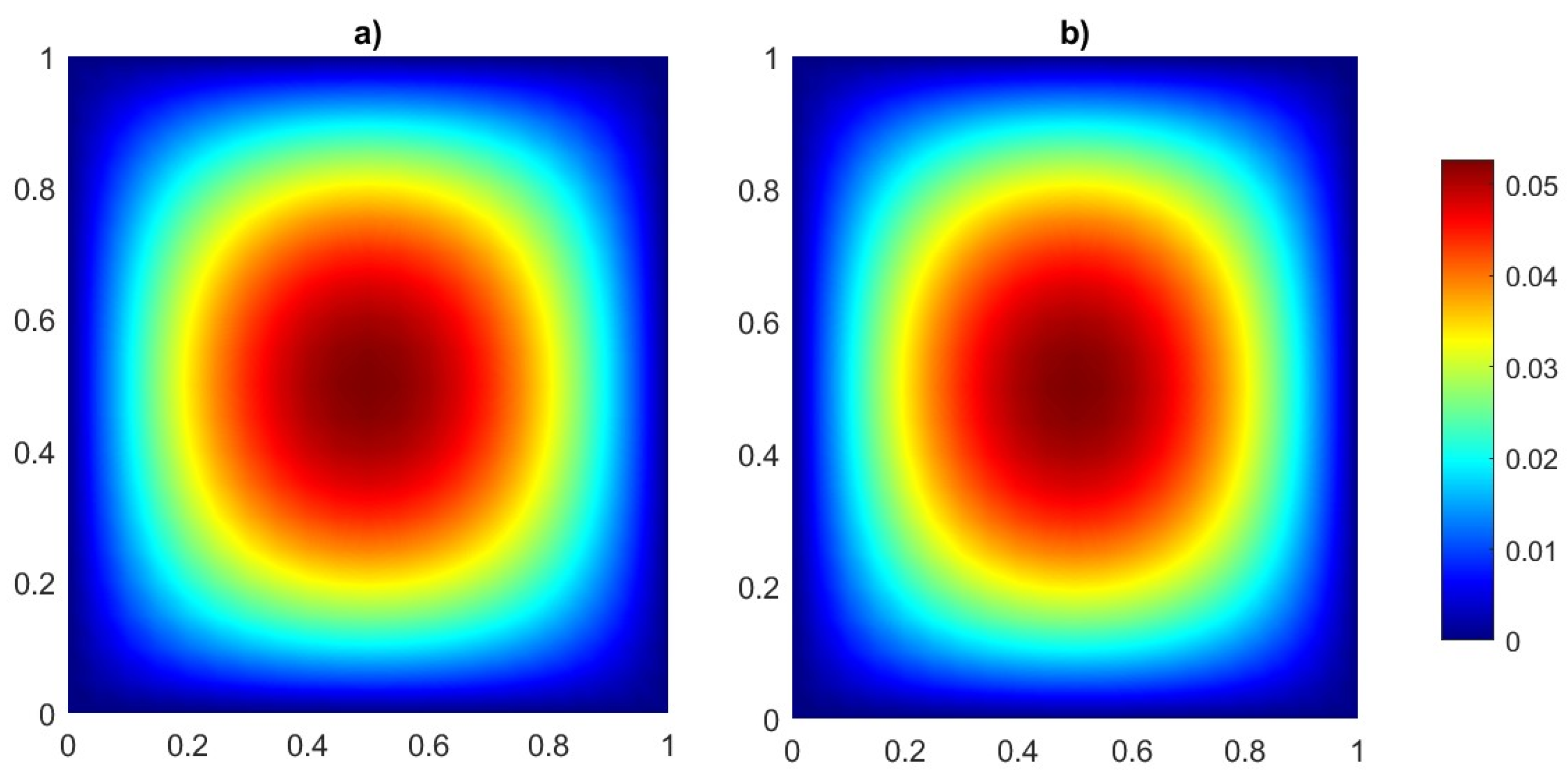
Extensive numerical experiments are performed on both convex and non-convex polygonal meshes. The results not only validate the theoretical findings but also demonstrate the efficacy of the VEM for arbitrary polygonal discretizations.
The proposed method provides a computationally efficient and flexible tool for modeling complex physical phenomena, particularly those involving wave propagation and dissipation in media with memory effects.
These contributions collectively advance the state of the art in numerical analysis of time-fractional equations and underscore the versatility and efficiency of the VEM. Our main focus is to lay the foundational mathematical framework of a general time-fractional dissipative wave model, with the construction of a fully discrete scheme, performing a comprehensive theoretical analysis, and validating the method numerically.
Future work will focus on the application of the proposed model to practical problems. Specifically, we aim to study phenomena modeled by generalized dissipative wave equations, with an immediate focus on the subject-specific modeling and mitigation of epileptic seizures.
Outline: The rest of the article is organized as follows. Some early definitions and notation, a mathematical framework of the problem, and important assumptions are described in
Section 2, and the continuous problem is presented in
Section 3. The main contribution of the study is found in
Section 4, in which the fully discrete VEM is derived, presenting a priori estimates, followed by an in-depth error analysis and implementation procedure.
Section 5 provides numerical examples that support these theoretical results. Finally,
Section 6 concludes the paper with a summary of key findings and future directions.
4. The Virtual Element Method
The VEM was first introduced for a fundamental Poisson problem in [
19], and a guide to the numerical implementation of the higher-order VEM has been addressed [
21]. The VEM has a solid mathematical basis, drawing inspiration from the mimetic finite difference method and having characteristics in common with FEM [
19]. Over time, VEM has attracted increasing attention in numerical analysis, particularly the problems involving complex domain geometry by facilitating discretization using arbitrary polygonal elements in 2D and polyhedral elements in 3D [
21]. The VEM framework has revealed that it serves as a generalization of the FEM over some polygonal and polyhedral meshes. A distinctive aspect of the finite-dimensional VEM space is the presence of non-polynomial functions, which are solutions to certain partial differential equations [
20]. These non-polynomial functions are not explicitly known, and therefore, the basis functions of the VEM space are not available in closed form [
20].
As is clarified in [
21], the explicit definition of the basis functions is not required for computing the mass and stiffness matrices. Instead, suitable polynomial projection operators are defined on the VEM space, and a set of Degrees of Freedom (DoFs) is chosen to ensure the evaluation of the linear and bilinear forms in the discrete scheme. Another key feature of the VEM is its inherent robustness to geometric distortion and its ability to tackle hanging nodes in the meshes. This flexibility makes the VEM a particularly attractive numerical technique to deal with problems involving complex static/evolving domain configurations, frequent mesh adaptations, and high-order solution approximation. Higher-order VEMs have recently received considerable attention. Recent advancements in VEM have demonstrated its applicability to various mathematical models. For instance, conforming and non-conforming VEM approaches have been utilized to solve fourth-order reaction–diffusion equations [
22]. Additionally, conservative VEM formulations, both conforming and non-conforming, have been applied to nonlinear Schrödinger models with trapped terms [
23]. Zhang et al. contributed significantly by introducing a locally stabilized projection-based VEM designed for higher Reynolds numbers in the context of fractional-order Burgers’ equations [
24]. The study is inspired by recent efforts in extending VEM to fractional-order partial differential equations, as explored in [
25,
26,
27,
28].
The primary objective of this work is to extend the VEM to a 2D wave equation involving a time-fractional dissipative term. Specifically, we construct a fully discrete VEM scheme using the Euler convolution quadrature supplemented with Grönwall inequality for the temporal direction and VEM for the spatial direction. Subsequently, a comprehensive theoretical study is conducted for the fully discrete VEM, supported with numerical illustrations provided in later sections.
4.1. VEM Discretization
Let
be a shape-regularized family of polygons of domain
, with
being the diameter of an element
. Also, let
For mesh regularity, we assume the following conditions hold for each element,
, with some fixed
:
E is a simply connected polygon with a finite number of straight edges;
E is star-shaped with respect to a ball of radius at least ;
the distance between any two of its vertices is at least .
Consider the function space
over element
E, defined in [
20] as
Moreover, define
as the elliptic projection operator, such that
and
, the standard
-projection onto
defined by
For each
, we define the locally “enhanced” virtual element space by utilizing the elliptic projection operator as
where two polynomials are considered equivalent if the degree of their difference does not exceed
. This equivalence plays a crucial role in defining the virtual element spaces. Specifically, the union of the spaces of homogeneous polynomials of exact degrees
k and
serves as a key component in the implementation. This structure ensures that the polynomial basis captures the necessary degrees of freedom and maintains consistency within the approximation framework. For polynomial equivalence classes, the quotient space is represented as
. By assembling the local VEM spaces, the global VEM space is produced and is given as
Any virtual element function in
is uniquely characterized by the following DoFs (see
Figure 1):
(D1): vertex values for , where are the vertices of E;
(D2): on each edge e of for , the values of at the internal Gauss-Lobatto quadrature points;
(D3): the polynomial moments for
These DoFs are assembled in an
-conforming manner to define the global VEM space of order
k. The unisolvence of these degrees of freedom has been established in [
20], ensuring that each virtual element function is uniquely determined by them. An essential characteristic of the local virtual element space is that the projections
and
can be computed directly from the DoFs (D1)–(D2) associated with
. These projections play a central role in constructing the discrete formulation and implementing the virtual element method efficiently.
The semi-discrete VEM approximation of the weak formulation (
2) can be stated as follows:
Find
for almost every
, such that
Here, the global discrete bilinear forms
and
are defined as follows:
where both
are locally computable, defined as follows:
where
and
are symmetric positive–definite stabilizing bilinear forms, satisfying
for some positive constants
independent of
h and
E.
The stability of
and
is guaranteed through these stabilization terms (a formal description is given below). This work adopts
“dofi-dofi” stabilization (see [
29]), which is an essential component of the VEM, to ensure numerical stability and consistency on general polygonal meshes. We provide explicit definitions of the stabilization terms
and
:
The stiffness stabilization term
is defined by
where
is the number of degrees of freedom for the element, and
is the value of
u at the
DoF.
The mass stabilization term
is defined by
where
is the diameter of the element
E.
The bilinear forms and possess key properties that ensure the robustness of the method, as stated in the following results.
Proposition 1 (Polynomial Consistency)
. Given , it holds that Proof. The polynomial consistency follows from the definition of locally computable discrete bilinear forms and the use of the fact that
is an identity operator on
. Since
, it follows that
So, using the definition of
, we have
which proves the polynomial consistency. The second part can be proved similarly. □
Proposition 2 (Stability)
. There exist two pairs of constants, and , both independent of h, with and , such that, for any , the following equivalences hold: Proof. Using the symmetry of bilinear forms and stabilization terms, we have
and
which proves the stability of
. Similarly, we can prove the stability of
. □
These conditions ensure that the non-polynomial parts and scale similarly to the polynomial parts of and , respectively.
4.2. A Fully Discrete Scheme
The Grünwald-Letnikov approximation and Caputo definition provide general approximations of fractional derivatives achieving consistency orders of 1 and 2, respectively. These methods enable the numerical evaluation of fractional derivatives by transforming them into finite-type sums involving only integer-order derivatives. To construct a fully-discrete scheme, it is necessary to discretize the fractional derivative in the temporal direction. For some
K, a positive integer, let
be the partition of the interval
with uniform step-length
. The Grünwald-Letnikov (GL) formula is used to approximate the Riemann-Liouville (RL) fractional derivative, which is defined as follows:
Using the GL scheme, the discrete approximation of the RL derivative at
is given by
where
is the uniform time step size,
represents the numerical solution at the time step,
are the Grünwald weights computed as follows:
The weighted summation over past values (
) effectively captures the memory effects inherent in fractional dynamics. In [
30], the authors present a fully discrete numerical scheme for solving strongly nonlinear time-fractional parabolic problems using the Grünwald–Letnikov method for time discretization and a second-order central difference scheme for spatial discretization. This work establishes sharp error bounds using a Grönwall-type inequality and complementary discrete kernels, ensuring the stability and accuracy of the numerical method wherein well-posedness results are rigorously established, providing confidence in the correctness of the scheme. The results indicate that the proposed scheme achieves first-order temporal convergence away from the initial time, and fractional-order convergence near the initial time. The findings are particularly relevant for modeling complex wave propagation and diffusion processes. We rely on this work to establish the usefulness of the Grünwald–Letnikov approximation for the dissipative term in our model.
Remark 1. To achieve second-order accuracy, Jin et al. [15] utilized the following approximation to R-L type derivative at point :where is a discrete fractional differential operator. This second-order accuracy result was originally observed by Dimitrov [31], under suitable compatibility conditions and assuming the solution . We now construct the approximation in the temporal domain by using the Newmark predictor–corrector method [
32] in conjunction with Grünwald–Letnikov approximation (
3) for the time-fractional dissipative term. The resultant scheme will be a fully discrete scheme of the model problem (
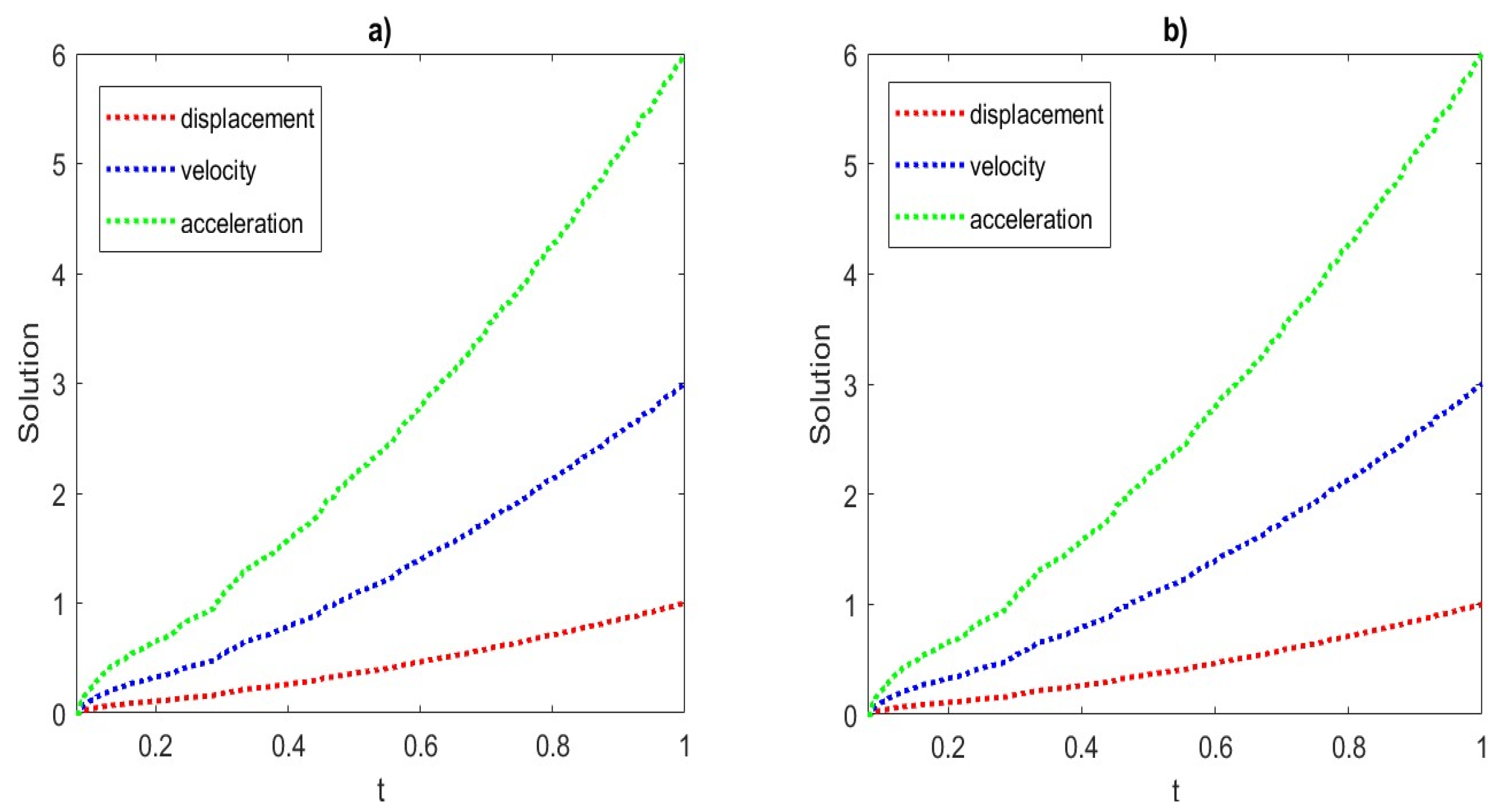
1). Before presenting the fully discrete scheme, we briefly summarize the Newmark approach. Let
and
be two Newmark parameters. From the model Equation (
1), we assume
and
as initial displacement and velocity respectively, with
representing the acceleration. Assuming
to be the initial acceleration, the predictor step yields the following approximations:
Solving for the acceleration
,
find , , such that
Using the corrector step, the updated displacement and velocity are given as follows:
We recall some important well-known facts associated with Newmark method:
Now, using the definition of operator
from the Equation (
3), together with the Newmark predictor–corrector method, we obtain the fully discrete scheme:
This discrete formulation results in a system of algebraic equations that can be solved to obtain the virtual element approximation.
4.3. Well-Posedness
To establish the existence and uniqueness of solutions for the fully discrete VEM, we rely on a key proposition based on Brouwer’s fixed point theorem is employed [
33], stated as follows.
Proposition 3. Let be a finite-dimensional Hilbert space equipped with norm and inner product . Suppose is a continuous mapping satisfyingThen, there exists an element, , such that Theorem 1 (Wellposedness)
. Let be the numerical solutions obtained by solving Equation (4). Then, for any time step , the discrete scheme (4) admits a unique solution Proof. Rewriting Equation (
4) as
and multiplying Equation (5) by
, we get the equivalent form
Now, we define the operator
, such that
Since
S is continuous, we choose
, and obtain
Using the projection operator
, the bilinear form
is defined as follows:
where
is a stabilization term ensuring that
is coercive, that is,
where
is a coercivity constant and is independent of the mesh size
h. The equivalence of this inequality in
can be derived using the Poincarè inequality, which relates the
-seminorm to the
-norm:
where
is the Poincarè constant dependent on the domain
. Additionally, the mass bilinear form satisfies
with
.
From Hypothesis 1, we have the boundedness of the source term
g, which satisfies
Using the Cauchy–Schwarz inequality in the Equation (
8), together with inequality (
9) and the assumption that
, we have
Since
, Equation (
10) can be rewritten as
Thus
, provided that
By choosing
, there exists
, such that
which, in turn, implies that
. Thus, for
, we have
With support of Proposition 3, the existence of a solution,
, is guaranteed.
To prove the uniqueness, let us assume that
and
are two solutions of Equation (
4). Denoting
and
for simplicity, from Equation (
6), we have
Setting
in the Equation (
11), we obtain
Now, from Hypothesis 1, which asserts boundedness and coercivity of the bilinear forms
and
, we arrive at the inequality
where
is a constant dependent on the source term,
. For simplicity, the factor
reflects a scaling parameter associated with the time-step size
raised to the power
.
Choosing
, we arrive at
Thus,
, confirming that
. Therefore, the discrete solution
is unique. □
4.4. A Priori Error Estimates
From the theoretical results established in this subsection, some important aspects of the VEM and the fully discrete scheme (
4) are achieved. These contributions are summarized as follows:
The effectiveness of constructing a fully discrete scheme by combining the VEM with a Newmark predictor–corrector approach in conjunction with the Grünwald–Letnikov approximation, without compromising robustness.
The capacity of the VEM to handle load/force terms that depend on both spatial and temporal domains, including scenarios where such terms are embedded within discretizations of both domains.
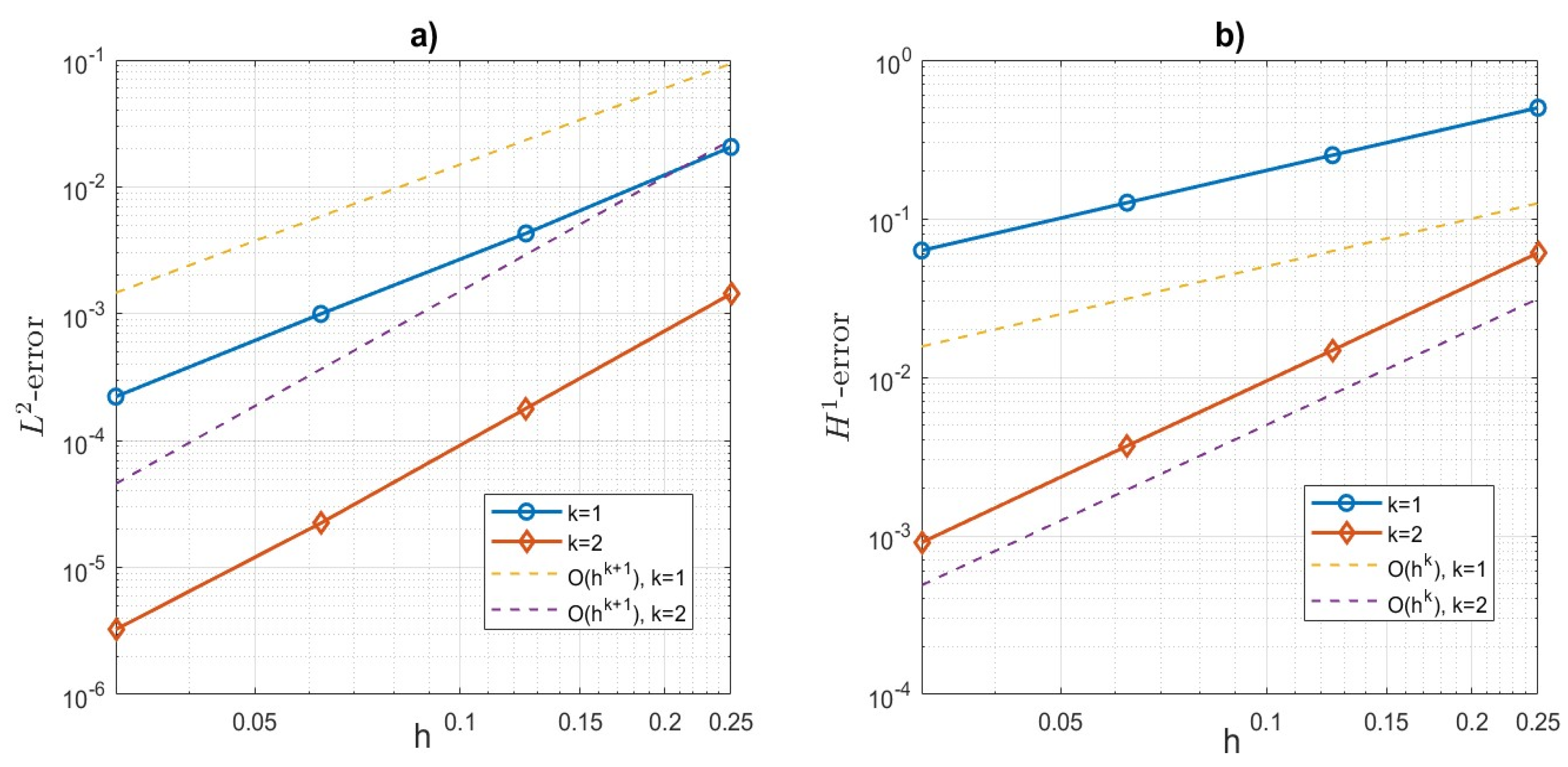
The optimal convergence achieved when dealing with a 2D wave equation involving a time-fractional dissipation term, as encountered in non-ideal dissipative wave models.
The confirmation, through both theoretical analysis and numerical experiments on various mesh configurations (including non-convex meshes), that the fully discrete scheme achieves optimal convergence order.
To demonstrate the convergence properties of the VEM, an appropriate set of a priori error bounds is established. These bounds rely on specific technical lemmas that play a crucial role in the forthcoming analysis. Details and proofs of these lemmas can be found in [
34].
Lemma 1. Let be non-negative sequences, and let two constants. Ifthen there exists a positive constant, , such that, for ,where is the Mittag–Leffler function [35] and . Lemma 2. Let be a sequence. Then, the following inequality holds: Now, the following theorem presents the a priori bound for the discrete VEM solution .
Theorem 2 (A priori bound for the discrete scheme)
. Let be the solution of the semi-discrete VEM. Then, there exists a positive constant, , such that, for , the solution satisfieswhere C is a positive constant independent of both h and τ. Proof. The virtual element solution
satisfies the variational formulation
Choosing
in Equation (
17), we obtain
Using the Cauchy–Schwarz inequality for the dual product on the right-hand side, we have
where
represents the boundedness of the source term
.
Substituting into Equation (
18), we obtain
Using the boundedness of
from Hypothesis 1, together with inequality (
19), we obtain
Next, applying the inequality
, we simplify Equation (
21)
Using Lemma 2 in Equation (
22), we obtain
Furthermore, Equation (
23) can be expanded using fractional terms as
Finally, using Lemma 1, we find a positive constant
, such that, for
and the theorem is proven. □
The last result in this section is about the convergence of the fully discrete VEM, which we prove in the next theorem by deriving an a priori error estimate.
Theorem 3 (
-norm Convergence of the Fully Discrete VEM)
. Consider as the solution to the continuous problem (1) and as the solution to the discrete VEM formulation (4) under Hypothesis 1. Then, there exists a positive constant, , such that, for , the following error estimate holds:where C is a positive constant that does not depend on either τ or h. Proof. Let
denote the projection operator, which satisfies the following identity:
As established in [
20], there exists a positive constant,
C, independent of
h, such that
By leveraging this projection operator
, the error between the analytical solution
and the discrete approximation can be reformulated. This step ensures that the error term is expressed in terms of the projection operator, allowing for further analysis of the convergence properties
with the obvious definition of
and
.
Assuming that
for any arbitrary
, we have an equality estimation for
as
Using Equation (
4) and definition of intermediate projection in Equation (
28), we have
From the weak form of Equation (
1), we have
and substituting into Equation (
30) yields
Using the Cauchy–Schwarz inequality and Hypothesis 1, setting
in Equation (
31), we obtain
Note that
Also, we have the inequality
and
Now, using Equations (
33)–(
35) in Equation (
32), we obtain
which gives
From the Equation (
37), we obtain
where
. Additionally, we write
Using the Lemma 1, there exists
, such that, for all
,
and thus,
Thus, the proof is complete by using the triangle inequality and definition of intermediate projection. □
Theorem 4 (
-seminorm convergence)
. If is the solution to Equation (1), and is the solution of the discrete scheme (4), then there exists , such that, for , it holds thatwhere C is a constant independent of τ and h. Proof. The proof follows along the same lines as that of Theorem 3 and is omitted for brevity. □
4.5. VEM Implementation
Let
be the dimension, and let
be the canonical basis for the global virtual element space
. Consider
with its associated DoF vector
, where
is the
DoF of
. Then, we have the expression
Substituting the expansion (
40) into the definition (
3) for operator
and taking
, in the discrete scheme (
4), we obtain the following system of linear equations for
:
Let us denote
M ,
A as the corresponding global matrix representation for the bilinear forms
and
, respectively. A load vector (column) at time step
n is denoted as
. Using these notations, the above system of equations can be compactly written as the following matrix equation:
Any effective iterative technique can be used to solve the above algebraic system. It is important to note that, in the discrete formulation, the numerical solution computation at
nth time step depends on the solutions that were computed at all preceding time steps, 1, 2,
…, and
. The following Algorithm 1 shows the steps of implementation to solve the matrix system (
41) for the resultant VEM solution. For details on assembling the global matrices, refer to [
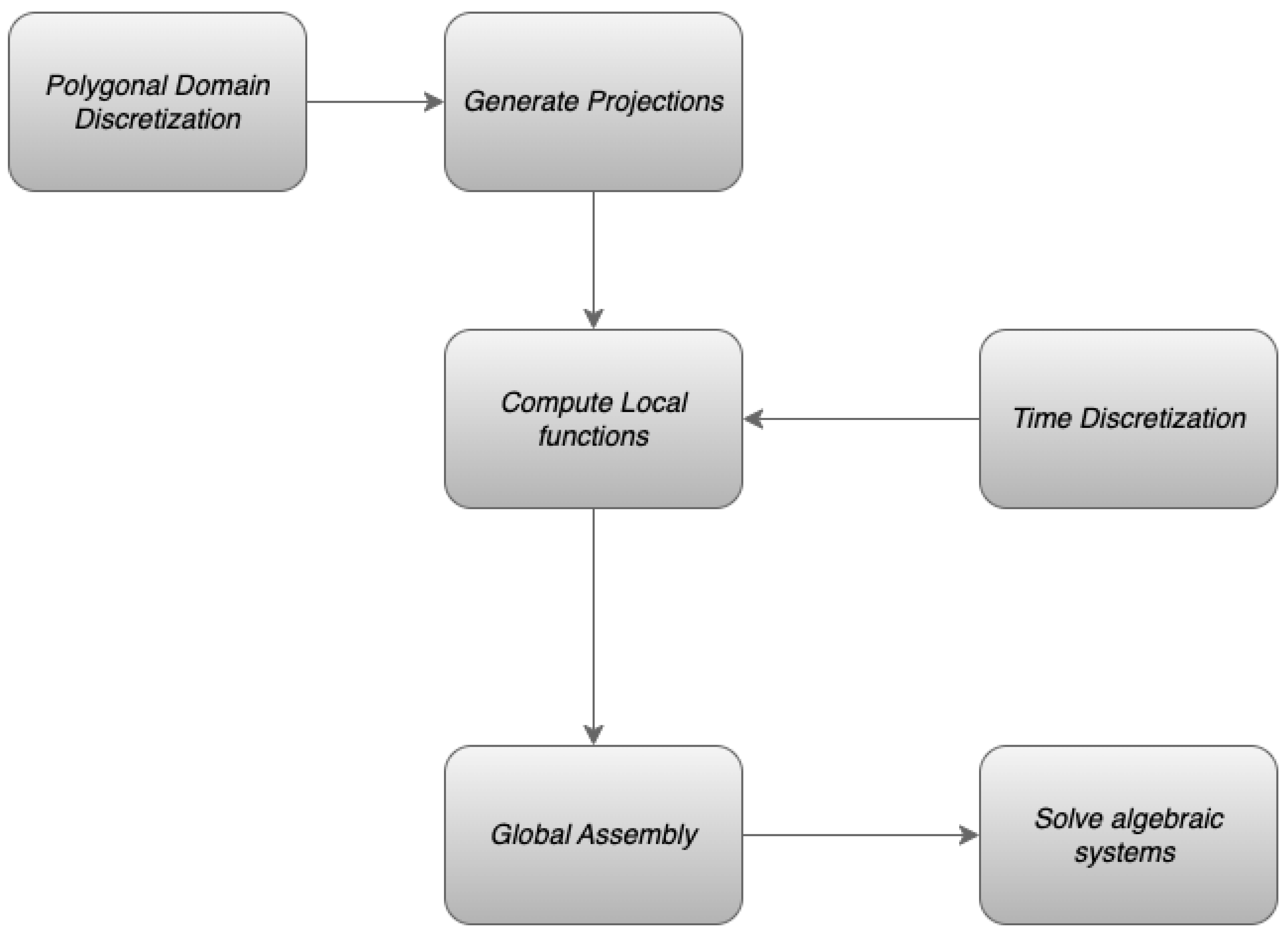
21]. The schematics in
Figure 2 show the implementation of the virtual element technique. Before proceeding to a detailed numerical analysis in the next section, we highlight key computational aspects of solving large-scale systems involving polygonal elements and fractional derivatives:
The flexibility of the VEM allows for the efficient discretization of complex geometries while ensuring numerical stability through projection-based matrix assembly. However, non-triangular elements introduce increased degrees of freedom, requiring optimized assembly techniques. We adopt the methodology outlined in [
21] for global assembly.
Fractional derivatives inherently introduce long-range memory dependence, meaning that past states influence the current solution, leading to computational and storage demands. To mitigate this, many studies discuss adaptive memory truncation techniques that reduce storage requirements while preserving numerical accuracy. Furthermore, the Grünwald–Letnikov approximation is used to enhance computational efficiency in systems governed by fractional-order dynamics.
Figure 2.
VEM implementation flowchart.
Figure 2.
VEM implementation flowchart.
| Algorithm 1: Virtual element method implementation |
![Fractalfract 09 00399 i001]() |










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}