1.1. Overview
Increasing pollution in the world is the price of urbanization. The massive population growth and the trend toward industrialization lead to a reduction in agricultural land and climate change. Every year, the number of city dwellers increases, and the use of transportation increases, contributing to higher carbon dioxide emissions. The world is moving toward a low-carbon economy, and communities need to address these challenges, which have become among the most critical issues for cities [
1]. Transportation accounts for nearly a quarter of atmospheric carbon emissions, primarily resulting from fuel combustion activities. Aviation alone accounts for 3% of this total, which is expected to increase as the aviation sector grows at an annual rate of 6% [
2].
Global plans have been developed to reduce environmental carbon emissions. Governments and relevant organizations have begun to adopt practical measures to address the ecological challenges of the aviation industry, focusing on decarbonizing aviation emissions using EAC [
3]. EAC represents a significant advance in aviation technology thanks to its many benefits. Its main advantage is the lower carbon emissions, which contribute to a greener environment and slow the pace of climate change. These aircraft are considered a sustainable alternative to traditional fuel-powered aircraft. In addition, flying in an electric aircraft is much quieter, which significantly reduces noise pollution in the air and at airports. This quieter operation can improve the quality of life for residents living near airports [
4].
Traditional solutions, such as increasing the capacity of the main electrical grid, can be considered to meet energy needs and achieve equilibrium between supply and demand in airport energy systems. However, these solutions require significant investments and face challenges related to the limited availability of land and resources. Furthermore, expanding energy generation, transmission, and distribution networks can lead to higher electricity costs for airports, increased transmission losses, and increased environmental pollution [
5].
To address these challenges, using renewable energy sources (RESs) and local microgrids in airports has been proposed as a solution that can provide clean and affordable electricity. This strategy not only helps in reducing the financial costs associated with electricity but also contributes to minimizing negative environmental impacts and promoting environmental sustainability. It is worth mentioning that local microgrids offer additional advantages, such as improving network resilience and increasing energy use efficiency [
6]. These microgrids can function autonomously or alongside the main grid, enhancing the airport’s ability to handle emergencies and provide continuous power at all times. Using RESs, such as wind turbines and solar energy, can be beneficial in providing clean energy and reducing pollution for independent airport systems. However, alongside their benefits, these sources also face challenges and difficulties [
7].
The further development of electric aircraft systems requires providing RESs and an independent AMG system, in addition to the ability to coordinate with other sources such as diesel generators, energy storage systems (ESSs), EVs, EACs, etc. [
8]. AMGs relying on RESs, like solar and wind, face several prominent challenges. These include variable energy production and low inertia, which lead to an imbalance between supply and demand, with frequency deviations affecting system stability [
9,
10]. To address these challenges, strategies such as LFC are implemented to ensure frequency stability, guarantee resiliency, and improve energy quality in AMGs [
11].
1.2. Literature Review
The loads in the power system are inherently unpredictable and uncertain, indirectly affecting the system’s frequency. This leads to unfavorable conditions due to the inherent variability of RESs. Consequently, this issue can be managed within the desired limits through the LFC mechanism by regulating generation power, energy storage devices, and/or flexible loads to minimize frequency deviation. This FR technique is achieved through the use of LFC. Frequency control has become a high priority for researchers who aim to enhance system stability and reliability, necessitating continuous advancements to ensure robust control and prevent blackouts. Various aspects and types of LFC have been engineered and validated in real-world power systems to monitor and stabilize these fluctuations. The LFC methods found in the literature can primarily be categorized based on different power system structures, the number of control loops, and the type of controller used in various configurations, such as single-area and multi-area interconnected power systems [
12,
13]. Furthermore, LFC methods are classified according to the number of integrated control loops, establishing different degrees of freedom (DOF) [
14].
Various control techniques have been employed to mitigate system frequency fluctuations, each offering unique advantages for different system requirements. Among these, intelligent control techniques have gained popularity, including fuzzy logic controllers [
15], artificial neural networks [
16], and adaptive neuro-fuzzy controllers [
17]. Additionally, robust control techniques, such as the H-infinity technique, sliding mode control, and
-synthesis [
18,
19], have been widely applied to ensure stability in uncertain environments. Optimal control methods like the linear quadratic Gaussian (LQG) [
20] and linear quadratic regulator (LQR) [
21] are also utilized to achieve optimal performance under specific system constraints. Furthermore, hybrid control techniques that combine sliding mode controllers (SMC) with type-2 fuzzy logic [
22,
23] offer increased robustness. Integer-order (IO) controllers, often integrated with other methods, remain essential to control systems. In contrast, the proportional-integral-derivative (PID) controller continues to dominate industrial control loops due to its simple design, cost-effectiveness, reliable performance, and user-friendliness [
24]. Lastly, fractional-order controller (FOC) methods, with various structures and combinations [
25], are emerging as a promising approach, which will be the focus of this article.
Researchers have been focused on developing optimal PID controllers using various optimization techniques to overcome challenges and enhance system reliability. Among the approaches employed to fine-tune PID parameters are the grasshopper optimization algorithm [
26], ant colony optimization technique [
27], Jaya algorithm [
28], and class topper optimization algorithm [
29]. Although PID controllers are widely used in numerous industrial applications, they face difficulties with system nonlinearities, uncertainties in modeled plants, and the precision of their parameters. In contrast, FOCs have emerged as a promising solution for power system stabilization due to their flexible configuration and higher degree of freedom. A notable member of the FOC family is the Tilt Integral Derivative (TID) controller, which has been recently applied to address the LFC problem due to its ability to fine-tune closed-loop system parameters, superior disturbance rejection, and improved reliability and robustness [
30,
31]. Another member of the FOC family is the fractional-order proportional-integral-derivative (FOPID) controller [
32].
The FOPID controller has been successfully applied in various electrical power systems [
33,
34]. Hybrid controllers that combine the features of FOPID and TID controllers offer researchers a wide range of opportunities for innovation and diversity in controller design, helping to address various challenges [
35]. Additionally, there has been increasing interest in cascaded controllers (CCs), which provide additional tuning possibilities and lead to enhanced performance compared to traditional single controllers. As a result, numerous studies have explored different CC configurations to tackle the LFC problem [
36]. Another approach involves designing controllers that combine two different types to leverage the advantages of both algorithms. The combination of model predictive control (MPC) and LQG controllers has been validated in [
37]. An adaptive MPC combined with a recursive polynomial model estimator has also been suggested in [
38]. Furthermore, the use of the integral-proportional-derivative (I-PD) controller and the integral-tilt-derivative (I-TD) controller has been explored in [
39,
40].
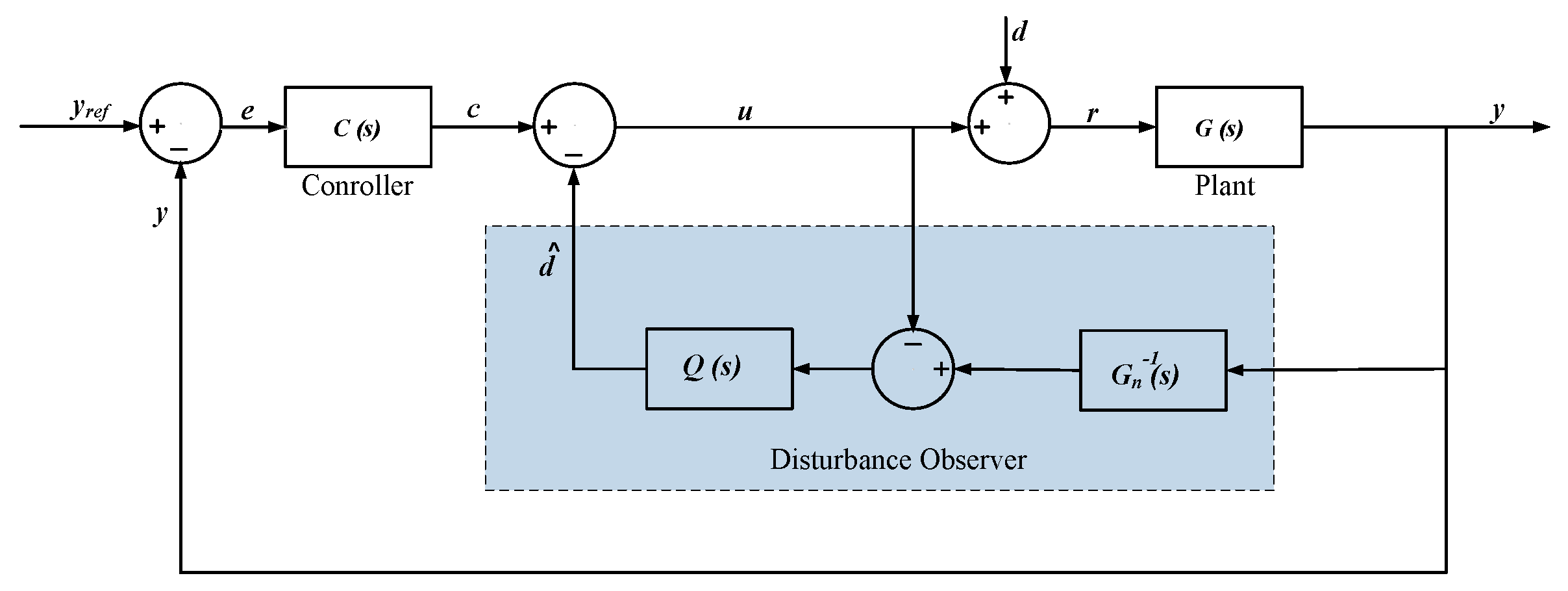
Building on the existing literature on LFC, several studies have introduced an auxiliary controller that estimates disturbances within the system, regardless of the primary controller in use. This supplementary controller can be integrated into any pre-existing control framework to boost its operational efficiency, and it is referred to as disturbance-observer-based control (DOBC) [
41,
42]. Numerous studies have demonstrated the application of DOBC for control in various fields, where it effectively mitigates the impact of external disturbances and ensures the desired control outcomes [
43,
44,
45]. To further optimize controller performance and reduce frequency deviations, this work proposes an enhanced DOBC implementation for frequency control in microgrids experiencing reduced system inertia due to high renewable penetration.
Little attention has been given to evaluating robust controllers tailored to AMGs. Key challenges for AMGs include managing fluctuating electrical loads due to aircraft movements and maintaining grid frequency stability amidst rising energy demands. The main advantages of AMGs include improved power quality, a reliable power source, increased flexibility, reduced feeder capacity, reduced transmission losses, increased penetration of RESs, and reduced pollution [
46]. The most challenging factors in the islanded AMG system are the RES-generated power uncertainty, low inertia, dynamic nature, and nonlinear structure. Each of these factors can create an imbalance of supply and demand in the power generation and consumption dynamics of the AMG system, leading to deviations in the frequency from their nominal values and instability and inversely affecting power quality and reliability. To address such challenges in the isolated AMG, the LFC strategy and controlling flexible loads mechanism can be employed [
8,
9,
10].
1.3. Paper Contribution
The LFC method is crucial in isolated AMGs, as it helps limit frequency deviations within predefined constraints by minimizing the gap between generated power and load demand [
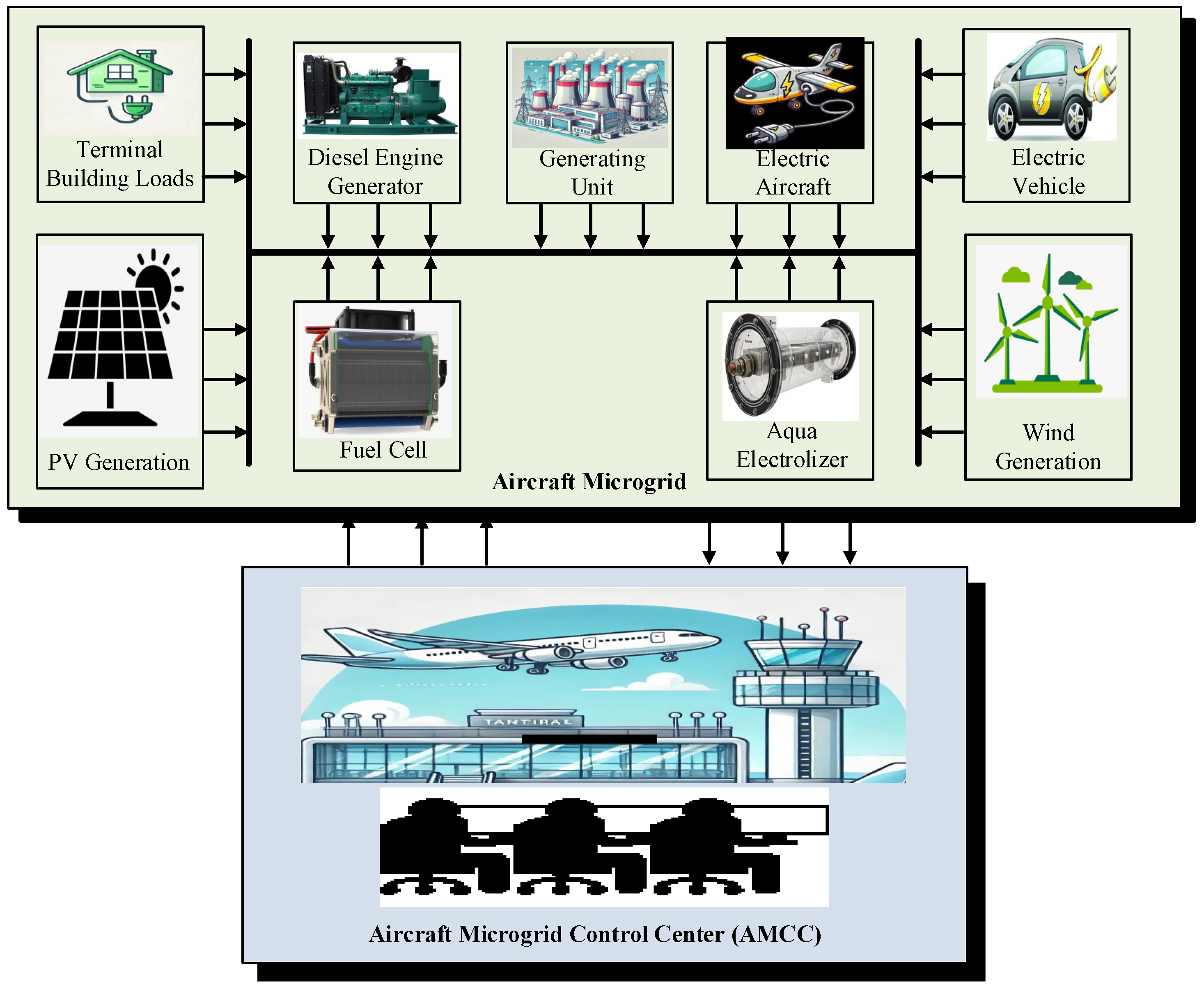
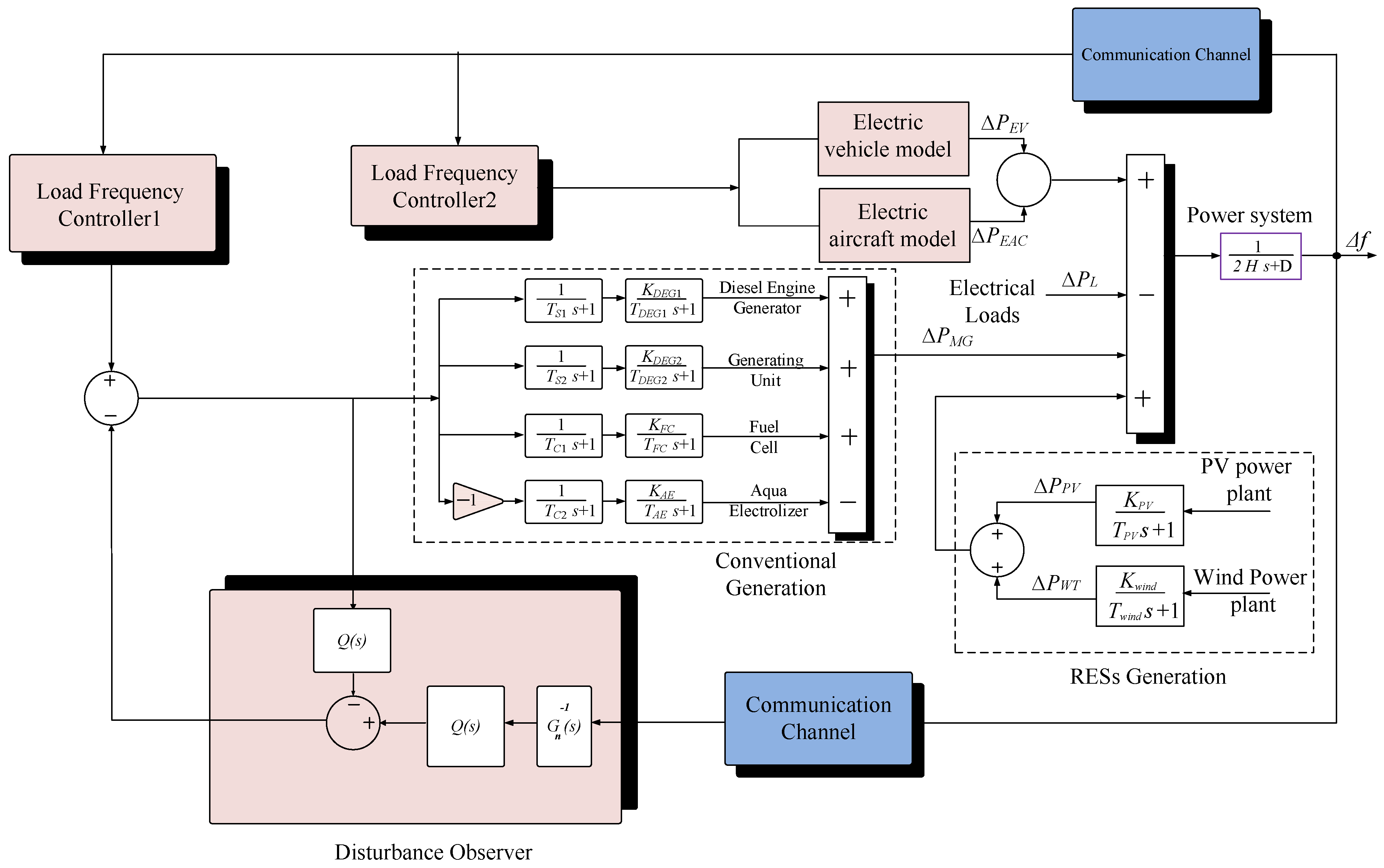
11]. To address this issue, this study introduces an isolated airport microgrid consisting of solar photovoltaic (PV), diesel engine generator (DEG), fuel cell (FC), and aqua electrolyzer (AE). The system also includes energy storage devices such as batteries and EAC, adding complexity to the control of the microgrid system. Therefore, precise coordination within the grid infrastructure is essential for meeting the unique energy storage and supply needs and for dependable frequency regulation in the islanded AMG system [
47]. This research advances a DOBC methodology to optimize the hybrid renewable-storage system’s dynamic performance.
The primary contributions of this study are summarized as follows:
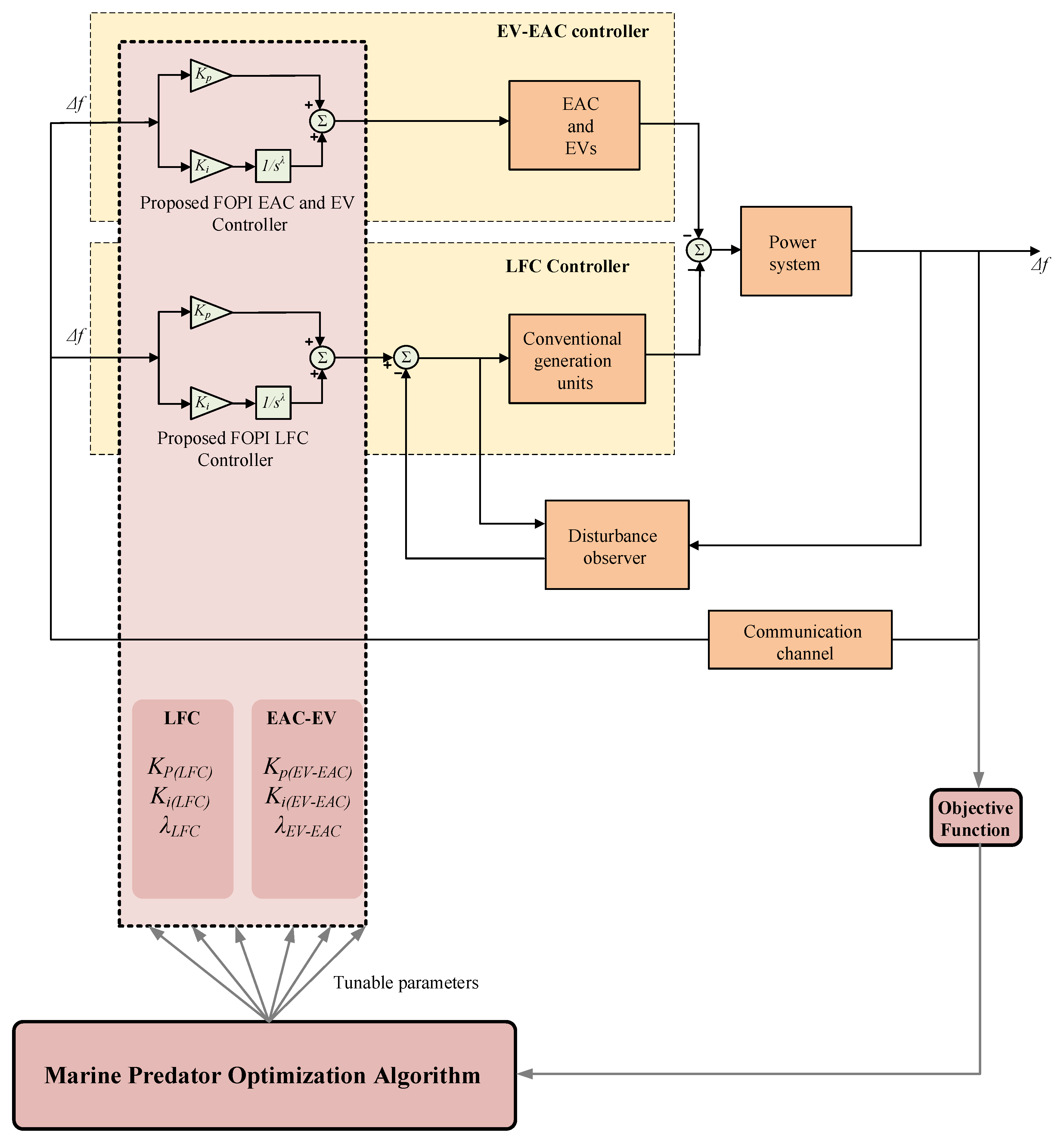
A hybrid controller using DOBC and FOC for frequency regulation in AMG systems is developed. The proposed DOBC injects a compensation signal into the control system, which represents the total disturbances from loads and renewables. Furthermore, the joint optimized FOC methods in LFC and in controlling EAC and EVs provide enhanced performance of the frequency regulation controller.
A resilient operation of the AMG system is proposed by regulating frequency and utilizing lithium-ion batteries from modern EAC and EV systems. The proposed optimized FOC enhances the contribution of available batteries in EACs and EVs to participate in frequency regulation.
Optimized design with robust disturbance rejection and fast response in AMG is proposed in this paper, which considers various severe operating scenarios in AMG systems. The proposed method provides an optimized FOC set of possible parameters for tuning, leading to guaranteed optimized performance.
The remainder of the paper is organized as follows:
Section 2 presents the components and modeling of AMG systems. The proposed controller is derived and detailed in
Section 3. The design methodology and optimization program are also provided in this section. The obtained results and discussions under different scenarios are given in
Section 4. The paper is concluded in
Section 5.




 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}