
Modification to an Auxiliary Function Method for Solving Space-Fractional Stochastic Regularized Long-Wave Equation


Abstract
1. Introduction
2. Preliminaries
- 1.
- ;
- 2.
- is a continuous function for ;
- 3.
- For and are independent;
- 4.
- For , is normally distributed with a mean of zero and a variance of .
3. Methodology
- Case A.
- If and , the polynomial has three real roots, one of which is a double root denoted by , and the other is a simple root whose value is . Thus, we obtain that . We consider two possible cases based on whether is a positive or a negative real number.(a) If , real solutions exist for g in . For , if we assume , then integrating (10) yieldswhile if we assume , the integration of (10) gives the solution(b) When , the real solution exists for . Assuming , integrating both sides of (10) gives
- Case B.
- Case C.
- If and , then the polynomial in (9) has three real roots, , , and , and it is assumed that . Thus, can be expressed as . We analyze the following two cases:(a) When is positive, real solutions exist if . For , and assuming , the integration of Equation (10) yieldswhere and indicates the Jacobi elliptic function [34].
- Case D.
- If , then the polynomial (9) has one real root , and two complex conjugate roots, and . Thus, can be written as . We consider the following possible cases:(b) When , the real solution exists if . Let , and the integration of (10) yields
Algorithm
| Algorithm 1 Procedure for solving the SPDE (4). |
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Interval of g for Real Solution | Solution | ||
|---|---|---|---|---|
| 1. | 0 | − | ||
| 2. | 0 | 0 | ||
| 3. | + | − | ||
| 4. | − | arbitrary |
| Case | Interval of g for Real Solution | Solution | ||
|---|---|---|---|---|
| 1. | 0 | − | ||
| 2. | 0 | 0 | ||
| 3. | + | − | ||
| 4. | − | arbitrary |
- (i)
- It results in real solutions for the given SFPDEs which are formulated by integrating the differential form (10) over certain intervals of real wave propagation.
- (ii)
- It gives the bounded solutions, which can be obtained by integrating the differential form (10) over bounded intervals.
- (iii)
- It enables us to construct all possible solutions. This results in the existence of different intervals of real solutions, all subject to the same conditions on the physical parameters. That is, we can derive different solutions from both mathematical and physical perspectives using the same constraints on the physical parameters. Thus, when and (i.e., the first case in Table 1), there are two intervals of real solutions, and both lead to completely different solutions. The first solution is bounded and physically meaningful, while the second is unbounded and has no physical interpretation. Thus, the use of intervals of real solutions is significant and cannot be ignored.
4. Application
- Case I:
- This case is characterized by which holds when . Thus, the solution (32) becomesDepending on sign of , some solutions can be found.(a) If , which holds when , the relevant case is Case 1 in Table 1. For , the solution to the reduced Equation (28) is as follows:Consequently, the obtained solution is new and has the formIf , the reduced Equation (28) has the solutionThus, a new solution is obtained in the form(b) Suppose , which holds when and it is Case 1 in Table 2. If , then the reduced Equation (28) has a solution of the formHence, Equation (1) has a solution in the form
- Case II:
- Assume , which holds if . The solutions are classified based on the sign of as follows:(a) If , which satisfies when and it is Case 3 in Table 1. If , the solution of the reduced Equation (28) has the formHence, the obtained solution to Equation (1) is new and has the formIf , the solution of the reduced Equation (28) becomesAs a result, the solution to Equation (1) is expressed in the form(b) If , which verifies when , corresponding to Case 3 in Table 2. If , then the solution to the reduced equation isTherefore, the solution to Equation (1) has the formThe solution (49) represents a new solution to Equation (1). If , then the reduced Equation (28) has a solution of the formHence, the solution to Equation (1) becomes
5. Graphical Representation
- (a)
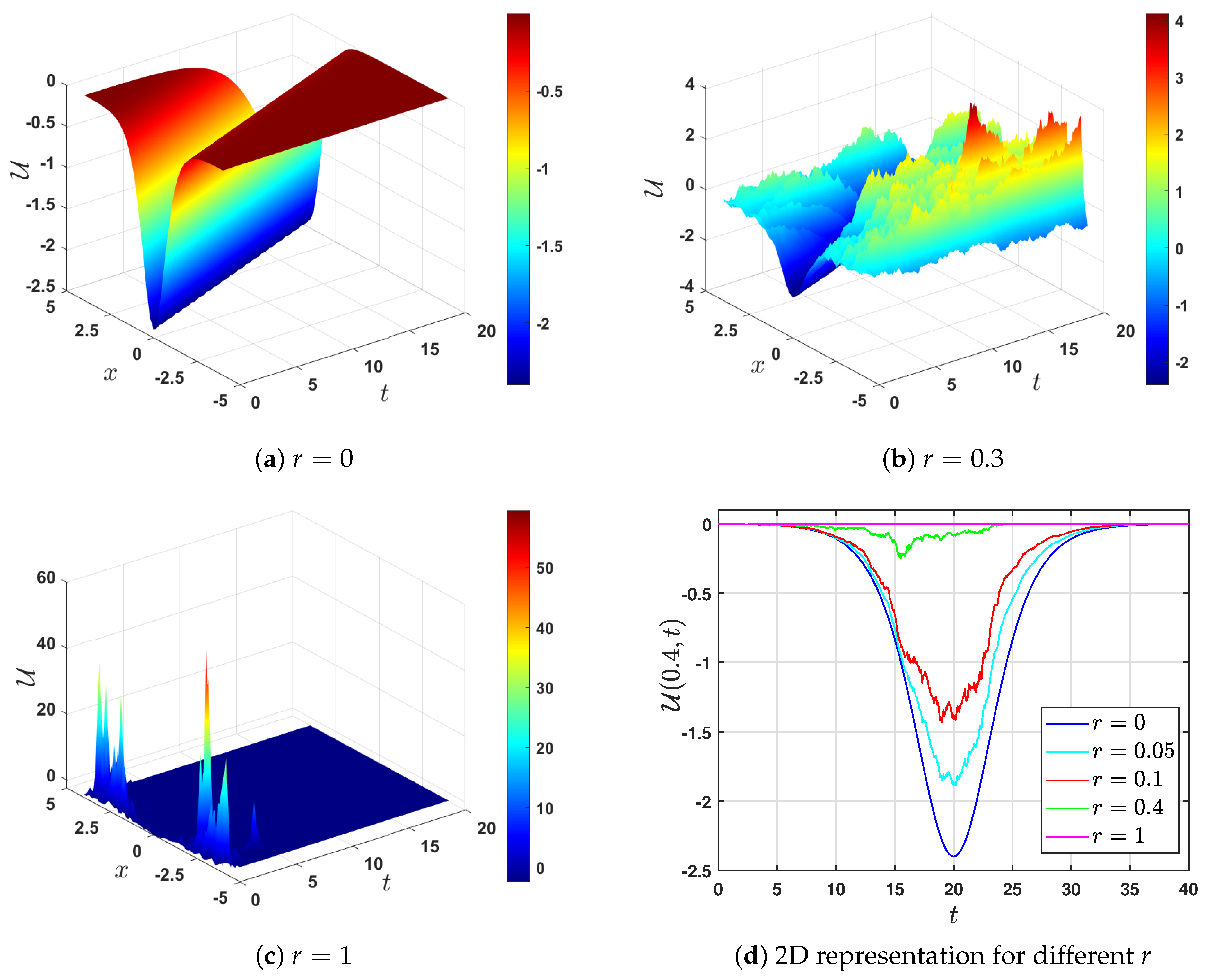
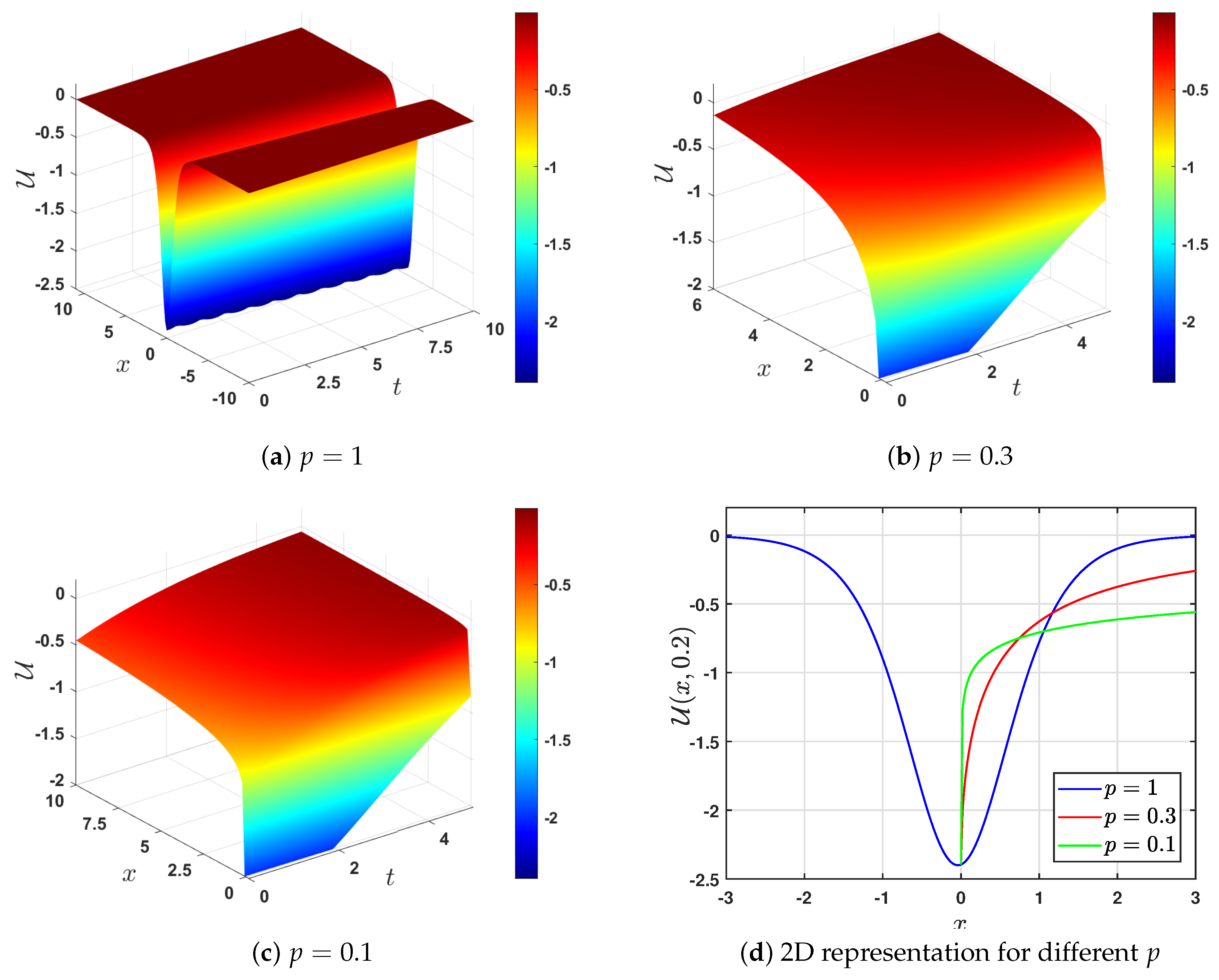
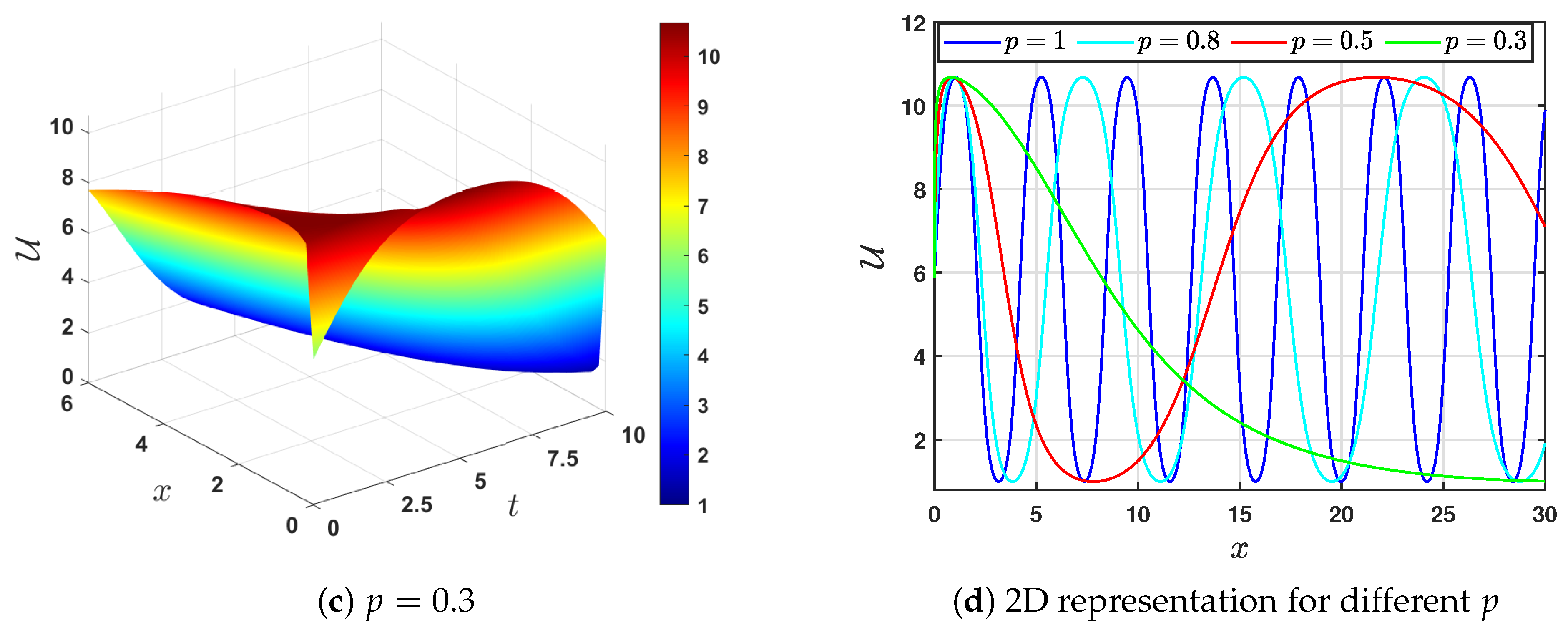
- By choosing and , we find . The roots of the polynomial (9) are (a double root) and (a simple root), with . Therefore, the possible solutions to Equation (52) are (39) and (41), correspondingly. These solutions depend on the intervals of g.Thus, we havei. For , Equation (52) has a solution of the formii. When , Equation (52) has a solution of the form
- (b)
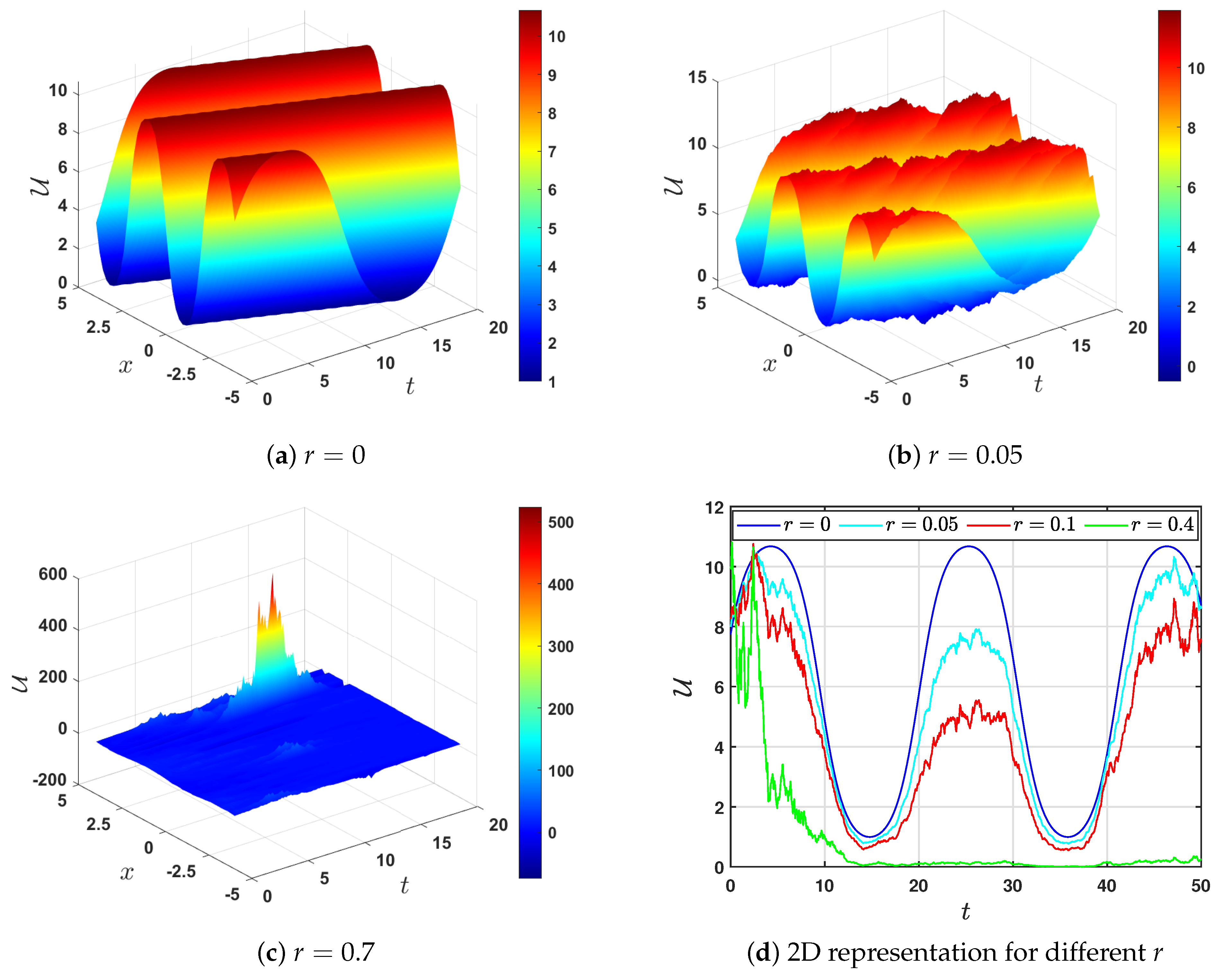
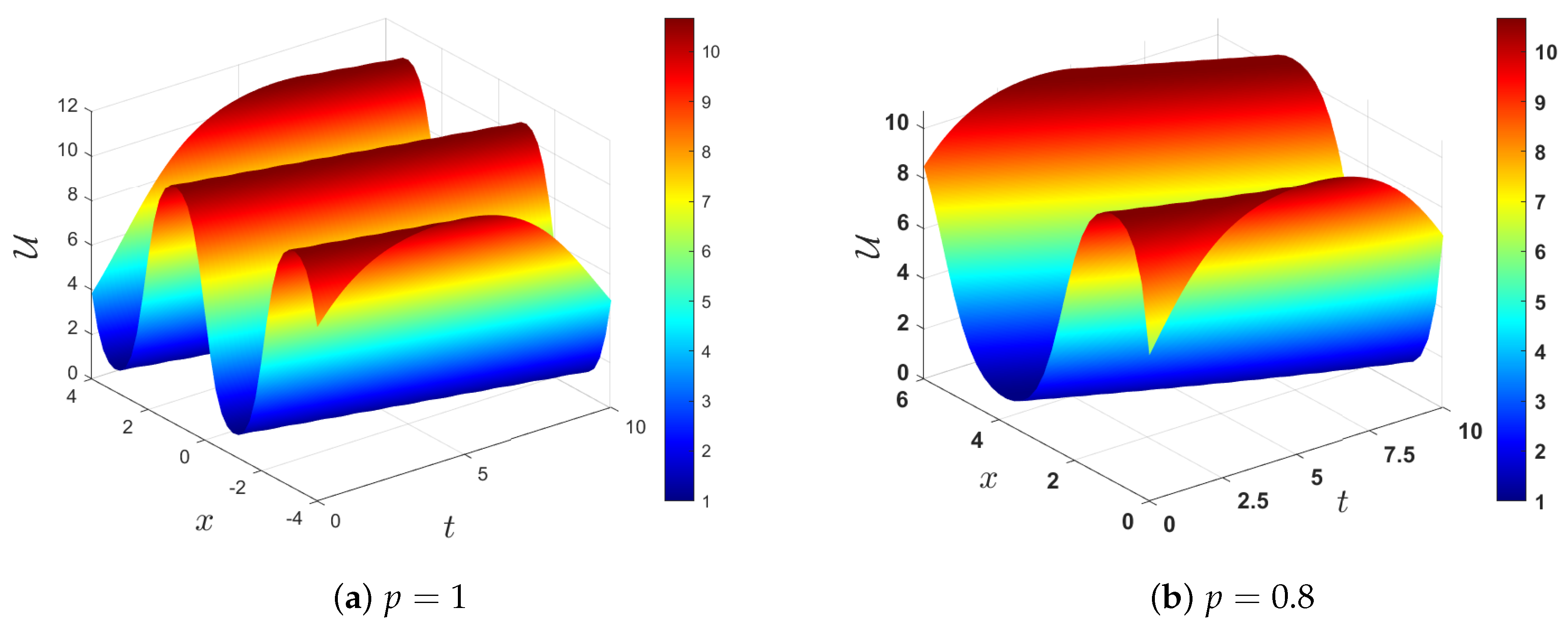
- Selecting and choosing , we find that . Hence, the derived solutions of (52) can be constructed by using Case 3 in both Table 1 and Table 2, depending on the sign of , which in turn depends on the sign of . Therefore, we select two values of and consider them separately as follows.If we choose , we find that , and consequently, we use Case 3 in Table 1. The roots of the polynomial (9) are , , and . Depending on the intervals of g, we havei. If , then Equation (52) has the solutionii. If , then Equation (52) has a solution in the formIf we select , then is negative and we utilize Table 2 to construct the solutions. Based on the intervals of real wave propagation, we havei. If , then Equation (52) has a solution in the formii. If , then Equation (52) has a solution in the form
6. Conclusions
- (i)
- It provides only real solutions for the given SFPDEs and its special cases because these solutions are obtained by integrating the differential form (10) over certain intervals of real wave propagation.
- (ii)
- It enables the construction of all possible solutions. This results in the existence of different intervals of real solutions, all subject to the same conditions on the physical parameters. In other words, with the same constraints on the physical parameters, we can derive different solutions. Thus, in the first case in Table 1, when and , there are two intervals of real solutions, and both lead to completely different solutions from both mathematical and physical viewpoints. The first solution is bounded and physically meaningful, while the second is unbounded, and has no physical interpretation. Therefore, the use of intervals of real solutions is significant and cannot be ignored.
- (iii)
- It isolates the bounded solutions, which can be obtained by integrating the differential form (10) over bounded intervals only.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ilhan, O.A.; Manafian, J. Periodic type and periodic cross-kink wave solutions to the (2+ 1)-dimensional breaking soliton equation arising in fluid dynamics. Mod. Phys. Lett. B 2019, 33, 1950277. [Google Scholar] [CrossRef]
- Ilhan, O.A.; Manafian, J.; Lakestani, M.; Singh, G. Some novel optical solutions to the perturbed nonlinear Schrödinger model arising in nano-fibers mechanical systems. Mod. Phys. Lett. B 2022, 36, 2150551. [Google Scholar] [CrossRef]
- Albalawi, S.M.; Elmandouh, A.A.; Sobhy, M. Integrability and dynamic behavior of a piezoelectro-magnetic circular rod. Mathematics 2024, 12, 236. [Google Scholar] [CrossRef]
- Aljuaidan, A.; Elbrolosy, M.; Elmandouh, A. Nonlinear Wave Propagation for a Strain Wave Equation of a Flexible Rod with Finite Deformation. Symmetry 2023, 15, 650. [Google Scholar] [CrossRef]
- Elmandouh, A. Bifurcation, quasi-periodic, chaotic pattern, and soliton solutions for a time-fractional dynamical system of ion sound and Langmuir waves. Math. Methods Appl. Sci. 2025, 48, 3825–3841. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; North-Holland Mathematical Studies; Elsevier Science Inc.: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Ali, A.I.; Kalim, M.; Khan, A. Solution of fractional partial differential equations using fractional power series method. Int. J. Differ. Equ. 2021, 2021, 6385799. [Google Scholar] [CrossRef]
- Bayrak, M.A.; Demir, A.; Ozbilge, E. A novel approach for the solution of fractional diffusion problems with conformable derivative. Numer. Methods Partial. Differ. Equ. 2023, 39, 1870–1887. [Google Scholar] [CrossRef]
- Bayrak, M.A.; Demir, A.; Ozbilge, E. On the numerical solution of conformable fractional diffusion problem with small delay. Numer. Methods Partial. Differ. Equ. 2022, 38, 177–189. [Google Scholar] [CrossRef]
- Thabet, H.; Kendre, S. Analytical solutions for conformable space-time fractional partial differential equations via fractional differential transform. Chaos Solitons Fractals 2018, 109, 238–245. [Google Scholar] [CrossRef]
- Thabet, H.; Kendre, S.; Peters, J. Advances in solving conformable nonlinear partial differential equations and new exact wave solutions for Oskolkov-type equations. Math. Methods Appl. Sci. 2022, 45, 2658–2673. [Google Scholar] [CrossRef]
- Siddique, I.; Mehdi, K.B.; Jaradat, M.M.; Zafar, A.; Elbrolosy, M.E.; Elmandouh, A.A.; Sallah, M. Bifurcation of some new traveling wave solutions for the time–space M-fractional MEW equation via three altered methods. Results Phys. 2022, 41, 105896. [Google Scholar] [CrossRef]
- Edwards, S.F.; Wilkinson, D. The surface statistics of a granular aggregate. Proc. R. Soc. Lond. Math. Phys. Sci. 1982, 381, 17–31. [Google Scholar]
- Liu, W.; Röckner, M. Stochastic Partial Differential Equations: An Introduction; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Li, Z.; Liu, C. Chaotic pattern and traveling wave solution of the perturbed stochastic nonlinear Schrödinger equation with generalized anti-cubic law nonlinearity and spatio-temporal dispersion. Results Phys. 2024, 56, 107305. [Google Scholar] [CrossRef]
- Elmandouh, A.; Al Nuwairan, M.; El-Dessoky, M. Nonlinear Dynamical Analysis and New Solutions of the Space-Fractional Stochastic Davey—Stewartson Equations for Nonlinear Water Waves. Mathematics 2025, 13, 692. [Google Scholar] [CrossRef]
- Almutairi, B.; Al Nuwairan, M.; Aldhafeeri, A. Exploring the Exact Solution of the Space-Fractional Stochastic Regularized Long Wave Equation: A Bifurcation Approach. Fractal Fract. 2024, 8, 298. [Google Scholar] [CrossRef]
- Oksendal, B. Stochastic Differential Equations: An Introduction with Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Islam, S.R.; Khan, K.; Akbar, M.A. Exact solutions of unsteady Korteweg-de Vries and time regularized long wave equations. SpringerPlus 2015, 4, 124. [Google Scholar] [CrossRef]
- Aminikhah, H.; Refahi Sheikhani, A.; Rezazadeh, H. Sub-equation method for the fractional regularized long-wave equations with conformable fractional derivatives. Sci. Iran. 2016, 23, 1048–1054. [Google Scholar] [CrossRef]
- Abdel-Salam, E.A.B.; Yousif, E.A. Solution of Nonlinear Space-Time Fractional Differential Equations Using the Fractional Riccati Expansion Method. Math. Probl. Eng. 2013, 2013, 846283. [Google Scholar] [CrossRef]
- Korkmaz, A.; Hepson, O.E.; Hosseini, K.; Rezazadeh, H.; Eslami, M. Sine-Gordon expansion method for exact solutions to conformable time fractional equations in RLW-class. J. King Saud-Univ.-Sci. 2020, 32, 567–574. [Google Scholar] [CrossRef]
- Jhangeer, A.; Muddassar, M.; Kousar, M.; Infal, B. Multistability and dynamics of fractional regularized long wave equation with conformable fractional derivatives. Ain Shams Eng. J. 2021, 12, 2153–2169. [Google Scholar] [CrossRef]
- Güner, Ö.; Eser, D. Exact solutions of the space time fractional symmetric regularized long wave equation using different methods. Adv. Math. Phys. 2014, 2014, 456804. [Google Scholar] [CrossRef]
- Maarouf, N.; Maadan, H.; Hilal, K. Lie symmetry analysis and explicit solutions for the time-fractional regularized long-wave equation. Int. J. Differ. Equ. 2021, 2021, 6614231. [Google Scholar] [CrossRef]
- Naeem, M.; Yasmin, H.; Shah, R.; Shah, N.A.; Nonlaopon, K. Investigation of fractional nonlinear regularized long-wave models via novel techniques. Symmetry 2023, 15, 220. [Google Scholar] [CrossRef]
- Jumarie, G. Modified Riemann-Liouville derivative and fractional Taylor series of nondifferentiable functions further results. Comput. Math. Appl. 2006, 51, 1367–1376. [Google Scholar] [CrossRef]
- Einstein, A. Über die von der molekularkinetischen Theorie der Wärme geforderte Bewegung von in ruhenden Flüssigkeiten suspendierten Teilchen. Ann. Phys. 1905, 322, 549–560. [Google Scholar] [CrossRef]
- Black, F.; Scholes, M. The pricing of options and corporate liabilities. J. Political Econ. 1973, 81, 637–654. [Google Scholar] [CrossRef]
- Platen, E.; Bruti-Liberati, N. Numerical Solution of Stochastic Differential Equations with Jumps in Finance; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010; Volume 64. [Google Scholar]
- Mohammed, W.W.; Ali, E.E.; Ahmed, A.I.; Ennaceur, M. Abundant Elliptic, Trigonometric, and Hyperbolic Stochastic Solutions for the Stochastic Wu–Zhang System in Quantum Mechanics. Mathematics 2025, 13, 714. [Google Scholar] [CrossRef]
- Zayed, E.M.; Ahmed, M.S.; Arnous, A.H.; Yıldırım, Y. Novel soliton solutions of the (3+ 1)-dimensional stochastic nonlinear Schrödinger equation in birefringent fibers. Chaos Solitons Fractals 2025, 194, 116152. [Google Scholar] [CrossRef]
- Yang, L.; Hou, X.; Zeng, Z. A complete discrimination system for polynomials. Sci. China Ser. E 1996, 39, 628–646. [Google Scholar]
- Byrd, P.F.; Friedman, M.D. Handbook of Elliptic Integrals for Engineers and Scientists; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1971; p. xvi+358. [Google Scholar]
- Higham, D.J. An algorithmic introduction to numerical simulation of stochastic differential equations. SIAM Rev. 2001, 43, 525–546. [Google Scholar] [CrossRef]
- Zayed, E.M.; Al-Nowehy, A.G. New extended auxiliary equation method for finding many new Jacobi elliptic function solutions of three nonlinear Schrödinger equations. Waves Random Complex Media 2017, 27, 420–439. [Google Scholar] [CrossRef]
- Wang, M.; Li, X.; Zhang, J. The (G′/G)-expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physics. Phys. Lett. A 2008, 372, 417–423. [Google Scholar] [CrossRef]
- Herrmann, R. Fractional Calculus: An Introduction for Physicists, 2nd ed.; World Scientific: Singapore, 2014. [Google Scholar]
- Van den Broeck, C. Stochastic Processes in Physics and Chemistry, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Horsthemke, W.; Lefever, R. Noise-Induced Transitions: Theory and Applications in Physics, Chemistry, and Biology; Springer Series in Synergetics; Springer: Berlin/Heidelberg, Germany, 1984; Volume 15, p. xvi+322. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al Nuwairan, M.; Elmandouh, A. Modification to an Auxiliary Function Method for Solving Space-Fractional Stochastic Regularized Long-Wave Equation. Fractal Fract. 2025, 9, 298. https://doi.org/10.3390/fractalfract9050298
Al Nuwairan M, Elmandouh A. Modification to an Auxiliary Function Method for Solving Space-Fractional Stochastic Regularized Long-Wave Equation. Fractal and Fractional. 2025; 9(5):298. https://doi.org/10.3390/fractalfract9050298
Chicago/Turabian StyleAl Nuwairan, Muneerah, and Adel Elmandouh. 2025. "Modification to an Auxiliary Function Method for Solving Space-Fractional Stochastic Regularized Long-Wave Equation" Fractal and Fractional 9, no. 5: 298. https://doi.org/10.3390/fractalfract9050298
APA StyleAl Nuwairan, M., & Elmandouh, A. (2025). Modification to an Auxiliary Function Method for Solving Space-Fractional Stochastic Regularized Long-Wave Equation. Fractal and Fractional, 9(5), 298. https://doi.org/10.3390/fractalfract9050298