
Nonlinear Dynamic Characteristics of Single-Point Suspension Isolation System of Maglev Vehicle Based on Fractional-Order Nonlinear Nishimura Model


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
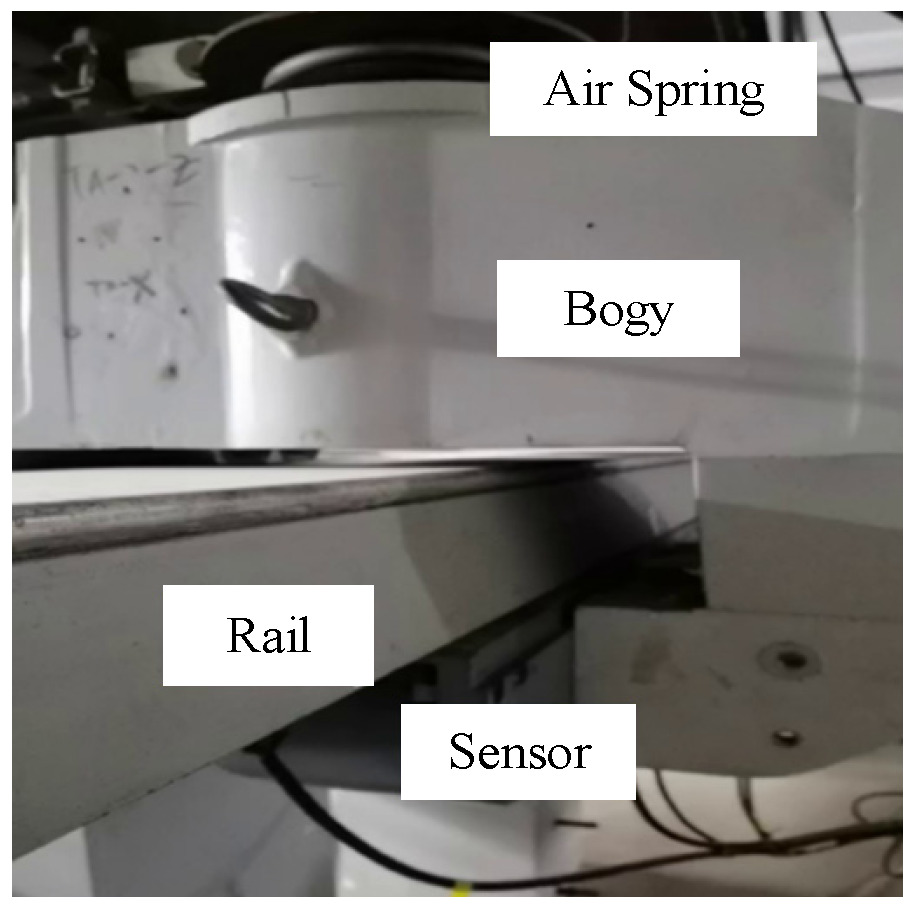
2. Fundamental Excitation Source in the Suspension System
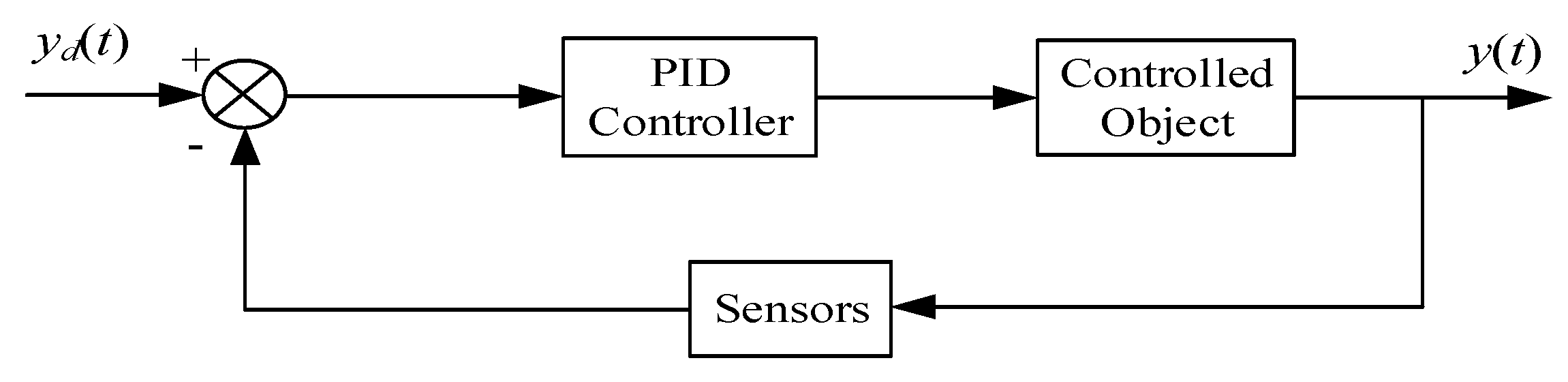
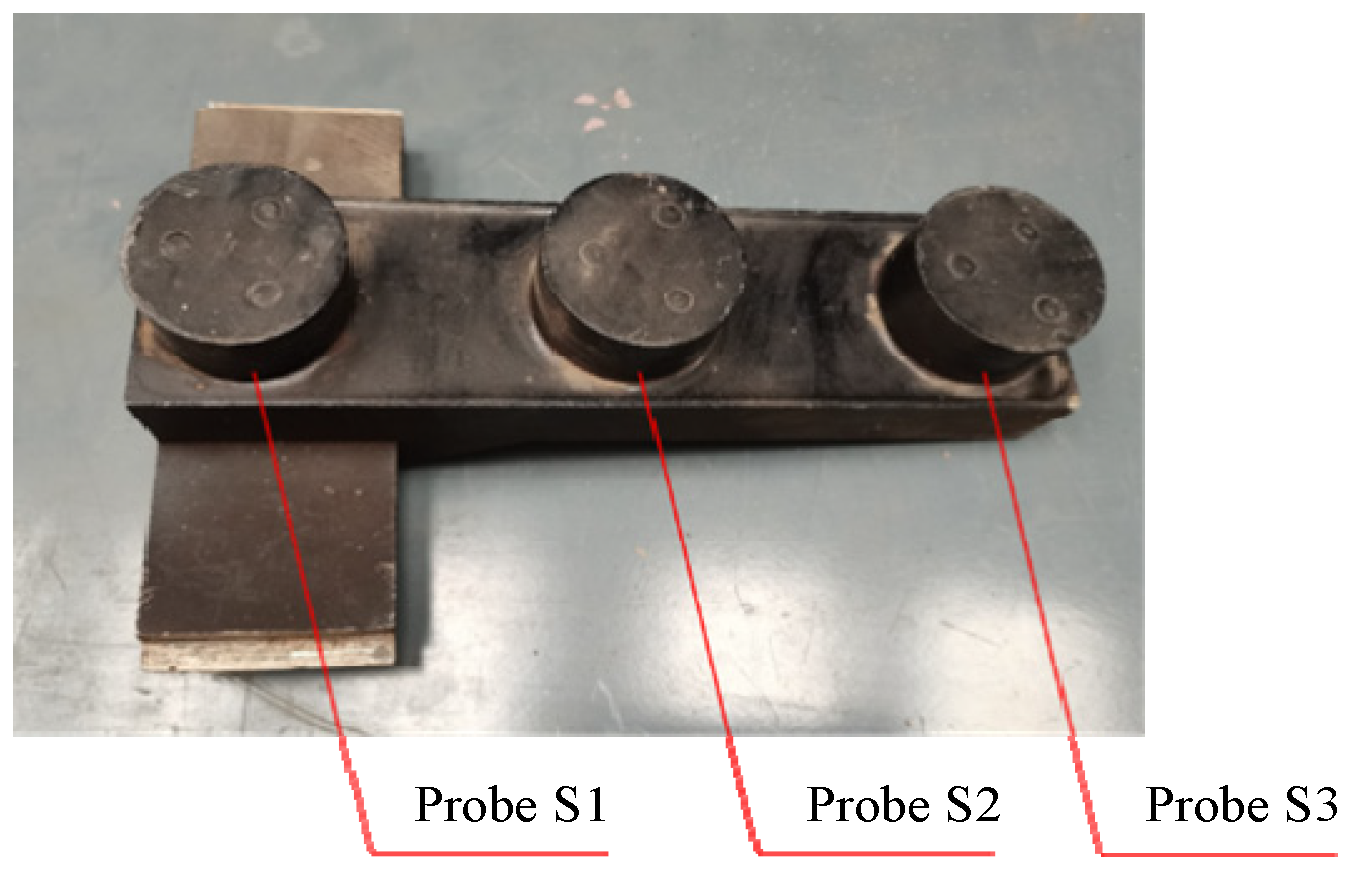
2.1. Control Strategy and Gap Sensor Design for Suspension System
2.2. Clearance Variation Characteristics of Suspension System
3. Dynamic Model and Steady-State Response Solution of Fractional-Order Vibration Isolation System
3.1. Equation of the Dynamics for the Vibration Isolation System
3.2. Fractional Calculus and Approximation Schemes
3.3. Solution of the Steady-State Response
3.4. Motion State and Stability Identification
4. Results and Discussion
4.1. The Characteristics of the Amplitude of Main Resonance Excitation and Response
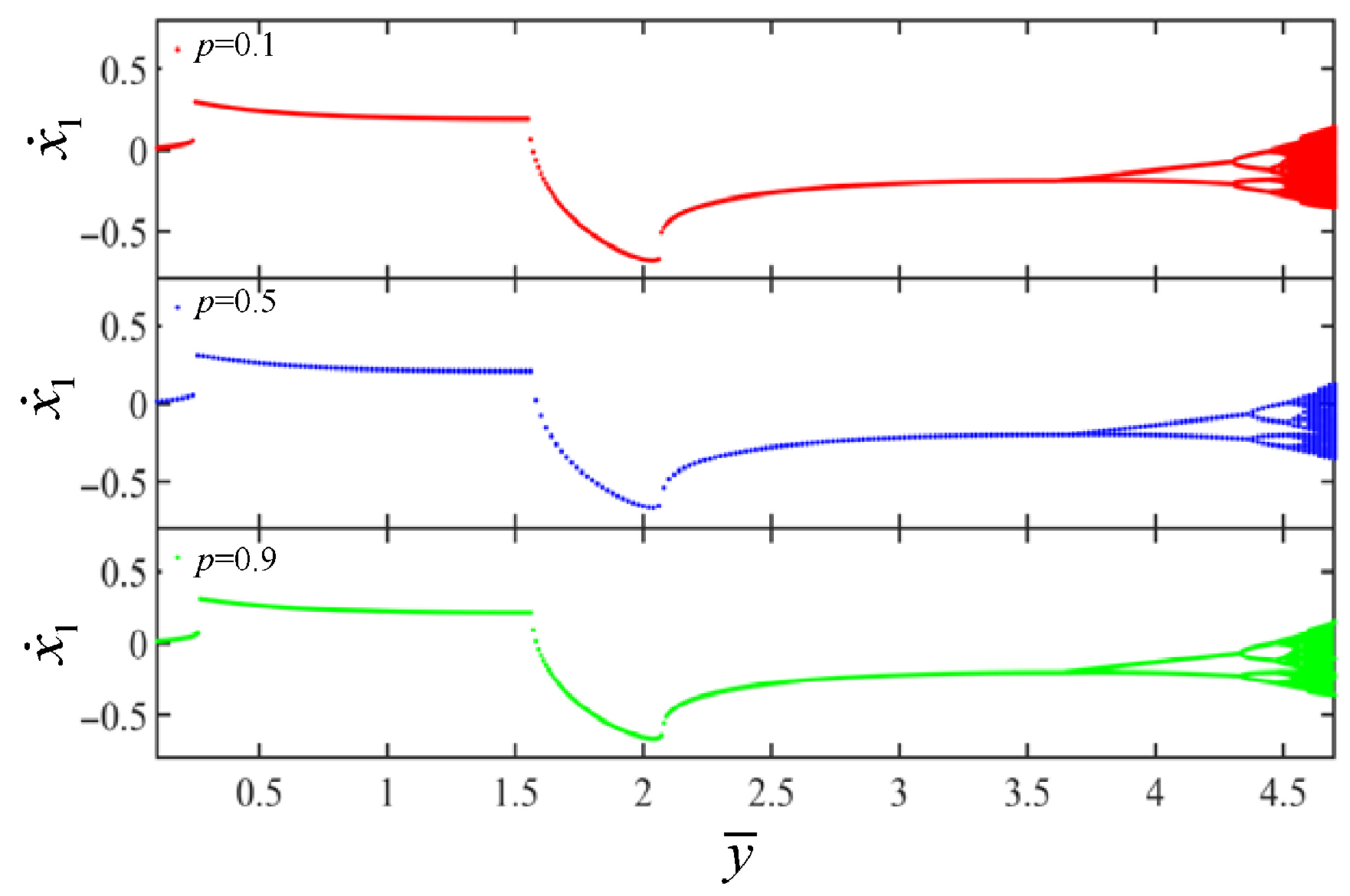
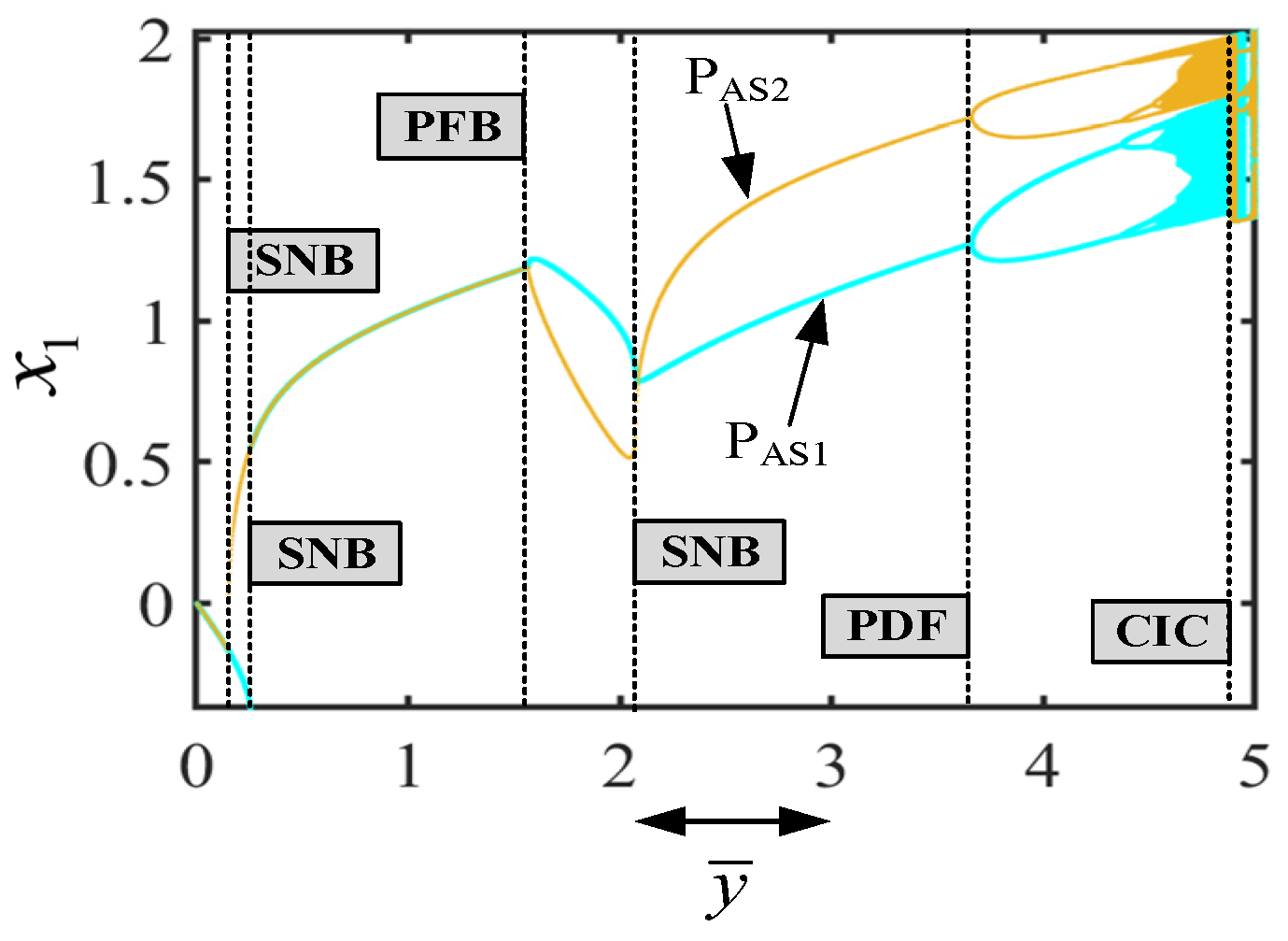
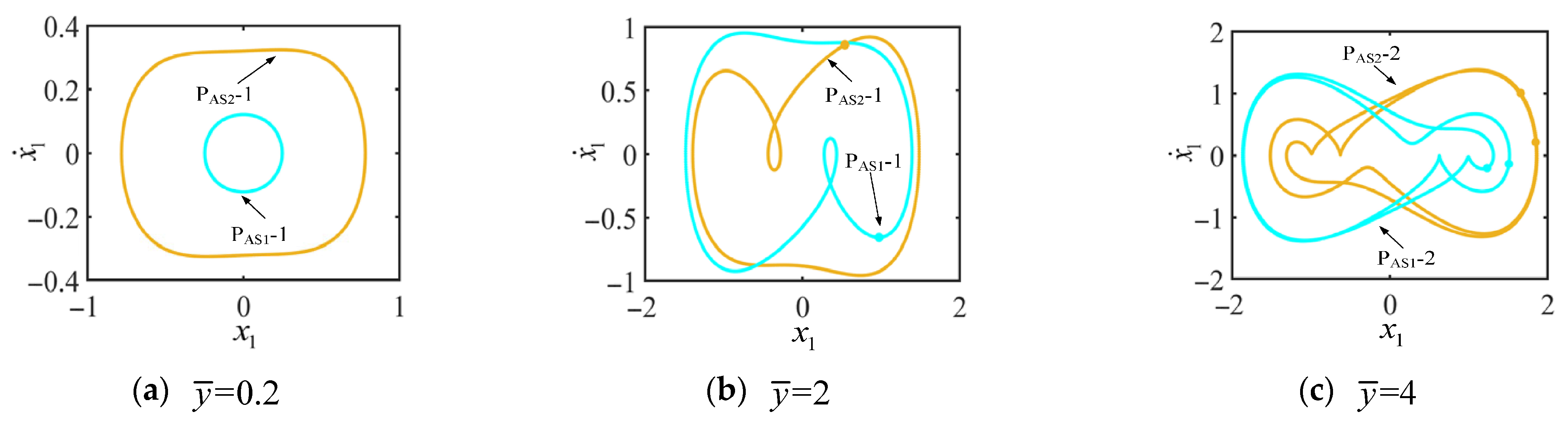
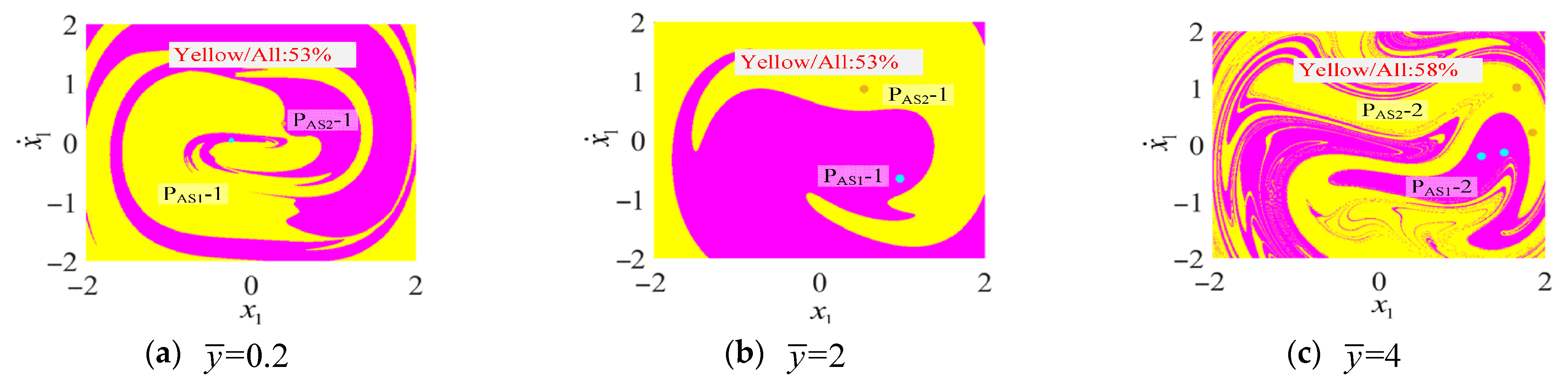
4.2. The Impact of Suspension Gap Amplitude on the Diversity of Periodic Motion Characteristics
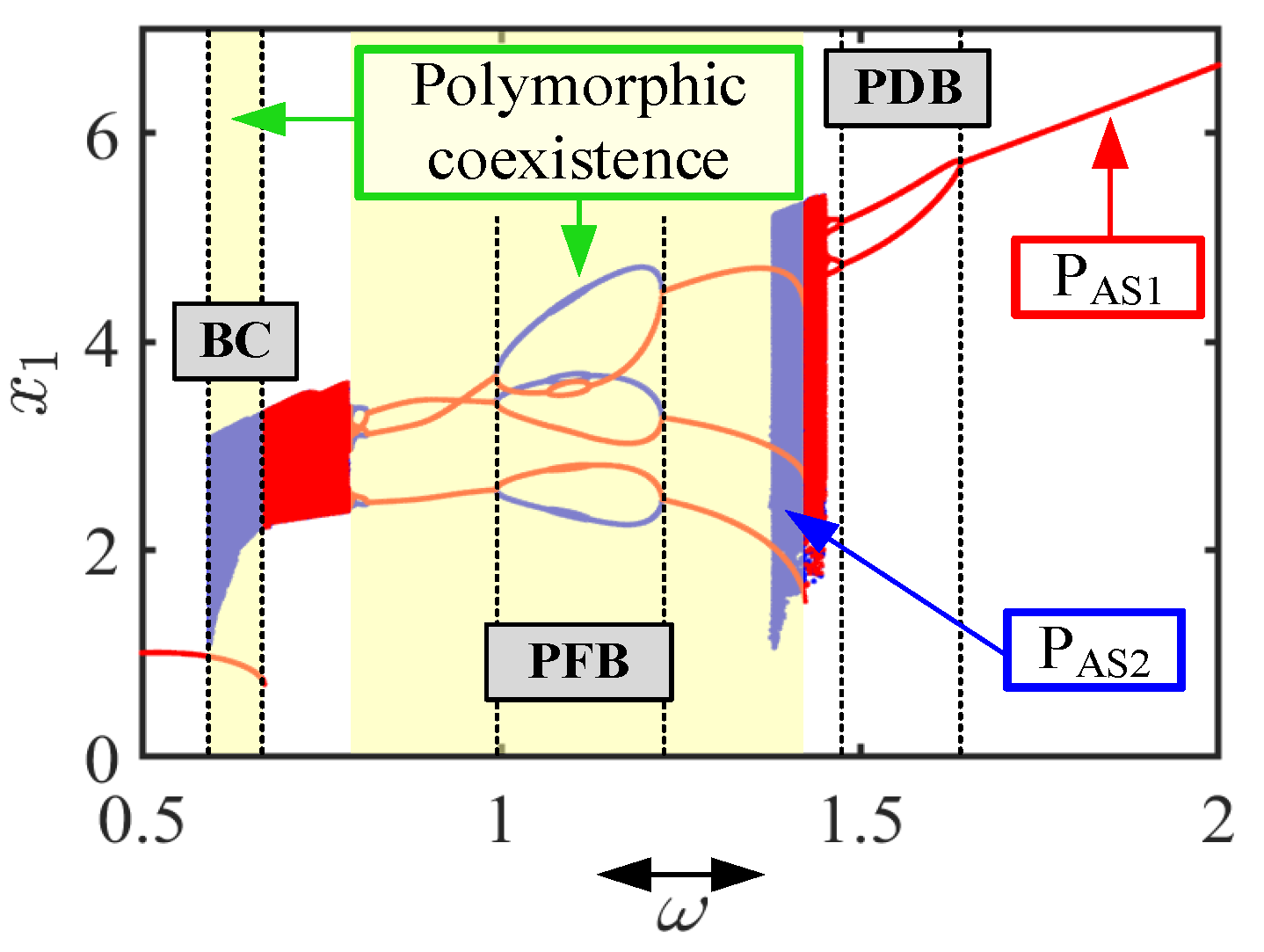
4.3. The Impact of Varying Frequencies on the Diversity of Periodic Motion Characteristics
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| SNB | Saddle-node bifurcation |
| PFB | Pitchfork bifurcation |
| PDB | Period-doubled bifurcation |
| CIC | Catastrophic Bifurcation |
| BC | Boundary Crisis |
| IPFB | Inverse pitchfork bifurcation |
| IPDB | Inverse period-doubled bifurcation |
References
- Li, Q.; Li, S.; Li, F.; Xu, D.; He, Z. Analysis and Experiment of Vibration Isolation Performance of a Magnetic Levitation Vibration Isolator with Rectangular Permanent Magnets. J. Vib. Eng. Technol. 2020, 8, 751–760. [Google Scholar] [CrossRef]
- Chen, X.; Sun, J.; Li, M.; Jiao, W.; Jiang, Y.; Hu, J. Compact Multiphysics Coupling Modeling and Analysis of Self-Excited Vibration in Maglev Trains. Appl. Math. Model. 2025, 141, 115915. [Google Scholar] [CrossRef]
- Wang, S.M.; Ni, Y.Q.; Sun, Y.G.; Lu, Y.; Duan, Y.F. Modelling Dynamic Interaction of Maglev Train–Controller–Rail–Bridge System by Vector Mechanics. J. Sound Vib. 2022, 533, 117023. [Google Scholar] [CrossRef]
- Tian, X.; Xiang, H.; Li, Y. Modeling and Analyzing of High-Speed Maglev Train-Bridge Systems Considering Centrifugal Force Induced by Bridge Vertical Deformation. Structures 2025, 73, 108240. [Google Scholar] [CrossRef]
- Liang, S.; Zhai, M.; Long, Z. Parameter Impact Analysis and Vibration Control for High Speed Maglev Train-Track Coupling System with Experimental Verification. IEEE Trans. Veh. Technol 2025, 1–16. [Google Scholar] [CrossRef]
- Yu, Y.; Zhou, W.; Zhang, Z.; Bi, Q. Analysis on the Motion of Nonlinear Vibration with Fractional Order and Time Variable Mass. Appl. Math. Lett. 2022, 124, 107621. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, R.; Liu, J. Vibrational Resonance Analysis in a Fractional Order Toda Oscillator Model with Asymmetric Potential. Int. J. Non-Linear Mech. 2023, 148, 104258. [Google Scholar] [CrossRef]
- Zhao, K.; Ning, L. Vibrational Resonance in a Fractional Order System with Asymmetric Bistable Potential and Time Delay Feedback. Chin. J. Phys. 2022, 77, 1796–1809. [Google Scholar] [CrossRef]
- Li, H.; Li, J.; Hong, G.; Dong, J.; Ning, Y. Fractional-Order Model and Experimental Verification of Granules-Beam Coupled Vibration. Mech. Syst. Signal Process. 2023, 200, 110536. [Google Scholar] [CrossRef]
- Chen, Y.; Tai, Y.; Xu, J.; Xu, X.; Chen, N. Vibration Analysis of a 1-DOF System Coupled with a Nonlinear Energy Sink with a Fractional Order Inerter. Sensors 2022, 22, 6408. [Google Scholar] [CrossRef]
- Wang, M.; Zhao, J.; Wang, R.; Qin, C.; Liu, P. Dynamical Characterisation of Fractional-Order Duffing-Holmes Systems Containing Nonlinear Damping Under Constant Simple Harmonic Excitation. Chaos Solitons Fractals 2025, 190, 115745. [Google Scholar] [CrossRef]
- Ren, Y.; Li, L.; Wang, W.; Wang, L.; Pang, W. Magnetically Suspended Control Sensitive Gyroscope Rotor High-Precision Deflection Decoupling Method Using Quantum Neural Network and Fractional-Order Terminal Sliding Mode Control. Fractal Fract. 2024, 8, 120. [Google Scholar] [CrossRef]
- Ivanov, D. Identification of Fractional Models of an Induction Motor with Errors in Variables. Fractal Fract. 2023, 7, 485. [Google Scholar] [CrossRef]
- Han, Y.X.; Zhang, J.X.; Wang, Y.L. Dynamic Behavior of a Two-Mass Nonlinear Fractional-Order Vibration System. Front. Phys. 2024, 12, 1452138. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, F.; Zhang, Y.; Zheng, Z.; Ma, J.; Fu, C. Fractional-Order Modeling and Stochastic Dynamics Analysis of a Nonlinear Rubbing Overhung Rotor System. Fractal Fract. 2024, 8, 643. [Google Scholar] [CrossRef]
- Cao, J.; Ma, C.; Jiang, Z.; Liu, S. Nonlinear Dynamic Analysis of Fractional Order Rub-Impact Rotor System. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1443–1463. [Google Scholar] [CrossRef]
- Hou, J.; Niu, J.; Shen, Y.; Yang, S.; Zhang, W. Dynamic Analysis and Vibration Control of Two-Degree-of-Freedom Boring Bar with Fractional-Order Model of Magnetorheological Fluid. J. Vib. Control 2022, 28, 3001–3018. [Google Scholar] [CrossRef]
- Boulaaras, S.; Sriramulu, S.; Arunachalam, S.; Allahem, A.; Alharbi, A.; Radwan, T. Chaos and Stability Analysis of the Nonlinear Fractional-Order Autonomous System. Alex. Eng. J. 2025, 118, 278–291. [Google Scholar] [CrossRef]
- Niu, J.; Wang, L.; Shen, Y.; Zhang, W. Vibration Control of Primary and Subharmonic Simultaneous Resonance of Nonlinear System with Fractional-Order Bingham Model. Int. J. Non-Linear Mech. 2022, 141, 103947. [Google Scholar] [CrossRef]
- Yang, F.; Wang, P.; Wei, K.; Wang, F. Investigation on Nonlinear and Fractional Derivative Zener Model of Coupled Vehicle-Track System. Veh. Syst. Dyn. 2020, 58, 864–889. [Google Scholar] [CrossRef]
- Chang, Y.; Zhu, Y.; Li, Y.; Wang, M. Dynamical Analysis of a Fractional-Order Nonlinear Two-Degree-of-Freedom Vehicle System by Incremental Harmonic Balance Method. J. Low Freq. Noise Vib. Act. Control. 2024, 43, 706–728. [Google Scholar] [CrossRef]
- Dai, J.; Lim, J.G.Y.; Ang, K.K. Dynamic Response Analysis of High-Speed Maglev-Guideway System. J. Vib. Eng. Technol. 2023, 11, 2647–2658. [Google Scholar] [CrossRef]
- Sun, Y.; He, Z.; Xu, J.; Sun, W.; Lin, G. Dynamic Analysis and Vibration Control for a Maglev Vehicle-Guideway Coupling System with Experimental Verification. Mech. Syst. Signal Process. 2023, 188, 109954. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Guo, W.; Pi, T.; Li, X. Vibration Analysis of Nonlinear Damping Systems by the Discrete Incremental Harmonic Balance Method. Nonlinear Dyn. 2023, 111, 2009–2028. [Google Scholar] [CrossRef]
- Qu, M.; Yang, Q.; Wu, S.; Ding, W.; Li, J.; Li, G. Analysis of Super-Harmonic Resonance and Periodic Motion Transition of Fractional Nonlinear Vibration Isolation System. J. Low Freq. Noise Vib. Act. Control. 2023, 42, 771–788. [Google Scholar] [CrossRef]
- Shen, Y.J.; Wen, S.F.; Li, X.H.; Yang, S.P.; Xing, H.J. Dynamical Analysis of Fractional-Order Nonlinear Oscillator by Incremental Harmonic Balance Method. Nonlinear Dyn. 2016, 85, 1457–1467. [Google Scholar] [CrossRef]
- Kong, F.; Han, R.; Zhang, Y. Approximate Stochastic Response of Hysteretic System with Fractional Element and Subjected to Combined Stochastic and Periodic Excitation. Nonlinear Dyn. 2022, 107, 375–390. [Google Scholar] [CrossRef]
- Li, G.; Sun, J.; Ding, W. Dynamics of a Vibro-Impact System by the Global Analysis Method in Parameter-State Space. Nonlinear Dyn. 2019, 97, 541–557. [Google Scholar] [CrossRef]
- Qu, M.; Wang, L.; Jin, Q.; Zhou, D.; Li, J. Nonlinear Dynamics of Nishimura Model-Based Fractional-Order Vibration Isolation System Under the Synergistic Effect of Aerodynamic Lift and Harmonic Excitation. Nonlinear Dyn. 2025, 113, 12693–12717. [Google Scholar] [CrossRef]
- Gyebrószki, G.; Csernák, G. Clustered Simple Cell Mapping: An Extension to the Simple Cell Mapping Method. Commun. Nonlinear Sci. Numer. Simul. 2017, 42, 607–622. [Google Scholar] [CrossRef]
- Zhang, Z.; Dai, L. The Application of the Cell Mapping Method in the Characteristic Diagnosis of Nonlinear Dynamical Systems. Nonlinear Dyn. 2023, 111, 18095–18112. [Google Scholar] [CrossRef]
- Chandrashekar, A.; Belardinelli, P.; Staufer, U.; Alijani, F. Robustness of Attractors in Tapping Mode Atomic Force Microscopy. Nonlinear Dyn. 2019, 97, 1137–1158. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, M.; Wang, L.; Gu, S.; Yu, P.; Li, Q.; Zhou, D.; Li, J. Nonlinear Dynamic Characteristics of Single-Point Suspension Isolation System of Maglev Vehicle Based on Fractional-Order Nonlinear Nishimura Model. Fractal Fract. 2025, 9, 294. https://doi.org/10.3390/fractalfract9050294
Qu M, Wang L, Gu S, Yu P, Li Q, Zhou D, Li J. Nonlinear Dynamic Characteristics of Single-Point Suspension Isolation System of Maglev Vehicle Based on Fractional-Order Nonlinear Nishimura Model. Fractal and Fractional. 2025; 9(5):294. https://doi.org/10.3390/fractalfract9050294
Chicago/Turabian StyleQu, Minghe, Lianchun Wang, Shijie Gu, Peichang Yu, Qicai Li, Danfeng Zhou, and Jie Li. 2025. "Nonlinear Dynamic Characteristics of Single-Point Suspension Isolation System of Maglev Vehicle Based on Fractional-Order Nonlinear Nishimura Model" Fractal and Fractional 9, no. 5: 294. https://doi.org/10.3390/fractalfract9050294
APA StyleQu, M., Wang, L., Gu, S., Yu, P., Li, Q., Zhou, D., & Li, J. (2025). Nonlinear Dynamic Characteristics of Single-Point Suspension Isolation System of Maglev Vehicle Based on Fractional-Order Nonlinear Nishimura Model. Fractal and Fractional, 9(5), 294. https://doi.org/10.3390/fractalfract9050294