
Control of Semilinear Differential Equations with Moving Singularities



{kind=link}
{kind=link}
Abstract
1. Introduction and Preliminaries
- (a)
- The first motivation concerns differential equations with moving singularities, which frequently appear in nonlinear models from applied sciences, such as physics and mathematical biology [1].
- (b)
- The second one relates to the control of such models, aiming to reach a desired state of the process. For example, if the state variable represents a density, one might be interested in controlling its cumulative value or average. This corresponds precisely to our control problem in Section 2.
- (h1)
- For each and , there exists a constant , such that for all and for all , we have
- (h1)
- The mappingsare continuous. Additionally, the map is continuous for , , and .
2. Auxiliary Lemmas and New Controllability Result
2.1. Proprieties of the Solutions
2.2. The Continuity of
- (h3)
- There exists a constant such that, for all , one hasfor all and all , where and the map is continuous.
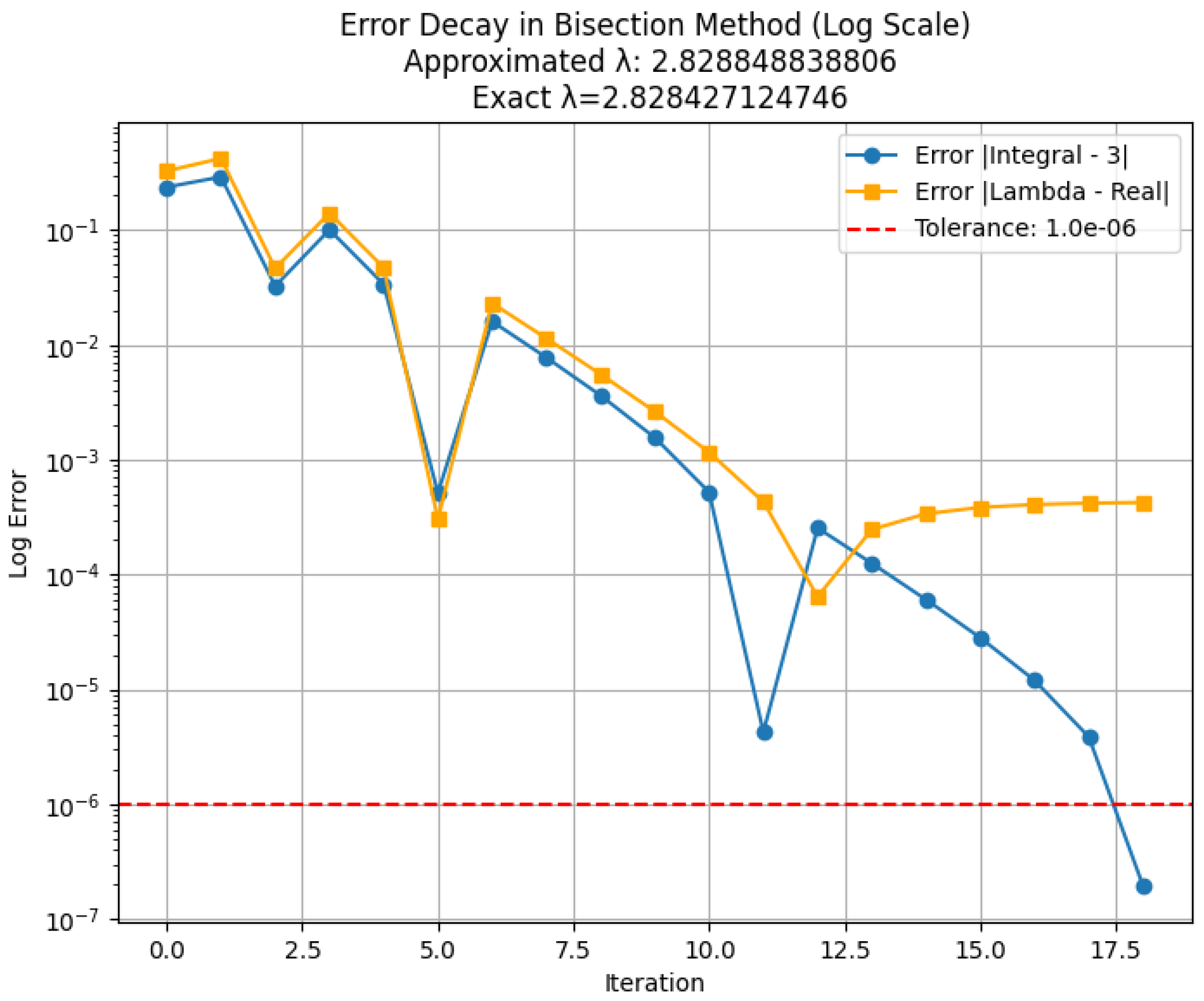
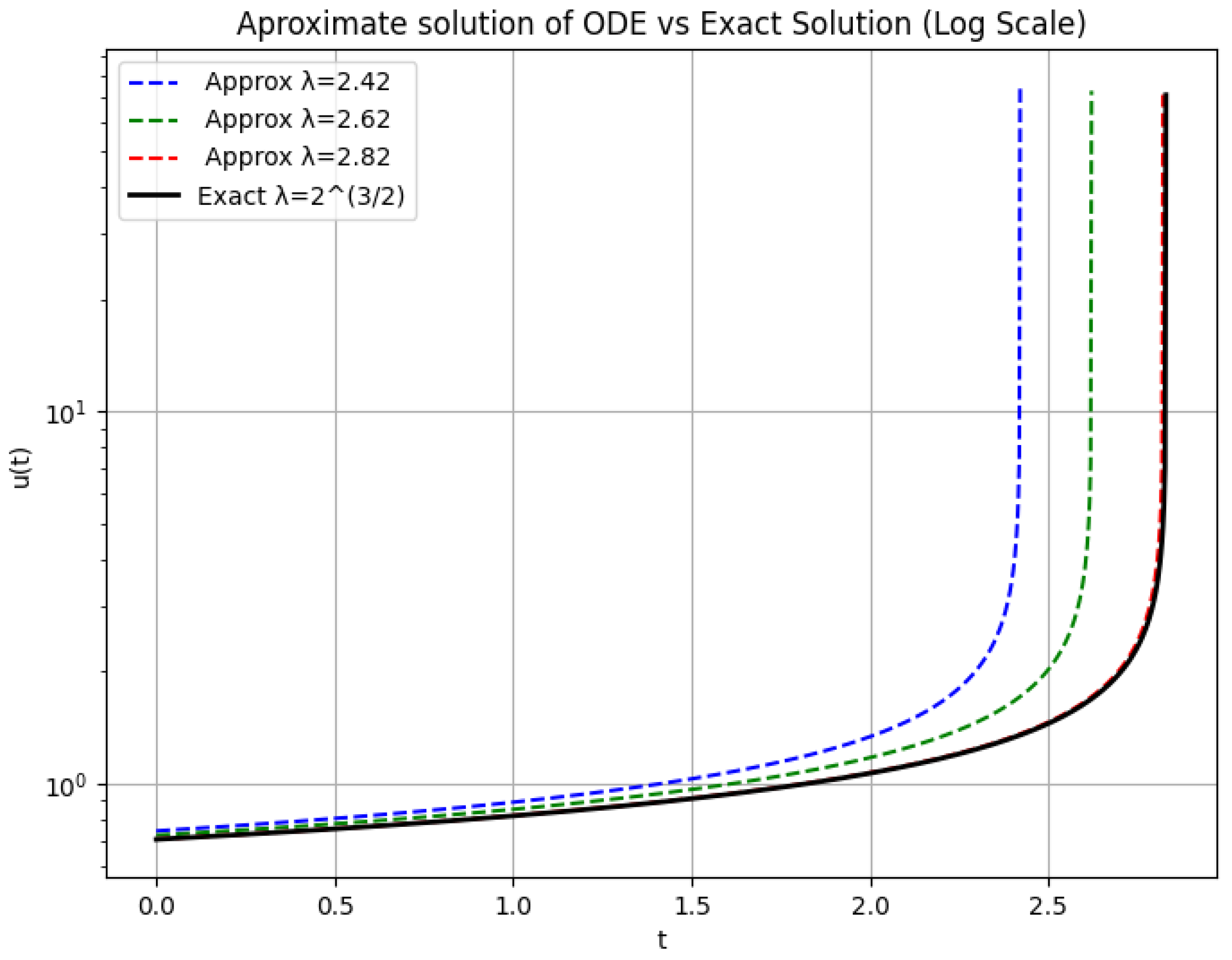
3. Approximate Solving of the Control Problem
| Algorithm 1: Bisection algorithm |
Step 0 (initialization): . Step compute
Stop criterion: if then (with error ). |
- (h3′)
- , there exists a constant such that, for all , one hasfor all and all , where and the map is continuous.
4. Extension to Fractional Differential Equations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Torres, P.J. Mathematical Models with Singularities: A Zoo of Singular Creatures; Atlantis Press: Amsterdam, The Netherlands, 2015. [Google Scholar]
- O’Regan, D. Theory of Singular Boundary Value Problems; World Scientific Publishing: River Edge, NJ, USA, 1994. [Google Scholar]
- Callegari, A.; Nachman, A. A nonlinear singular boundary value problem in the theory of pseudoplasitc fluids. SIAM J. Appl. Math. 1980, 38, 275–282. [Google Scholar]
- Gingold, H. Rosenblat, S. Differential equations with moving singularities. SIAM J. Math. Anal 1976, 7, 942–957. [Google Scholar]
- Gingold, H. Introduction to differential equations with moving singularities. Rocky Mt. J. Math. 1976, 6, 571–574. [Google Scholar] [CrossRef]
- Fila, M.; Takahashi, J.; Yanagida, E. Solutions with moving singularities for a one-dimensional nonlinear diffusion equation. Math. Ann. 2024, 390, 5383–5413. [Google Scholar] [CrossRef]
- Nicolescu, M.; Dinculeanu, N.; Marcus, S. Manual de Analiză Matematicăa (II); Editura Didactică şi Pedagogică: Bucureşti, Romania, 1964. (In Romanian) [Google Scholar]
- Haplea, I.Ş.; Parajdi, L.G.; Precup, R. On the controllability of a system modeling cell dynamics related to leukemia. Symmetry 2021, 13, 1867. [Google Scholar] [CrossRef]
- Precup, R. On some applications of the controllability principle for fixed point equations. Results Appl. Math. 2022, 13, 100236. [Google Scholar] [CrossRef]
- Coron, J.M. Control and Nonlinearity; AMS: Providence, RI, USA, 2007. [Google Scholar]
- Coddington, E.A. An Introduction to Ordinary Differential Equations; Dover: New York, NY, USA, 1961. [Google Scholar]
- Precup, R. Ordinary Differential Equations; De Gruyter: Berlin, Germany, 2018. [Google Scholar]
- O’Regan, D.; Precup, R. Theorems of Leray-Schauder Type and Applications; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Ciarlet, G. Linear and Nonlinear Functional Analysis with Applications; SIAM: Philadelphia, PA, USA, 2013. [Google Scholar]
- Le Dret, H. Nonlinear Elliptic Partial Differential Equations; Springer: Berlin, Germany, 2018. [Google Scholar]
- Gronwall, T.H. Note on the derivatives with respect to a parameter of the solutions of a system of differential equations. Ann. Math. 1919, 20, 292–296. [Google Scholar]
- Pachpatte, B.G.; Ames, W.F. Inequalities for Differential and Integral Equations; Academic Press: Cambridge, MA, USA, 1997. [Google Scholar]
- Rudin, W. Principles of Mathematical Analysis; MacGraw-Hill: New York, NY, USA, 1976. [Google Scholar]
- Parajdi, L.G.; Precup, R.; Haplea, I.S. A method of lower and upper solutions for control problems and application to a model of bone marrow transplantation. Int. J. Appl. Math. Comput. Sci. 2023, 33, 409–418. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach Science Publishers: Yverdon, Switzerland, 1993. [Google Scholar]
- Kilbas, A.A.; Trujillo, J.J. Differentiale equations of fractional order: Methods, results and problems-I. Appl. Anal. 2001, 78, 153–192. [Google Scholar]
- Benchohra, M.; Hamani, S.; Ntouyas, S.K. Boundary value problems for differential equations with fractional order and nonlocal conditions. Nonlinear Anal. 2009, 71, 2391–2396. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Mathematics in Sciences and Engineering; Academic Press: San Diego, CA, USA, 1999; Volume 198. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Precup, R.; Stan, A.; Du, W.-S. Control of Semilinear Differential Equations with Moving Singularities. Fractal Fract. 2025, 9, 198. https://doi.org/10.3390/fractalfract9040198
Precup R, Stan A, Du W-S. Control of Semilinear Differential Equations with Moving Singularities. Fractal and Fractional. 2025; 9(4):198. https://doi.org/10.3390/fractalfract9040198
Chicago/Turabian StylePrecup, Radu, Andrei Stan, and Wei-Shih Du. 2025. "Control of Semilinear Differential Equations with Moving Singularities" Fractal and Fractional 9, no. 4: 198. https://doi.org/10.3390/fractalfract9040198
APA StylePrecup, R., Stan, A., & Du, W.-S. (2025). Control of Semilinear Differential Equations with Moving Singularities. Fractal and Fractional, 9(4), 198. https://doi.org/10.3390/fractalfract9040198