1. Introduction
Discrete fractional maps have recently received attention in various fields of science and engineering [
1]. Fractional maps find applications in diverse fields, starting from informatics (information security [
2], encryption [
3], and image processing [
4]) and finishing with engineering [
5] and medicine [
6].
The stabilization and control of discrete fractional maps remain challenging and significant. Unlike their integer-order counterparts, discrete fractional maps exhibit unique properties such as non-locality and memory effects. The state of such maps is determined not only by local values but also by a substantial portion—or, in some cases, the entirety—of past states [
7].
Chaos and its control in discrete fractional maps are explored in [
8,
9]. The stability of fractional logistic maps and their lattices is investigated in [
10,
11]. The dynamics and control of fractional Ikeda map are studied in [
12], while the stability and control of a fractional system with delays are investigated in [
13]. A feedback control scheme for the fractional difference logistic map based on permutation entropy and fuzzy logic is constructed in [
14]. A backstepping method for the control of fractional single-input single-output systems is constructed in [
15]. Containment control is successfully applied to discrete-time fractional-order multi-agent systems with a time delay in [
16]. Impulse control techniques applicable to chaotic fractional systems are presented in [
17,
18].
One of the most important topics in chaos control of nonlinear systems is the stabilization of unstable periodic orbits [
19]. Numerous different techniques and approaches have been developed for the stabilization of unstable periodic orbits in the last few decades [
20,
21].
However, fractional-order models (continuous and discrete) do not exhibit periodic orbits [
22]. Nevertheless, some trajectories of discrete fractional maps may exhibit asymptotic periodicity after a number of iterations—such trajectories are called asymptotically periodic, and the manifold that such an orbit approaches is called an asymptotic period-
k sink [
23]. The only truly periodic orbit of the fractional difference logistic map is the period-1 orbit [
24]. A more detailed treatment of this classification is given in
Section 2.2.
Finite-time stabilization of the unstable period-1 orbit of the fractional difference logistic map was introduced in [
25]. The approach proposed in [
25] relies on an impulsive perturbation applied at a specific time step. This stabilization method is less invasive than feedback control, as it preserves the original model of the fractional difference logistic map and requires only a small instantaneous perturbation to achieve finite-time stabilization. The primary objective of this paper is to eliminate transient oscillations following the control impulse and to propose a continuous adaptive stabilization scheme of the unstable period-1 orbit of the fractional difference logistic map.
The main motivation of this objective is to address a critical practical issue: in many real-world applications, such as electrical circuits, even short transient oscillations can lead to significant damage. We aim to develop a control strategy that not only achieves finite-time stabilization of the unstable period-1 orbit but also eliminates these undesirable oscillatory transients. Furthermore, the inherent long memory of fractional difference logistic maps causes the trajectory to drift, necessitating an adaptive scheme that continuously tracks and compensates for this drift to maintain system performance within strict tolerance bounds.
This paper is structured as follows. Preliminaries and our motivation are given in
Section 2. The control scheme without oscillatory transients in introduced in
Section 3. The drift of the period-1 orbit is discussed in
Section 3.3; the adaptive control scheme capable of tracking the drifting coordinate of the unstable period-1 orbit is presented in
Section 3.4. Finally, concluding remarks are given in
Section 4.
3. The Control Scheme Without Oscillatory Transients
3.1. The Feasibility of the Proposed Approach
The original control scheme depicted in
Figure 1 is designed to find the deepest trench in the H-rank pattern, thus achieving the longest finite-time stabilization of the unstable period-1 orbit [
25]. However, the H-rank pattern in
Figure 1b reveals several trenches, which are further explored in
Figure 2. Note that all computations in
Figure 2 are performed using the same set of parameters as in
Figure 1, except for the coordinate
, which is set to the middle of different trenches in the the H-rank pattern (rather than exclusively choosing the one leading to the longest finite state stabilization of the unstable orbit). Furthermore, note that the H-rank pattern is now placed horizontally (
Figure 2).
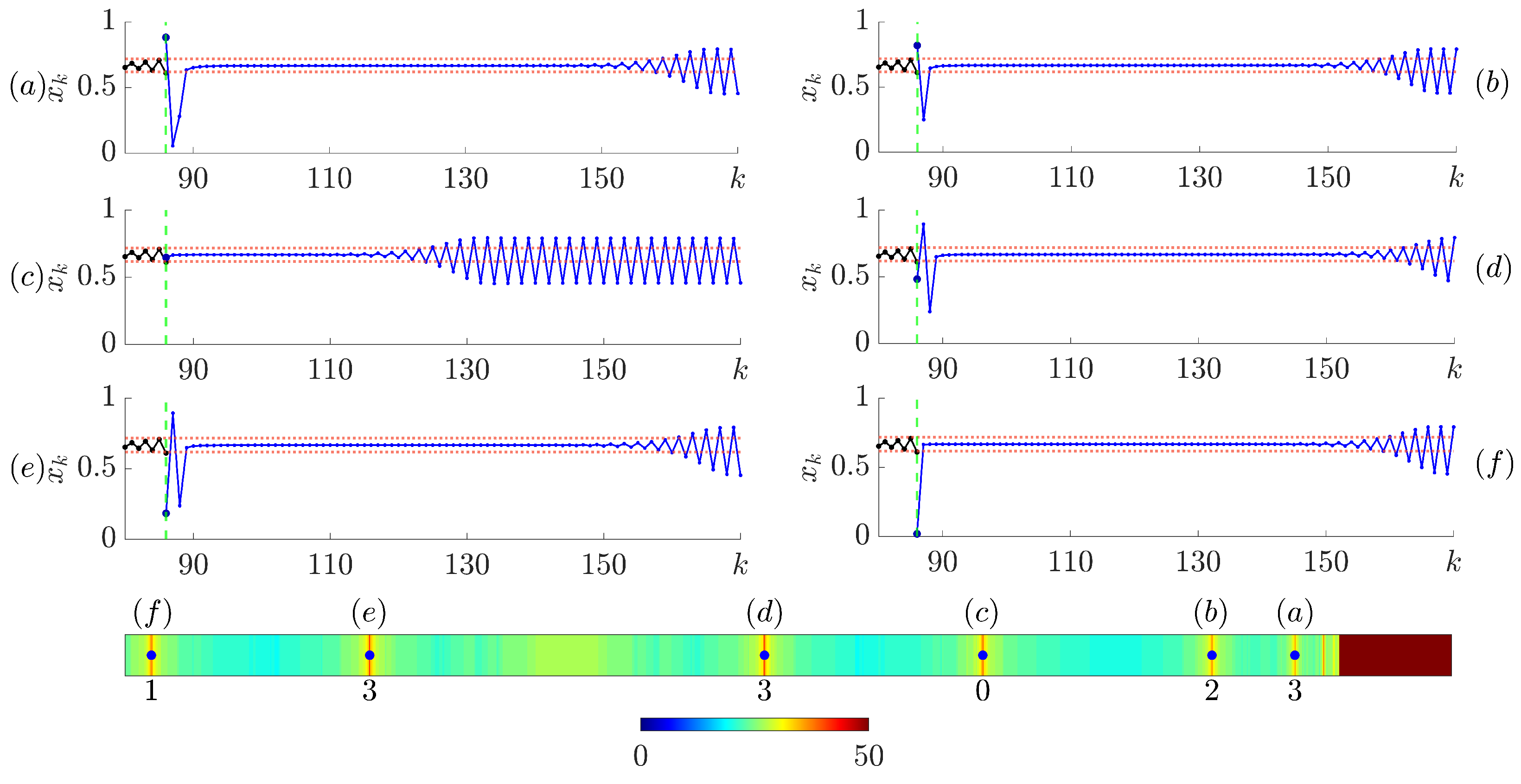
The trenches in the H-rank pattern are enumerated from (a) to (f) (
Figure 2). The transient processes following the control impulse are visualized in six corresponding sub-panels (a to f). Note that the finite-time stabilization of the unstable period-1 orbit is achieved in all six cases. However, the key differences lie in the duration and shape of the brief oscillatory transient behavior immediately following the control impulse.
The numbers below each of the trenches in the pattern of H-ranks in
Figure 2 denote the number of time steps until the transient trajectory exceeds the tolerance corridor immediately following the control impulse. Notably, the number of steps during which the trajectory remains inside the tolerance corridor after the control impulse and after the short oscillatory transient is different. The trajectory remains inside the tolerance corridor for 70 steps in panel (a), 71 steps in panel (b), 38 steps in panel (c), 74 steps in panel (d), 71 steps in panel (e) and 72 steps in panel (f). Note that panel (d) is the exact copy of
Figure 1.
Interestingly, the transient process depicted in
Figure 2c does not exhibit the violent oscillatory transient typically observed immediately following the control impulse, despite the finite-time stabilization of the period-1 orbit being significantly shorter than the optimal situation in
Figure 2d. Moreover, it is important to emphasize that the control impulse does not place the trajectory directly onto the unstable period-1 orbit. In other words, the naive control method continues to be ineffective, as previously noted in [
25]).
This fact is illustrated in
Figure 3. This figure replicates the finite-time stabilization of the unstable period-1 orbit depicted in
Figure 2c. The trajectory of the system until step
is plotted in black. The trajectory after the control impulse is plotted in blue; the coordinate after the control impulse is also marked by a blue dot in the H-rank pattern in
Figure 3. In the naive control scheme (as defined in [
25]) it is implied that the coordinate after the control impulse is set to the unstable period-1 orbit. The trajectory resulting from the naive control scheme is plotted in red; the coordinate after the control impulse is also marked by a red dot on the H-rank pattern in
Figure 3.
3.2. Continuous Stabilization of the Unstable Period-1 Orbit
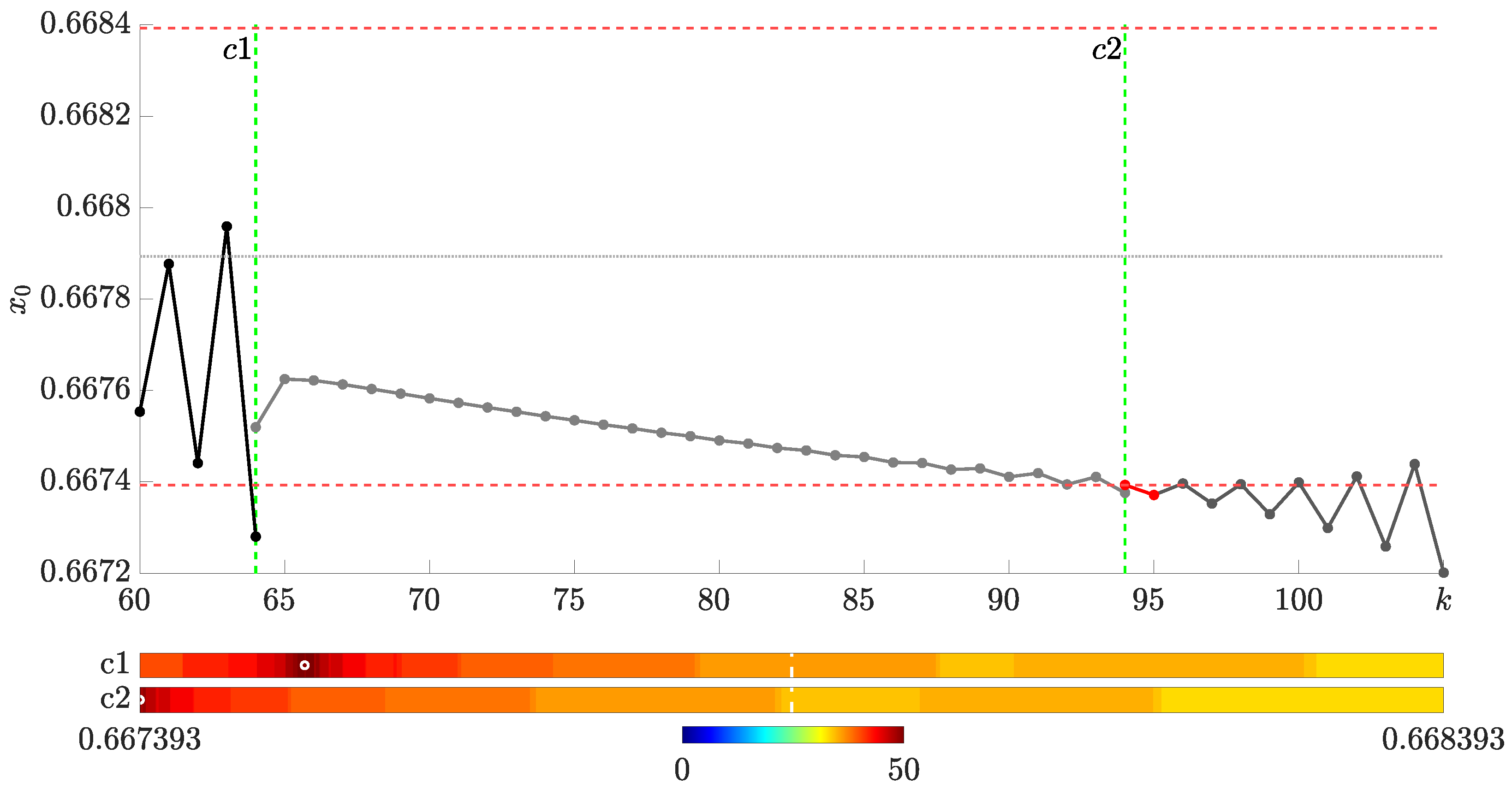
Having established that it is possible to avoid short transient oscillations right after the control impulse, it is important to understand whether the repetitive application of such control impulses can continuously stabilize the system inside the tolerance corridor around the unstable period-1 orbit.
Let us continue with the stabilization scheme depicted in
Figure 2c (the width of the tolerance corridor is set to
). The first control impulse is executed at
when the trajectory violates the boundaries of the tolerance corridor. This instance is marked by
in
Figure 4 (both in the time plot and the zoomed-in part of the H-rank pattern).
However, instead of waiting for the transient trajectory to converge to the period-2 regime after the first control impulse, the control scheme is reapplied immediately when the trajectory breaches the boundaries of the tolerance corridor for the second time. In particular, the H-rank pattern after the second control impulse differs slightly from the pattern after the first control impulse. This discrepancy arises because the subsequent evolution of the system is predetermined by all previous states (including the first control impulse) because of the long memory horizon of the fractional map.
Only the first two control impulses
and
are visualized on the H-rank pattern. However, the red dots denoting the coordinates after each control impulse are depicted throughout the time plot in
Figure 4 (every second transient trajectory is shown in gray for clarity).
Similar calculations are performed using an identical computational setup, except with a narrower tolerance corridor (
;
Figure 5). The continuous stabilization strategy is effective, although it is noticeable that the period-1 orbit is not completely stationary, especially at the beginning of the continuous stabilization process (
Figure 5).
However, further reducing the width of the tolerance corridor to
interrupts the continuous stabilization process (
Figure 6). The first stabilization control impulse
remains effective, providing finite-time stabilization of the transient process. However, the stabilized trajectory gradually drifts downward (
Figure 6). While this drift is generally small, it eventually exceeds the border of the tolerance corridor, which is also narrow). In particular, the trench in the H-rank pattern for the control impulse
is no longer located inside the designated tolerance corridor (
Figure 6), and the continuous stabilization of the unstable period-1 orbit becomes impossible.
3.3. The Drift of the Period-1 Orbit
It has already been reported in [
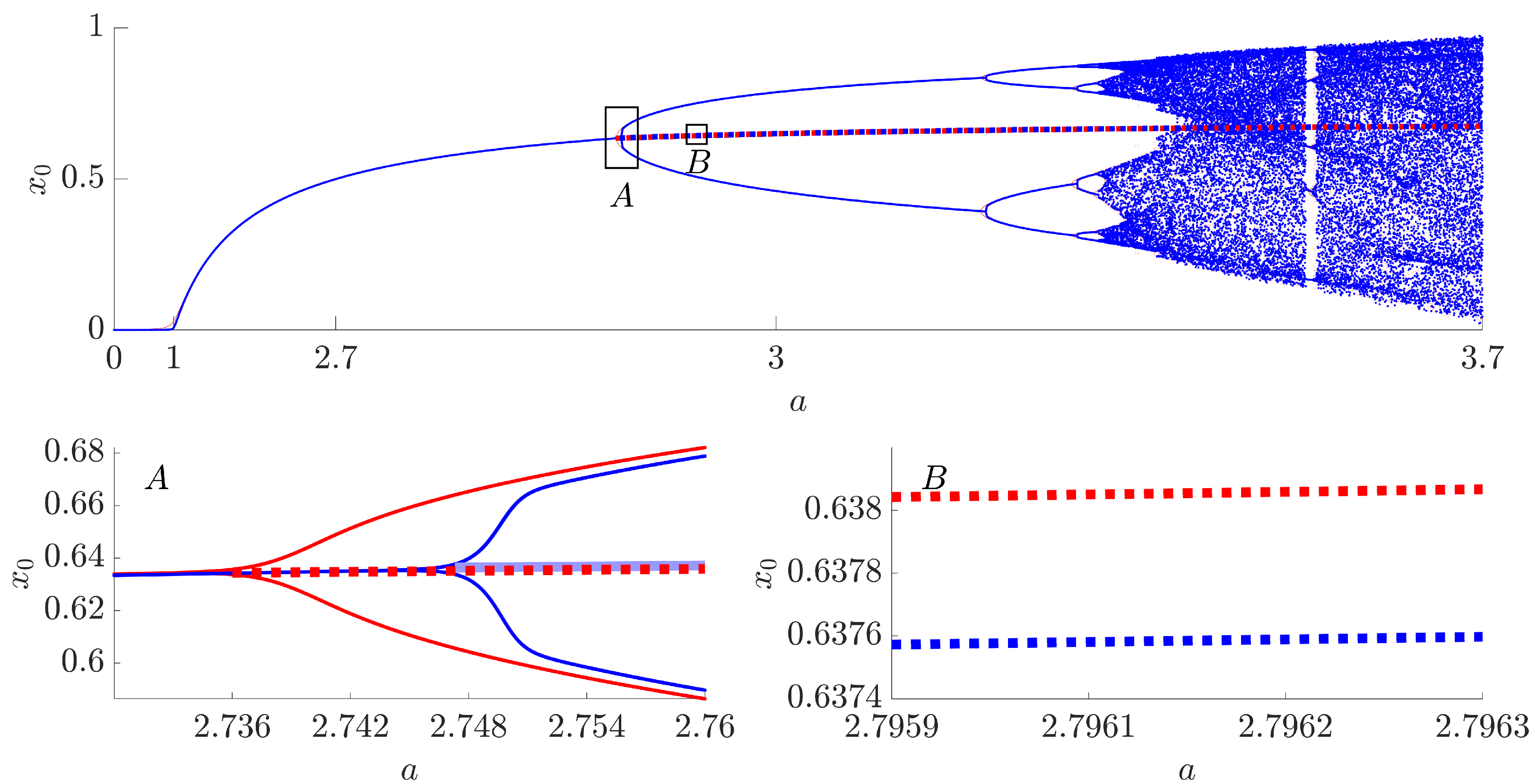
30] that the bifurcation diagram of the fractional difference logistic map varies with different initial conditions. While these differences are small, they are still interpretable (panel (A),
Figure 7). The red bifurcation diagram is constructed by setting the initial condition
to
; the blue bifurcation diagram is constructed by setting
to
. The resulting bifurcation diagram in
Figure 7 predominantly appears blue, as the blue dots largely overlap with the red ones. However, panel (A) reveals small but substantial differences in and around the first period doubling bifurcation.
Note that in constructing the bifurcation diagram given in
Figure 7, a total of 10,000 iterations were skipped in order to make the map move past transient processes. This was done for both
(red line) and
(blue line). Due to this, even though the fractional difference logistic map does not posses periodic orbits (as discussed in
Section 2.2), skipping the transient processes does allow to depict periodic regimes on the bifurcation diagram.
This effect can be explained by the long memory horizon of the fractional difference logistic map. Interestingly, there is a noticeable relationship between the initial condition
and the exact location of the first period-doubling bifurcation (
Figure 8).
However, this effect has another implication, which is illustrated in panel (B) of
Figure 7. Starting earlier, the red period-doubling bifurcation leads to the unstable period-1 orbit that is positioned below the blue period-1 orbit (panel (B)). While the difference may initially appear negligible, it becomes significant when the width of the tolerance corridor
becomes sufficiently small.
Moreover, the results depicted in
Figure 7 and
Figure 8 are produced by only changing the initial condition
. The situation becomes considerably more complex when repetitive control impulses are employed to stabilize the unstable trajectory within the tolerance corridor. The long memory horizon of the fractional difference logistic map implies that the system retains all perturbations from the initial condition to the current moment. As a result, stabilizing unstable orbits or regimes within a narrow tolerance corridor requires a technique that could automatically track the drift of the unstable period-1 orbit, even if that drift is substantially small.
3.4. Continuous Stabilization of the Unstable Period-1 Orbit in Narrow Tolerance Corridors
As mentioned in the previous section, a small drift of the unstable period-1 orbit can compromise the proposed stabilization technique when the width of the tolerance corridor is sufficiently small. Since all previous time steps (including the control impulses) have an impact on the future evolution of the system, it is necessary to create a technique capable of automatically self-adjusting to dynamically changing conditions.
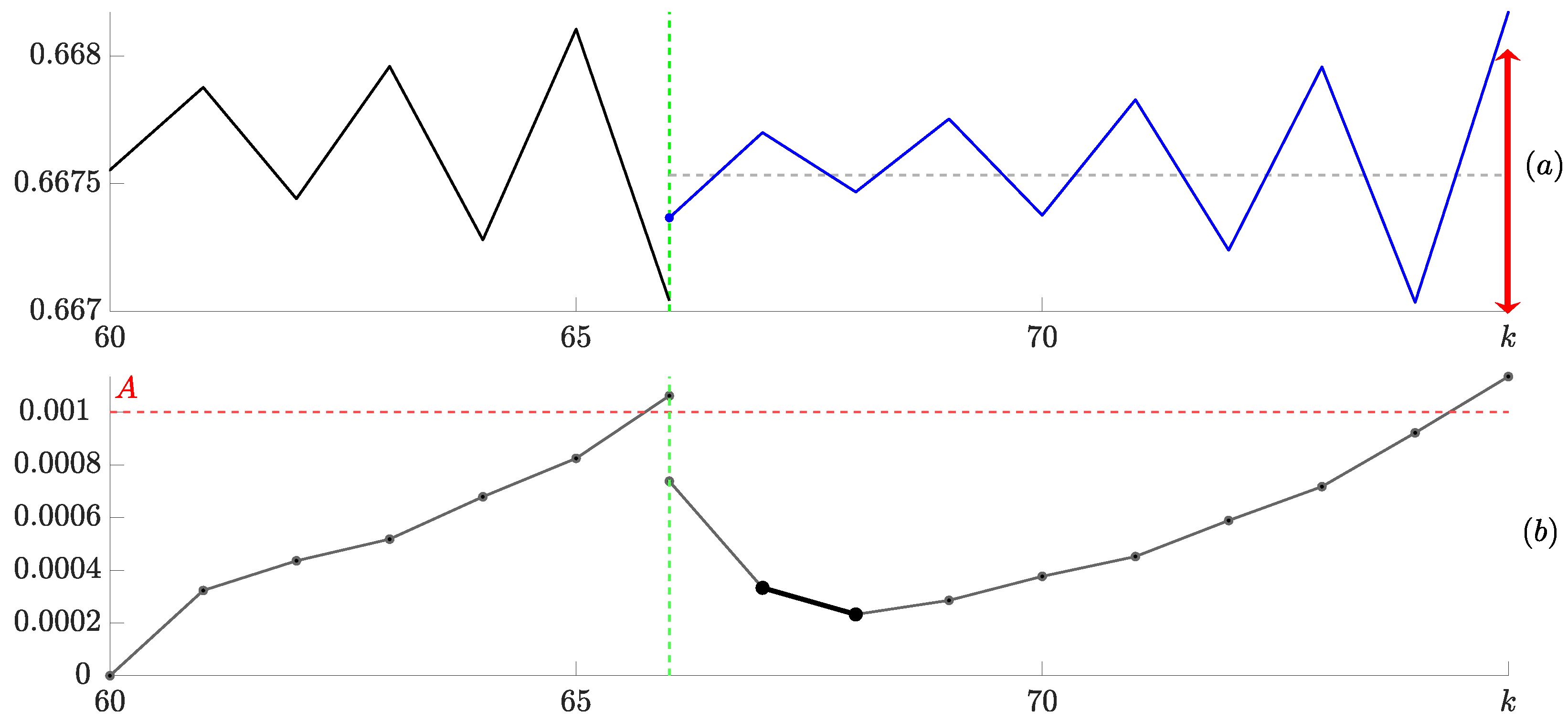
The main idea of such a technique is illustrated in
Figure 9. Instead of setting a static tolerance corridor, we introduce the threshold
A for the absolute difference of the two adjacent time steps (panel (b),
Figure 9). The absolute differences exceed the threshold
A at
, and the control impulse places the system coordinate in the middle of the trench residing in the H-rank pattern (which is omitted in
Figure 9). As the blue trajectory evolves, two consecutive steps, where the absolute differences values are the smallest, are identified (marked by the bold line in panel (b),
Figure 9). Then, the drifted location of the unstable period-1 orbit is set to
(denoted as the blue dashed horizontal line in panel (a),
Figure 9). Then, the observation window for the pattern of H-ranks (which is used at the moment when the absolute differences of adjacent points of the blue trajectory exceeds the threshold
A) is set to
(denoted at the red vertical arrow in panel (a)
Figure 9).
This approach guarantees that the finite stabilization technique is capable of tracking the drifting coordinate of the unstable period-1 orbit. The idea of selecting is straightforward: one must wait for small transient oscillations to subside immediately after the control impulse, but act before the onset of oscillations that signal the start of asymptotic convergence to the stable period-2 regime.
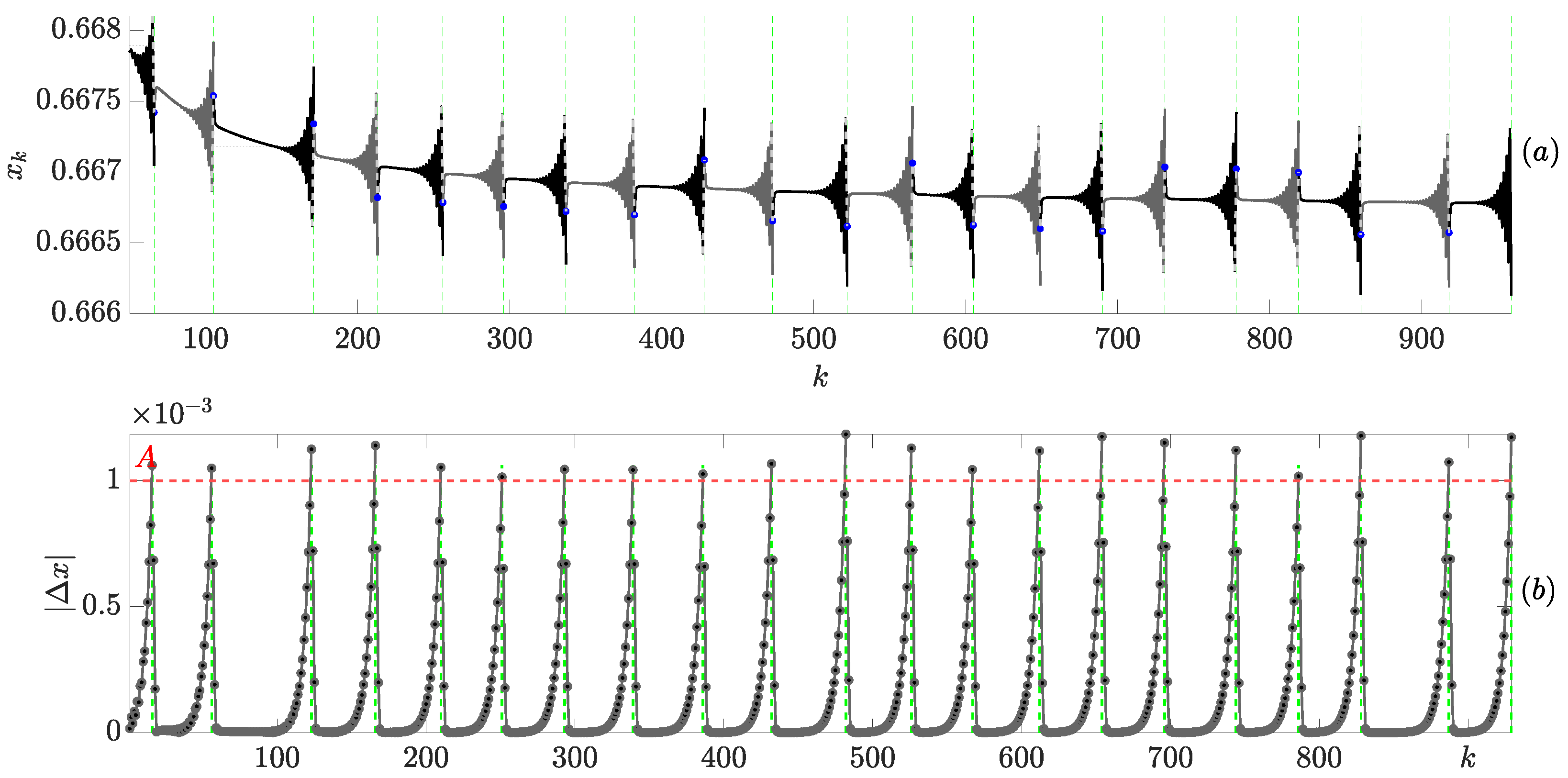
The continuous adaptive stabilization scheme is illustrated in
Figure 10 and
Figure 11. In this approach, 20 control impulses are applied at specific moments to maintain the trajectory of the fractional difference logistic map within a narrow tolerance corridor around the drifting unstable period-1 orbit (
Figure 10). As previously explained, the adaptive scheme applies impulses not when the trajectory exceeds the boundaries of the tolerance corridor, but when the absolute difference
of the adjacent values surpasses the threshold
A (the dashed red line in
Figure 11b). This control method can indefinitely maintain the trajectory around the drifting unstable period-1 orbit.
4. Concluding Remarks
Finite-time stabilization of the unstable period-1 orbit of the fractional difference logistic map by using a single control impulse is a problem that can be characterized by its misleading apparent simplicity. Because the memory horizon of fractional difference maps extends to the initial condition, controlling the evolution of this fractional system by applying a single control impulse is completely unprecedented.
However, it appears that such finite-time stabilization of the unstable period-1 orbit of the fractional difference logistic map is possible (it has already been reported in [
25]). This paper makes a twofold contribution to the state of the art in the dynamics of discrete fractional systems.
Firstly, this paper introduces a finite-time stabilization technique for the unstable period-1 orbit that circumvents violent transient oscillations immediately following the control impulse, which inevitably occur in the control algorithm presented in [
25]).
Secondly, this paper presents an adaptive technique capable of tracking the drifting coordinate of the unstable period-1 orbit as the width of the tolerance corridor becomes exceedingly small. This technique facilitates continuous and indefinite stabilization of the unstable period-1 orbit of discrete fractional maps.
In contrast to earlier methods that directly place the system on the unstable period-1 orbit, resulting in pronounced oscillatory transients, our approach selects control impulses based on an analysis of the H-rank pattern to significantly mitigate these transients. Furthermore, by incorporating an adaptive strategy that tracks the drift of the period-1 orbit, our method continuously compensates for deviations even in very narrow tolerance corridors. This improvement not only enhances the smoothness of the stabilization process, but also makes the technique more robust and practical for applications where transient oscillations can be detrimental.
As already mentioned in the Introduction, many discrete and continuous systems can be stabilized by using continuous feedback loops. The design of a stabilization technique for a fractional difference system without a feedback loop is the main objective of this paper. A natural choice to test this stabilization technique is to use the fractional counterpart of the paradigmatic logistic map. The ability to cope with the fractional difference logistic map opens doors to the stabilization of the whole class of other fractional difference maps (the fractional difference standard map would probably be the first candidate). Clearly, the use of the proposed stabilization method for other fractional difference maps is the next objective of future research.
It should be noted that there exist different versions of fractional logistic maps (a typical version of the fractional logistic map is investigated in [
31]). However, the fractional difference logistic map is reduced to the classical logistic map when the fractional order
tends to 1 (which is not the case with [
31]). Therefore, this is a natural choice to explore a fractional model which is a natural extension of its non-fractional counterpart.
It is widely accepted that stable and unstable period-k orbits of the fractional difference logistic map do not exist when . The exploration of techniques for finite-time stabilization of higher-order unstable periodic regimes (rather than orbits) of discrete fractional maps remains a challenging objective for future research.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}