1. Introduction
Tracking and rejecting periodic signals are common challenges in many control applications. Repetitive control (RC) is an effective learning control strategy for tracking and/or compensating a periodic signal. RC outperforms classical control schemes, such as proportional-integral-derivative (PID), because RC can learn repetitive signal values and then use them as control input [
1]. Recently, RC has become increasingly popular and has been applied to a variety of applications, including optical-stabilized systems [
2], piezo-actuated nanoscanners [
3], mechanical ventilation systems [
4], substrate carrier systems [
5], and robotic leg prostheses [
6]. Additionally, RC has gained popularity in active vibration damping control, where it is effectively used to suppress periodic disturbances, as demonstrated in [
7,
8,
9].
Inou et al. [
10] first introduced a continuous-time RC model based on an internal model principle of Wonham and Francis [
11]. According to the internal model principle, the periodic signal model must be incorporated into the closed-loop system for error-free tracking of the periodic signal. The continuous-time RC model in [
10] was represented by an internal model
, where
is a period of trajectory
. The continuous-time internal model
is marginally stable and exhibits an infinite dimensional structure as the model has infinite poles located at an imaginary axis:
, where
. Due to marginally stable poles and infinite dimension structure, the continuous-time model
is sensitive to high-frequency disturbances and model uncertainties. Additionally, the internal model can only be used for a properly stable plant with a relative degree of zero. A strict proper plant, on the other hand, is modeled in many engineering situations [
12]. In addition, the internal model is limited to a properly stable plant with a relative degree of zero, while many engineering applications are modeled as strictly proper plants. In order to avoid an infinite-dimensional structure, a discrete-time internal model-based RC was introduced in [
13] and formulated as
, where
is an integer number of samples per trajectory period and
T is a sampling period. The discrete-time RC possesses a finite-dimensional structure due to the fact that its poles are finite and evenly spaced and located at a unit circle. For repetitive signals with the frequency
(where
), this discrete model generates a null tracking error. This means that the tracking is limited to the Nyquist components of the periodic signal, encompassing only the fundamental frequency and its harmonics
.
However, the tracking performance and stability of a discrete-time RC system depend on the two following assumptions: (1) the trajectory period
is precisely known, which gives an integer delay length,
; (2) an accurate model of the plant is also known. The first common assumption in the design of discrete-time RC is that the trajectory period () is known and fixed. In practice, however, the trajectory and sampling periods are subject to variation, which can change the delay length () from an integer to a fractional value. Rounding the delay length to the nearest integer value is the simplest method for implementing fractional delay length. However, the actual reference and the internal model will experience a frequency mismatch due to this solution. As a result, the tracking accuracy of the system is compromised. The second assumption implies that the stability of the RC system relies on the known plant model. This is due to the fact that RC is a model-based learning control scheme requiring an accurate model of the plant, especially one needed to design a compensator. A compensator is part of RC besides an internal model, which is used to compensate plant model dynamics and stabilize the closed-loop RC system. Hence, the tracking and robust performance of a standalone RC system is generally susceptible to the trajectory’s period variation and plant model uncertainties.
Several studies have focused on improving the performance of RCs when subjected to period variation [
14,
15,
16,
17,
18,
19]. The adaptive-based RC approach is demonstrated in the works of [
14,
15,
16] since the proposed scheme operates by adapting the sampling period
T in order to preserve the integer value
. The adaptive-based RC solution gives rise to system complexity and implementation due to the requirement to adjust the sampling period. Moreover, the adjustment in the sampling period will also change the dynamics of the discrete-time plant model. Other than adaptive-based RC, higher-order-based RC found in [
17,
18,
19] was also presented to enhance the tracking performance of the systems under period variation. Instead of using one-period delay,
, such as with general RC, higher-order-based RC employs weighting multiple delays (
) in constructing the internal model. Here,
are the weights, and
m is the highest order of RC. The higher-order-based RC aims to extend the high gains of the internal model to the neighboring region around the nominal targeted frequency (
). Thus, higher-order-based RC can improve the trajectory-tracking performance at the neighboring frequencies, e.g.,
, where
represents a minor frequency shift. However, due to multiple delays
, the higher-order-based solution requires large memories and converges slower compared to the general RC.
In contrast to adaptive-based RC, which seeks to maintain the integer value
, and higher-order-based RC, which extends the internal model’s high gains to the neighboring region of the targeted frequency, we implement fractional internal model-based RC in this study. The fractional internal model-based RC is later referred to as fractional delay-RC (FD-RC), emphasizing that in situations involving period variation, the delay length,
, constructing the internal model does not need to be an integer. Here, the fractional time delay is also rooted in fractional calculus, which has been extensively studied and widely used in controller design and dynamics modeling in various applications, as evidenced in [
20,
21,
22,
23,
24,
25]. In [
20], the Riemann-Liouville definition of fractional derivatives for the purpose of recreating the spatial structure of the fractional Schrödinger equation for electrical screening potentials was investigated. An explicit solution formula for fractional delay difference systems and a discrete delayed Mittag-Leffler matrix function were derived in [
21]. Practical applications of fractional calculus for synthesizing a fractional-order PID controller to control bifurcation in fractional-order small-world networks were demonstrated in [
22]. Additionally, the work [
23] designed a reduced-order discrete-time fractional-order PID controller. Furthermore, the authors of [
24] developed model-based fractional order controllers for time-delay processes in servo systems, while the authors of [
25] dealt with the design of complex fractional order speed controllers for induction motors. These studies demonstrate the wide range of applications and potential benefits of fractional calculus in enhancing controller performance and dynamics modeling. In contrast to [
20,
21,
22,
23,
24,
25], we concern ourselves with the fractional delay design in discrete time, which is required to construct an accurate internal model of the RC system.
In order to address the second limitation of general RC, an integrated sliding mode controller (SMC) is utilized to ensure robustness in the presence of model uncertainties. SMC is a widely recognized control scheme that operates on the principle of switching control and attempts to steer a sliding function in the direction of a designated sliding surface. A discrete-time SMC has been widely exploited in much of the literature [
26,
27,
28,
29,
30,
31,
32], and here, the discrete-time SMC with a linear switching function will be incorporated into the FD-RC. Numerous research studies have been conducted on the utilization of sliding mode control with a supplementary control scheme, such as repetitive control, as reported in [
33,
34,
35,
36,
37,
38]. In [
33], a repetitive sliding mode controller incorporating an exponential-based bi-power reaching law for three-phase voltage source inverters was introduced. An integral sliding mode control scheme based on repetitive control was developed in [
34] for uncertain repetitive processes with the presence of matched uncertainties, external disturbances, and norm-bounded nonlinearities. A repetitive sliding mode controller with a modified RC was designed in [
35] for uncertain linear systems. An adaptive smooth second-order sliding mode repetitive control method for a class of nonlinear systems with unknown disturbances and uncertainties was proposed [
36]. In [
37], a discrete-time low-order sliding mode repetitive controller was presented for a class of uncertain linear systems affected by band-limited periodic disturbances and parametric uncertainties. Lu et al. [
38] presented an enhanced sliding-mode repetitive learning control scheme using the wavelet transform, which speeds up the learning process.
In contrast to previous studies (references [
33,
34,
35,
36,
37,
38]), the main aim of this study is to address the issue of tracking and/or rejecting disturbances within a particular class of uncertain linear systems that exhibit multiple periodic signals. These systems may exhibit variability in both the reference signal and disturbance signal periods, which results in non-integer discrete-time delay lengths. Therefore, in the context of this study, our aim is to develop a novel control approach known as the fractional delay-based repetitive sliding mode controller (FD-RSMC). The objective of this controller is also to overcome the primary constraints of conventional RC systems by combining fractional delay-based repetitive control (FD-RC) with sliding mode control (SMC), as previously described. Here, FD-RC is applied to keep the delay length fixed to the period of the actual reference or disturbance. Thus, the period disparity between the controller and the actual reference due to period variation can be avoided, as the RC system’s tracking accuracy depends on this condition. The fractional delay term is realizable and straightforward to use because it can be implemented as an independent, stable, and causal IIR filter. The coefficients of the corresponding filter can be obtained by utilizing the Thiran formula [
39,
40], as illustrated in the works in [
41,
42]. In contrast to the internal model examined in this study, which deals with the reference or disturbance model, the research described in [
41,
42] focused on the fractional order design of the RC compensator with the objective of developing a closed-loop RC system stabilizing controller. Next, SMC is systemically incorporated into FD-RC to improve the robustness of the system against parametric uncertainties. Moreover, SMC is also capable of enhancing the transient response of the system, especially during the learning process of the RC part. In this study, a systematic integration between FD-RC and SMC is described, and a stability analysis is performed. Simulation and comparison studies over an integer delay-based repetitive sliding mode controller (ID-RSMC) and standalone RC are provided to show the effectiveness of the proposed design. In order to emphasize the significance of our work, the main contributions are highlighted as follows:
- (1)
A novel and systemic integration is established between FD-RC and SMC with the objective of overcoming the constraints of general RC. The proposed approach subsequently addresses the two primary limitations of conventional RC, namely its vulnerability to fluctuations in tracking or disturbance periods and the uncertainties associated with plant models.
- (2)
Stability analysis of the FD-RSMC system is carried out based on the reaching condition, and it is proved that the evolution of the sliding function decreases and moves toward the sliding surface. Furthermore, every control parameter utilized in the formulation of the proposed control law is proven to be stable and realizable.
- (3)
The implementation of the FD-RC component in the proposed FD-RSMC is feasible due to the substitution of a stable and causal IIR filter for the fractional portion of the RC delay.
The rest of this paper is structured as follows:
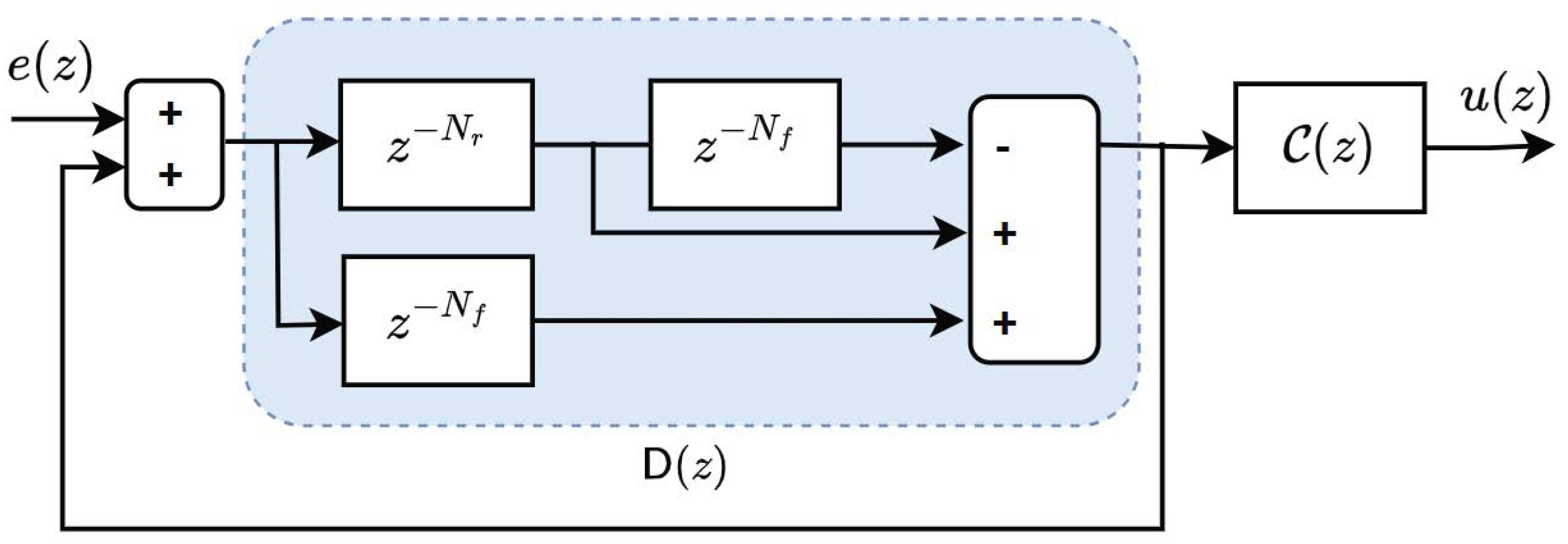
Section 2 describes problem formulation and preliminary, which comprises the class of the system, control objective, assumptions used in the design, and the overview of single and two-period general RCs.
Section 3 illustrates the main results of the FD-RC and FD-RSMC designs and the stability analysis of the FD-RSMC closed-loop system.
Section 4 discusses the simulation and comparison studies, and
Section 5 presents the conclusions of the paper.

 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}