

Abundant Closed-Form Soliton Solutions to the Fractional Stochastic Kraenkel–Manna–Merle System with Bifurcation, Chaotic, Sensitivity, and Modulation Instability Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Standard Process of the Methodology and Amenities
2.1. Brownian Motion
- ;
- is continuous for ;
- is independent for ;
- Anormal distribution is exhibited by with mean as well as variance .
2.2. Fractional Derivative and Its Feature
- ;
- ;
- ;
- ;
- .
2.3. Methodology
3. Application of the Method
4. Diverse Analyses Concerning to the Fractional Equation
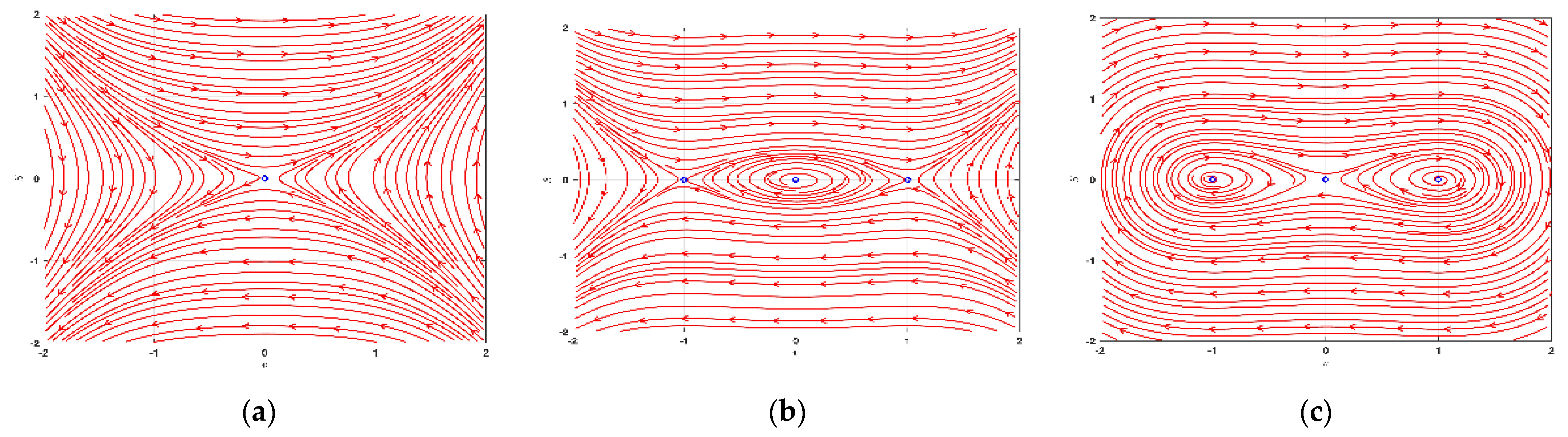
4.1. Bifurcation Analysis
- The equilibrium position represents a saddle point, when ;
- The equilibrium position denotes a center point, when ;
- The equilibrium position signifies a cuspid point, when .
- Instance 1: and .
- Instance 2: and .
- Instance 3: and .
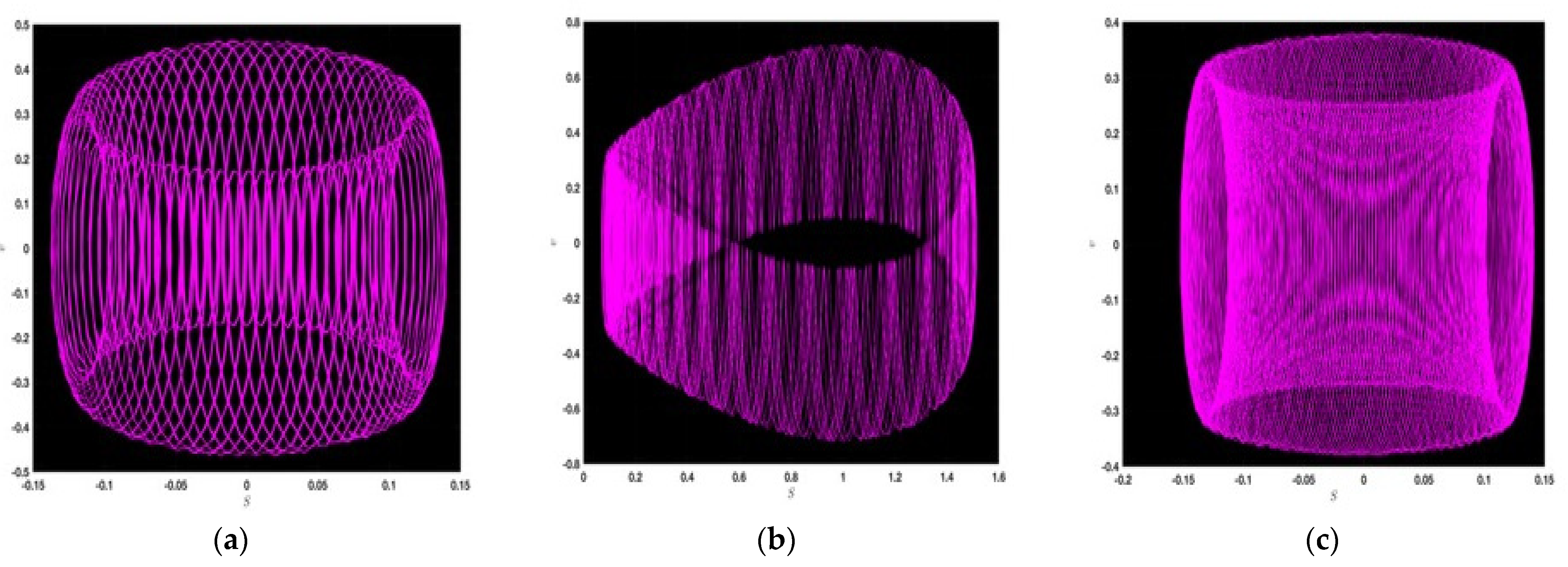
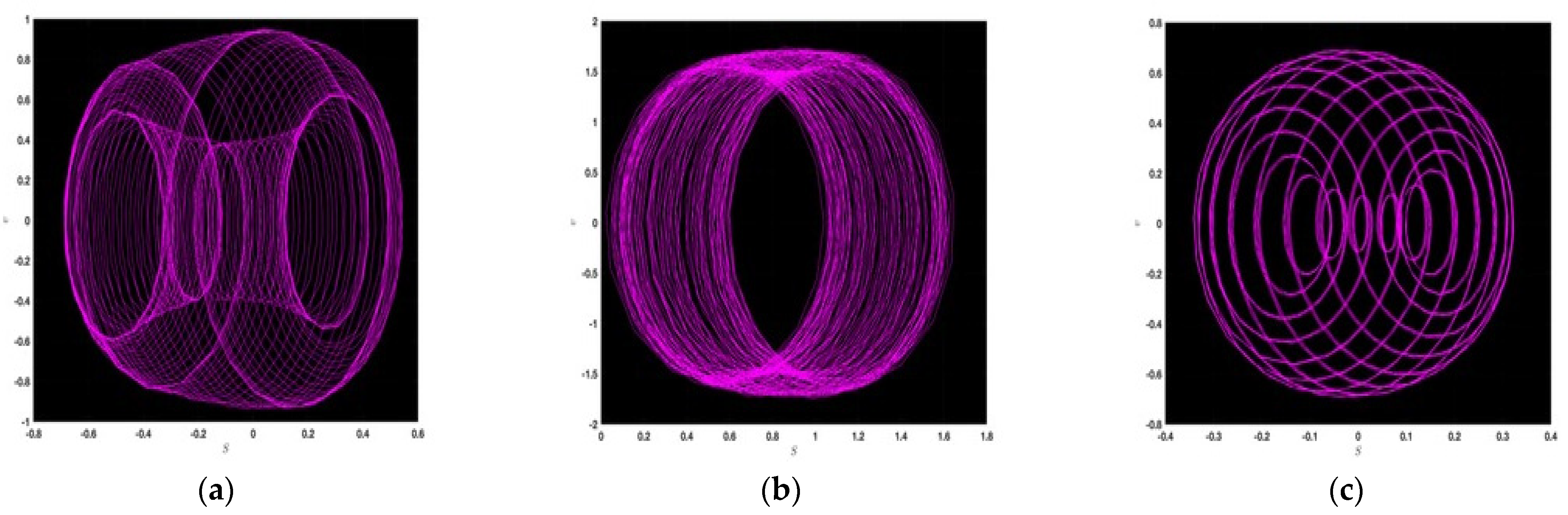
4.2. Chaotic Nature of the Dynamic System
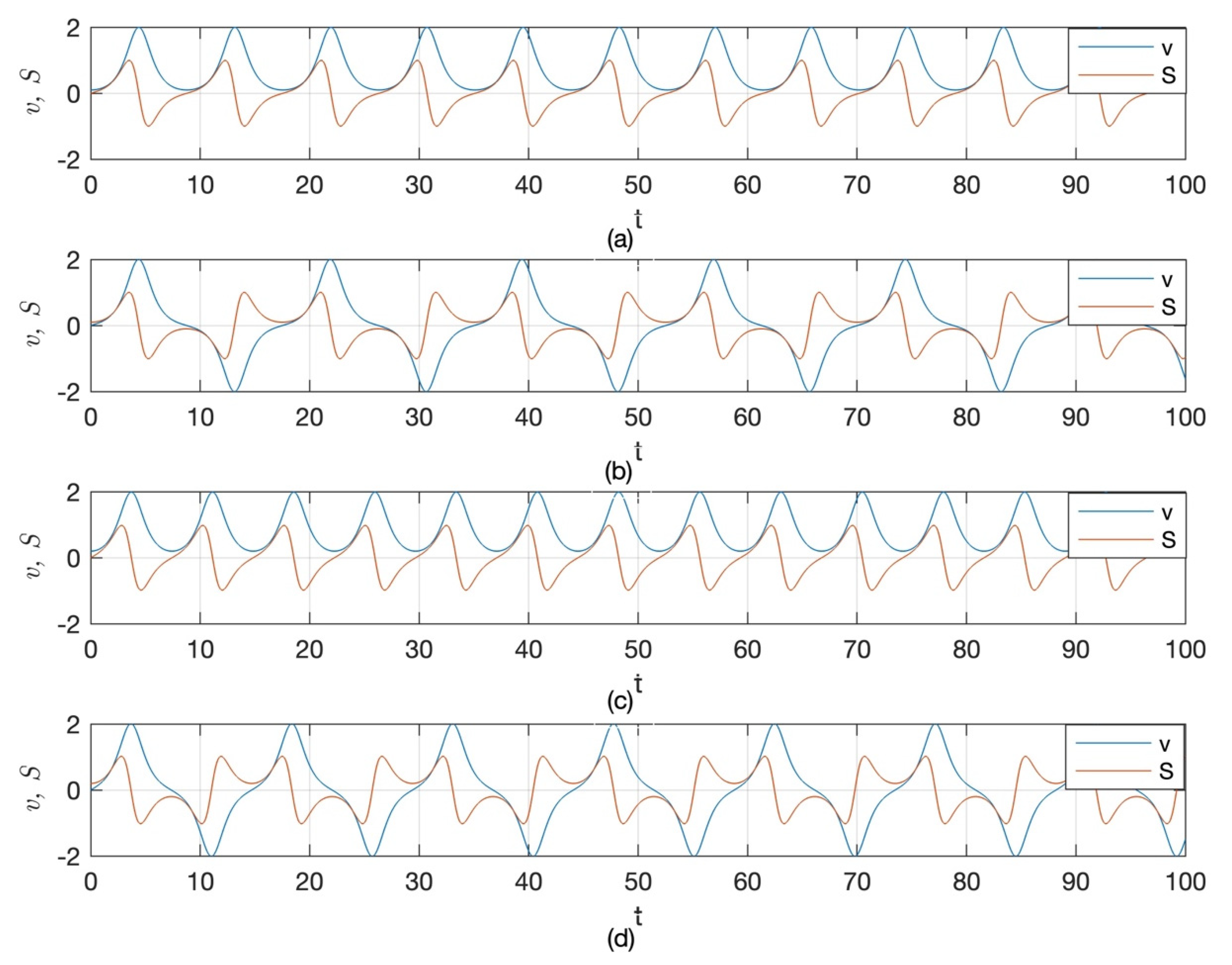
4.3. Sensitivity Analysis of the Dynamic System
4.4. Modulation Instability
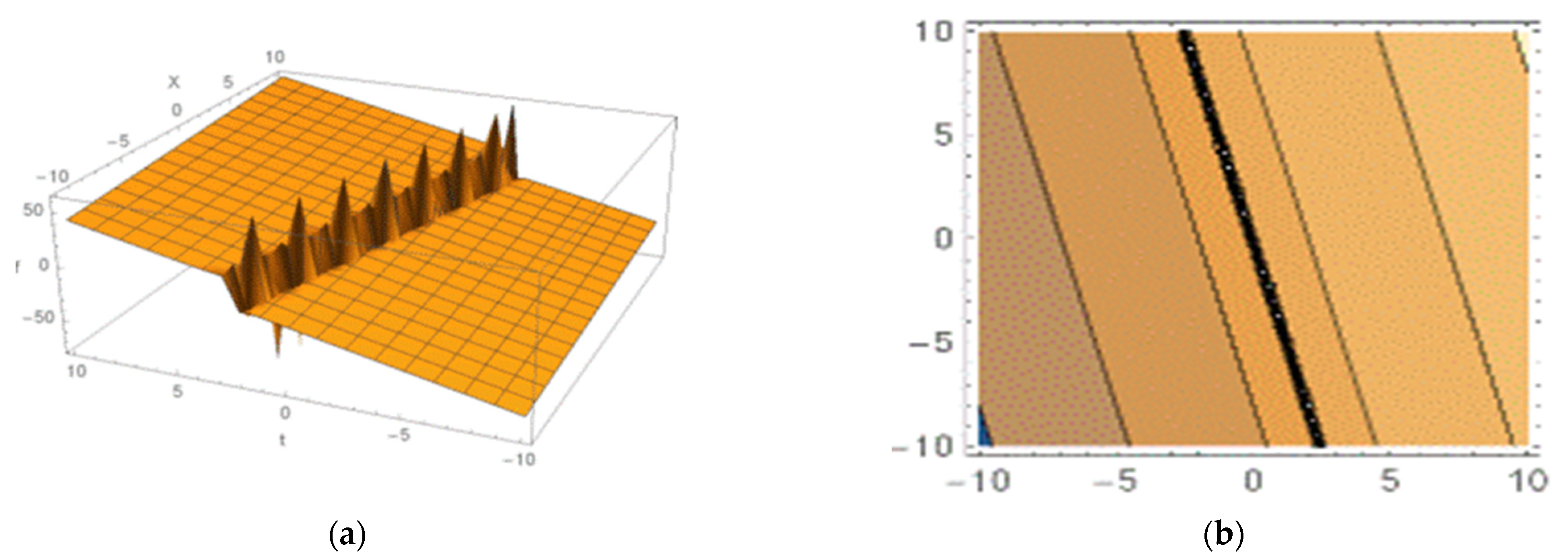
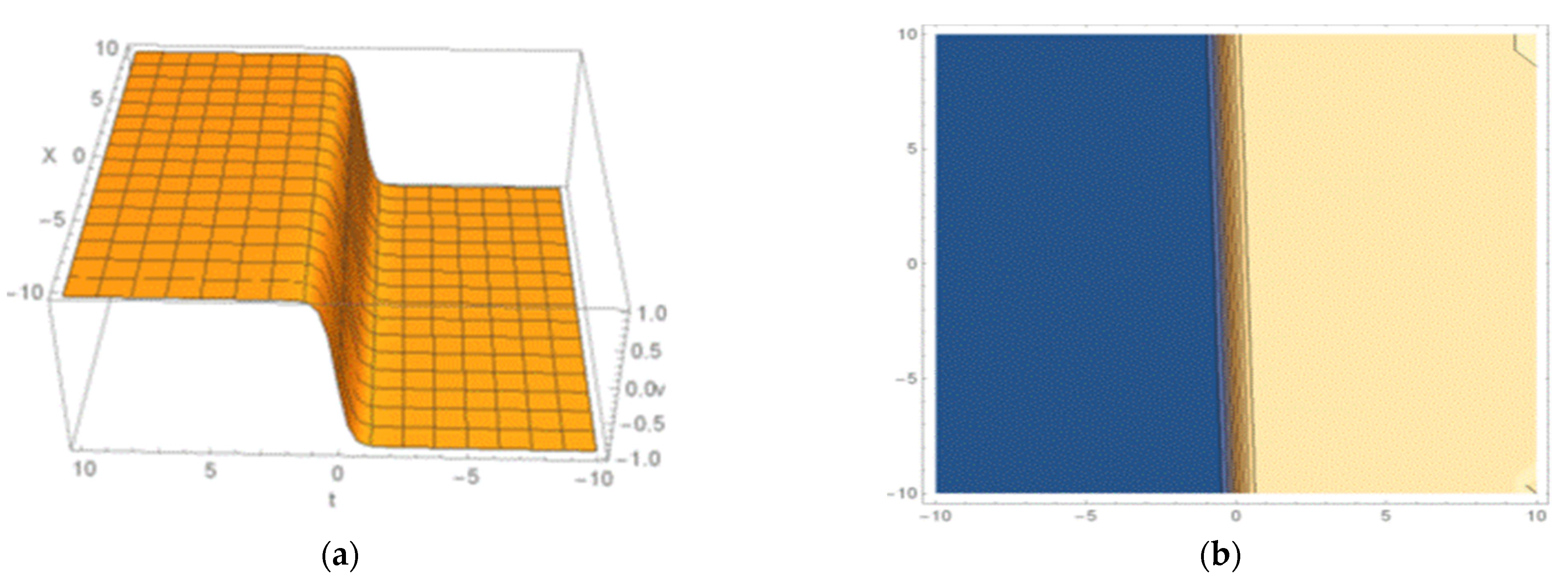
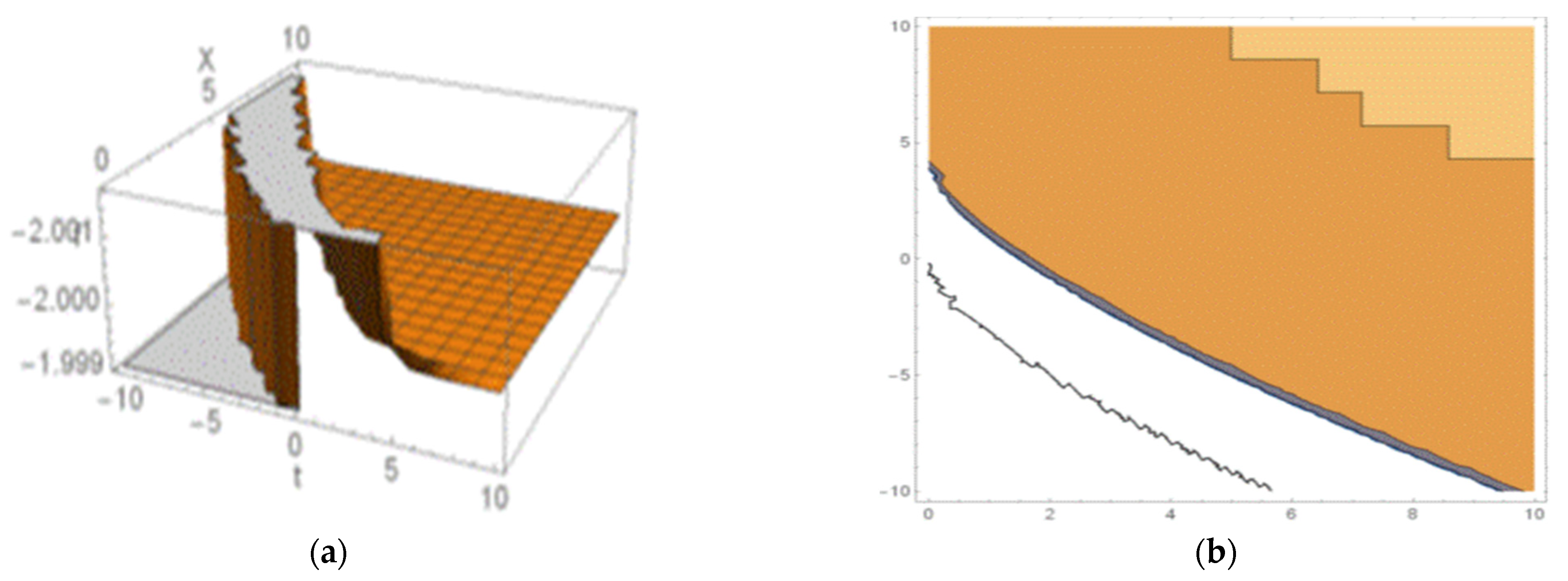
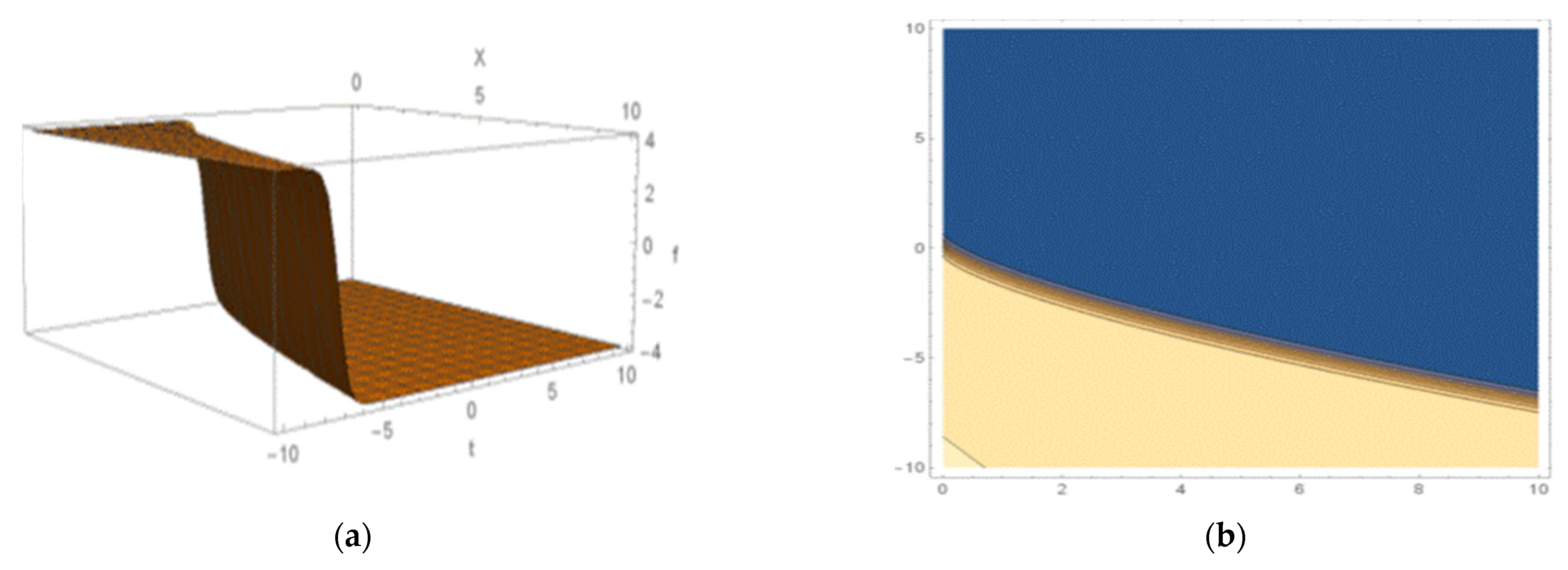
5. Graphical Explanation of Closed-Form Solutions
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Varol, D. Solitary and Periodic Wave Solutions of the Space-Time Fractional Extended Kawahara Equation. Fractal Fract. 2023, 7, 539. [Google Scholar] [CrossRef]
- Gebril, E.; El-Azad, M.S.; Sameeh, M. Chebyshev collocation method for fractional Newell-Whitehead-Segel equation. Alex. Eng. J. 2024, 87, 39–46. [Google Scholar] [CrossRef]
- Guswanto, B.H.; Suroto; Istikaanah, N. Multi-order fractional nonlinear evolution equations system. Partial Differ. Equ. Appl. Math. 2024, 9, 100620. [Google Scholar] [CrossRef]
- Liu, S.; Zhou, Q.; Biswas, A.; Liu, W. Phase-shift controlling of three solitons in dispersion-decreasing fibers. Nonlinear Dyn. 2019, 98, 395–401. [Google Scholar] [CrossRef]
- Ma, W.X. Solitons by means of Hirota bilinear forms. Partial Differ. Equ. Appl. Math. 2022, 5, 100220. [Google Scholar] [CrossRef]
- Ali, K.K.; Yilmazer, R.; Baskonus, H.M.; Bult, H. Modulation instability analysis and analytical solutions to the system of equations for the ion sound and Langmuir waves. Phys. Scr. 2020, 95, 065602. [Google Scholar] [CrossRef]
- Dusunceli, F.; Celik, E.; Askin, M.; Bulut, H. New exact solutions for the doubly dispersive equation using improved Bernoulli sub-equation method. Indian J. Phys. 2021, 95, 309–314. [Google Scholar] [CrossRef]
- Ozkan, E.M. New Exact Solutions of Some Important Nonlinear Fractional Partial Differential Equations with Beta Derivative. Fractal Fract. 2022, 6, 173. [Google Scholar] [CrossRef]
- Aljahdaly, N.H.; Alyoubi, A.F.; Aloufi, R.G. New analytical solutions for two physical applications by the modified / expansion method. AIP Conf. Proc. 2022, 2472, 020001. [Google Scholar]
- Jordanov, I.P. Simple equations method applied to the equations of nonlinear Schrödinger kind. AIP Conf. Proc. 2022, 2459, 030016. [Google Scholar]
- Akram, G.; Sadaf, M.; Khan, M.A.U. Soliton solutions of Lakshmanan-Porsezian-Daniel model using modified auxiliary equation method with parabolic and anti-cubic law of nonlinearities. Opt.-Int. J. Light Electron Opt. 2022, 252, 168372. [Google Scholar] [CrossRef]
- Akram, G.; Zainab, I.; Sadaf, M.; Bucur, A. Solitons, one line rogue wave and breather wave solutions of a new extended KP-equation. Results Phys. 2023, 55, 107147. [Google Scholar] [CrossRef]
- Ali, H.M.S.; Habib, M.A.; Miah, M.M.; Miah, M.M.; Akbar, M.A. Diverse solitary wave solutions of fractional order Hirota-Satsuma coupled KdV system using two expansion methods. Alex. Eng. J. 2023, 66, 1001–1014. [Google Scholar] [CrossRef]
- Iqbal, M.A.; Baleanu, D.; Miah, M.M.; Ali, H.M.S.; Alshehri, H.M.; Osman, M.S. New soliton solutions of the mZK equation and the Gerdjikov-Ivanov equation by employing the double (/, 1/)-expansion method. Results Phys. 2023, 47, 106391. [Google Scholar] [CrossRef]
- Hossain, M.N.; Miah, M.M.; Duraihem, F.Z.; Rehman, S. Stability, modulation instability, and analytical study of the confirmable time fractional Westervelt equation and the Wazwaz Kaur Boussinesq equation. Opt. Quantum Electron. 2024, 56, 948. [Google Scholar] [CrossRef]
- Hossain, M.N.; Miah, M.M.; Ganie, A.H.; Osman, M.; Ma, W.X. Discovering new abundant optical solutions for the resonant nonlinear Schrödinger equation using an analytical technique. Opt. Quantum Electron. 2024, 56, 847. [Google Scholar] [CrossRef]
- Hussain, A.; Kara, A.H.; Zaman, F.D. An invariance analysis of the Vakhnenko-Parkes equation. Chaos Solitons Fractals 2023, 171, 113423. [Google Scholar] [CrossRef]
- Li, S. Nonlinear chirped optical solitons of the perturbation Fokas-Lenells equation in optical fibers. Opt.-Int. J. Light Electron Opt. 2023, 276, 170627. [Google Scholar] [CrossRef]
- Alam, B.E.; Javid, A. Optical dual-waves to a new dual-mode extension of a third order dispersive nonlinear Schrödinger’s equation. Phys. Lett. A 2023, 480, 128954. [Google Scholar] [CrossRef]
- Kudryashov, N.A.; Nifontov, D.R. Some specific optical wave solutions and combined other solitons to the advanced (3+1)-dimensional Schrödinger equation in nonlinear optical fibersy. Chaos Solitons Fractals 2023, 175, 114076. [Google Scholar] [CrossRef]
- Kumar, S.; Hamid, I.; Abdou, M.A. Some specific optical wave solutions and combined other solitons to the advanced (3+1)-dimensional Schrödinger equation in nonlinear optical fibers. Opt. Quantum Electron. 2023, 55, 728. [Google Scholar] [CrossRef]
- Niwas, M.; Kumar, S. New plenteous soliton solutions and other form solutions for a generalized dispersive long-wave system employing two methodological approaches. Opt. Quantum Electron. 2023, 55, 630. [Google Scholar] [CrossRef]
- Singh, S.; Ray, S.S. Newly exploring the Lax pair, bilinear form, bilinear Backlund transformation through binary Bell polynomials, and analytic solutions for the (2+1)-dimensional generalized Hirota-Satsuma-Ito equation. Phys. Fluids 2023, 34, 087134. [Google Scholar] [CrossRef]
- Mohammed, W.W.; El-Morshedy, M.; Cesarano, C.; Al-Askar, F.M. Soliton solutions of fractional stochastic Kraenkel-Manna-Merle equations in ferromagnetic materials. Fractal Fract. 2023, 7, 328. [Google Scholar] [CrossRef]
- Liaqat, M.I.; Khan, A.; Alqudah, M.A.; Abdeljawad, T. Adapted homotopy perturbation method with Shehu transform for solving conformable fractional nonlinear partial differential equations. Fractals 2023, 31, 2340027. [Google Scholar] [CrossRef]
- Du, H.; Yang, X.; Chen, Z. A new method of solving the best approximate solution for a nonlinear fractional equation. Int. J. Comput. Math. 2023, 100, 1702–1718. [Google Scholar] [CrossRef]
- Kumar, S.; Mohan, B. A novel analysis of Cole-Hopf transformations in different dimensions, solitons, and rogue wave for a (2+1)-dimensional shallow water wave equation of ion-acoustic waves in plasmas. Phys. Fluids 2023, 35, 127128. [Google Scholar] [CrossRef]
- Rong, F.; Li, Q.; Shi, B.; Chai, Z. A lattics Boltzmann model based on Cole-Hopf transformation for N-dimensional coupled Burgers’ equations. Comput. Math. Appl. 2023, 134, 101–111. [Google Scholar] [CrossRef]
- Ashraf, R.; Hussain, S.; Ashraf, F.; Akgul, A.; El Din, S.M. The extended Fan’s sub-equation method and its application to nonlinear Schrodinger equation with saturable nonlinearity. Results Phys. 2023, 52, 106755. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, S. Dynamic nature of analytical soliton solutions of the (1+1)-dimensional Mikhailov-Novikov-Wang equation using the unified approach. Int. J. Math. Comput. Eng. 2023, 1, 217–228. [Google Scholar] [CrossRef]
- Mahmood, A.; Abbas, M.; Akram, G.; Sadaf, M.; Riaz, M.B.; Abdeljawad, T. Solitary wave solution of (2+1)-dimensional Chaffee–Infante equation using the modified Khater method. Results Phys. 2023, 48, 106416. [Google Scholar] [CrossRef]
- Yasmin, H.; Alshehry, A.S.; Ganie, A.H.; Shafee, A.; Shah, R. Noise effect on soliton phenomena in fractional stochastic Kraenkel-Manna-Merle system arising in ferromagnetic materials. Sci. Rep. 2024, 14, 1810. [Google Scholar] [CrossRef] [PubMed]
- Youssri, Y.H.; Zaky, M.A.; Hafez, R.M. Romanovski-Jacobi spectral schemes for higher-order differential equations. Appl. Numer. Math. 2024, 198, 148–159. [Google Scholar] [CrossRef]
- Tripathy, A.; Sahoo, S. A novel analytical method for solving (2+1)-dimensional extended Calogero-Bogoyavlenskii-Schiff equation in plasma physics. J. Ocean Eng. Sci. 2021, 6, 405–409. [Google Scholar] [CrossRef]
- Khalid, S.; Ahmad, S.; Ullah, A.; Ahmad, H.; Saifullah, S.; Nofal, T.A. New wave solutions of the (2+1)-dimensional generalized Hirota-Satsuma-Ito equation using a novel expansion method. Results Phys. 2023, 50, 106450. [Google Scholar] [CrossRef]
- Mia, R.; Miah, M.M.; Osman, M.S. A new implementation for finding of analytical solutions in nonlinear PDEs. Heliyon 2023, 9, e15690. [Google Scholar] [CrossRef] [PubMed]
- Khalid, S.; Ullah, A.; Ahmad, S.; Akg, A.; Yusuf, A.; Sulaiman, T.A. Some novel analytic solutions of a new extended (2+1)-dimensional Boussinesq equation using a novel method. J. Ocean. Eng. Sci. 2022, in press. [Google Scholar]
- Iqbal, M.A.; Miah, M.M.; Ali, H.M.S.T.; Shahen, N.H.M.; Deifalla, A. New applications of the fractional derivative to extract abundant soliton solutions of the fractional order PDEs in mathematics physics. Partial Differ. Equ. Appl. Math. 2024, 9, 100597. [Google Scholar] [CrossRef]
- Senol, M.; Akinyemi, L.; Nkansah, H.; Adel, W. New solutions for four novel generalized nonlinear fractional fifth-order equations. J. Ocean Eng. Sci. 2024, 9, 59–65. [Google Scholar]
- Zeid, S.S.; Alipour, M. A collocation method using generalized Laguerre polynomials for solving nonlinear optimal control problems governed by integro-differential equations. J. Comput. Appl. Math. 2024, 436, 115410. [Google Scholar] [CrossRef]
- Prathumwan, D.; Chaiya, I.; Trachoo, K. Three-dimensional simulation of the lumbar spine under lumbar spinal stenosis with different sizes of spinal canal. Partial Differ. Equ. Appl. Math. 2024, 9, 100614. [Google Scholar] [CrossRef]
- Borhan, J.R.M.; Ganie, A.H.; Miah, M.M.; Iqbal, M.A.; Seadawy, A.R.; Mishra, N.K. A highly effective analytical approach to innovate the novel closed form soliton solutions of the Kadomtsev-Petviashivili equations with applications. Opt. Quantum Electron. 2024, 56, 938. [Google Scholar] [CrossRef]
- Chen, J.; Pelinovsky, D.E. Periodic Travelling Waves of the Modified KdV Equation and Rogue Waves on the Periodic Background. J. Nonlinear Sci. 2019, 29, 2797–2843. [Google Scholar] [CrossRef]
- Liu, Y.; Zeng, S. Discontinuous initial value and Whitham modulation for the generalized Gerdjikov-Ivanov equation. Wave Motion 2024, 127, 103276. [Google Scholar] [CrossRef]
- Rezazadeh, H.; Inc, M.; Baleanu, D. New solitary wave solutions for variants of (3+1)-Dimensional Wazwaz-Benjamin-Bona-Mahony equations. Front. Phys. 2020, 8, 332. [Google Scholar] [CrossRef]
- Rasool, T.; Hussain, R.; Al Sharif, M.A.; Mahmoud, W.; Osman, M.S. A variety of optical soliton solutions for the M-truncated Paraxial wave equation using Sardar-subequation technique. Opt. Quantum Electron. 2023, 55, 396. [Google Scholar] [CrossRef]
- Yasin, S.; Khan, A.; Ahmad, S.; Osman, M.S. New exact solutions of (3+1)-dimensional modified KdV-Zakharov-Kuznetsov equation by Sardar-subequation method. Opt. Quantum Electron. 2024, 56, 90. [Google Scholar] [CrossRef]
- Kraenkel, R.A.; Manna, M.A.; Merle, V. Nonlinear short-wave propagation in ferrites. Phys. Rev. E 2000, 61, 976–979. [Google Scholar] [CrossRef]
- Hussain, Z.; Rehman, Z.U.; Abbas, T.; Smida, K.; Le, Q.H.; Abdelmalek, Z.; Tlili, I. Analysis of bifurcation and chaos in the traveling wave solution in optical fibers using the Radhakrishnan–Kundu–Lakshmanan equation. Results Phys. 2023, 55, 107145. [Google Scholar] [CrossRef]
- Biswas, A.; Bagchi, B.K.; Yildirim, Y.; Khan, S.; Asiri, A. Quasimonochromatic dynamical system and optical soliton cooling with triple-power law of self-phase modulation. Phys. Lett. A 2023, 480, 128985. [Google Scholar] [CrossRef]
- Shehzad, K.; Seadawy, A.R.; Wang, J.; Arshad, M. Multi peak solitons and breather types wave solutions of unstable NLSEs with stability and applications in optics. Opt. Quantum Electron. 2023, 55, 7. [Google Scholar] [CrossRef]
- Yang, Z. Voltammetry for quantitative determination of trace mercury ions in water via acetylene black modified carbon paste electrode. Alex. Eng. J. 2024, 87, 107–113. [Google Scholar] [CrossRef]
- Li, Z.; Hu, H. Chaotic pattern, bifurcation, sensitivity and traveling wave solution of the coupled Kundu-Mukherjee-Naskar equation. Results Phys. 2023, 48, 106441. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borhan, J.R.M.; Miah, M.M.; Alsharif, F.; Kanan, M. Abundant Closed-Form Soliton Solutions to the Fractional Stochastic Kraenkel–Manna–Merle System with Bifurcation, Chaotic, Sensitivity, and Modulation Instability Analysis. Fractal Fract. 2024, 8, 327. https://doi.org/10.3390/fractalfract8060327
Borhan JRM, Miah MM, Alsharif F, Kanan M. Abundant Closed-Form Soliton Solutions to the Fractional Stochastic Kraenkel–Manna–Merle System with Bifurcation, Chaotic, Sensitivity, and Modulation Instability Analysis. Fractal and Fractional. 2024; 8(6):327. https://doi.org/10.3390/fractalfract8060327
Chicago/Turabian StyleBorhan, J. R. M., M. Mamun Miah, Faisal Alsharif, and Mohammad Kanan. 2024. "Abundant Closed-Form Soliton Solutions to the Fractional Stochastic Kraenkel–Manna–Merle System with Bifurcation, Chaotic, Sensitivity, and Modulation Instability Analysis" Fractal and Fractional 8, no. 6: 327. https://doi.org/10.3390/fractalfract8060327
APA StyleBorhan, J. R. M., Miah, M. M., Alsharif, F., & Kanan, M. (2024). Abundant Closed-Form Soliton Solutions to the Fractional Stochastic Kraenkel–Manna–Merle System with Bifurcation, Chaotic, Sensitivity, and Modulation Instability Analysis. Fractal and Fractional, 8(6), 327. https://doi.org/10.3390/fractalfract8060327