
Exploring the Depths: Soliton Solutions, Chaotic Analysis, and Sensitivity Analysis in Nonlinear Optical Fibers


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Beta Derivative
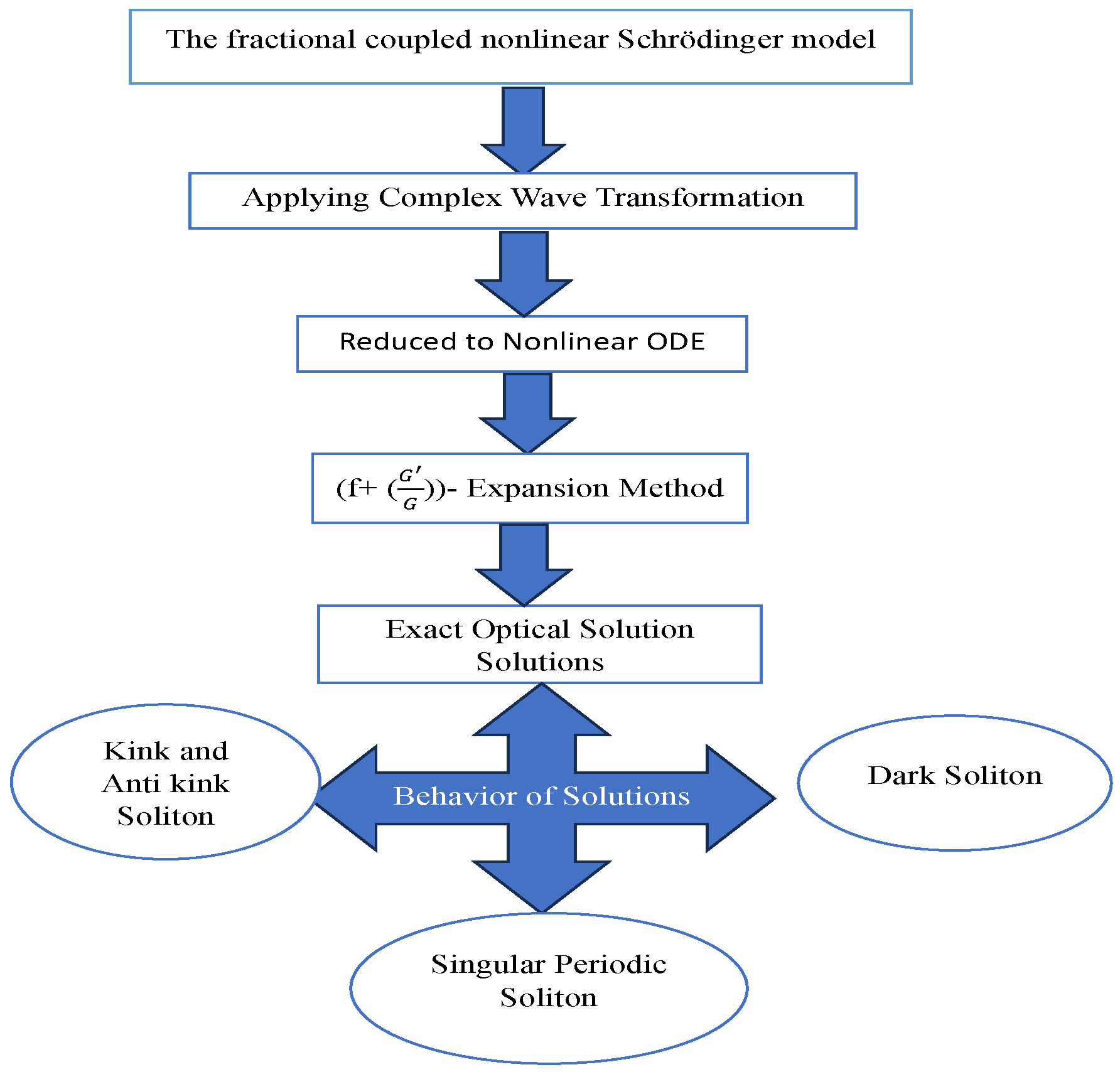
Algorithm of the -Expansion Method
3. Optical Wave Solution to the Fractional NLSE
4. Chaotic Analysis
5. Sensitivity Analysis
6. Results and Discussion
- Figure 6, Figure 7 and Figure 8 present the periodic behaviors of optical solitons. Periodic waves are repetitive disturbances that propagate through a medium at recurring intervals. These waves exhibit a consistent pattern of amplitude, frequency, and wavelength variations over time. The key aspect of periodic waves is that they regularly repeat their form after a certain interval.
- Figure 9 shows the dark behavior of the optical soliton. In the optics, “dark waves” might refer to regions in a wave pattern with significantly lower amplitude or intensity than surrounding areas. This could happen, for example, in interference patterns where formative and destructive interference outcomes are present in regions of light and darkness.
- Figure 10 and Figure 11 present the kink and anti-kink waves. Kinks are localized disturbances or “bumps” that occur within a medium. Anti-kinks are identical to kinks but illustrate transitions in the opposite approach. They also apply a sharp change in the field value (but in the opposite direction approximated to kinks). Anti-kink waves can be considered localized “dips” or “depressions” in the field profile.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gardner, C.S.; Greene, J.M.; Kruskal, M.D.; Miura, R.M. Method for solving the Korteweg-deVries equation. Phys. Rev. Lett. 1967, 19, 1095. [Google Scholar] [CrossRef]
- Zhou, T.; Tian, B.; Shen, Y.; Gao, X. Bilinear form, bilinear auto-Bäcklund transformation, soliton and half-periodic kink solutions on the non-zero background of a (3 + 1)-dimensional time-dependent-coefficient Boiti-Leon-Manna-Pempinelli equation. Wave Motion 2023, 121, 103180. [Google Scholar] [CrossRef]
- Ma, W.; Yong, X.; Lü, X. Soliton solutions to the B-type Kadomtsev–Petviashvili equation under general dispersion relations. Wave Motion 2021, 103, 102719. [Google Scholar] [CrossRef]
- Tang, W. Soliton dynamics to the Higgs equation and its multi-component generalization. Wave Motion 2023, 120, 103144. [Google Scholar] [CrossRef]
- Li, L.; Yu, F. The fourth-order dispersion effect on the soliton waves and soliton stabilities for the cubic-quintic Gross–Pitaevskii equation. Chaos Solitons Fractals 2024, 179, 114377. [Google Scholar] [CrossRef]
- Yao, S.W.; Zafar, A.; Urooj, A.; Tariq, B.; Shakeel, M.; Inc, M. Novel solutions to the coupled KdV equations and the coupled system of variant Boussinesq equations. Results Phys. 2023, 45, 106249. [Google Scholar] [CrossRef]
- Russel Scott, J. Report of waves. In Report of the 14th Meeting of the British Association for the Advancement of Science; Scientific Research: London, UK, 1844; pp. 311–390. [Google Scholar]
- Nguepjouo, F.T.; Kuetche, V.K.; Kofane, T.C. Soliton interactions between multivalued localized waveguide channels within ferrites. Phys. Rev. E 2014, 89, 063201. [Google Scholar] [CrossRef]
- Khater, A.H.; Callebaut, D.K.; Seadawy, A.R. General soliton solutions of an n-dimensional complex Ginzburg–Landau equation. Phys. Scr. 2000, 62, 353. [Google Scholar] [CrossRef]
- Khater, A.H.; Seadawy, A.R.; Helal, M.A. General soliton solutions of an n-dimensional nonlinear Schrödinger equation. Nuovo Cimento B 2000, 115, 1303–1311. [Google Scholar]
- Liu, S.; Fu, Z.; Liu, S.; Zhao, Q. Jacobi elliptic function expansion method and periodic wave solutions of nonlinear wave equations. Phys. Lett. A 2001, 289, 69–74. [Google Scholar] [CrossRef]
- Rady, A.A.; Osman, E.S.; Khalfallah, M. The homogeneous balance method and its application to the Benjamin–Bona–Mahoney (BBM) equation. Appl. Math. Comput. 2010, 217, 1385–1390. [Google Scholar]
- Ali, A.; Seadawy, A.R.; Lu, D. Soliton solutions of the nonlinear Schrödinger equation with the dual power law nonlinearity and resonant nonlinear Schrödinger equation and their modulation instability analysis. Optik 2017, 145, 79–88. [Google Scholar] [CrossRef]
- Ali, A.; Seadawy, A.R.; Lu, D. Computational methods and traveling wave solutions for the fourth-order nonlinear Ablowitz-Kaup-Newell-Segur water wave dynamical equation via two methods and its applications. Open Phys. 2018, 16, 219–222. [Google Scholar] [CrossRef]
- Osman, M.S.; Zafar, A.; Ali, K.K.; Razzaq, W. Novel optical solitons to the perturbed Gerdjikov–Ivanov equation with truncated M-fractional conformable derivative. Optik 2020, 222, 165418. [Google Scholar] [CrossRef]
- Khater, M.M.; Lu, D.; Attia, R.A. Dispersive long wave of nonlinear fractional Wu-Zhang system via a modified auxiliary equation method. AIP Adv. 2019, 9, 025003. [Google Scholar] [CrossRef]
- Akbulut, A.; Kaplan, M. Auxiliary equation method for time-fractional differential equations with conformable derivative. Comput. Math. Appl. 2018, 75, 876–882. [Google Scholar] [CrossRef]
- Younis, M.; Iftikhar, M. Computational examples of a class of fractional order nonlinear evolution equations using modified extended direct algebraic method. J. Comput. Methods Sci. Eng. 2015, 15, 359–365. [Google Scholar] [CrossRef]
- Ahmad, S.; Salman; Ullah, A.; Ahmad, S.; Akgül, A. Bright, dark and hybrid multistrip optical soliton solutions of a non-linear Schrödinger equation using modified extended tanh technique with new Riccati solutions. Opt. Quantum Electron. 2023, 55, 236. [Google Scholar] [CrossRef]
- Zafar, A.; Shakeel, M.; Ali, A.; Rezazadeh, H.; Bekir, A. Analytical study of complex Ginzburg–Landau equation arising in nonlinear optics. J. Nonlinear Opt. Phys. Mater. 2023, 32, 2350010. [Google Scholar] [CrossRef]
- Ma, H.; Mao, X.; Deng, A. Interaction solutions for the (2 + 1)-dimensional extended Boiti-Leon-Manna-Pempinelli equation in incompressible fluid. Commun. Theor. Phys. 2023, 75, 085001. [Google Scholar] [CrossRef]
- Biswas, S.; Ghosh, U.; Raut, S. Construction of fractional granular model and bright, dark, lump, breather types soliton solutions using Hirota bilinear method. Chaos Solitons Fractals 2023, 172, 113520. [Google Scholar] [CrossRef]
- Jumarie, G. Modified Riemann-Liouville derivative and fractional taylor series of nondifferentiable functions further results. Comput. Math. Appl. 2006, 51, 1367–1376. [Google Scholar] [CrossRef]
- Podlubny, I. An introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications. Math. Sci. Eng. 1999, 198, 340. [Google Scholar]
- Wang, K.-L. A novel computational approach to the local fractional lonngren wave equation in fractal media. Math. Sci. 2023, 1–6. [Google Scholar] [CrossRef]
- Yepez-Martinez, H.; Gómez-Aguilar, J. Optical solitons solution of resonance nonlinear Schrödinger type equation with Atangana’s-conformable derivative using sub-equation method. Waves Random Complex Media 2021, 31, 573–596. [Google Scholar] [CrossRef]
- Almeida, R. A Caputo fractional derivative of a function with respect to another function. Commun. Nonlinear Sci. Numer. Simul. 2017, 44, 460–481. [Google Scholar] [CrossRef]
- Atta, D. Thermal diffusion responses in an infinite medium with a spherical cavity using the Atangana-Baleanu fractional operator. J. Appl. Comput. Mech. 2022, 8, 1358–1369. [Google Scholar]
- Ablowitz, M.J.; Prinari, B.; Trubatch, A.D. Discrete and Continuous Nonlinear Schrödinger Systems; Cambridge University Press: Cambridge, UK, 2004; Volume 302. [Google Scholar]
- Rafiq, M.H.; Jannat, N.; Rafiq, M.N. Sensitivity analysis and analytical study of the three-component coupled NLS-type equations in fiber optics. Opt. Quantum Electron. 2023, 55, 637. [Google Scholar] [CrossRef]
- Shakeel, M.; Bibi, A.; AlQahtani, S.A.; Alawwad, A.M. Dynamical study of a time fractional nonlinear Schrödinger model in optical fibers. Opt. Quantum Electron. 2023, 55, 1010. [Google Scholar] [CrossRef]
- Tariq, K.U.; Nadeem, M.; Zeeshan, M.; Guran, L.; Bucur, A. On the dynamics of a dual space time fractional nonlinear Schrödinger model in optical fibers. Results Phys. 2023, 51, 106603. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shakeel, M.; Liu, X.; Alshammari, F.S. Exploring the Depths: Soliton Solutions, Chaotic Analysis, and Sensitivity Analysis in Nonlinear Optical Fibers. Fractal Fract. 2024, 8, 317. https://doi.org/10.3390/fractalfract8060317
Shakeel M, Liu X, Alshammari FS. Exploring the Depths: Soliton Solutions, Chaotic Analysis, and Sensitivity Analysis in Nonlinear Optical Fibers. Fractal and Fractional. 2024; 8(6):317. https://doi.org/10.3390/fractalfract8060317
Chicago/Turabian StyleShakeel, Muhammad, Xinge Liu, and Fehaid Salem Alshammari. 2024. "Exploring the Depths: Soliton Solutions, Chaotic Analysis, and Sensitivity Analysis in Nonlinear Optical Fibers" Fractal and Fractional 8, no. 6: 317. https://doi.org/10.3390/fractalfract8060317
APA StyleShakeel, M., Liu, X., & Alshammari, F. S. (2024). Exploring the Depths: Soliton Solutions, Chaotic Analysis, and Sensitivity Analysis in Nonlinear Optical Fibers. Fractal and Fractional, 8(6), 317. https://doi.org/10.3390/fractalfract8060317