
Adaptive Terminal Sliding-Mode Synchronization Control with Chattering Elimination for a Fractional-Order Chaotic System


Abstract
1. Introduction
2. Preliminaries and System Description
2.1. Fractional Calculus
2.2. Descriptions of the FOCSs
3. Main Results
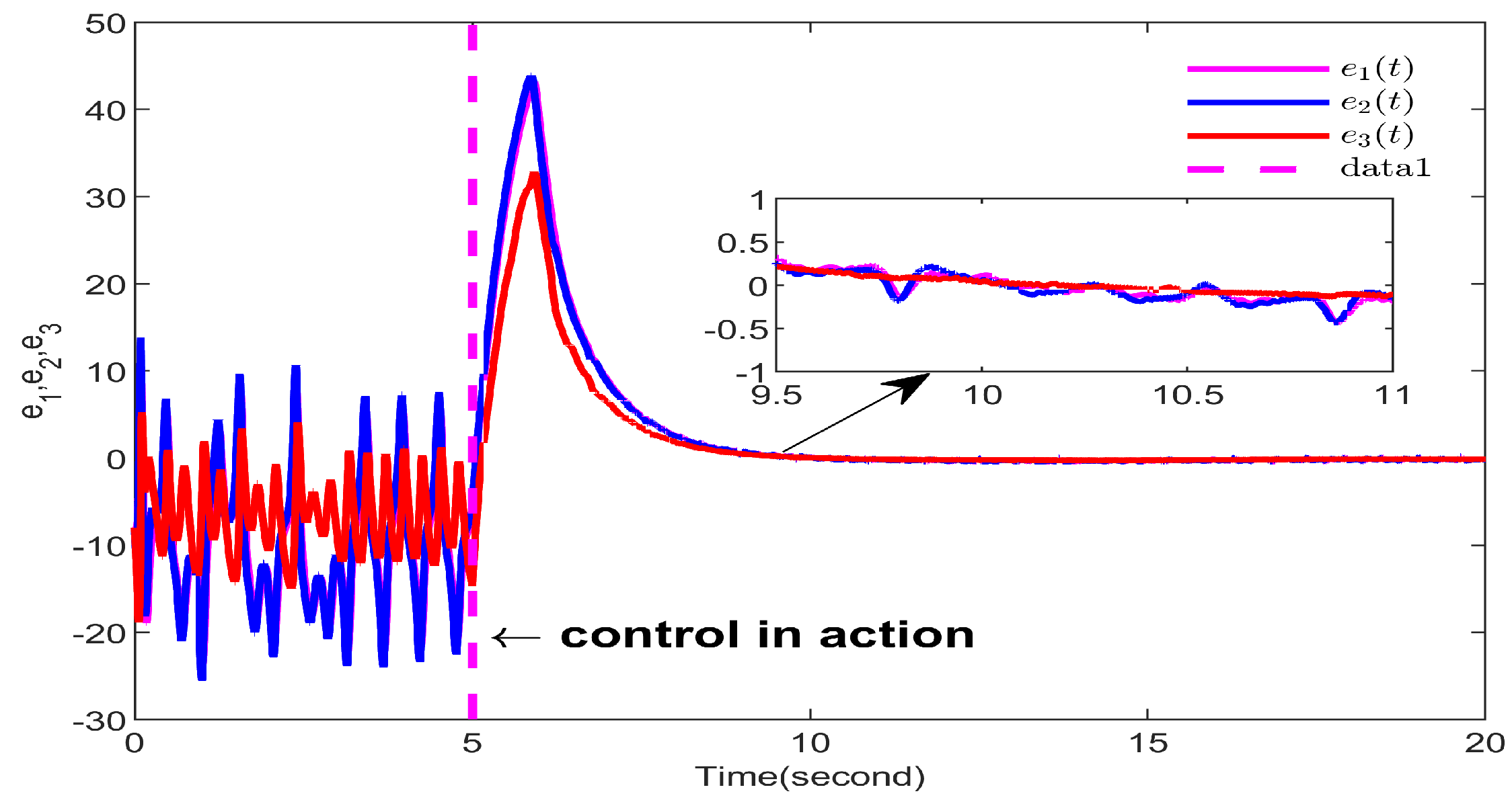
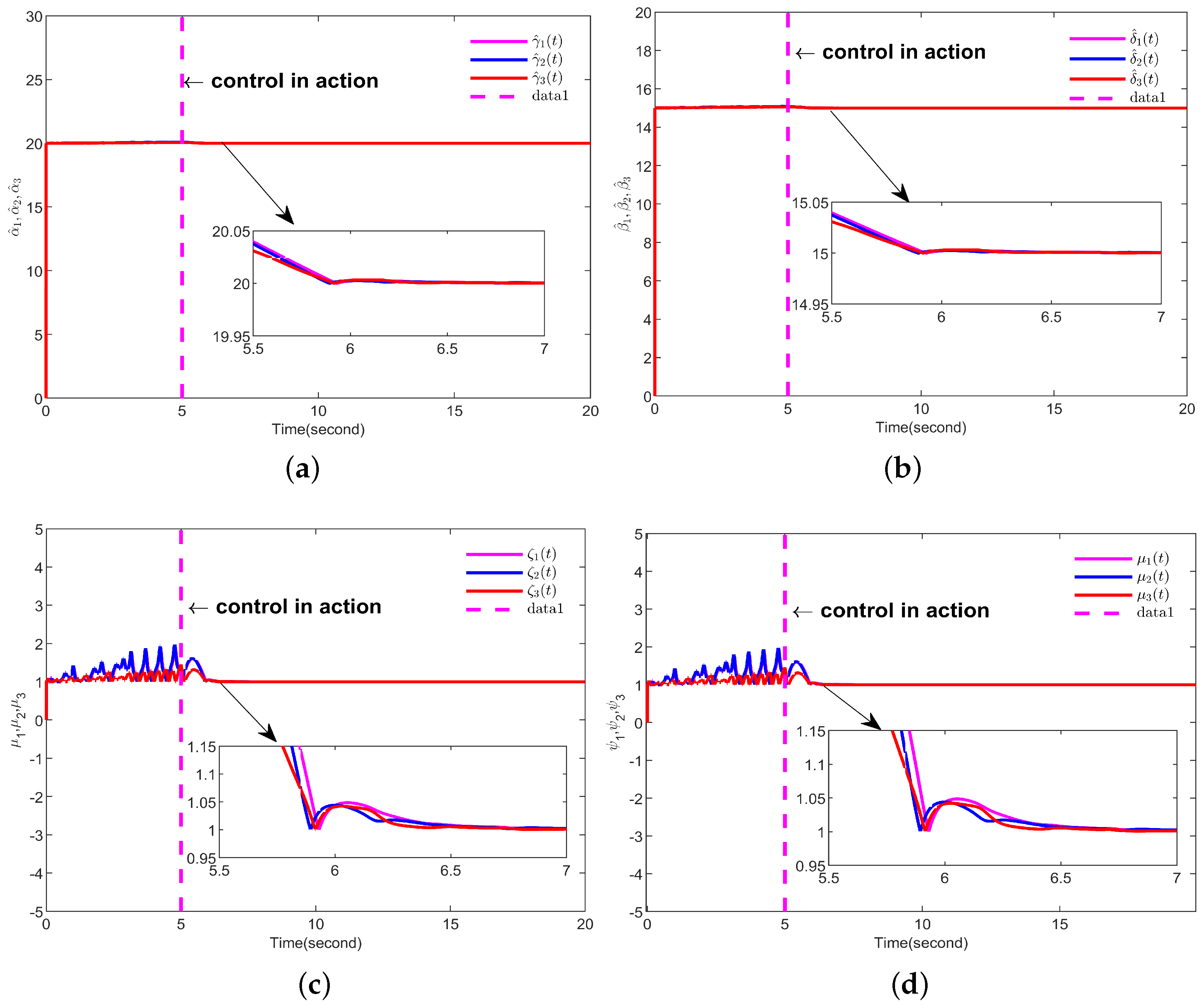
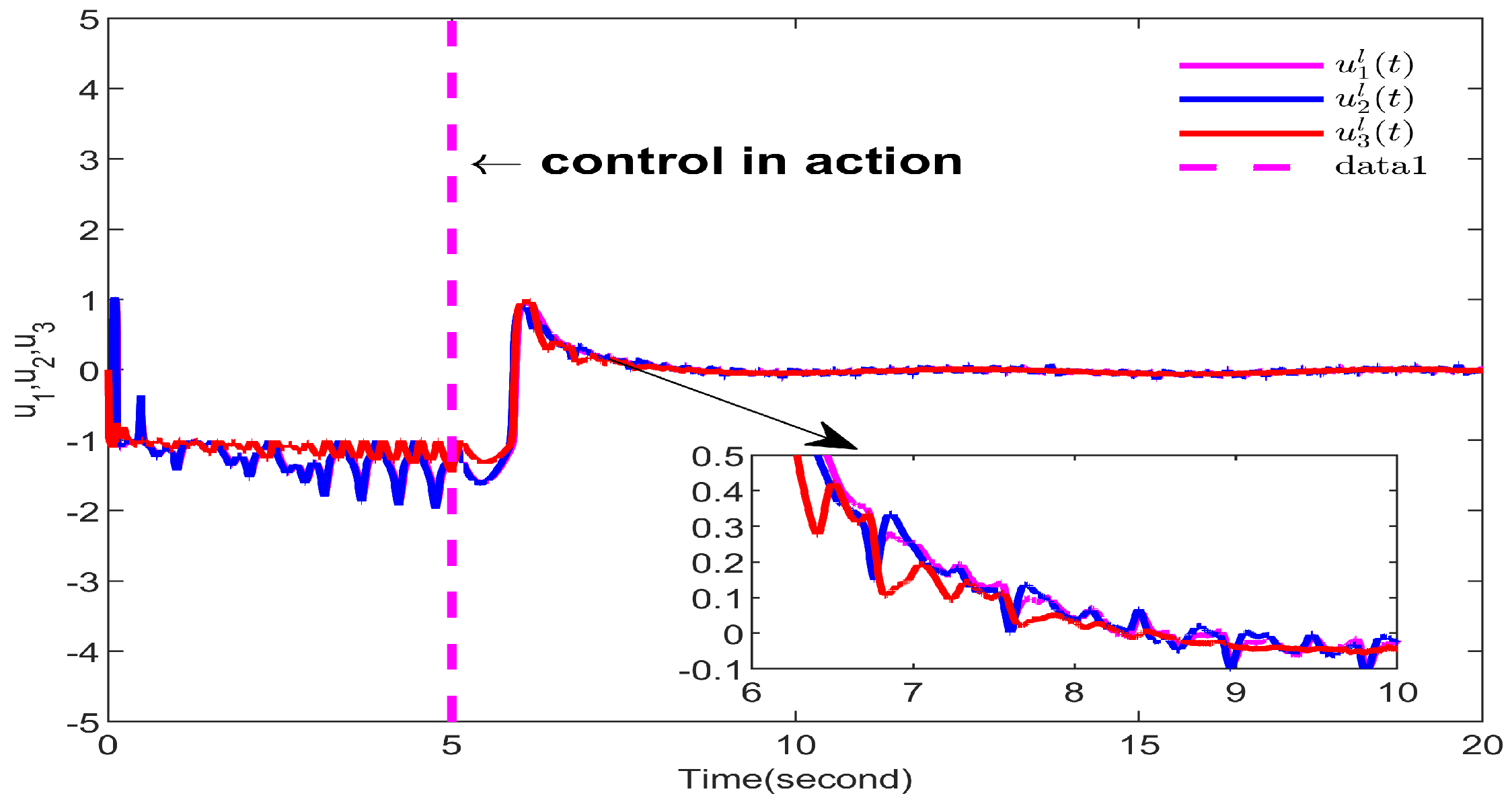
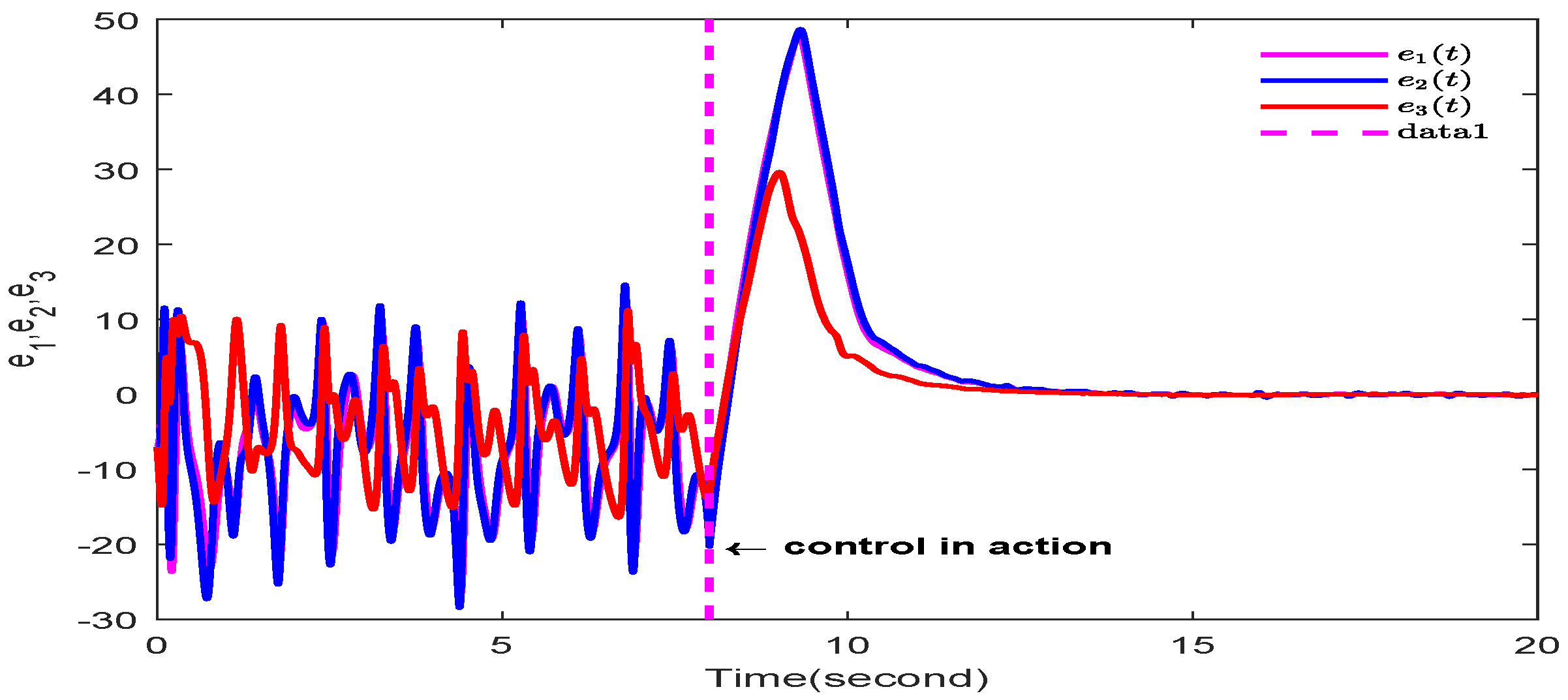
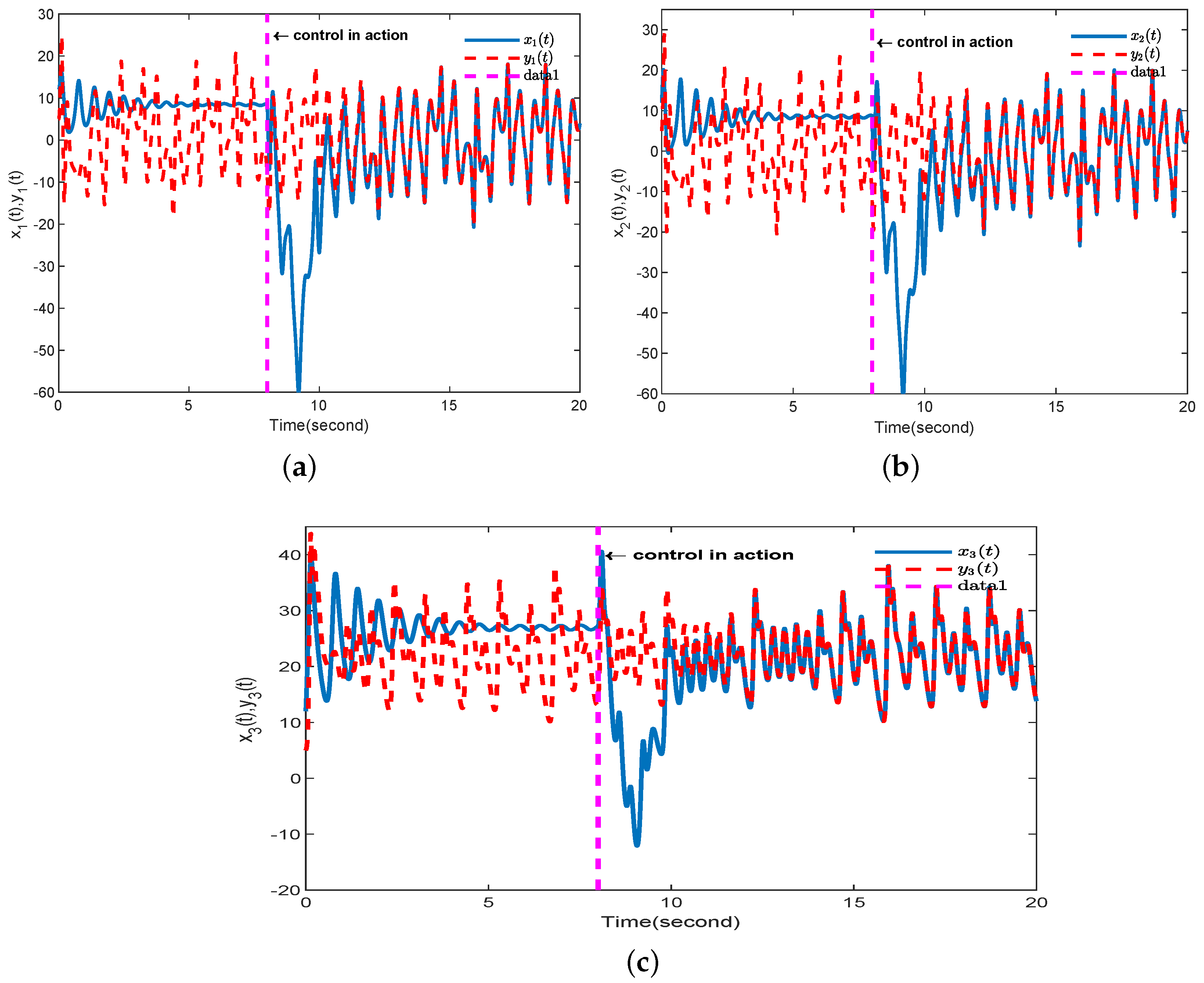
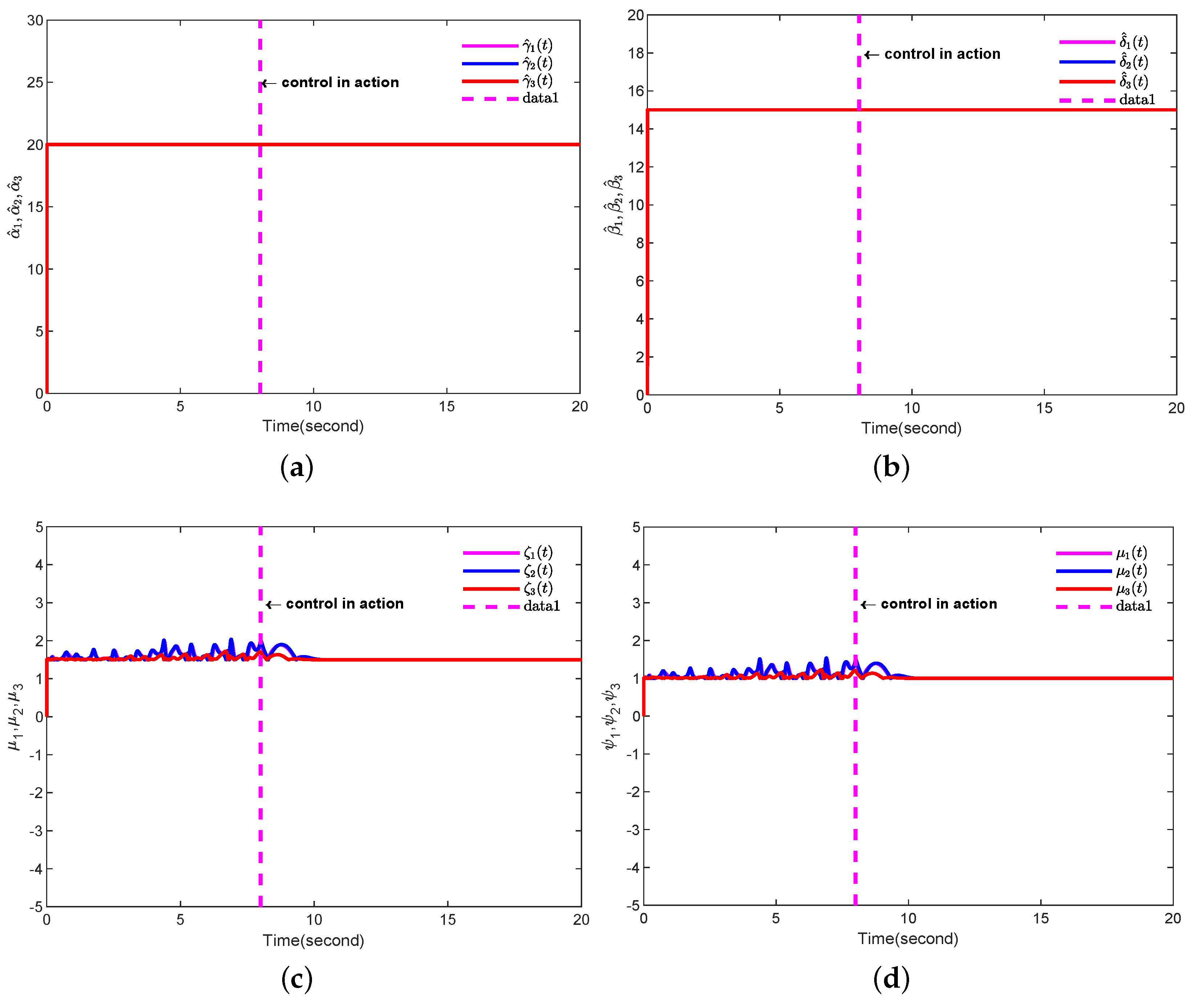
4. Simulation Results
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, T.; Yan, H.; Banerjee, S.; Mou, J. A fractional-order chaotic system with hidden attractor and self-excited attractor and its DSP implementation. Chaos Solitons Fractals 2021, 145, 110791. [Google Scholar] [CrossRef]
- Wang, H.; Weng, C.; Song, Z.; Cai, J. Research on the law of spatial fractional calculus diffusion equation in the evolution of chaotic economic system. Chaos Solitons Fractals 2020, 131, 109462. [Google Scholar] [CrossRef]
- Sene, N. Introduction to the fractional-order chaotic system under fractional operator in Caputo sense. Alex. Eng. J. 2021, 60, 3997–4014. [Google Scholar] [CrossRef]
- Baleanu, D.; Zibaei, S.; Namjoo, M.; Jajarmi, A. A nonstandard finite difference scheme for the modeling and nonidentical synchronization of a novel fractional chaotic system. Adv. Differ. Equ. 2021, 2021, 308. [Google Scholar] [CrossRef]
- Balootaki, M.A.; Rahmani, H.; Moeinkhah, H.; Mohammadzadeh, A. On the synchronization and stabilization of fractional-order chaotic systems: Recent advances and future perspectives. Phys. A Stat. Mech. Its Appl. 2020, 551, 124203. [Google Scholar] [CrossRef]
- Qi, F.; Qu, J.; Chai, Y.; Chen, L.; Lopes, A.M. Synchronization of incommensurate fractional-order chaotic systems based on linear feedback control. Fractal Fract. 2022, 6, 221. [Google Scholar] [CrossRef]
- Mobayen, S.; Pujol-Vázquez, G. A robust LMI approach on nonlinear feedback stabilization of continuous state-delay systems with Lipschitzian nonlinearities: Experimental validation. Iran. J. Sci. Technol. Trans. Mech. Eng. 2019, 43, 549–558. [Google Scholar] [CrossRef]
- Luo, S.; Lewis, F.L.; Song, Y.; Vamvoudakis, K.G. Adaptive backstepping optimal control of a fractional-order chaotic magnetic-field electromechanical transducer. Nonlinear Dyn. 2020, 100, 523–540. [Google Scholar] [CrossRef]
- Dalir, M.; Bigdeli, N. An adaptive neuro-fuzzy backstepping sliding mode controller for finite time stabilization of fractional-order uncertain chaotic systems with time-varying delays. Int. J. Mach. Learn. Cybern. 2021, 12, 1949–1971. [Google Scholar] [CrossRef]
- Qiu, H.; Liu, H.; Zhang, X. Composite adaptive fuzzy backstepping control of uncertain fractional-order nonlinear systems with quantized input. Int. J. Mach. Learn. Cybern. 2023, 14, 833–847. [Google Scholar] [CrossRef]
- Li, Y.; Yang, T.; Tong, S. Adaptive neural networks finite-time optimal control for a class of nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 4451–4460. [Google Scholar] [CrossRef] [PubMed]
- Luo, R.; Huang, M.; Su, H. Robust control and synchronization of 3-D uncertain fractional-order chaotic systems with external disturbances via adding one power integrator control. Complexity 2019, 2019, 8417536. [Google Scholar] [CrossRef]
- Kiruthika, R.; Krishnasamy, R.; Lakshmanan, S.; Prakash, M.; Manivannan, A. Non-fragile sampled-data control for synchronization of chaotic fractional-order delayed neural networks via LMI approach. Chaos Solitons Fractals 2023, 169, 113252. [Google Scholar] [CrossRef]
- Al-Raeei, M. Applying fractional quantum mechanics to systems with electrical screening effects. Chaos Solitons Fractals 2021, 150, 111209. [Google Scholar] [CrossRef]
- Stankevich, N.; Volkov, E. Chaos–hyperchaos transition in three identical quorum-sensing mean-field coupled ring oscillators. Chaos Interdiscip. J. Nonlinear Sci. 2021, 31. [Google Scholar] [CrossRef] [PubMed]
- Rong, C.; Zhang, B. Fractional electromagnetic waves in circular waveguides with fractional-order inductance characteristics. J. Electromagn. Waves Appl. 2019, 33, 2142–2154. [Google Scholar] [CrossRef]
- Hao, Y.; Huang, C.; Cao, J.; Liu, H. Positivity and Stability of Fractional-Order Linear Time-Delay Systems. J. Syst. Sci. Complex. 2022, 35, 2181–2207. [Google Scholar] [CrossRef]
- Ghanbari, B. On the modeling of the interaction between tumor growth and the immune system using some new fractional and fractional-fractal operators. Adv. Differ. Equ. 2020, 2020, 1–32. [Google Scholar] [CrossRef]
- Qiu, H.; Wang, H.; Pan, Y.; Cao, J.; Liu, H. Stability and Lgain of Positive Fractional-Order Singular Systems With Time-Varying Delays. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 3534–3538. [Google Scholar] [CrossRef]
- Norouzi, B.; Mirzakuchaki, S. Breaking a novel image encryption scheme based on an improper fractional order chaotic system. Multimed. Tools Appl. 2017, 76, 1817–1826. [Google Scholar] [CrossRef]
- Ma, Z.; Ma, H. Reduced-order observer-based adaptive backstepping control for fractional-order uncertain nonlinear systems. IEEE Trans. Fuzzy Syst. 2019, 28, 3287–3301. [Google Scholar] [CrossRef]
- Feng, T.; Wang, Y.E.; Liu, L.; Wu, B. Observer-based event-triggered control for uncertain fractional-order systems. J. Frankl. Inst. 2020, 357, 9423–9441. [Google Scholar] [CrossRef]
- Naik, P.A.; Zu, J.; Owolabi, K.M. Global dynamics of a fractional order model for the transmission of HIV epidemic with optimal control. Chaos Solitons Fractals 2020, 138, 109826. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Yang, Y. Impulsive effects on bipartite quasi synchronization of extended Caputo fractional order coupled networks. J. Frankl. Inst. 2020, 357, 4328–4348. [Google Scholar] [CrossRef]
- Rajagopal, K.; Panahi, S.; Chen, M.; Jafari, S.; Bao, B. Suppressing spiral wave turbulence in a simple fractional-order discrete neuron map using impulse triggering. Fractals 2021, 29, 2140030. [Google Scholar] [CrossRef]
- You, X.; Shi, M.; Guo, B.; Zhu, Y.; Lai, W.; Dian, S.; Liu, K. Event-triggered adaptive fuzzy tracking control for a class of fractional-order uncertain nonlinear systems with external disturbance. Chaos Solitons Fractals 2022, 161, 112393. [Google Scholar] [CrossRef]
- Hao, Y.; Fang, Z.; Liu, H. Stabilization of delayed fractional-order T-S fuzzy systems with input saturations and system uncertainties. Asian J. Control 2023, 26, 246–264. [Google Scholar] [CrossRef]
- Jiang, J.; Cao, D.; Chen, H. Sliding mode control for a class of variable-order fractional chaotic systems. J. Frankl. Inst. 2020, 357, 10127–10158. [Google Scholar] [CrossRef]
- Modiri, A.; Mobayen, S. Adaptive terminal sliding mode control scheme for synchronization of fractional-order uncertain chaotic systems. ISA Trans. 2020, 105, 33–50. [Google Scholar] [CrossRef]
- Rabah, K.; Ladaci, S. A fractional adaptive sliding mode control configuration for synchronizing disturbed fractional-order chaotic systems. Circuits Syst. Signal Process. 2020, 39, 1244–1264. [Google Scholar] [CrossRef]
- Song, C.; Fei, S.; Cao, J.; Huang, C. Robust synchronization of fractional-order uncertain chaotic systems based on output feedback sliding mode control. Mathematics 2019, 7, 599. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, Y.; Chen, Y.; Chen, X.; Xi, L. Fuzzy neural network-based chaos synchronization for a class of fractional-order chaotic systems: An adaptive sliding mode control approach. Nonlinear Dyn. 2020, 100, 1275–1287. [Google Scholar] [CrossRef]
- Khan, A.; Nasreen; Jahanzaib, L.S. Synchronization on the adaptive sliding mode controller for fractional order complex chaotic systems with uncertainty and disturbances. Int. J. Dyn. Control 2019, 7, 1419–1433. [Google Scholar] [CrossRef]
- Labbaf Khaniki, M.A.; Salehi Kho, M.; Aliyari Shoorehdeli, M. Control and synchronization of chaotic spur gear system using adaptive non-singular fast terminal sliding mode controller. Trans. Inst. Meas. Control 2022, 44, 2795–2808. [Google Scholar] [CrossRef]
- Shao, S.; Chen, M.; Yan, X. Adaptive sliding mode synchronization for a class of fractional-order chaotic systems with disturbance. Nonlinear Dyn. 2016, 83, 1855–1866. [Google Scholar] [CrossRef]
- Almatroud, A.O. Synchronisation of two different uncertain fractional-order chaotic systems with unknown parameters using a modified adaptive sliding-mode controller. Adv. Differ. Equ. 2020, 2020, 1–14. [Google Scholar] [CrossRef]
- Mirrezapour, S.Z.; Zare, A.; Hallaji, M. A new fractional sliding mode controller based on nonlinear fractional-order proportional integral derivative controller structure to synchronize fractional-order chaotic systems with uncertainty and disturbances. J. Vib. Control 2022, 28, 773–785. [Google Scholar] [CrossRef]
- Giap, V.N.; Nguyen, Q.D.; Trung, N.K.; Huang, S.C.; Trinh, X.T. Disturbance observer based on terminal sliding-mode control for a secure communication of fractional-order takagi-sugeno fuzzy chaotic systems. In Proceedings of the International Conference on Advanced Mechanical Engineering, Automation and Sustainable Development, Ha Long, Vietnam, 4–7 November 2021; Springer: Cham, Switzerland, 2021; pp. 936–941. [Google Scholar]
- Sweilam, N.; Khader, M.; Al-Bar, R. Numerical studies for a multi-order fractional differential equation. Phys. Lett. A 2007, 371, 26–33. [Google Scholar] [CrossRef]
- Dai, H.; Chen, W. New power law inequalities for fractional derivative and stability analysis of fractional order systems. Nonlinear Dyn. 2017, 87, 1531–1542. [Google Scholar] [CrossRef]
- Aghababa, M.P.; Akbari, M.E. A chattering-free robust adaptive sliding mode controller for synchronization of two different chaotic systems with unknown uncertainties and external disturbances. Appl. Math. Comput. 2012, 218, 5757–5768. [Google Scholar] [CrossRef]
- Wei, X.; Liu, D.Y.; Boutat, D. Nonasymptotic pseudo-state estimation for a class of fractional order linear systems. IEEE Trans. Autom. Control 2017, 62, 1150–1164. [Google Scholar] [CrossRef]
- Lee, H.; Utkin, V.I. Chattering suppression methods in sliding mode control systems. Annu. Rev. Control 2007, 31, 179–188. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| ATSMC | Adaptive terminal sliding-mode control |
| FOCS | Fractional-order chaotic system |
| SMC | Sliding-mode control |
| Real number space | |
| Gamma function | |
| n-dimensional vectors space | |
| First norm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C. Adaptive Terminal Sliding-Mode Synchronization Control with Chattering Elimination for a Fractional-Order Chaotic System. Fractal Fract. 2024, 8, 188. https://doi.org/10.3390/fractalfract8040188
Wang C. Adaptive Terminal Sliding-Mode Synchronization Control with Chattering Elimination for a Fractional-Order Chaotic System. Fractal and Fractional. 2024; 8(4):188. https://doi.org/10.3390/fractalfract8040188
Chicago/Turabian StyleWang, Chenhui. 2024. "Adaptive Terminal Sliding-Mode Synchronization Control with Chattering Elimination for a Fractional-Order Chaotic System" Fractal and Fractional 8, no. 4: 188. https://doi.org/10.3390/fractalfract8040188
APA StyleWang, C. (2024). Adaptive Terminal Sliding-Mode Synchronization Control with Chattering Elimination for a Fractional-Order Chaotic System. Fractal and Fractional, 8(4), 188. https://doi.org/10.3390/fractalfract8040188