
Generalized Sampling Theory in the Quaternion Domain: A Fractional Fourier Approach
 , , ,
, , ,  and
and {kind=link}
{kind=link}
Abstract
1. Introduction
Related Work on Generalized Sampling Expansion
- We derived the GSE for the 1DQFRFT domain, providing a robust framework for quaternion signal processing.
- We employed quaternion Fourier filters in the derivation of the GSE, showcasing their effectiveness in managing the additional complexity and degrees of freedom inherent in quaternion signals.
- We implemented the derivative technique of the 1DQFRFT to achieve accurate signal reconstruction, highlighting its precision and reliability within the quaternion framework.
- We suggested future research directions, including the exploration of other transforms in the quaternion domain, and the extension of the GSE framework to higher dimensions.
- We identified open questions in the GSE for quaternionic signals, encouraging further exploration and discovery in this emerging area of study.
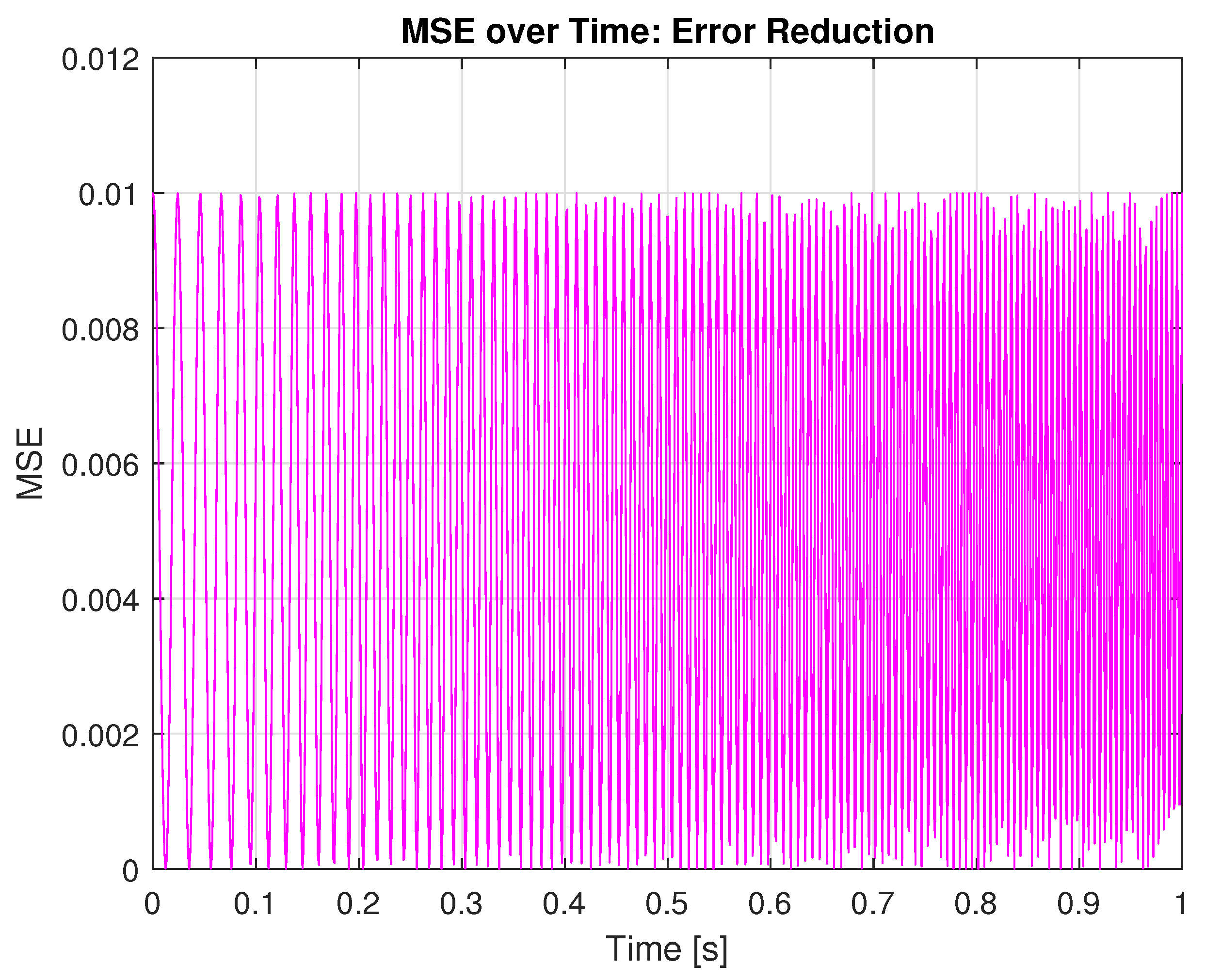
- We have discussed a detailed case study for the use of the QFRFT-based GSE in analyzing its performance in reducing stationary Gaussian noise versus non-stationary, chirped noise.
2. Preliminaries
3. Quaternion Fractional Fourier Transform Domain
3.1. QFRFT Based GSE
3.2. Sampling Reconstruction Method Using Signal and Its Derivative
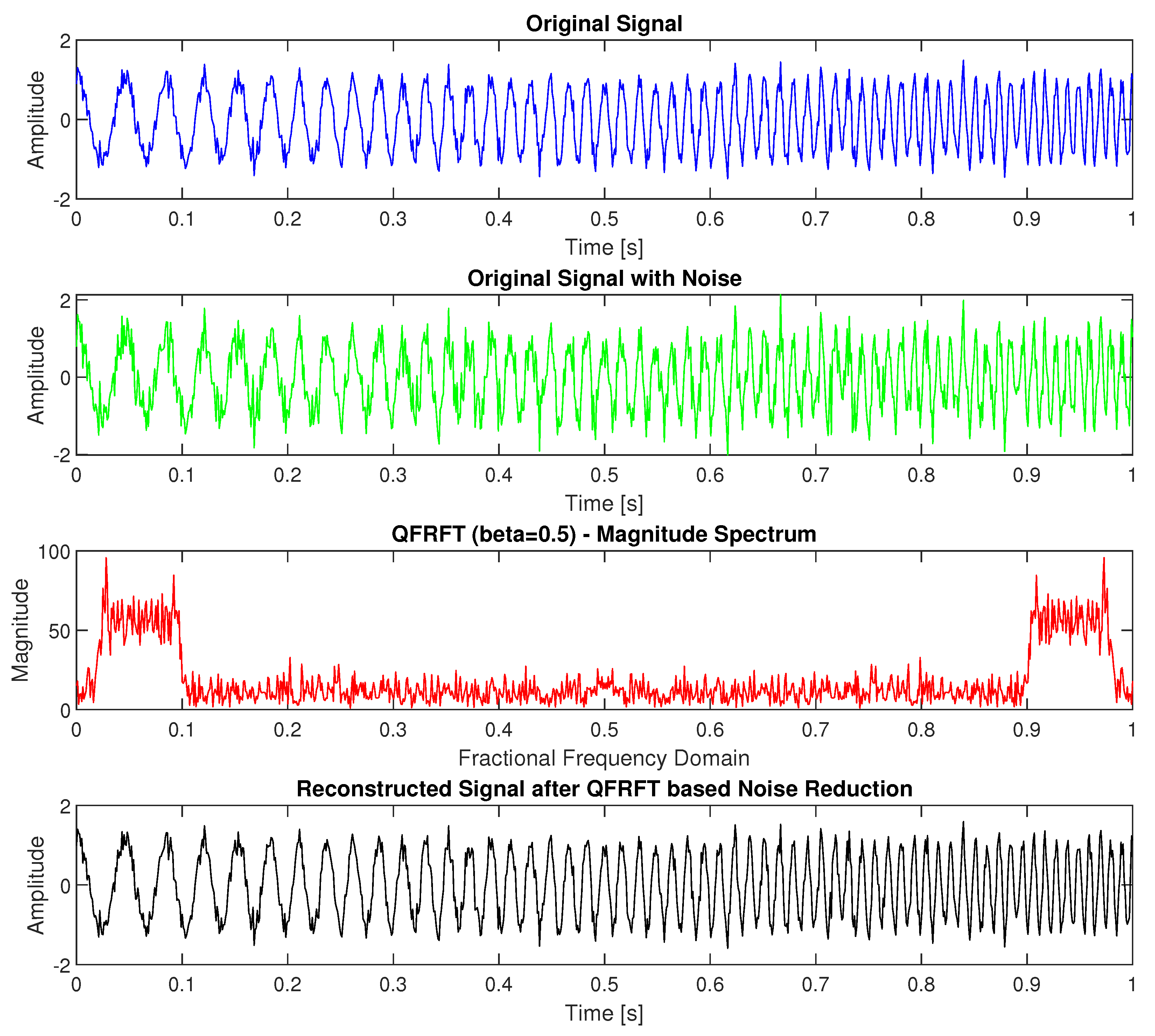
4. Case Study
- Generating the original signal.
- Adding noise to the original signal.
- Applying the QFRFT-based GSE at .
- Reconstructing the signal using the inverse IQFRFT.
5. Discussion and Analysis
6. Conclusions and Future Insights
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zayed, A.I. A convolution and product theorem for the fractional Fourier transform. IEEE Signal Process. Lett. 1998, 5, 101–103. [Google Scholar] [CrossRef]
- Ervin, S.; Igor, D.; Ljubiša, S. Fractional Fourier transform as a signal processing tool: An overview of recent developments. Signal Process. 2011, 91, 1351–1369. [Google Scholar] [CrossRef]
- Victor, N. The Fractional Order Fourier Transform and its Application to Quantum Mechanics. IMA J. Appl. Math. 1980, 25, 241–265. [Google Scholar] [CrossRef]
- Pei, S.-C.; Ding, J.-J. Fractional Fourier Transform, Wigner Distribution, and Filter Design for Stationary and Nonstationary Random Processes. IEEE Trans. Signal Process. 2010, 58, 4079–4092. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Luchko, Y.F.; Martínez, H.; Trujillo, J.J. Fractional Fourier transform in the framework of fractional calculus operators. Integral Transform. Spec. Funct. 2010, 21, 779–795. [Google Scholar] [CrossRef]
- Mcbride, A.C.; Kerr, F.H. On Namias’s Fractional Fourier Transforms. IMA J. Appl. Math. 1987, 39, 159–175. [Google Scholar] [CrossRef]
- Ozaktas, H.M.; Kutay, M.A. The fractional Fourier transform. In Proceedings of the 2001 European Control Conference (ECC), Porto, Portugal, 4–7 September 2001; pp. 1477–1483. [Google Scholar] [CrossRef]
- Almeida, L.B. The Fractional Fourier Transform and Time-Frequency Representations. IEEE Trans. Signal Process. 1994, 42, 3084–3091. [Google Scholar] [CrossRef]
- Xia, X.-G. On bandlimited signals with fractional Fourier transform. IEEE Signal Process. Lett. 1996, 3, 72–74. [Google Scholar] [CrossRef]
- Zayed, A.I. On the relationship between the Fourier and fractional Fourier transforms. IEEE Signal Process. Lett. 1996, 3, 310–311. [Google Scholar] [CrossRef]
- Roopkumar, R. Quaternionic one-dimensional fractional Fourier transform. Optik 2016, 127, 11657–11661. [Google Scholar] [CrossRef]
- Wei, D.; Li, Y. Different forms of Plancherel theorem for fractional quaternion Fourier transform. Optik 2013, 124, 6999–7002. [Google Scholar] [CrossRef]
- Ell, T.A.; Sangwine, S.J. Hypercomplex Fourier Transforms of Color Images. IEEE Trans. Image Process. 2007, 16, 22–35. [Google Scholar] [CrossRef] [PubMed]
- Bie, H.D.; Schepper, N.D.; Ell, T.A.; Rubrecht, K.; Sangwine, S.J. Connecting spatial and frequency domains for the quaternion Fourier transform. Appl. Math. Comput. 2015, 271, 581–593. [Google Scholar] [CrossRef]
- Xu, G.; Wang, X.; Xu, X. Fractional quaternion Fourier transform, convolution and correlation. Signal Process. 2008, 88, 2511–2517. [Google Scholar] [CrossRef]
- Siddiqui, S.; Li, B.Z. Quaternionic One-Dimensional Linear Canonical Transform. Optik 2021, 244, 166914. [Google Scholar] [CrossRef]
- Siddiqui, S.; Samad, M.A.; Ismoiljonovich, F.D. One dimensional quaternion linear canonical transform in probability theory. Signal Image Video Process. 2024, 18, 9419–9430. [Google Scholar] [CrossRef]
- Zhao, H.; Li, B.Z. Sampling Theorems Associated with Offset Linear Canonical Transform by Polar Coordinates. Fractal Fract. 2024, 8, 559. [Google Scholar] [CrossRef]
- Jerri, A.J. The Shannon sampling theorem—Its various extensions and applications: A tutorial review. Proc. IEEE 1977, 65, 1565–1596. [Google Scholar] [CrossRef]
- Torres, R.; Pellat-Finet, P.; Torres, Y. Sampling Theorem for Fractional Bandlimited Signals: A Self-Contained Proof. Application to Digital Holography. IEEE Signal Process. Lett. 2006, 13, 676–679. [Google Scholar] [CrossRef]
- Hu, X.; Cheng, D.; Kou, K.I. Sampling formulas for 2D quaternionic signals associated with various quaternion Fourier and linear canonical transforms. Front. Inform. Technol. Electron. Eng. 2022, 23, 463–478. [Google Scholar] [CrossRef]
- Erseghe, T.; Kraniauskas, P.; Carioraro, G. Unified fractional Fourier transform and sampling theorem. IEEE Trans. Signal Process. 1999, 47, 3419–3423. [Google Scholar] [CrossRef]
- Bhandari, A.; Marziliano, P. Sampling and Reconstruction of Sparse Signals in Fractional Fourier Domain. IEEE Signal Process. Lett. 2010, 17, 221–224. [Google Scholar] [CrossRef]
- Cheng, D.; Kou, K.I. Generalized sampling expansions associated with quaternion Fourier transform. Math. Methods Appl. Sci. 2018, 41, 4021–4032. [Google Scholar] [CrossRef]
- Siddiqui, S.; Li, B.Z.; Samad, M.A. Generalized sampling expansion for the quaternion linear canonical transform. Signal Image Video Process. 2024, 18, 345–354. [Google Scholar] [CrossRef]
- Siddiqui, S.; Li, B.Z.; Samad, M.A. New Sampling Expansion Related to Derivatives in Quaternion Fourier Transform Domain. Mathematics 2022, 10, 1217. [Google Scholar] [CrossRef]
- Hu, X.; Kou, K.I. Sampling formulas for non-bandlimited quaternionic signals. Signal Image Video Process. 2022, 16, 1559–1567. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samad, M.A.; Xia, Y.; Al-Rashidi, N.; Siddiqui, S.; Bhat, M.Y.; Alshanbari, H.M. Generalized Sampling Theory in the Quaternion Domain: A Fractional Fourier Approach. Fractal Fract. 2024, 8, 748. https://doi.org/10.3390/fractalfract8120748
Samad MA, Xia Y, Al-Rashidi N, Siddiqui S, Bhat MY, Alshanbari HM. Generalized Sampling Theory in the Quaternion Domain: A Fractional Fourier Approach. Fractal and Fractional. 2024; 8(12):748. https://doi.org/10.3390/fractalfract8120748
Chicago/Turabian StyleSamad, Muhammad Adnan, Yuanqing Xia, Nader Al-Rashidi, Saima Siddiqui, Muhammad Younus Bhat, and Huda M. Alshanbari. 2024. "Generalized Sampling Theory in the Quaternion Domain: A Fractional Fourier Approach" Fractal and Fractional 8, no. 12: 748. https://doi.org/10.3390/fractalfract8120748
APA StyleSamad, M. A., Xia, Y., Al-Rashidi, N., Siddiqui, S., Bhat, M. Y., & Alshanbari, H. M. (2024). Generalized Sampling Theory in the Quaternion Domain: A Fractional Fourier Approach. Fractal and Fractional, 8(12), 748. https://doi.org/10.3390/fractalfract8120748