
Variable Time Step Algorithm for Transient Response Analysis for Control and Optimization


Abstract
1. Introduction
2. Materials and Methods
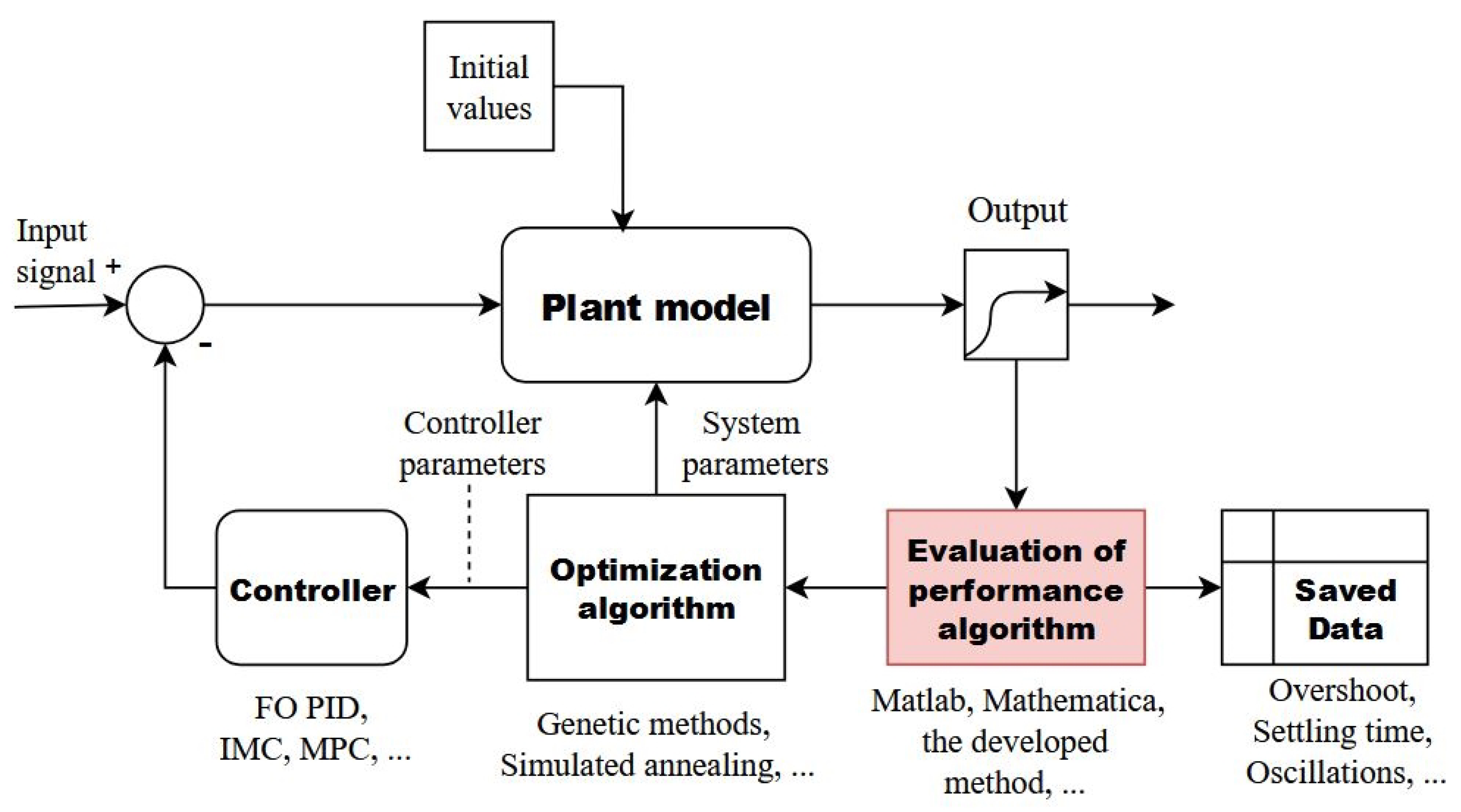
2.1. Problem Statement
2.2. Control Systems Under Consideration
2.2.1. Integer-Order Dynamic Systems
2.2.2. Fractional-Order Dynamic Systems
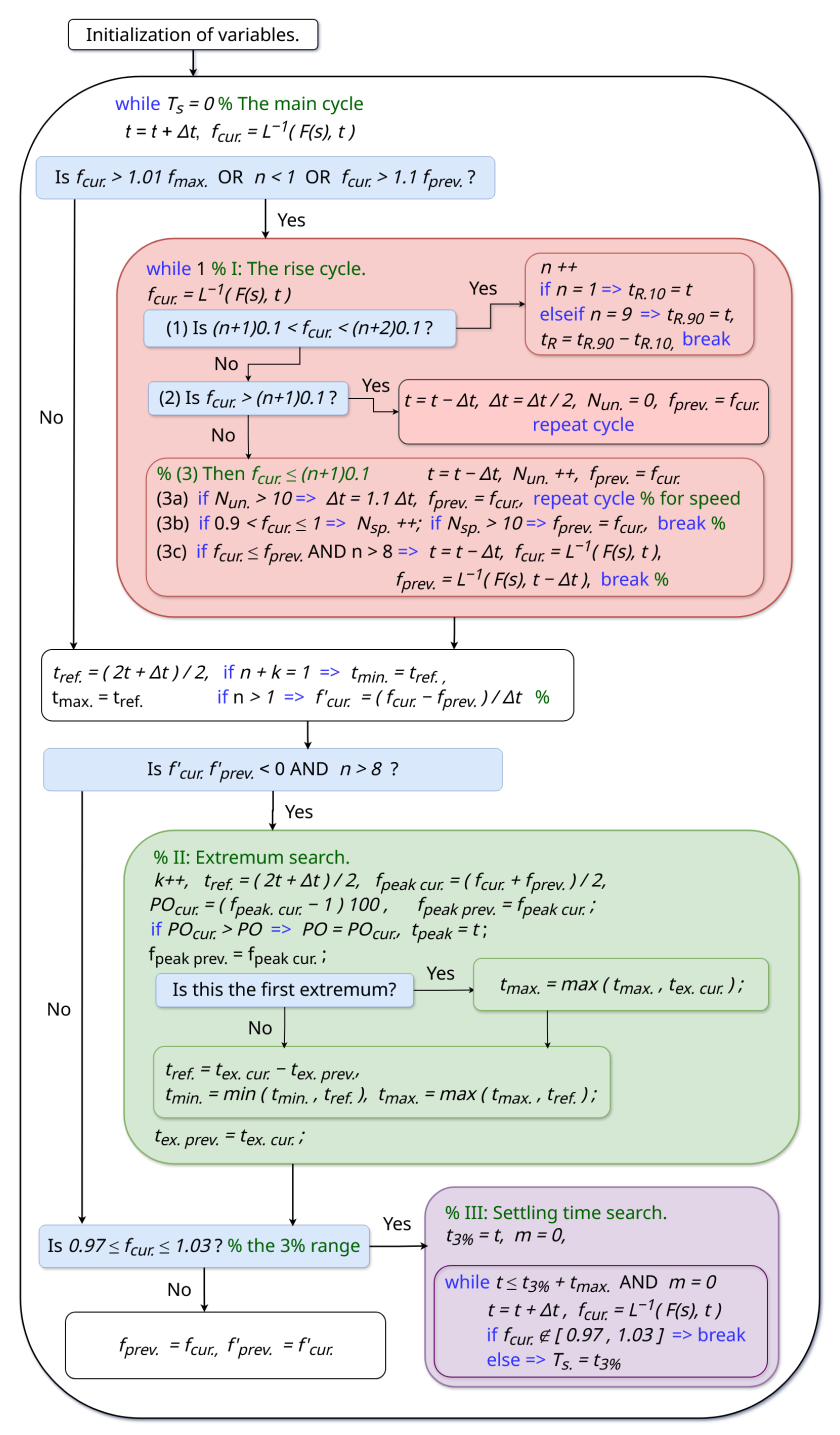
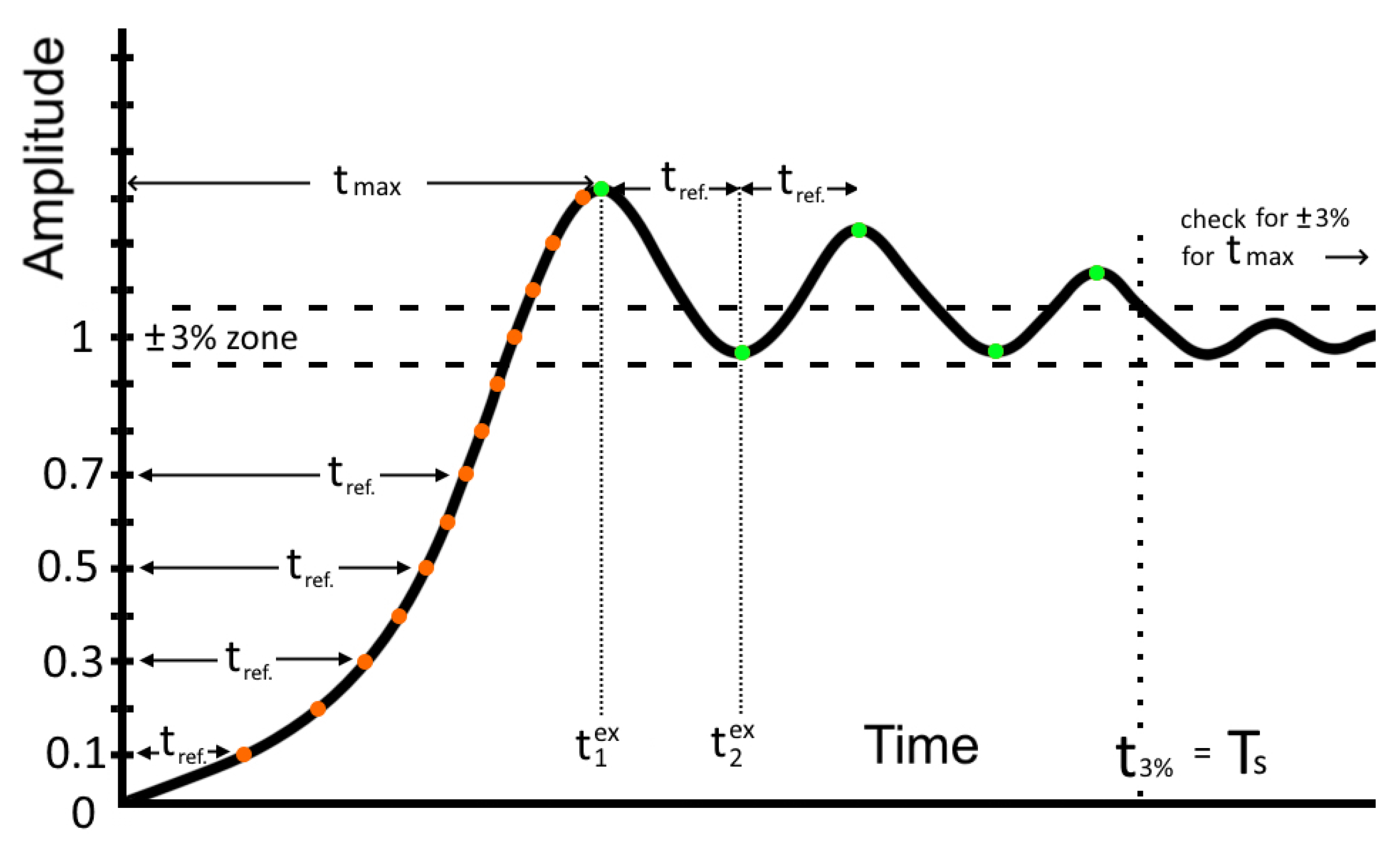
3. The Developed Algorithm
Numerical Tests
- 1.
- starts with
- 2.
- reaches a known steady state value (unity, for example);
- 3.
- is a continuous function for .
- t—time (in seconds) for modeling a step response within the algorithm; starts from zero.
- —the value of the step response signal at the current time t, —at the previous time step.
- —the value of the step response signal’s derivative at the current time t, —at the previous time step.
- —time step. This value changes with the algorithm’s progression, depending on the step response curve. The initial value is close to zero so much that one can ignore any signal changes before the first time step for example 1 ms. This value increases rapidly (see case 3b in the rise cycle in Figure 2).
- —the current recorded reference time. This value changes when the signal crosses a decimal value for the first time. It is also compared to the intervals of time between oscillations, if any.
- n—number of decimal values of amplitude the signal has crossed.
- k—number of local extrema.
- —the minimum of the recorded . The time step is calculated based on this parameter. This provides the algorithm with the ability to distinguish possible rapid oscillations.
- —the number of undershoots in case 3b.
- —the largest reference time This is used as a measure for determining .
- —the time of a current detected local extremum, —the time of the previous one.
- —the amplitude of a current detected local extremum, —same for the previous one.
- —the moment when the signal reaches a range of the steady state value (1, for example).
- —current recorded value of percentage overshoot. May change depending on the curve.
4. Results and Discussion
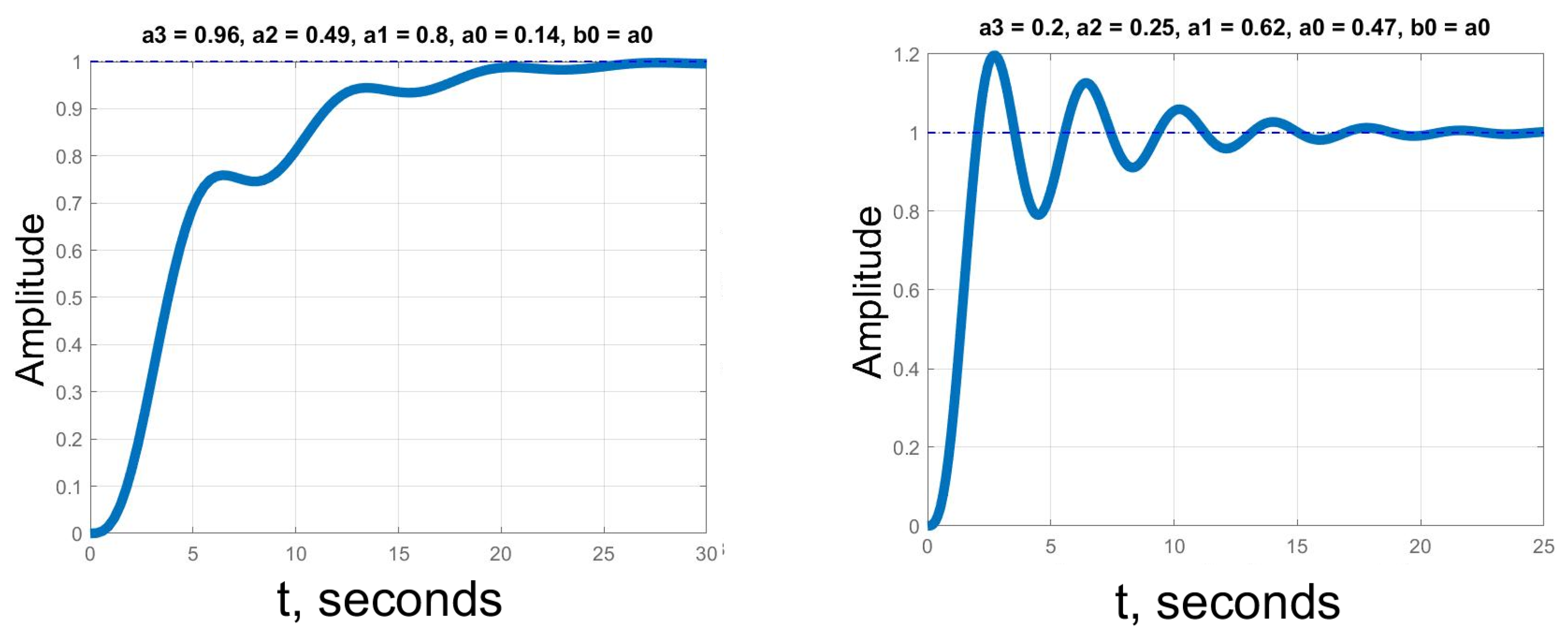
4.1. Numerical Tests
4.2. An Explicit Formula for the Fractional Order Case
5. Conclusions
- 1.
- In this work, a new method for determining step response characteristics is proposed. Based on the conception of a variable time step which depends on the step response curve, this task can be formulated as a new deterministic algorithm. A full description of the algorithm is presented along with a block diagram. It is able to efficiently handle both integer- and fractional-order systems. This decreases the time it takes to process output signals when modeling dynamical systems. Therefore, the algorithm reduces computational costs for a class of optimization problems.
- 2.
- Numerical tests in the integer-order case yielded significant improvements in computational time. Matlab’s Control System Toolbox built-in functions were used as reference. With the mean values of the calculation time of the developed algorithm being up to 4–5 times lower, this approach showed a significant improvement. The mentioned advantage remains true for highly oscillating systems of a higher order. Therefore, the developed algorithm is useful for solving optimization problems which rely on step response characteristics.
- 3.
- A general type of inhomogeneous fractional-order ordinary differential equations and its transfer function were considered. Using the inverse Laplace transformation, we obtained an explicit expression for the time-domain signal of a -controlled fractional-order linear system. This expression combined with the results of numerical tests suggest a generalization of the developed approach for the fractional-order case.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Matlab’s Control System Toolbox User’s Guide; Mathworks: Natick, MA, USA, 2018.
- Ortigueira, M.D.; Tenreiro Machado, J.A. What is a fractional derivative? J. Comput. Phys. 2015, 293, 4–13. [Google Scholar] [CrossRef]
- Sikora, B. Remarks on the Caputo Fractional Derivative. MINUT-Matematyka i Informatyka na Uczelniach Technicznych. 2023, Volume 5, pp. 76–84. Available online: https://minut.polsl.pl/articles/B-23-001.pdf (accessed on 20 October 2024).
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Wiley & Sons, Inc.: New York, NY, USA, 1993; pp. 48, 300. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. (Eds.) Theory and Applications of Fractional Differential Equations; North-Holland Mathematics Studies; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Caputo, M. Linear model of dissipation whose Q is almost frequency independent–II. Geophys. J. R. Astr. Soc. 1967, 13, 529–539. [Google Scholar] [CrossRef]
- Almeida, R.; Bastos, N.R.O.; Monteiro, M.T.T. Modeling some real phenomena by fractional differential equations. Math. Methods Appl. Sci. 2015, 39, 4846–4855. [Google Scholar] [CrossRef]
- Diethelm, K. The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type; Series on Complexity, Nonlinearity and Chaos; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Diethelm, K.; Ford, N.J.; Freed, A.D.; Luchko, Y. Algorithms for the fractional calculus: A selection of numerical methods. Comput. Methods Appl. Mech. Eng. 2005, 194, 743–773. [Google Scholar] [CrossRef]
- Nise, N.S. Control Systems Engineering; John Wiley and Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- William, R.L., II; Lawrence, D.A. Linear State-Space Control Systems, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Tavazoei, M.S. Overshoot in the step response of fractional-order control systems. J. Process. Control. 2012, 22, 90–94. [Google Scholar] [CrossRef]
- Yuce, A.; Tan, N. Inverse Laplace Transforms of the Fractional Order Transfer Functions. In Proceedings of the 11th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 28–30 November 2019. [Google Scholar] [CrossRef]
- Yoneda, R.; Moriguchi, Y.; Kuroda, M.; Kawaguchi, N. Servo Control of a Current-Controlled Attractive-Force-Type Magnetic Levitation System Using Fractional-Order LQR Control. Fractal Fract. 2024, 8, 458. [Google Scholar] [CrossRef]
- Ataslar-Ayyildiz, B.; Karahan, O.; Yilmaz, S. Control and Robust Stabilization at Unstable Equilibrium by Fractional Controller for Magnetic Levitation Systems. Fractal Fract. 2021, 5, 101. [Google Scholar] [CrossRef]
- Muresan, C.I.; Birs, I. Fractional order control for unstable first order processes with time delays. Fract. Calc. Appl. Anal. 2024, 27, 1709–1733. [Google Scholar] [CrossRef]
- Swain, S.K.; Sain, D.; Mishra, S.K.; Ghosh, S. Real time implementation of fractional order PID controllers for a magnetic levitation plant. AEU—Int. J. Electron. Commun. 2017, 78, 141–156. [Google Scholar] [CrossRef]
- Kishore, B.; Rosdiazli, I.; Karsiti, M.N.; Sabo Miya, H.; Vivekananda Rajah, H. Fractional-Order Systems and PID Controllers Using Scilab and Curve Fitting Based Approximation Techniques; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Muresan, C.I.; Bunescu, I.; Birs, I.; De Keyser, R. A Novel Toolbox for Automatic Design of Fractional Order PI Controllers Based on Automatic System Identification from Step Response Data. Mathematics 2024, 11, 1097. [Google Scholar] [CrossRef]
- Sabatier, J.; Lanusse, P.; Melchior, P.; Oustaloup, A. Fractional Order Differentiation and Robust Control Design: CRONE, H-Infinity and Motion Control; Springer: Dordrecht, The Netherlands, 2016. [Google Scholar]
- Xue, D.Y.; Bai, L. Fractional Calculus: Numerical Algorithms and Implementations; Tsinghua University Press: Beijing, China, 2022. [Google Scholar]
- Tepljakov, A.; Petlenkov, E.; Belikov, J. FOMCON toolbox for modeling, design and implementation of fractional-order control systems. In Applications in Control; De Gruyter: Berlin, Germany, 2019; pp. 211–236. [Google Scholar]
- Valerio, D.; Costa, J.S.D. Ninteger: A non-integer control toolbox for MATLAB. In Proceedings of the 1st IFAC Workshop on Fractional Differentiation and Its Applications, Bordeaux, France, 19–21 July 2004; pp. 1–7. [Google Scholar]
- Valerio, D. Ninteger Toolbox for MATLAB. 2008. Available online: https://www.mathworks.com/matlabcentral/fileexchange/8312-ninteger (accessed on 28 October 2024).
- Duist, L.V.; Gugten, G.V.D.; Toten, D.; Saikumar, N.; HosseinNia, H. FLOreS—Fractional order loop shaping MATLAB toolbox. IFAC Pap. 2018, 51, 545–550. [Google Scholar] [CrossRef]
- Kochenderfer, M.J.; Wheeler, T.A. Algorithms for Optimization; The MIT Press: Cambridge, MA, USA, 2019. [Google Scholar]
- Arora, J. Introduction to Optimum Design, 3rd ed.; Academic Press: Waltham, MA, USA, 2012. [Google Scholar]
- Boyd, S.; Vandenberghe, L. Convex Optimization; 7th print; Cambridge University Press: New York, NY, USA, 2009. [Google Scholar]
- Arora, R.K. Optimization: Algorithms and Applications; Taylor and Francis/CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Wilde, D.J. Principles of Optimal Design; Cambridge University Press: New York, NY, USA, 2017. [Google Scholar]
- Belegundu, A.D.; Chandrupatla, T.R. Optimization Concepts and Applications in Engineering, 2nd ed.; Cambridge University Press: New York, NY, USA, 2011. [Google Scholar]
- Doetsch, G. Introduction to the Theory and Application of the Laplace Transformation; Springer: Berlin/Heidelberg, Germany, 1974. [Google Scholar]
- Rowell, D. Analysis and Design of Feedback Control Systems. Available online: http://web.mit.edu/2.14/www/Handouts/Handouts.html (accessed on 10 October 2024).
- Podlubny, I. Fractional-order systems and PIλDμ controllers. IEEE Trans. Autom. Control. 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Agarwal, R.P. A propos d’une note de M. Pierre Humbert. C. R. Seances Acad. Sci. 1953, 236, 2031–2032. [Google Scholar]
- Cartwright, M.L. Integral Functions; Cambridge University Press: Cambridge, UK, 1962. [Google Scholar]
- Reznichenko, I.; Podržaj, P. Design Methodology for a Magnetic Levitation System Based on a New Multi-Objective Optimization Algorithm. Sensors 2023, 23, 979. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 351 | 205 | 0.2 | |
| 11.7 | 15.2 | 4.68 | 0.61 | |
| 0 | 20.4 | 9.83 | 0.26 | |
| 19.5 | 13.7 | 1.17 | 0.27 | |
| 3.26 | 203 | 57.6 | 0.52 | |
| 84.5 | 50.2 | 2.24 | 0.86 | |
| 16.1 | 13.2 | 1.45 | 0.57 | |
| 9.94 | 364 | 9.51 | 0.82 | |
| 40.2 | 205 | 2.4 | 0.91 | |
| 15.3 | 22.8 | 3.19 | 0.73 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reznichenko, I.; Podržaj, P.; Peperko, A. Variable Time Step Algorithm for Transient Response Analysis for Control and Optimization. Fractal Fract. 2024, 8, 710. https://doi.org/10.3390/fractalfract8120710
Reznichenko I, Podržaj P, Peperko A. Variable Time Step Algorithm for Transient Response Analysis for Control and Optimization. Fractal and Fractional. 2024; 8(12):710. https://doi.org/10.3390/fractalfract8120710
Chicago/Turabian StyleReznichenko, Igor, Primož Podržaj, and Aljoša Peperko. 2024. "Variable Time Step Algorithm for Transient Response Analysis for Control and Optimization" Fractal and Fractional 8, no. 12: 710. https://doi.org/10.3390/fractalfract8120710
APA StyleReznichenko, I., Podržaj, P., & Peperko, A. (2024). Variable Time Step Algorithm for Transient Response Analysis for Control and Optimization. Fractal and Fractional, 8(12), 710. https://doi.org/10.3390/fractalfract8120710