1. Introduction
The utilization of fractional equations has rapidly broadened and diversified in a brief span of time. Previous research described the construction of fractional integro-differential equations (
FrI-DEs) from electromagnetic waves in a dielectric material [
1]. The authors in [
2] have focused on the stability analysis of the RLC model by using Hadamard
Fr-DEAs which have been transformed into an equivalent
I-DE. Solutions to a specific type of Cauchy problem with integral conditions for
FrI-DEs have been demonstrated to exist throughout. The use of fixed-point methods has also been demonstrated, as shown in references [
3,
4], where the authors studied the existence of a solution to
FrI-DE using fixed-point theorems and the Banach concept, respectively. In [
5], Hölder’s inequality and Schauder’s fixed point theorem were used to prove the existence and uniqueness of a mild solution for
FrI-DEs with nonlocal initial conditions in Banach spaces.
Several writers are intrigued by various approaches for solving
FrI-DEs. The authors in reference [
6] employed fractional-order Euler functions to solve
FrI-DEs. The introduction of the generalized hat functions and operational matrix in [
7] aimed to address the solution of the
FrI-DEs of Bratu type. The Volterra fractional integral equation (
V-FrIE) was obtained from a linear
I-DE [
8]. The sinc-collocation approach was introduced in [
9] as a solution for Volterra-Fredholm integro-differential equations (
V-FI-DEs). The authors in [
10] presented a Barycentric interpolation collocation method to solve
FrF-VI-DE. The generalized monotone iterative technique was devised to solve the Caputo
FrI-DEs of order
in [
11]. The Bernoulli polynomial approach was introduced in [
12] as a solution of mixed-dimensional difference
I-DEs with coefficients of variables. In [
13], an analysis of spectrum relationships was conducted on an integral operator including a singular kernel. A fundamental theorem for spectral relations was derived, utilizing Chebyshev’s polynomials. The
FIE was derived in [
14], after using an asymptotic method to separate the variables in a mixed integral equation (
MIE). Several numerical solutions have been applied to treat
MIEs in [
15,
16,
17,
18,
19].
Given the importance of applications of MIEs in various sciences such as mathematical physics, genetic engineering, communication issues in media mechanics, and other sciences, researchers’ interest has focused on how to study a mixed equation in space and position. Fractional time has been chosen to show its greatest effect in small times, and the position kernel has been chosen as discontinuous (singular) so that the study is broader and more comprehensive than the continuous kernels.
It is noted that in the previous papers that included fractional time, some authors used one of the following methods: semi-analytical or numerical methods in which the kernel is continuous. However, in this paper, the method of solving the problem differed by choosing a technique in separating the variables that transforms the part related to fractional time into an integral operator of an IE in position. Also, the authors’ choice of a singular kernel in the general form and the use of the TMM transformed the singular integrals in the equation into numerical integrals that are easy to solve.
This paper is organized as follows: we introduce the
I-FrDE with a general form of a generalized symmetric singular kernel in position, under certain conditions in the space
where
is the time. In
Section 2, a
MIE is derived from
I-FrDE. Then, in
Section 3, under certain conditions, the existence of a unique solution is proved using the Banach fixed point theorem. In
Section 4, the stability of the solution and the convergence of the error are discussed. In
Section 5, the separation of variables method is used to obtain an integral equation in position. The coefficients of the IE, in this case, are variable in time
, and the fractional
. In
Section 6,
TMM is used to transform the
IE to a system of linear algebra equations (
SLAEs). In
Section 7, the existence of a unique solution of the
SLAEs is proved, and its stability is considered. In
Section 8, many numerical results are considered and obtained when the discontinuous kernel takes the general form of some different famous form. Additionally, each case’s related error is calculated. In
Section 9, important points in this work are discussed. A general conclusion is given in
Section 10.
2. Formulation of an Integro-Fractional Differential Equation
In this section, let us recall some basics of fractional integrals. To achieve the goal of this paper, the Riemann-Liouville fractional integral will be applied, taking advantage of the initial condition of I-FrDE.
Let represent the Caputo defined fractional differential operator of order , , defined by wherein is the usual integral differential operator of order and is the Riemann-Liouville integer operator of order .
Definition 1. ([
7])
. For all ,
the left Riemann-Liouville fractional integral operator of order , of the function , is defined asIn addition, we require the following necessary condition for .
here,
.
Now, consider, in the space
the
I-FrDE is as follows:
with the condition
The above initial value problem (3) can be transformed using (2) to a Volterra-Fredholm integral equation (
V-FIE) of the second kind with Able kernel in Volterra integral part.
where
It obvious that when , Equation (2) will satisfy the initial condition Special cases of the generalized singular kernel are as follows
Here, we discuss several special cases of the general symmetric singular kernel:
- (i)
the weak singularity forms:
- (ii)
where, in general,
is a smooth function.
Generally, as special cases, let
in the two cases above, the solutions of which have been established by many authors via different numerical approaches; for an overview of such methods, see [
7,
9,
12,
13,
18].
As novel cases in our numerical examples, we consider in application (1) that , whereas in application (2), we assume that
6. The Modified Toeplitz Matrix Method (See [7,18])
The Toeplitz matrix method (
TMM) is one of the popular numerical methods for solving single-integral equations. It has many advantages such as high accuracy and simplicity. The integral equation, after using TMM, has been converted to a
SLAEs that can be easily solved. In this section, we apply
TMM to obtain the numerical solution of the FIE (17) with a symmetric generalized singular kernel
k(|
ω(
u) –
ω(
v)|), and for this, write the integral term in the form
Then, approximate the integral term in the right-hand side by
Here, and are two arbitrary functions to be determined and R is the estimate error.
As the principle idea of
TMM, to obtain the values of the two functions
,
, we assume
, respectively, in formula (19), where
is a monotonic increasing function. This yields a set of two equations in terms of two unknown functions where
and in these cases, the error is vanishing.
Solving the two Equations (20) and (21), we obtain
In view of Equations (22) and (23), the Formula (18) becomes
where
Putting
, and using the following notations,
Thus, the integral Equation (17) takes the following linear algebraic system
where
The matrix
can be written as
, where
is a Toeplitz matrix of order
and
represents a matrix of order
.
The error term
is determined from Equation (16) by letting
to obtain
8. Numerical Results
In this section, we will solve the mixed integral Equation (4) numerically with parameter and . The exact solution is The position interval will be divided into units.
Application 1:
In the following examples, the kernel in the form
Example 1. (logarithmic-quadratic kernel) To find the function F(u,t), we use the notation
Using the exact solution
in (35), we have the position integral equation in the form
where
It is clear that the function
is bounded. Also, for the position kernel condition,
Table 1 and
Table 2 include the exact solution, numerical values, and related errors when the kernel takes a logarithmic type of a cubic function
w(
u) =
u3. Also,
Figure 1 shows the error graphically in six curves for the calculations made for time values of 0.001 and 0.8 with different values of the parameter α = 0.005, 0.03, and 0.9. When
, the highest error is of order 10
−1, whereas the lowest error obtained in
Table 1 is of order 10
−10.
Example 2. (Carleman-cubic function) Following the same method as Example (1) by using the exact solution
and the free function
in Equation
The above equation of is a bounded and a continuous function. Hence, the condition of normality of is satisfied.
Furthermore, for the position kernel condition,
and after integrating we obtain
It is clear that the condition (i) is satisfied.
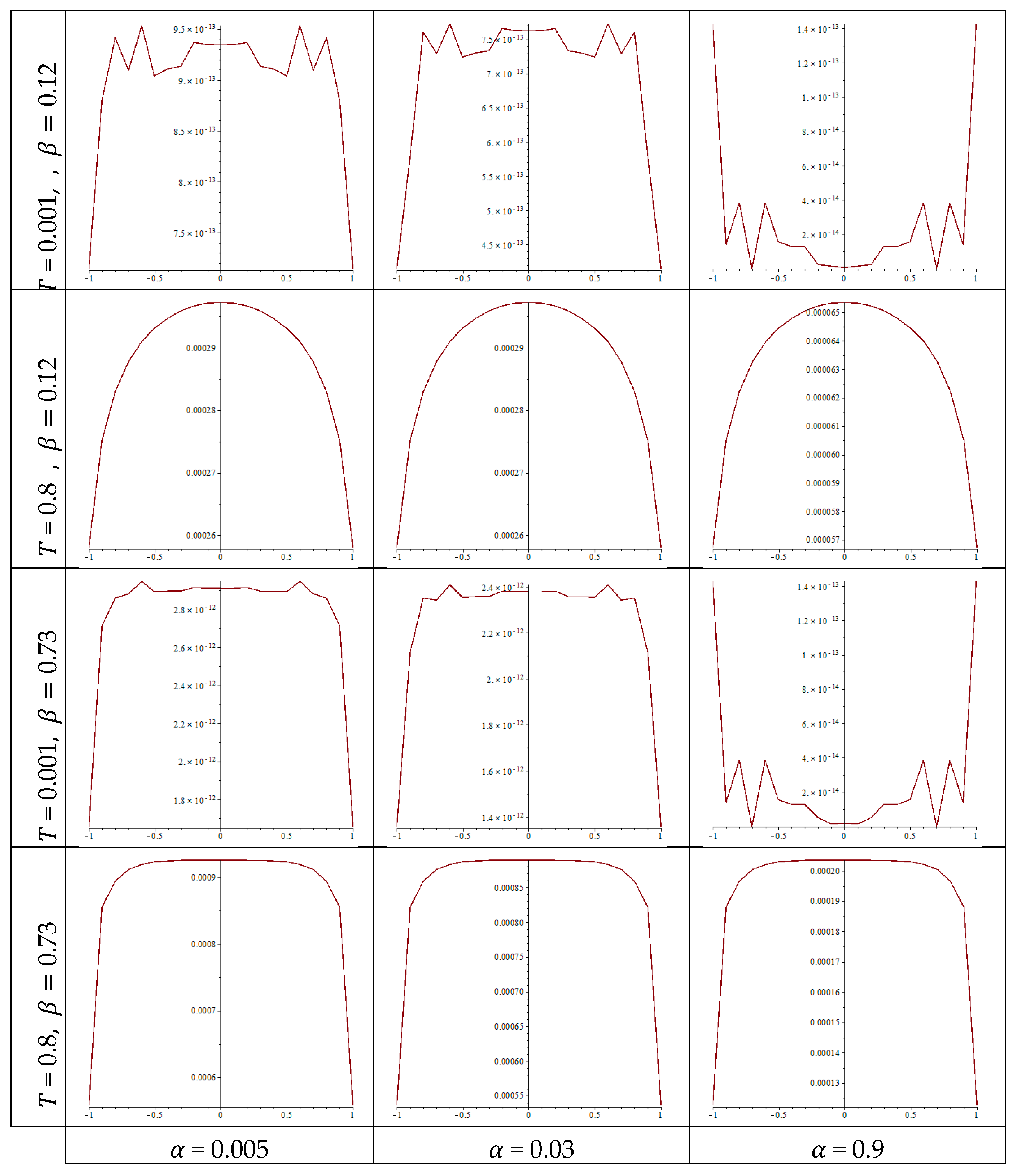
The computed values of the exact and approximate solutions, along with the associated errors, when the kernel takes the Carleman function, are shown in
Table 3,
Table 4,
Table 5 and
Table 6. For the fractional coefficient values
and
, where the Carleman coefficient takes values
, and
.
Figure 2 shows the error values graphically in 12 curves. It is seen that the largest error is of order 10
−1 at
in
Table 6, whilst the smallest error is of order 10
−10 at
in
Table 3.
Example 3. (Cauchy-cubic kernel) According to the assumption of an exact solution and the time function
, the free position function of the above function becomes
From the above formula, we deduce that
Also, for the condition of position kernel, we have
Table 7 and
Table 8 indicate the calculated values of the exact and approximate solutions, as well as the corresponding errors, when the kernel takes the Cauchy kind. At
, the fractional coefficient values
and
are used. The error curves are displayed in
Figure 3. The highest inaccuracy in
Table 8 is of order 10
−1 at t = 0.8, whereas the lowest error in
Table 7 is of order 10
−10 at
.
Application 2:
In this application, and hence the kernel is expressed as with the exact solution
Example 4. (Logarithmic-exponential kernel) Hence, the position term
takes the form
is obviously bounded and continuous for
. Additionally, given condition (i), we perform the following
After integrating, we have
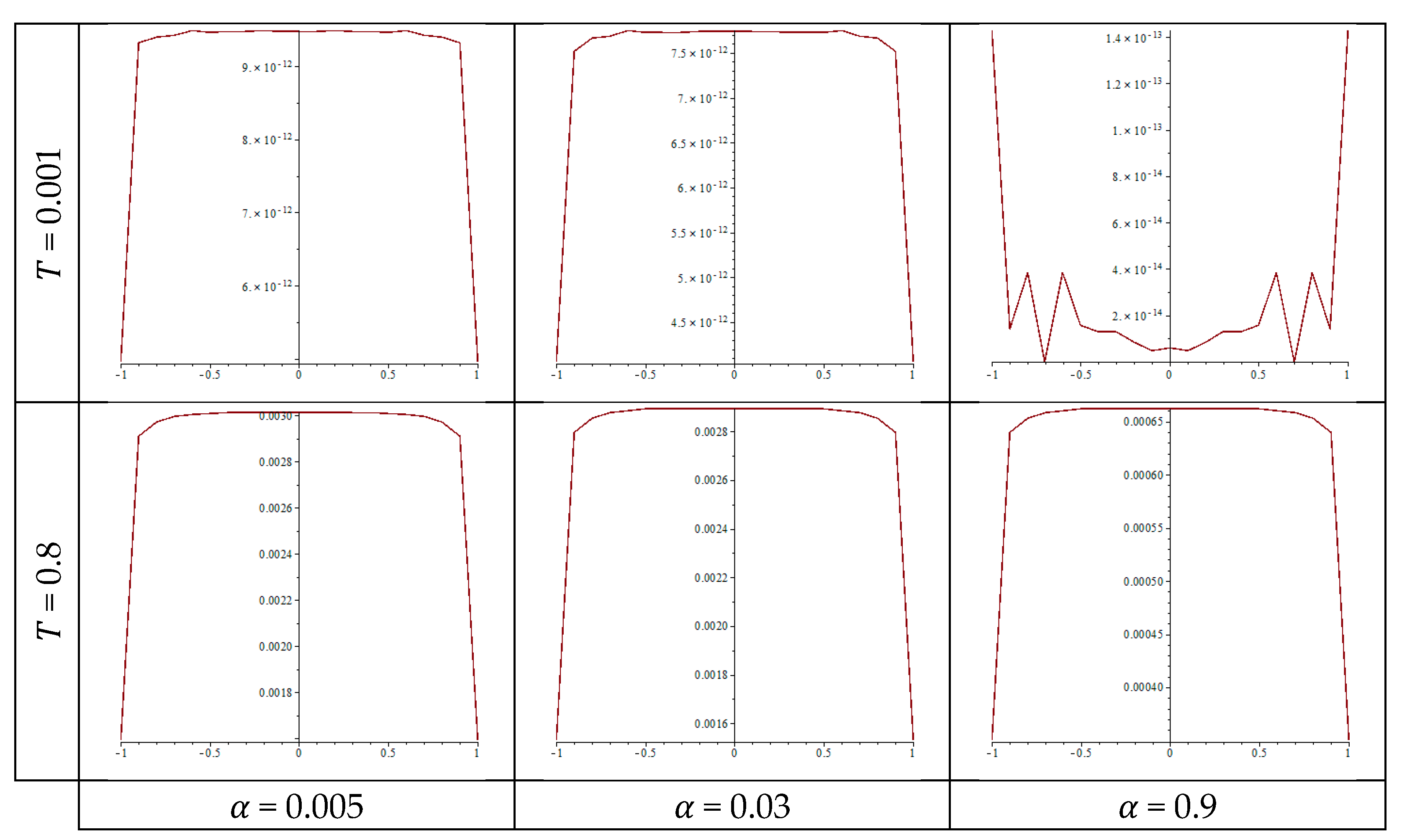
The exact solution, numerical values, and associated errors when the kernel takes a logarithmic type of an exponential function
are shown in
Table 9 and
Table 10. For calculations performed when the time takes the values 0.001 and 0.8 with various values of the parameter
, and
.
Figure 4 indicates the error for these cases in six curves. The lowest accuracy obtained in
Table 10 is of order 10
−2 and the highest is of order 10
−10 in
Table 9.
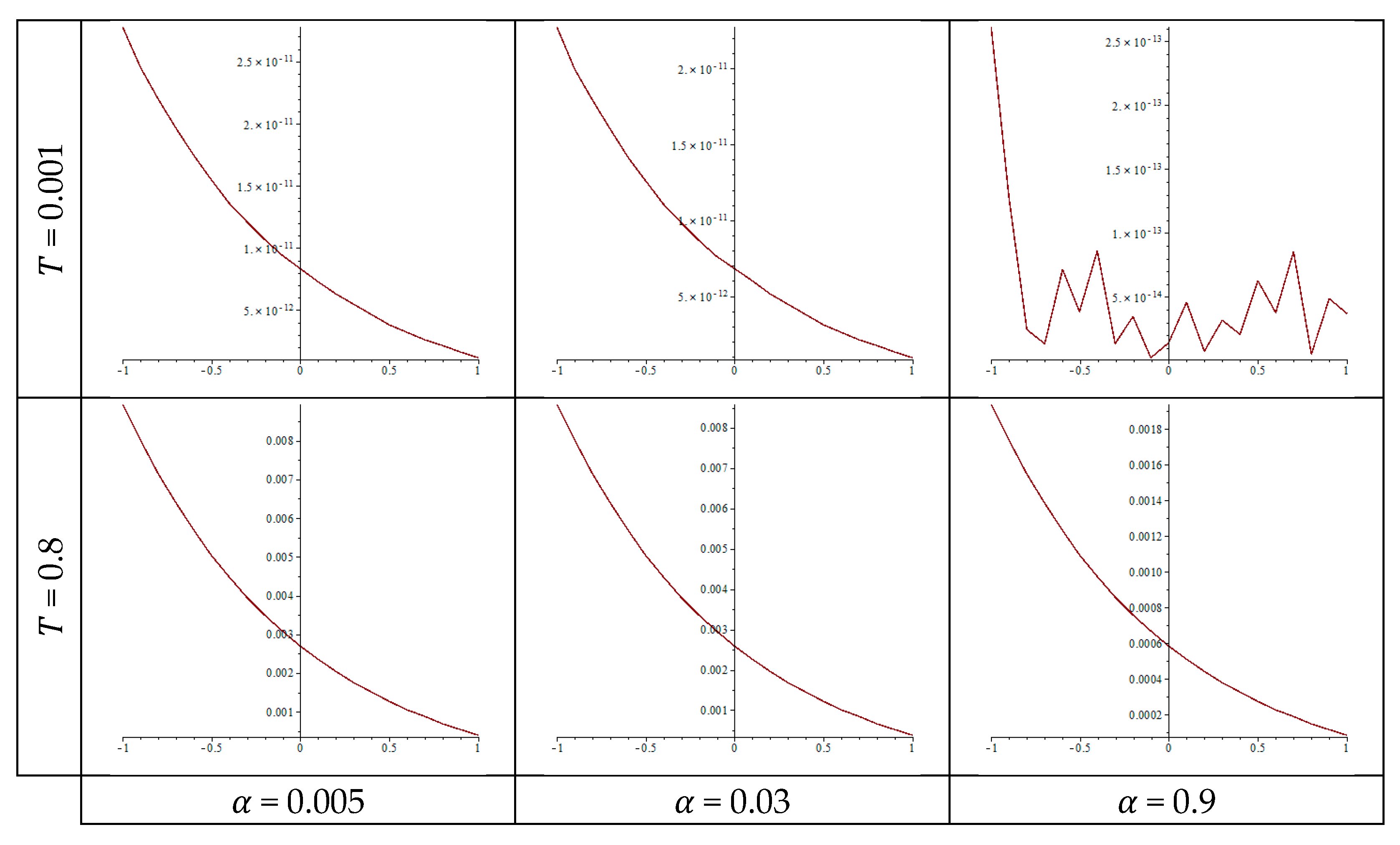
Example 5. (Cauchy-exponential kernel) After separating the variables, we have )/)}, where is bounded and continuous at −1 < u < 1
For the condition of position kernel
Table 11 and
Table 12 indicate the calculated values of the exact and approximate solutions, as well as the corresponding errors, when the kernel takes the Cauchy kind as a function of an exponential function
. The fractional coefficient values are
and
at
. The error values are shown graphically in 6 curves in
Figure 5. The maximum error is of order 10
−2 at
in
Table 12, while the minimum error in
Table 11 is of order 10
−10 at
.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}