1. Introduction
In this article, let
be a bounded domain in
with the sufficiently smooth boundary
. We consider the following problem for the Rayleigh–Stokes equation with a fractional derivative:
Here,
is a constant,
, and
is the Riemann–Liouville fractional derivative, which is defined by [
1]
where
is Gamma function. The fractional Rayleigh–Stokes equation plays an important role in describing the behavior of some non-Newtonian fluids. For instance, the equation can be used for describing the velocity field of a generalized second grade fluid subject to a flow on a heated flat plate and within a heated edge. In this scenario, the Riemann–Liouville fractional derivative can be applied for capturing the viscoelastic behavior of the fluid, see [
2]. If the source function
is known, problem (
1) is a classical direct problem. However, for some practical problems, the source function
may not be given; we want to recover it from some additional data.
In this work, we consider the inverse source problem of the Rayleigh–Stokes problem from the final condition
as follows
For some practical problems, the source function
may not be given, we want to recover it from some additional data. Here, the noisy data
satisfy
where
denotes the
norm and
is a noise level.
The forward problems of Rayleigh–Stokes problems have been studied, including the properties of the solutions [
3,
4] and some numerical methods [
5,
6,
7,
8,
9]. The inverse source problem of Rayleigh–Stokes equation is rarely studied. The main difficulty of the inverse source problem is ill-posedness in the sense of Hadamard (see
Section 3 in detail). According to the definition of Hadamard [
10], a problem is called well-posed if it satisfies: the existence, uniqueness, and stability of the solutions. It implies that if one of three properties is not satisfied, the problem is called ill-posed. To overcome this difficulty, a regularization method is needed. At present, the author [
11] only considers the inverse source problem of the Rayleigh–Stokes equation theoretically by using the filter regularization method without considering the effectiveness of the algorithm numerically. Moreover, the standard Tikhonov regularization method has been applied to the inverse source problem of Rayleigh–Stokes equation [
12], but the solution of standard Tikhonov regularization method over-smooths and can not recover the characteristics of the exact solution well. Therefore, we propose a fractional Tikhonov regularization method to solve the inverse source problem of the Rayleigh–Stokes equation. This method was first proposed in [
13], and order optimality for fractional Tikhonov regularization method has been shown in abstract Hilbert spaces [
14]. It has been used to solve some inverse problems for time-fractional diffusion equation [
15,
16], space-fractional diffusion equation [
17], time-space fractional diffusion equation [
18], and the Cauchy problem of the Helmholtz equation [
19]. The article [
20] was one of the first results to study the problem of identifying the source function for the Rayleigh-Stokes equation. In [
20], a non-local in time condition
was used as additional data.
For other related work, readers can refer to [
21,
22] and the references therein. The contribution of this work consists of the following four aspects. First, we consider an inverse source problem of the Rayleigh–Stokes equation with the final condition. Second, a fractional Tikhonov regularization method is used to identify the unknown source term of the Rayleigh–Stokes equation. Although the theoretical framework of the fractional Tikhonov regularization method is standard, see, for example, [
14], in our situation, properties of the related operators are not easy to verify, some new techniques are needed in the justification. Third, although the reference [
20] considers an inverse source problem of the Rayleigh–Stokes equation from the nonlocal condition, and only obtains the convergence estimate under a priori regularization parameter selection rule. The shortcoming of the a priori regularization parameter selection rule is that it depends on the perturbation error and a priori bound information, which is difficult to give in practical problems. Therefore, this paper gives the convergence estimation under two regularization parameter selection rules, i.e., a priori and a posteriori regularization parameter selections, respectively. The advantage of a posteriori regularization parameter selection rule is that it does not depend on a priori bound information about the solution. Therefore, the posteriori regularization parameter selection rule is more practical. Finally, several examples of the illustration of the effectiveness of the proposed method are shown.
The layout of this article is as follows. In
Section 2, we introduce some preliminaries and a conditional stability for the inverse source problem (
2) is provided. In
Section 3, we provide a fractional Tikhonov regularization method and obtain the convergence estimates under a priori assumption for the exact solution and a priori and a posteriori regularization parameter choice rules, respectively. In
Section 4, we present some numerical examples to illustrate the effectiveness of the proposed method. Finally, a brief conclusion is drawn in
Section 5.
2. Preliminaries
Throughout this article, we use the following definitions and lemmas.
Definition 1 ([
12]).
Let
be the Dirichlet eigenvalues and corresponding eigenvectors of the negative Laplacian operator
in Ω. The family of eigenvalues
satisfy
, where
as
: Let
be an inner product in
. The notation
stands for the norm in the Banach space
X. For
, we denote the Hilbert space
equipped with the norm
Lemma 1. For
we havewhere
. Proof. For
, we solve the equation
, then we obtain that
, which is a global maximizer. So we have
where
. □
Lemma 2. For constants
, then we havewhere
and
. Proof. Case 1: If
, then we solve the equation
. It is easy to prove that
, then we obtain
Case 2: If
, then we have
The proof is completed. □
Lemma 3. For constants
, then we obtainwhere
and
. Proof. The proof is similar to Lemma 2, so we omit it. □
Consider the following more general initial value problem:
According to the eigenfunction expansion, we can obtain the solution of the Rayleigh–Stokes problem as follows:
where
, and
satisfies the following initial value problem for a fractional differential equation:
In particular, let us take
and assume
for every
, we have
i.e., the inverse source problem is equivalent to solve
Obviously, the source function
f is given by the Fourier series
Using [
3], we obtain the Laplace transform of
as follows
Lemma 4 ([
12]).
The functions
, are equal to where Lemma 5 ([
23]).
Let
, we have the following estimate for all
: and there exists the constant D such that where Moreover, we present a useful estimate
Lemma 6 ([
12]).
From Lemma 5, we obtain Next, we have Theorem 1 ([
12]).
Assume that
and for some constant
. Then we obtain where
3. Fractional Tikhonov Regularization Method and Convergence Estimates
From (
17) and Cauchy inequality, we know
Thus,
Using (
15), we know that a small perturbation of the measured data
g will cause a large change in the source function
f. So, the inverse source problem (
2) is ill-posed. The regularization method is needed.
In this section, we propose a fractional Tikhonov regularization method to solve the inverse source problem (
14), and we obtain the convergence estimates by using a priori and a posteriori parameter choice rule, respectively.
Here, we rewrite the Equation (
14) as:
where
Due to
, we know that
K is a self-adjoint operator. The regularized solution with the given data
is the minimizer of the function
defined on
where
plays a role of the regularization parameter, and
is a weighted seminorm defined as
for any
with
for some parameter
called the fractional parameter. If
, it is called the standard Tikhonov method, see [
12]. If
, it is the new fractional Tikhonov regularization method.
The minimizer
f satisfies the normal equations associated with the problem of minimizing
By using the singular decomposition for the compact self-adjoint operator, we obtain
For the noisy data
, we have the fractional Tikhonov regularized solution
Over-smoothing in Tikhonov regularization in standard form (which corresponds to
) is caused by the fact that
is multiplied by
. Setting
is to reduce over-smoothing.
3.1. A Priori Parameter Choice Rule
In this subsection, we consider a priori regularization parameter choice rule.
Theorem 2. Suppose that the a priori conditions (3) and (21) hold. Let
, then we obtain the following convergence estimates: - •
If
, by choosing the regularization parameter
- •
If
, by choosing the regularization parameter
Proof. According to the triangle inequality, we have
Next, we will distinguish two steps to estimate (
30).
Step 1: Estimation for
. By using (
3), (
26), (
27) and Lemma 1, we obtain
Step 2: Estimation for
. By using (
15), (
21) and (
26), we have
Here,
Using the Lemma 6, we obtain
According to Lemma 2, we know
Combining (
21), (
32) and (
33), we obtain
Now, combining the above
two steps, we obtain
Based on the selection of
in (
28) and (
29), we obtain
Case 1: If
, then
Case 2: If
, then
The proof is completed. □
3.2. A Posteriori Parameter Choice Rule
In this subsection, we study a posteriori regularization parameter choice rule in Morozov’s discrepancy principle [
24]. We choose the regularization parameter
as the solution of the following equation,
where
is a constant.
Lemma 7. Setthen the following hold: (1)
is a continuous function;
(2)
as
;
(3)
as
;
(4)
is a strictly increasing function over
.
Proof. The proofs are straightforward if we note that
□
According to Lemma 7, we know that there exists a unique solution
satisfying Equation (
36).
Lemma 8. Let
,
and μ be the solution of (36), we obtainwhere
are defined in Lemma 3. Proof. From (
36), we know
Then, we have
Using Lemma 5, we know
where
and using Lemma 6, we obtain
using Lemma 3 and (
21), we have
Therefore, combining (
40), (
43) and (
44), we obtain
The proof is completed. □
Theorem 3. Let
, and suppose the noise assumption (3) and a priori condition (21), the regularization parameter μ is chosen by Morozov’s discrepancy principle (36), then - •
If
, there holds the following error estimate
- •
If
, there holds the following error estimate
Proof. According to the triangle inequality, we know
Next, we will distinguish two steps to estimate (
47).
Step 1: Estimation for
. Using (
31) and Lemma 8, we have
Step 2: Estimation for
. In order to estimate
, we first give the following estimate
By using Theorem 1, we obtain
Now, we need to estimate
Using (
3) and (
36), we know
Combining the above
two steps and Lemma 8, we have
The proof is completed. □
4. Numerical Examples
In this section, we present three numerical examples to show the effectiveness of our proposed method. In our numerical experiment, we suppose
in problem (
1). Here, we use the MATLAB software.
Because the analytical solution of problem (
1) is difficult to obtain, in order to obtain the final data
, we solve the forward problem with the given data
by a finite difference method, i.e., the backward difference (BD) scheme is provided in [
25]. The observation data
are generated by adding a random perturbation to the “exact" solution
, that is,
Here, the function
is generated by the standard Gauss distribution, and the magnitude
indicates a relative noise level. Here, the total noise
can be measured in the sense of the root mean square error according to
Finally, we obtain the regularized solution through solving an inverse problem, and the regularized solution is compared with the exact solution. It is noted that
is equivalent to the Tikhonov regularization method, and
is equivalent to the fractional Tikhonov regularization method. In our experiment, we only consider the regularization parameter chosen by (
36) with
by using a posteriori parameter choice rule, which is more useful in practical issues.
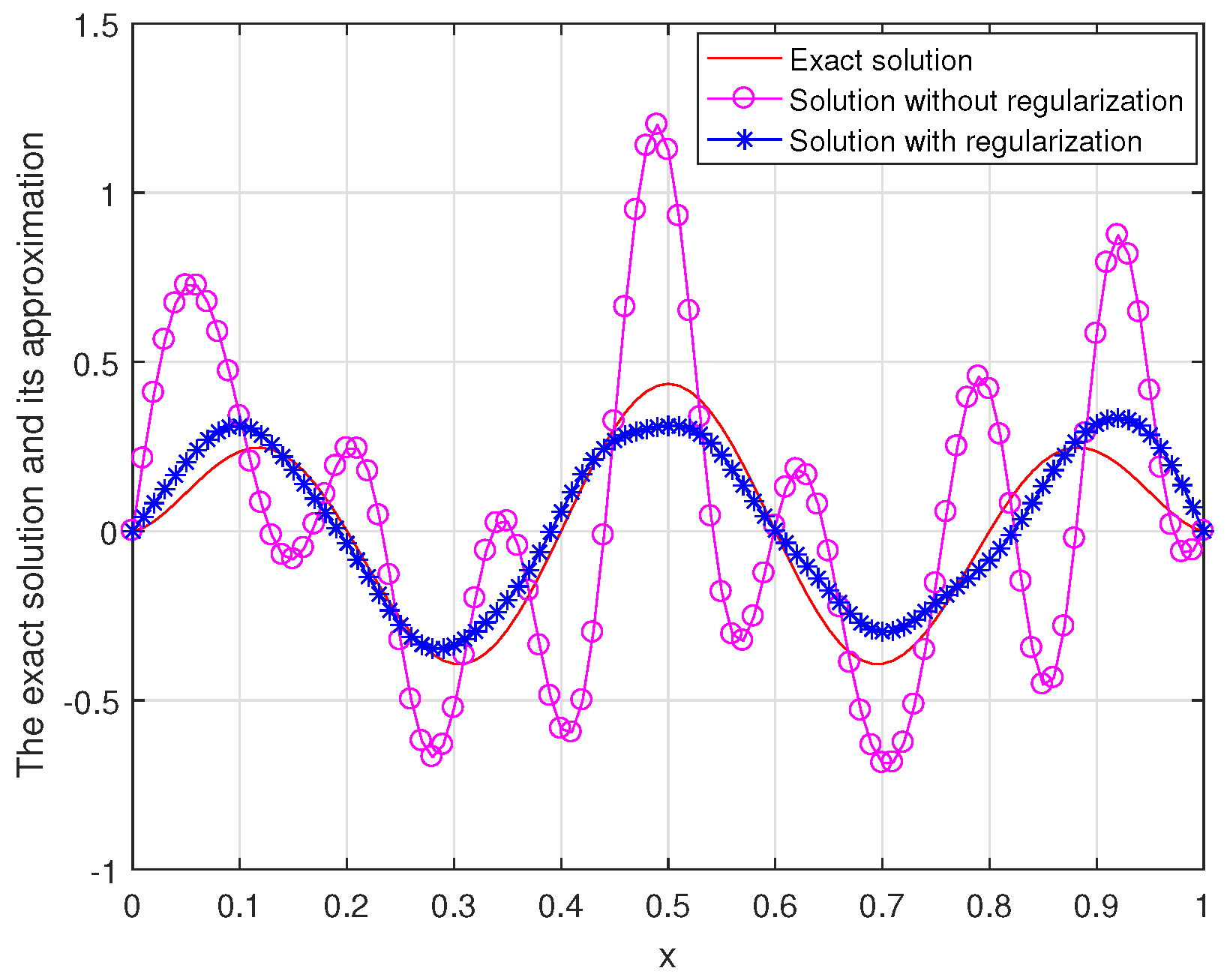
Example 1. Consider a smooth function In
Figure 1, we show the exact solution, the approximation solution without regularization, and the regularized solution for Example 1.
In
Figure 2, we show the comparisons between the exact solution and its regularized solution for various noise levels
and
with
in the case of
.
Figure 3 illustrates the comparisons between the exact solution and its regularized solution for
with
in the case of
.
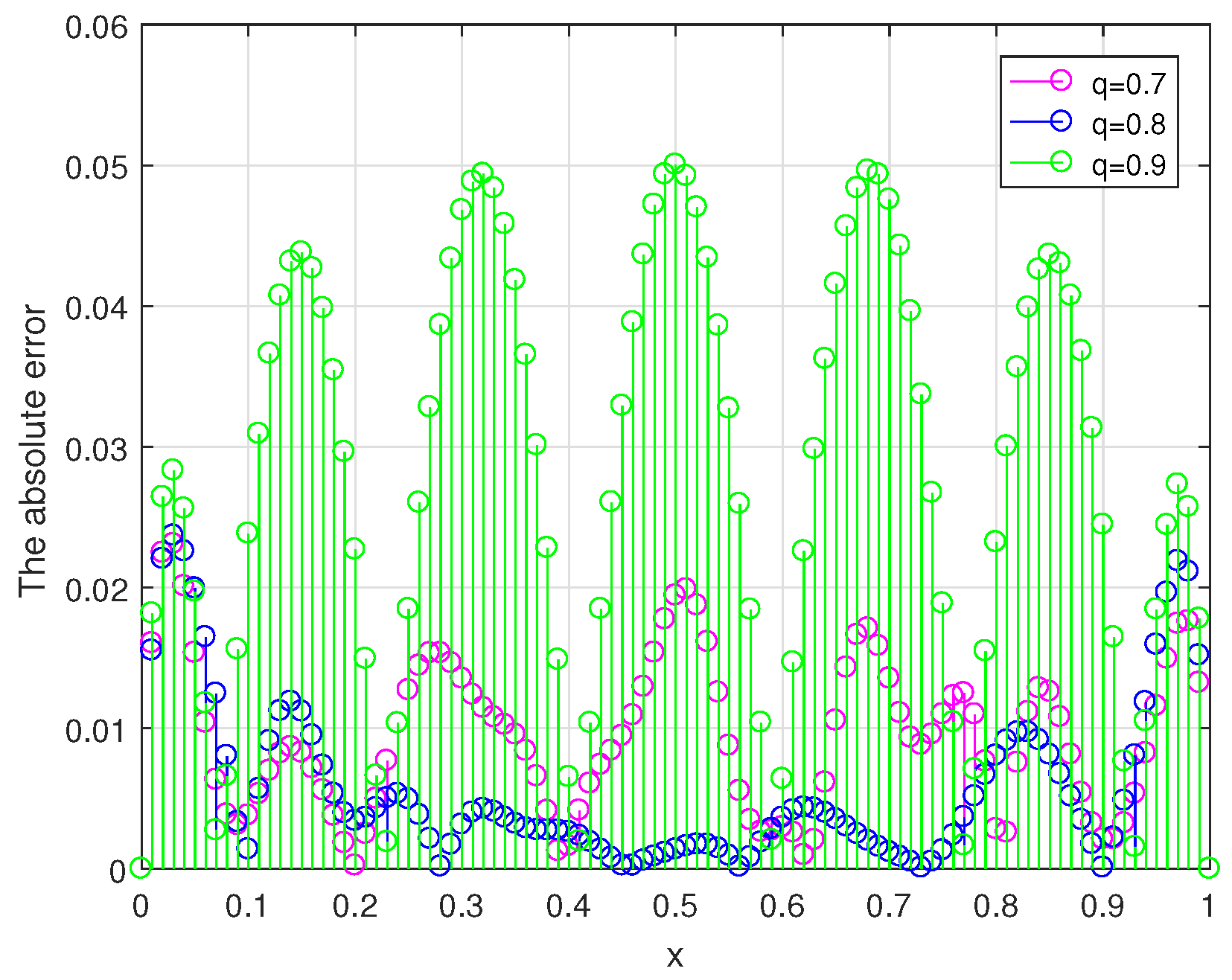
In
Figure 4, the comparison of the absolute error between the exact solution and its regularized solution for
with
in the case of
is shown.
Example 2. Consider a piecewise smooth function In
Figure 5, we show the comparisons between the exact solution and its regularized solution for various noise levels
and
with
in the case of
.
Figure 6 illustrates the comparisons between the exact solution and its regularized solution for
with
in the case of
.
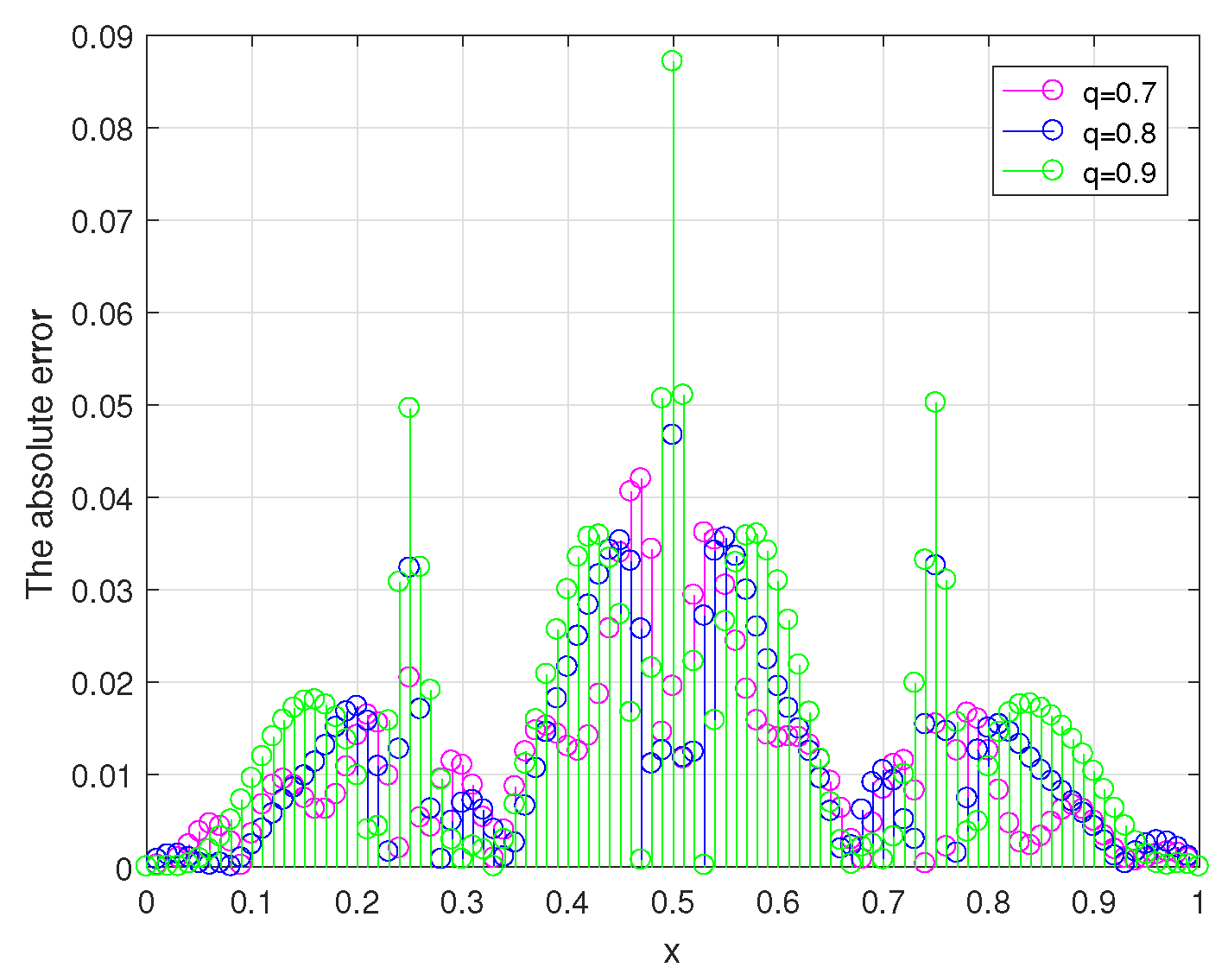
In
Figure 7, the comparison of the absolute error between the exact solution and its regularized solution for
with
in the case of
is shown.
Example 3. Consider a non-smooth function In
Figure 8, we show the comparisons between the exact solution and its regularized solution for various noise levels
and
with
in the case of
.
Figure 9 illustrates the comparisons between the exact solution and its regularized solution for
with
in the case of
.
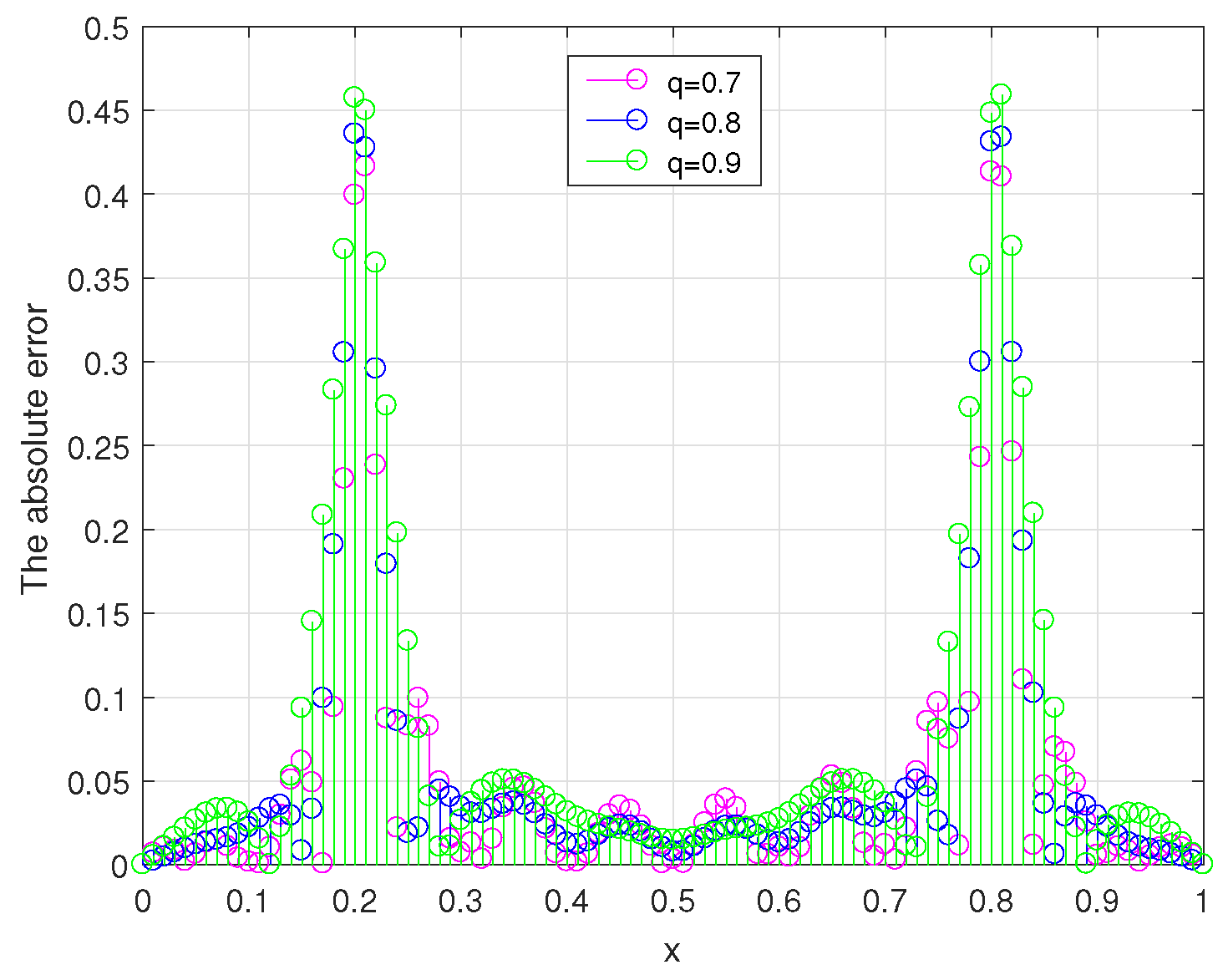
In
Figure 10, the comparison of the absolute error between the exact solution and its regularized solution for
with
in the case of
is shown.
From a numerical perspective, we can draw four conclusions:
Figure 1 shows us that the inverse space-dependent source problem (
2) is ill-posed, and a stable approximate solution can be obtained by using the fractional Tikhonov regularization method.
From
Figure 2,
Figure 5 and
Figure 8, we know that the smaller the parameter
is, the better the computed approximation is.
Figure 3,
Figure 6 and
Figure 9 show that the fractional regularization method (
), Tikhonov regularization method (
), and filter regularization method (
) are stable and effective. However, the Tikhonov regularization method obtains a smoother approximate solution; the fractional Tikhonov regularization method recovers the non-smooth points more accurately, and the filter regularization method can achieve good results for both smooth and non-smooth solutions.
From
Figure 4,
Figure 7 and
Figure 10, we find that for a fixed fractional order
, in order to achieve better regularization results, we need to select the value of the parameter
q appropriately, but the relationship between the two parameters needs further research.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}