1. Introduction and Preliminaries
From this point forward, the symbols , , and will be exclusively employed to denote the set of all real numbers, the set of all non-negative real numbers, and the set of all positive integer numbers, respectively. This notation will be consistently utilized throughout this document to maintain clarity and precision in mathematical discourse.
Fixed point theory remains a dynamically evolving and vibrant area within the mathematical sciences. Its foundational principles and methodological approaches offer broad applications across diverse disciplines, positioning them as indispensable tools for problem-solving within various mathematical contexts. The ensuing references are aimed at shedding light on specific recent advancements within the realm of fixed point theory [
1].
One significant advancement within the realm of metric fixed point theory is the generalization of the metric space structure. This expansion broadens the conceptual framework of metric spaces and marks one of the most vibrant and fruitful areas of contemporary research. The adaptation and enhancement of the metric function have facilitated the introduction of numerous novel topological constructs within scholarly discourse. These modifications, whether through the alteration of the distance function or the incorporation of novel attributes, have paved the way for the emergence of innovative structures. This evolution is particularly pertinent across various specialized fields, including summability theory, sequence spaces, fuzzy theory, and the geometry of Banach spaces, among others, where these newly developed metric functions are extensively utilized.
The renowned question concerning the stability of functional equations, initially formulated by Ulam [
2], presented an intriguing challenge in the field:
Let us consider two distinct structures, where
represents a group and
denotes a metric group endowed with a metric denoted by
d. Given a positive real number
, the inquiry centers on whether it is possible to ascertain the existence of a positive real number
, such that if a function
satisfies the inequality
for all elements
it can then be established that a homomorphism
exists fulfilling the condition
for every element
The discourse on Ulam stability, initially put forth by Ulam [
2], has burgeoned into a significant domain of inquiry within the mathematical research field capturing the scholarly interest of numerous researchers. For those endeavoring to attain an enhanced comprehension of this subject, it is highly advisable to delve into the foundational works by D.H. Hyers et al. in [
3] and M.T. Rassias in [
4].
The research area of “Fractional Differential Equations” (FDEs) has experienced a notable surge in interest over recent years, attributed to its broad applicability across various real-world scenarios within the realms of science, thermodynamics, economics, and modeling, among potentially other fields [
5,
6]. This burgeoning attention stems from the recognition that, while traditional calculus serves as a foundational tool for explaining and simulating the complex behaviour inherent in numerous disciplines, fractional differential equations offer a more nuanced and precise framework for evaluating the intricate dynamics of complex natural systems. Examples of such applications include but are not limited to the mathematical modeling of infectious diseases, diffusion processes for image reconstruction, and the intricate interactions between cancer cells and the immune system. The conventional methodologies fall short of capturing the true essence of these complex dynamics, thereby rendering fractional differential equations a more suitable alternative to ordinary differential equations for such purposes [
7]. In light of this, there has been a significant thrust toward the development of novel scientific methodologies and findings specifically tailored to fractional differential equations. This has led to a concentrated effort among researchers to delve into initial and boundary value problems that incorporate various types of derivatives, including but not limited to Atangana–Baleanu, Caputo–Fabrizio, and Caputo derivatives. The recent period has witnessed a remarkable expansion in the volume of research dedicated to this topic, yielding a plethora of both intriguing and practically relevant outcomes, as evidenced by the literature [
8,
9,
10,
11,
12].
A notable example of such advancements is the introduction of the
b-metric function, distinguished by the inclusion of a coefficient within the triangle inequality. This function, pioneered by Czerwik [
13,
14], represents the most significant extension of the metric function concept over the past four decades. Specifically, a function
is identified as a
b-metric function on a non-empty set
provided it adheres to the revised axiom:
where
is a constant greater than 1, thereby introducing a scalable factor to the traditional metric space definition, facilitating a broader spectrum of analytical and geometrical applications.
The concept of a quasi-metric was initially elucidated in 1931, delineating a foundational aspect within the domain of mathematical analysis. The definition provided is as follows:
Definition 1 ([
15,
16,
17]).
Consider a non-empty set Ξ, on which we define a function that maps pairs of elements from Ξ to positive real numbers. For all , q is designated as a quasi-pseudo-metric on Ξ if it fulfills the ensuing terms:;
Moreover, a quasi-pseudo-metric q ascends to the status of a quasi-metric, provided it adheres to an additional stipulation:
, which introduces a symmetric condition leading to the identification of distinct elements.
Expanding upon this framework, a quasi-metric q is recognized as a -quasi-metric on Ξ if it encounters a further criterion:
.
This exposition into the realm of quasi-metrics not only underscores their theoretical significance but also amplifies their applicability across diverse mathematical landscapes.
In the seminal work of Nakano [
18], the concept of a modular space was introduced, marking a pivotal moment in the field. Following this foundational development, Chistyakov [
19,
20] significantly advanced the discourse on modular spaces by proposing the notion of a modular metric space. This concept has garnered considerable attention and achieved remarkable success, particularly over the past decade, largely due to its compelling physical interpretation, enhancing its appeal within the realm of metric functions.
Definition 2 ([
19,
20]).
Let . A function , defined by , is called a modular metric on Ξ if it satisfies the subsequent axioms for all :-
for all ⇔;
-
for all ;
-
for all
In the event that the axiom , delineated below, is furnished in place of , is designated as a pseudo-modular metric on the set . This can be articulated as follows:
-
For every , it holds that .
This formulation is essential for extending the traditional scope of modular metrics, facilitating a broader spectrum of mathematical analysis and topology applications.
The introduction of the concept of modular
b-metric spaces was initially put forth by Ege and Alaca [
21] in 2018, marking a pivotal moment in the domain of metric space analysis. This foundational work proposed a nuanced alteration to the requirement
within the established Definition 2, thereby extending the theoretical framework and potential applicability of modular metric spaces. This novel adjustment has subsequently facilitated the opening of new pathways for investigation and exploration within the discipline, underscoring the perpetual evolution and profundity of mathematical inquiry:
-
an element
exists such that, for all
and for all
,
It is established that a modular metric space can be derived from a modular
b-metric space under the condition that
. Also, the set
is known as a modular
b-metric space (around
). Further, refer to [
22,
23,
24,
25,
26,
27] to learn more.
In 2019, Girgin and Öztürk [
28] innovatively merged existing principles to develop what is known as a quasi-modular metric space, presenting a novel generalized metric space framework. Further, they elucidated specific topological characteristics inherent to this space, marking a significant contribution to the field. Beyond these foundational developments, the duo proposed various fixed point theorems, opening avenues for practical applications through the establishment of a non-Archimedean quasi-modular metric space. Notably, when the emphasized space was integrated with a directed graph, the application of a simulation function facilitated the derivation of fixed point results, underscoring the practical implications and versatility of their work [
29].
Definition 3. Let be a function on a non-void set Ξ. If the statements
for all and
for all and
are provided, then is termed a quasi-modular metric on Ξ, and is a quasi-modular metric space, which is abbreviated by .
Moreover, if we consider the below condition instead of , then we gain the features of non-Archimedean space; that is, is a non-Archimedean quasi-modular metric space (briefly ).
In the pursuit of enhancing productivity within the realm of fixed point theory, numerous scholars have embarked on an endeavor to augment the Banach contraction principle through the incorporation of auxiliary functions across various abstract spaces. This area of research is currently in a state of active exploration. A noteworthy advancement in this field is the identification of a novel class known as simulation functions, a contribution made by Khojasteh et al. (2015) [
30], delineating a considerable milestone in the evolving landscape of fixed point theory.
Definition 4 ([
30]).
A function is a simulation function if the following statements are ensured:;
for all ;
If , are sequences in such that , then
In addition, from , it consequently ensues that for all .
It is hereby acknowledged that the notation
accurately denotes the comprehensive set of all simulation functions.
Definition 5 ([
30]).
A mapping on a metric space is entitled as a contraction with respect to if the inequalityis fulfilled for all In exploring the realm of Banach contraction mappings, one can elucidate their nature through the employment of simulation functions, denoted as . These functions are characterized by the relationship , which is applicable for every , where is constrained within the interval . This relationship underscores the foundational principle of contraction mappings within the context of mathematical analysis, offering a nuanced perspective on the dynamics between functions within specified domains.
Building upon the foundational work in the field, Samet et al. [
31] introduced the notion of
-admissible mappings, significantly contributing to the domain’s understanding. Following this pioneering effort, Karapınar et al. [
32] expanded upon the initial concept, offering a broader generalization that has been widely noted and appreciated in subsequent academic discussions and analyses.
Definition 6 ([
31]).
Let and be two mappings. Then, ℶ is named α-admissible if the statementis fulfilled for all Definition 7 ([
32]).
Let and be two mappings. The mapping ℶ is called triangular α-admissible if the axioms and
and , then
are provided for all
On the other hand, let be a function providing the subsequent statements:
is nondecreasing;
, where represents the times composition of .
Thereupon, is referred to as comparison functions, and note that for any . Also, let symbolize the family of all such functions.
In 1996, Berinde [
33] enhanced the idea of a
comparison function to broaden the applicability of fixed point theorems to the category of
b-metric spaces.
Definition 8 ([
33]).
Let be a function and with . If the following circumstances are met, then the mapping ψ is termed a comparison function:ψ is nondecreasing;
There exist , and a convergent series of non-negative terms such thatfor and any . Moreover, the family is denoted to symbolize all such functions.
Besides that, a comparison function and a comparison function coincide in the case of .
The lemma is essential at the stage of proving our main results.
Lemma 1. Let be a comparison function. Thus, the ensuing circumstances exist:
The series converges for any ;
The function defined by is increasing and continuous at the point
In work presented by Samet et al., a novel notation is introduced, which is meticulously developed with consideration toward admissible mappings. This conceptual framework is outlined in their study, referenced [
31].
Definition 9. Let be a given mapping on a complete metric space . If there exist and satisfying the inequalityfor all , then the mapping ℶ is entitled contractive. Building upon the foundational concepts introduced earlier, this study aims to delineate and explore the nuances of quasi-modular b-metric spaces alongside their non-Archimedean counterparts. Furthermore, this discourse delineates specific topological characteristics inherent within these spaces. Subsequently, the investigation unveils novel findings related to fixed points by proposing a framework for generalized simulative contraction within the realm of non-Archimedean quasi-modular b-metric spaces.
2. Some Topological Features in the Setting of a Quasi-Modular Metric Space
The current section extends the idea of through a b-metric function, which is referred to as a quasi-modular b-metric space, as mentioned below:
Definition 10. Let Ξ be a non-void set. A function is entitled a quasi-modular b-metric (briefly ) with on Ξ if the statements
for all ,
for all and
are met, and thence, is a quasi-modular b-metric space denoted by .
Moreover, we replace the condition of with the following one; then, is entitled as a quasi-pseudo-modular b metric on :
for all and
Also, a on is termed as regular if the below weaker criteria hold instead of :
if and only if for some
Additionally, is termed convex if for and the inequality provides:
Definition 11. In the definition of , if we replace with
for all and , then is named non-Archimedean quasi-modular b-metric space, which is specified by .
Since the axiom implies , every is a .
Remark 1. Taking the aforementioned information into account, we yield that
For a on Ξ, the conjugate on Ξ of is defined by ;
If is a -quasi-pseudo-modular b metric on Ξ, then is represented by , that is,defines modular b-metric spaces.
Each
on
induces
topology
on
, which owns, as a base, the family of open
balls
where
for all
,
and
. If
is a
topology on
, then
is a
on
.
Definition 12. Let be a sequence in a provided that . Then, the sequence is termed
convergent or left convergent if
convergent or right convergent if
convergent if and
Left (right) Cauchy if for every , exists such that for all with and for all .
Cauchy if, for every , there exists such that for all with .
Definition 13. Those below can be expressed through the above definition:
A sequence is left Cauchy with regard to ⇔ it is right-Cauchy with regard to ;
A sequence is Cauchy ⇔ it is left and right Cauchy.
Definition 14. A is called:
Left complete if every left Cauchy is convergent.
Smyth-complete if every left Cauchy sequence is convergent.
bicomplete if is a complete general modular b-metric space.
Every Smyth-complete is left as a complete space. The contrary is not accurate in general.
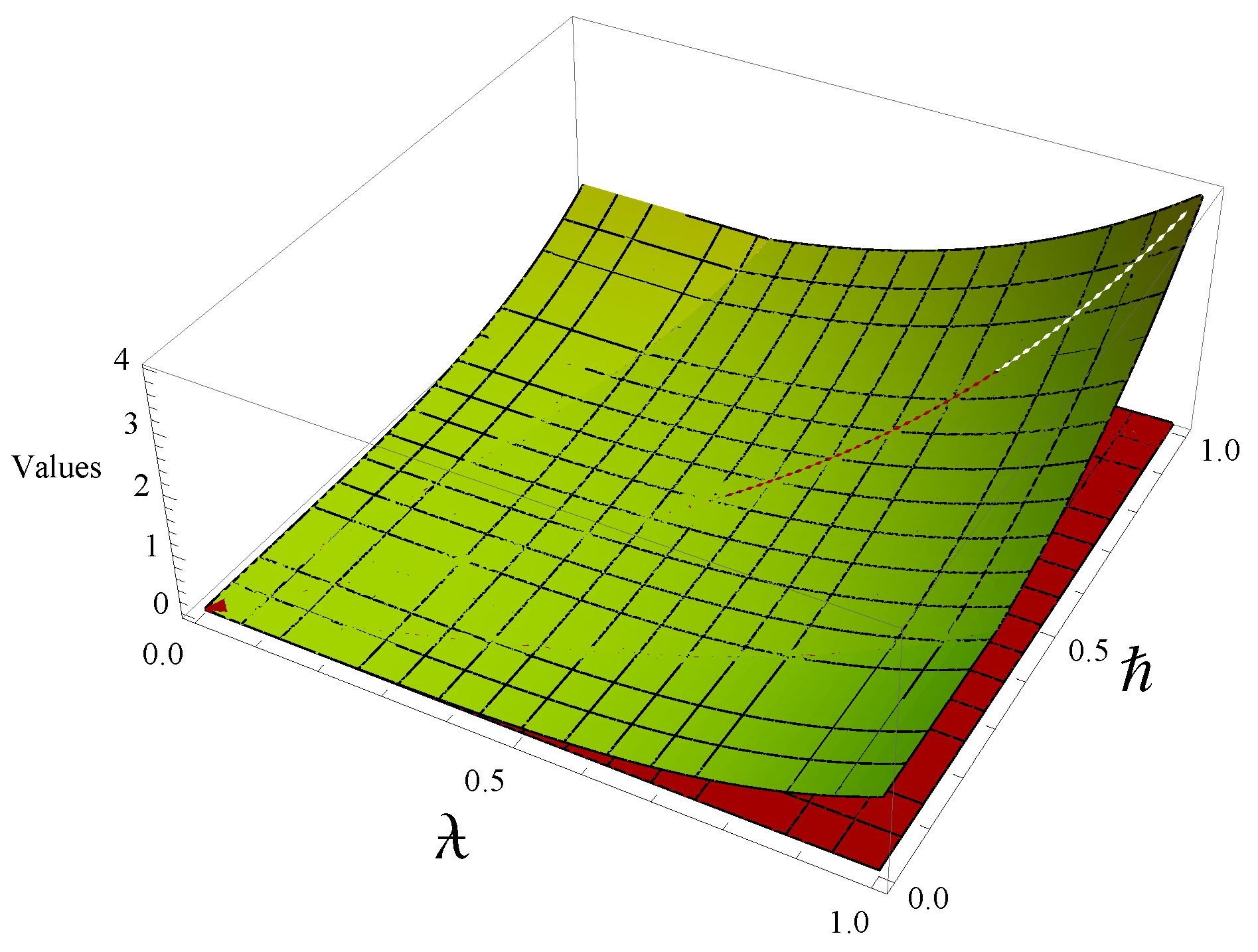
Example 1. Let , and consider the quasi-modular b metric byIn Figure 1, we present an illustration of Equation (1), specifically when and within the interval : Indeed, note that for all and for all . Moreover, is not symmetric provided that for all . Assuming , , and , we may deduce that the inequalityis not satisfied in the case of , i.e., is not a non-Archimedian quasi-modular metric function. However, by taking , we yield that is a non-Archimedian quasi-modular b metric, and consequently, is a . 3. Fixed Point Results
In the analysis that follows, we make use of the following property:
ℶ is a triangular -admissible mapping, and an element exists such that .
Definition 15. Let be a and be a given mapping. Then, the mapping ℶ is entitled a generalized simulative contraction if there exist , , and such thatwherefor all Theorem 1. Let be a Smyth-complete with Presume that ℶ is a generalized simulative contraction and provides the subsequent statements:
The condition is met;
The mapping ℶ is continuous.
Then, ℶ admits a fixed point in .
Proof. Assume that
exists such that
. Form the sequence
in
by
for all
If
for some
then
is a fixed point for
ℶ and the proof has been concluded. As a result, we conclude that
for all
Because
ℶ is triangular
-admissible, we have
⇒
By induction, we obtain
for all
Regarding (
2), we attain
Then, from (
5), we have
where
If
then, from (
6), we gain
which is a contradiction. Thence,
and we obtain
By induction, we obtain
for all
From (
7) and by using
and the non-Archimedean property of our space, for all
we have
By denoting
, we attain
Thereupon, from Lemma 1, we learn that the series
is convergent. Hence, there exists
Considering
and inequality (
8), we obtain that
is a left
Cauchy sequence. Since
is a
Symth-complete
, there exists
such that
as
The continuity of
ℶ provides that
as
By the uniqueness of the limit, we achieve
which means that
is a fixed point of
□
Next, we present a new result by disregarding the continuity of ℶ.
Theorem 2. Let be a Smyth-complete with Assume that ℶ is a generalized simulative contraction provided that the below statements hold:
The condition holds;
If is a sequence in such that for all , and as then for all
Then, ℶ admits a fixed point in .
Proof. By continuing as in the proof of Theorem 1, we procure that
is a left
Cauchy sequence in the
Smyth-complete
. So, there exists
such that
as
Also, from (
4) and Hypothesis
, we achieve
for all
. Here, we presume that
and using the triangular inequality and the expressions (
2) and (
9), we derive
which is equivalent to
where
Here, by letting
in (
10)–(
12), from the property of
, we conclude that
which is a contradiction, that is,
□
The following hypothesis is sufficient to obtain the uniqueness of the fixed point of ℶ.
For all where is the set of all fixed points of ℶ, we obtain
Theorem 3. Besides the conditions of Theorem 1 (resp. Theorem 2), if we attach , then we yield the uniqueness of the fixed point of ℶ in .
Proof. We presume that
is an another fixed point of
ℶ, which means that
From the hypotheses
, we obtain
Since
ℶ is a generalized simulative
contraction, we have
which is equivalent to
where
Thus, we obtain
which is a contradiction. Hence,
ℶ has a unique fixed point in
. □
Considering the inherent characteristics of simulation functions, deducing the subsequent outcome directly from these properties is possible.
Corollary 1. Let be a Smyth-complete with Presume that ℶ is a self mapping on such that the following statements are fulfilled:
Two functions and exist such thatwhere as defined in (3), for all The condition is satisfied;
ℶ is continuous;
The axiom is provided.
Thereby, ℶ admits a unique fixed point in .
Example 2. Let . Regarding the quasi-modular b metric and the function byandrespectively. In light of the preceding discourse, it is imperative to assert that epitomizes a Smyth-complete entity within the framework of , wherein is posited to equal 2. Concurrently, it is essential to delineate the functions of the mapping ℶ alongside ψ, which is a member of . The function ℶ is hereby defined as , and ψ is articulated through the relationship , presenting a foundational underpinning for further academic inquiry within this domain. We aim to prove that the inequality (13) holds, that is, The subsequent figure illustrates the contractive condition applicable for all elements within the closed interval .
Moreover, in the case of , it is clear that the results are satisfied. Therefore, for all with and , we have Using simple calculations, we yield thatfor all and . So, we achieve that the inequalityis satisfied, so inequality (13) is met which is represented as in Figure 2. As a result, the hypotheses of Corollary 1 are contended, and the point is the fixed point of the mapping ℶ. Corollary 2. Let be a Smyth-complete with Presume that ℶ is a self mapping on such that the following statements are fulfilled:
Two functions and exist such thatfor all The condition is satisfied;
ℶ is continuous;
The axiom is provided.
Thereby, ℶ admits a unique fixed point in .
Corollary 3. Let be a Smyth-complete with , and be a self mapping on . If the following circumstances are provided, then ℶ owns a unique fixed point in :
A function and an element exist such thatfor all The condition is met;
ℶ is continuous;
The axiom is satisfied.
Corollary 4. Let be a Smyth-complete with and ℶ be a self mapping on . Assume that the follow circumstances are met:
There exist two functions and such thatfor all The condition is provided;
If is a sequence in such that for all n and as then for all
The axiom is fulfilled.
Thus, ℶ owns a unique fixed point in .
Corollary 5. Let be a Smyth-complete with Assume that ℶ is a self mapping on , satisfying the below axioms:
There exist functions and such thatfor all The condition is met;
If is a sequence in such that for all n and as then for all n.
The axiom is provided.
Thereupon, ℶ owns a unique fixed point in .




 ,
, 

{kind=link}
{kind=link}